Centro Federal de Educação Tecnológica de Santa Catarina
Departamento Acadêmico de Eletrônica
Conversores Estáticos
C
Conversores
CC
CC--CC Nã
Não-Isolados
NãoI l d
Modelagem do Conversor
Prof. Clóvis Antônio Petry.
Florianópolis, maio de 2008.
Bibliografia para esta aula
Capítulo 9: Choppers DC
1 Modelagem do conversor Buck para controle em malha
1.
fechada.
www cefetsc edu br/~petry
www.cefetsc.edu.br/
petry
Nesta aula
Conversores CC
CC--CC – Modelagem de pequenos sinais do
conversor Buck
Buck::
1. Introdução;
2. Modelagem do conversor Buck;
3. Modelagem do filtro de saída;
4 Modelo do conversor completo;
4.
5. Verificação das funções de transferência.
Operação em malha aberta x malha fechada
Operação em malha aberta:
aberta:
- Circuitos simples;
- Geralmente sem problemas de estabilidade;
- Erros estáticos (de regime) grandes;
- Respostas
p
transitórias com sobresinal;;
- Projeto simples;
- Conformação de sinais complicada.
Operação em malha fechada
fechada::
- Circuitos mais complexos;
- Podem apresentar problemas de estabilidade;
- Erros estáticos praticamente nulos;
- Melhora da resposta transitória;
- Projeto complexo;
- Possibilidade de conformar sinais.
Diagrama de blocos do conversor
Diagrama de blocos do conversor
vi
F (s)
+
+
vo _ ref
+
−
erro
C (s)
v *o
vo ( s )
F (s) =
vi ( s ) d = 0
vc
Fm ( s )
d
G (s)
H ( s)
vo ( s )
G (s) =
d ( s ) v i = 0
vo
Técnicas de controle de conversores
Principais técnicas de controle de conversores estáticos
estáticos::
- Técnicas lineares x não
não-lineares;
lineares;
- Controle clássico x controle moderno;
- Controle no domínio do tempo x domínio da freqüência;
- Controle p
por histerese;;
- Controle fuzzy;
- Controle adaptativo;
- Controle por variáveis de estado;
- Controle por modos deslizantes;
- Entre outros.
Controle por valores médios instantâneos
Linearização nas proximidades do ponto de operação
Considerações para valores médios instantâneos
Controle no domínio da freqüência:
freqüência:
- Os componentes do conversor são considerados
invariantes no tempo;
- Resistores, indutores e capacitores, bem como os
interruptores
p
p
passivos e ativos,, são considerados ideais;;
- As ondulações de corrente e de tensão são ignoradas na
modelagem, isto é, o conversor é considerado linear e
não chaveado;
- A freqüência de operação é fixa;
- O conversor opera no modo de condução contínua;
- São válidos os princípios de linearidade e superposição.
Modelo da chave PWM de Vorpérian
Modelo da chave PWM de Vorpérian
Modelagem do sistema
Conversor
+
Li
Lo
S1
Ri
vi
vri = v f
+
+
+
D1
vab
Co
Ro
vo
Ci
−
−
Filtro de entrada
−
−
Filtro de saída
Modelagem do conversor Buck
a
+
+
vi
vap
−
−
v ab
G1 ( s ) =
d
c
+
S1
vab
D1
−
v ab
F1 ( s ) =
v i
p
Modelagem do conversor Buck
+
ii
a
− veq +
vi
c
1: D
ieq
−
ic
+
vcp
−
+
vap
−
p
f = F + lf
ieq = I c ⋅ d
+
Vap veq =
⋅d
D
vab
−
Modelagem do conversor Buck
Modelo de regime permanente
+
Ii
1 D
1:
+
Ic
Vi
−
Vap = Vi
+
Vap
−
Vcp = D ⋅ Vap = D ⋅Vi
+
Vcp
−
Vab = Vcp = D ⋅ Vi
Vab
−
Ii
Io =
D
Modelagem do conversor Buck
Modelo de pequenos sinais para determinar G(s):
i i
+
v i = 0
v ap = v = Vap ⋅ d
eq
D
+
− veq +
ieq
−
Vap = Vi
i c
1 D
1:
v ap = Vi ⋅ d
D
+
v ap
−
+
v cp
−
v ab
−
V
v cp = D ⋅ v ap = D ⋅ i ⋅ d = Vi ⋅ d
D
v ab = v cp = Vi ⋅ d
Modelagem do conversor Buck
Modelo de pequenos sinais para determinar G(s):
i i
i c
1 D
1:
+
v i = 0
−
v ab = v cpp = Vi ⋅ d
+
− veq +
ieq
+
v ap
−
+
v cp
−
v ab
−
v ab
= Vi
G1 ( s ) =
d
Note que ii não interfere em G(s).
Modelagem do conversor Buck
Modelo de pequenos sinais para determinar F(s):
+
v i
−
v cp = D ⋅ v ap = D ⋅ v i
v ab = v cp = D ⋅ v i
i i
1 D
1:
a
c
i c
+
v cp
−
+
ap
v
d = 0 −
p
+
v ab
−
v ab
F1 ( s ) =
=D
v i
Note que ii não interfere em F(s).
Modelagem do filtro de saída
+
vabb
−
ic
Lo
+ vLo −
iLo
iCo
Co
+
io
Ro
vo
−
Modelagem do filtro de saída
Modelo de regime permanente
I Lo = I c
+
+
Io
Vab
Co
−
Vo = Vab
Ro
Vo
−
Io =
Vo
Ro
I Lo = I o = I c =
Vo
Ro
Modelagem do filtro de saída
Modelo de pequenos sinais para determinar G(s):
+
i c
Lo
+ v Lo −
v ab
v Lo = s ⋅ Lo ⋅ i Lo
+
i Co
Co
i o
Ro
v o
−
−
v ab = v Lo + v o
i Lo
o
v
i o =
Ro
o
v
v ab = s ⋅ Lo ⋅ i Lo +
Ro
Modelagem do filtro de saída
Modelo de pequenos sinais para determinar G(s):
+
v ab
−
i Lo = i Co + i o
i Co = s ⋅ C ⋅ v o
o
i c
Lo
+ v Lo −
i Lo
i Co
Co
+
i o
Ro
v o
−
o
v
i Lo = s ⋅ C ⋅ v o +
o
Ro
o ⎞
⎛
v
v ab = s ⋅ Lo ⋅ ⎜ s ⋅ Co ⋅ v o + ⎟ + v o
⎜
⎟
R
o
⎝
⎠
Modelagem do filtro de saída
Modelo de pequenos sinais para determinar G(s):
+
v ab
−
i c
Lo
+ v Lo −
i Lo
i Co
Co
+
i o
Ro
v o
−
Ro
v o
G2 ( s ) =
=
v ab s 2 ⋅ Lo ⋅ Co ⋅ Ro + s ⋅ Lo + Ro
Modelagem do filtro de saída
Modelo de pequenos sinais para determinar F(s):
+
v ab
−
i c
Lo
+ v Lo −
i Lo
i Co
Co
+
i o
Ro
v o
−
Ro
v o
F2 ( s ) =
=
v ab s 2 ⋅ Lo ⋅ Co ⋅ Ro + s ⋅ Lo + Ro
Modelo completo do conversor
Função de transferência da tensão de saída pela razão cíclica G(s):
Filtro de saída
Conversor
+
vi
Lo
S1
+
+
D1
vab
Co
−
−
v abb
G1 ( s ) =
d
Ro
vo
−
v o
G2 ( s ) =
v ab
Modelo completo do conversor
Função de transferência da tensão de saída pela razão cíclica G(s):
+
vi
Lo
S1
+
+
D1
−
v ab
G ( s ) = G1 ( s ) ⋅ G2 ( s ) =
d
vab
−
Co
Ro
vo
−
Ro
v o v o
⋅
= = Vi ⋅ 2
v ab d
s ⋅ Lo ⋅ Co ⋅ Ro + s ⋅ Lo + Ro
Modelo completo do conversor
Função de transferência da tensão de saída pela razão cíclica G(s):
+
Lo
S1
+
+
vi
D1
vab
Co
−
−
G (s) =
Vi ⋅ Ro
s 2 ⋅ Lo ⋅ Co ⋅ Ro + s ⋅ Lo + Ro
Ro
vo
−
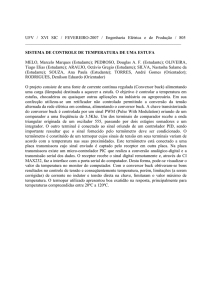
Modelo completo do conversor
Função de transferência da tensão de saída pela razão cíclica G(s):
Vi ⋅ Ro
G (s) = 2
s ⋅ Lo ⋅ Co ⋅ Ro + s ⋅ Lo + Ro
60
0
40
500
20
Gdb( ω )
Gfase( ω ) 100
0
150
20
40
1
10
100
1 .10
3
1 .10
4
1 .10
5
1 .10
6
200
0.1
1
10
1 .10
3
100
ω
ω
2⋅π
2⋅π
Diagrama de bode de módulo e fase.
1 .10
4
1 .10
5
1 .10
6
Modelo completo do conversor
Função de transferência da tensão de saída pela razão cíclica G(s):
Modelo completo do conversor
Função de transferência da tensão de saída pela tensão de entrada F(s):
Filtro de saída
Conversor
+
vi
Lo
S1
+
+
D1
vab
Co
−
−
v ab
F1 ( s ) =
vli
Ro
vo
−
v o
F2 ( s ) =
v ab
Modelo completo do conversor
Função de transferência da tensão de saída pela tensão de entrada F(s):
+
vi
Lo
S1
+
+
D1
−
v ab
F ( s ) = F1 ( s ) ⋅ F2 ( s ) =
v i
vab
−
Co
Ro
vo
−
Ro
v o v o
⋅
= = D⋅ 2
v ab v i
s ⋅ Lo ⋅ Co ⋅ Ro + s ⋅ Lo + Ro
Modelo completo do conversor
Função de transferência da tensão de saída pela tensão de entrada F(s):
+
Lo
S1
+
+
vi
D1
vab
Co
−
−
F (s) =
D ⋅ Ro
s 2 ⋅ Lo ⋅ Co ⋅ Ro + s ⋅ Lo + Ro
Ro
vo
−
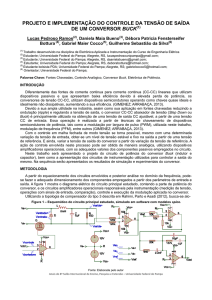
Modelo completo do conversor
Função de transferência da tensão de saída pela tensão de entrada F(s):
D ⋅ Ro
F (s) = 2
s ⋅ Lo ⋅ Co ⋅ Ro + s ⋅ Lo + Ro
0
0
20
50
Fdb( ω ) 40
Ffase( ω ) 100
60
150
80
1
10
100
1 .10
3
1 .10
4
1 .10
5
1 .10
6
200
0.1
1
10
1 .10
3
100
ω
ω
2⋅π
2⋅π
Diagrama de bode de módulo e fase.
1 .10
4
1 .10
5
1 .10
6
Modelo completo do conversor
Função de transferência da tensão de saída pela tensão de entrada F(s):
Verificação das funções de transferência
Função de transferência da tensão de saída pela razão cíclica G(s):
Vi ⋅ Ro
1000
G (s) = 2
= 2
s ⋅ Lo ⋅ Co ⋅ Ro + s ⋅ Lo + Ro s ⋅ 50 ⋅10−9 + s ⋅ 500 ⋅10−6 + 10
vi
100V
F (s)
1m
+
+
0,5
d
0
4m
G (s)
vo
Verificação das funções de transferência
Função de transferência da tensão de saída pela razão cíclica G(s):
Verificação das funções de transferência
Função de transferência da tensão de saída pela razão cíclica G(s):
Verificação das funções de transferência
Função de transferência da tensão de saída pela tensão de entrada F(s):
D ⋅ Ro
5
F (s) = 2
= 2
s ⋅ Lo ⋅ Co ⋅ Ro + s ⋅ Lo + Ro s ⋅ 50 ⋅10−9 + s ⋅ 500 ⋅10−6 + 10
vi
100V
00V
F (s)
1m
+
+
0,5
d
0
4m
G (s)
vo
Verificação das funções de transferência
Função de transferência da tensão de saída pela tensão de entrada F(s):
Verificação das funções de transferência
Função de transferência da tensão de saída pela tensão de entrada F(s):
Próxima aula
Capítulo 9: Choppers DC
1 Controle em malha fechada de conversores CC-CC.
1.
CC CC
www cefetsc edu br/~petry
www.cefetsc.edu.br/
petry