ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
1
Interações
e Campos
Introdução
A matéria ordinária é formada de partículas que possuem carga elétrica. Para os
objetivos desta obra essas partículas podem ser classificadas em dois tipos:
elétrons e núcleos atômicos. Os elétrons possuem uma carga negativa de valor
absoluto aproximado q o = 1.602 x 10 −19 Coulombs [C] e os núcleos atômicos
possuem carga positiva de valor Z qo , onde Z é o seu número atômico,
correspondendo exatamente ao seu número de prótons, que são as partículas
portadoras de carga positiva. O núcleo de hidrogênio, por exemplo, tem número
atômico unitário, porque possui apenas um próton e sua carga positiva é igual ao
módulo da carga de um elétron. Na maioria dos materiais conhecidos, os elétrons
estão associados a núcleos atômicos formando átomos neutros, ou seja, a carga
total dos elétrons ligados ao núcleo é igual em módulo à carga do núcleo. Toda
esta carga está confinada em volumes extremamente pequenos, pois os raios
atômicos são da ordem de décimos de nanômetros ( 1nm = 10 −9 m ). Os núcleos
atômicos isolados são muito menores, com raios da ordem de 10 −14 m e os
elétrons isolados são praticamente estruturas pontuais. Em virtude dessas
dimensões ínfimas em relação ao mundo macroscópico, uma aproximação
geralmente considerada válida no estudo da teoria eletromagnética é o modelo da
carga pontual. Uma carga pontual ocupa uma posição exata no espaço, pois suas
dimensões são nulas em qualquer direção que se considere. É claro que este
conceito somente se aplica nos casos em que as distâncias entre as partículas
sejam muito maiores que as suas próprias dimensões, mas mesmo para elétrons
1
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
em torno do núcleo em um átomo, a aproximação da carga pontual fornece
resultados geralmente adequados para as forças de interação entre essas
partículas. Entretanto, existem estruturas maiores e mais complexas envolvendo
elétrons e núcleos atômicos. Um átomo que perde ou ganha elétrons extras tornase um íon positivo ou negativo. Uma molécula formada pela agregação de vários
átomos também pode estar ionizada. Em ambos os casos, se as distâncias
envolvidas forem muito maiores que as dimensões do agregado molecular, esta
estrutura pode ser considerada como uma partícula de carga pontual.
A carga elétrica é uma propriedade das partículas assim como a massa. Porém, a
carga elétrica é quantizada, ou seja, não pode assumir qualquer valor, mas
apenas quantidades múltiplas da carga fundamental qo = 1.602 x 10 −19 C são
encontradas na natureza. O significado disso fica óbvio quando entendemos que a
matéria é formada de elétrons e núcleos atômicos. As cargas interagem entre si
por meio das forças elétrica e magnética. Este capítulo trata da descrição dessas
forças, dos campos associados a elas e do modo como podemos calcular a
distribuição espacial dessas entidades físicas para um sistema eletromagnético
conhecido.
Força elétrica e campo elétrico
Partículas de mesma carga se repelem e partículas com cargas diferentes se
atraem. A lei de força para a interação elétrica foi desenvolvida em 1785 a partir
de experimentos realizados por Coulomb. Ela é aplicável a partículas cuja
aproximação de carga pontual seja válida. A lei de Coulomb estabelece que a
força elétrica entre duas partículas carregadas depende de suas cargas e varia
com o inverso do quadrado da distância que as separa, estando sempre orientada
ao longo da reta que une as partículas. Em termos algébricos, a lei de Coulomb é
geralmente escrita na forma:
(1.1)
r
fe =
1 q1 q2 )
u
4πεo d2
2
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
onde q1 e q2 são as cargas das partículas, ‘d’ é a distância que as separa no
vácuo e a constante 1
4πε o
foi incluída para compatibilizar as unidades envolvidas.
ε o é denominada de permissividade elétrica do vácuo. Com a carga medida em
Coulomb (C), força medida em Newton (N) e distância medida em Metros (m) no
sistema internacional, ε o tem o valor aproximado de 8.854 x10 −12 C2/Nm2 ou F/m
)
(a unidade Faraday [F] equivale a C2/Nm). Em (1.1), o vetor unitário u indica a
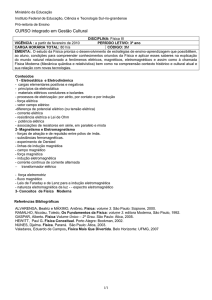
direção e sentido da força elétrica aplicada. A Figura 1.1 mostra os detalhes
geométricos envolvidos na lei de Coulomb. A força exercida sobre q2 tem mesmo
módulo e direção, porém sentido contrário à força exercida sobre q1 . Se as
r
r
posições de q1 e q2 são identificadas pelos vetores r1 e r2 , então as expressões
gerais dessas forças são (ver Apêndice 1.1 a respeito da notação vetorial e
sistemas de coordenadas espaciais):
(1.2)
r
fe21 =
q1 q2 r r
1
(r2 − r1 )
r
4πεo r − rr 3
2
1
(1.3)
r
fe12 =
q1 q2 r r
1
(r1 − r2 )
r
4πεo r − rr 3
1 2
Observe que se as cargas são de mesmo sinal, os vetores de força em cada
partícula corretamente apontam no sentido do afastamento das cargas e se as
cargas são de sinais contrários, os vetores de força apontam no sentido da
aproximação
das
cargas.
Quando
existem
várias
partículas
carregadas
interagindo, é possível obter a força elétrica total sobre cada uma, simplesmente
somando vetorialmente as forças calculadas pela lei de Coulomb para cada par de
partículas. Isto é, se existem ‘n’ cargas pontuais nas posições descritas pelos
r
vetores de posição rj (com j variando entre 1 e n), então a força sobre a partícula
‘i’ (qualquer valor entre 1 e n) neste conjunto é dada por:
(1.4)
r
fe i =
(
1 n qi q j r r
ri − rj
∑
4πεo j =1 rr − rr 3
j
j≠i i
)
3
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
r −r
r2 r1
r
f12
O
q2
q1
r
r1
x
r
f 21
r
r2
z
y
Figura 1.1 – Duas partículas carregadas em posições fixas no espaço e as forças de interação
elétrica.
Em certas situações práticas envolvendo grandes volumes de matéria contendo
quantidades imensas de partículas carregadas, é impossível considerar a soma
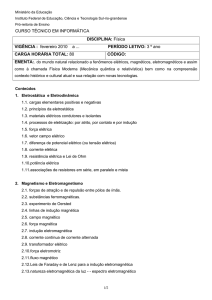
(1.4) entre todos os pares de cargas. A Figura 1.2 mostra um exemplo no qual
uma carga de teste é colocada próxima a um volume contendo muitas outras
partículas carregadas distribuídas de uma maneira específica. Se a densidade de
partículas nesse volume é muito alta, podemos abandonar a idéia de carga
pontual e pensar na carga como estando distribuída continuamente no volume (de
acordo com o conceito de carga pontual, a carga estaria altamente concentrada
em posições discretas dentro do volume) e representar uma carga diferencial (dq)
em cada pequeno elemento diferencial de volume (dV), na forma:
r
r
dq( r ′) = ρ( r ′) dV
(1.5)
4
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
V′
dV′
r
ρ( r ′)
r
r′
x
O
r
fe
r r
r − r′
q
r
r
z
y
Figura 1.2 – Uma partícula carregada próxima a um volume contendo uma carga distribuída.
r
onde ρ( r ′) (em C/m3 ) é a densidade volumétrica de carga na posição identificada
r
pelo vetor r ′ . Assim, podemos substituir o somatório em (1.4) por uma integral de
volume:
(1.6)
r r
fe ( r ) =
r r
(r − r ′) ρ( rr ′) dV ′
q
∫∫∫
4πε o V ′ rr − rr ′ 3
Evidentemente, essa abordagem falha se o volume diferencial conter poucas
partículas ou se a carga de teste estiver muito próxima das cargas no volume. Em
algumas situações particulares a geometria e natureza do corpo que contém a
distribuição de carga permite alguma simplificação no cálculo (1.6) pela
transformação da integral de volume em uma integral de superfície ou de linha. Se
a carga está distribuída em um corpo delgado tal como uma lâmina fina, ou
mesmo se o corpo for condutor e, por isso, a carga tende a se concentrar na sua
superfície, será mais adequado e geralmente mais simples representar a
r
distribuição de carga por uma densidade superficial σ( r ′) ( em C/m2 ) e escrever a
força elétrica na carga de teste na forma:
5
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
(1.7)
r r
fe ( r ) =
r r
(r − r ′) σ( rr ′) dS′
q
∫∫
4πεo S ′ rr − rr ′ 3
Analogamente, se a carga estiver distribuída em uma estrutura longa e de
pequena área transversal, tal como um fio metálico, podemos representar essa
r
distribuição por uma densidade linear de carga λ( r ′) ( em C/m ) e reescrever (1.6)
na forma:
(1.8)
r r
fe ( r ) =
r r
(r − r ′) λ( rr ′) dL′
q
∫
4πε o L ′ rr − rr ′ 3
A Figura 1.3 mostra três exemplos clássicos de distribuição de carga: no caso (a)
a carga se distribui no volume de uma esfera, no caso (b) a carga está na
superfície de um plano e em (c) a carga se distribui ao longo de um fio reto.
dV′
x
φ
s
V′
r − r′
r r
r′
r
θ
r
r
y
r
fe
z q
ρ
Figura 1.3a – Cálculo da Força produzida pela carga distribuída no volume de uma esfera.
6
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
dS = s ds dφ
σ
r − r′
r r
r′
r
dφ
r
r
s
z
q
ds
Figura 1.3b – Cálculo da Força produzida pela carga distribuída em uma superfície plana.
λ
dz z
r
r′
o
r
r
r r
r − r′
s
q
Figura 1.3c – Cálculo da Força produzida pela carga distribuída em um fio reto.
7
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
Exemplo 1.1 – Na Figura 1.3a uma carga pontual está situada próxima a um
volume esférico carregado. Supomos que a carga está distribuída uniformemente
no volume. Os termos da equação (1.6) para esta geometria, de acordo com a
simbologia usada nessa figura, são:
r
)
r = zz
(Ex.1)
r
)
)
)
r ′ = s senθ cos φ x +s senθ senφ y + s cos θ z
(Ex.2)
dV = s 2 senθ ds dθ dφ
r r
)
)
)
r − r ′ = −s senθ cos φ x −s senθ senφ y + (z − s cos θ) z
(Ex.3)
(Ex.4)
r r
r − r ′ = s 2 sen 2 θ cos 2 φ + s 2 sen 2 θ sen 2 φ + (z − s cos θ) 2
(Ex.5)
= z 2 + s 2 − 2 z s cos θ
r r
Era de se esperar que a distância r − r ′ não dependesse do ângulo azimutal
devido a simetria de revolução em relação ao eixo z.
Levando essas expressões em (1.6), teremos:
r
π
qρ R 2
senθ dθ
fe =
∫ s ds ∫
3
4 πε o 0
0
z 2 + s 2 − 2 z s cos θ 2
(Ex.6)
2π
2π
2π
)
)
)⎤
⎡
(
)
−
s
sen
θ
cos
φ
d
φ
x
−
s
sen
θ
sen
φ
d
φ
y
+
z
−
s
cos
θ
d
φ
z
∫
∫
∫
⎢⎣
⎥⎦
0
0
0
(
)
As duas primeiras integrais na variável φ são nulas e a terceira é igual a 2 π . A
expressão da força pode então ser rescrita na forma:
r
π
(z − s cos θ) senθ dθ z)
qρ R 2
(Ex.7) fe =
∫ s ds ∫
3
2ε o 0
0
z 2 + s 2 − 2 z s cos θ 2
(
)
A integral na variável θ pode ser separada em duas para facilitar a integração:
π
∫
0
(Ex.8)
(z − s cos θ) senθ dθ
(z
2
+ s 2 − 2 z s cos θ
)
3
senθ dθ
π
=z∫
2
0
(z
0
(z
2
)
2
+ s 2 − 2 z s cos θ
cos θ senθ dθ
2
+ s 2 − 2 z s cos θ
π
−s∫
)
2
3
3
A primeira é facilmente integrável porque é simples escrever o diferencial total da
(
)
função z 2 + s 2 − 2 zs cos θ no numerador do integrando. Assim, temos:
8
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
senθ dθ
π
z∫
0
(Ex.9)
(z
2
+ s 2 − 2 z s cos θ
)
3
2 s z senθ dθ
1 π
∫
2 s 0 z 2 + s 2 − 2 z s cos θ
=
(
2
)
3
2
π
⎡
⎤
1⎢
1
2
⎥ =
=
2
⎥
s⎢ 2 2
z − s2
z
+
s
−
2
z
s
cos
θ
⎣⎢
⎦⎥0
A segunda integral pode ser resolvida com a seguinte substituição de variáveis:
u 2 = 2 s z cos θ . Com esta substituição, a integral indefinida assume a forma:
(Ex.10)
−s ∫
(z
cos θ senθ dθ
2
+ s 2 − 2 z s cos θ
)
3
2
u 3 du
1
=
∫
2 s z2 z2 + s2 − u2
(
)
3
2
cuja primitiva pode ser obtida em uma tabela de integrais e tem a forma:
(Ex.11)
u 3 du
1
∫
2 s z2 z2 + s2 − u 2
(
)
3
=
2
1 ⎡ 2
2
2
⎢ z +s −u +
2 s z2 ⎣
⎤
⎥
z2 + s2 − u 2 ⎦
z2 + s2
Substituindo u 2 = 2 s z cos θ e os limites de integração em (Ex.11), obtemos:
cos θ senθ dθ
π
−s∫
0
(z
2
+ s 2 − 2 zs cos θ
)
3
2
π
(Ex.12)
⎡
⎤
1 ⎢ 2 2
z2 +s2
⎥
z + s − 2 s z cos θ +
=
2 ⎢
⎥
2sz
z 2 + s 2 − 2 s z cos θ ⎦⎥0
⎣⎢
− 2 s2
= 2 2
z ( z − s2 )
Levando esses dois resultados, (Ex.9) e (Ex.12), em (Ex.8), obtemos o resultado
da integração no ângulo polar:
π
(Ex.13)
∫
0
(z − s cos θ) senθ dθ
(z
2
+ s 2 − 2 zs cos θ
)
3
=
2
2s2
2
2
−
= 2
2
2
2
2
2
z −s
z (z − s ) z
Com isso, a expressão da força resulta na forma:
(Ex.14)
r
qρ R 2
q ρR 3 )
=
fe =
s
ds
z
∫
εo z 2 0
3εo z 2
Esta expressão pode ser reescrita em uma forma mais interessante ao introduzir o
volume total da esfera V =
4
πR 3 e verificar que, como a densidade de carga é
3
9
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
uniforme no volume da esfera, a carga total é dada por Q =
4
πR 3 ρ . Assim sendo,
3
a força sobre a partícula pode ser escrita na forma:
r r
qQ )
(Ex.15) fe ( r ) =
z
4 πε o z 2
Comparando com (1.1), concluímos que a carga na esfera se comporta como se
estivesse toda concentrada no seu centro. Um resultado análogo se obtém para
uma superfície esférica, como no caso de uma esfera metálica carregada, desde
que a aproximação da carga de teste não perturbe a distribuição uniforme de
carga na superfície. Obviamente o eixo z foi escolhido arbitrariamente e a direção
da força pode ser especifica mais genericamente como sendo a direção radial.
Exemplo 1.2 – Na Figura 1.3(b) uma carga pontual está localizada próxima a um
plano carregado com densidade de carga uniforme. Os termos da equação (1.7),
de acordo com essa figura são:
r
)
r = zz
(Ex.16)
r
)
r ′ = ss
(Ex.17)
r r
)
)
r − r ′ =z z − s s
(Ex.18)
(Ex.19)
r r
r − r ′ = s2 + z2
(Ex.20)
dS = s ds dφ
Levando isso em (1.7), teremos:
)
)
r
2 π (z z − s s )
qσ ∞
fe =
dφ
(Ex.21)
∫ s ds ∫
3
2
2 2
4 πε o 0
0
s +z
(
)
A integral no ângulo azimutal exige que se considere a variação do vetor unitário
)
s com esse ângulo. Então, temos:
)
)
)
2 π (z z − s s )
2π
2π )
s
zz
d
d
φ
=
φ
−
∫
∫
∫ s dφ
3
3
3
0
s2 + z2 2 0
s2 + z2 2 0
s2 + z2 2
(Ex.22)
)
2π z z
=
3
s2 + z2 2
(
(
)
(
)
(
)
)
10
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
2π )
Pois ∫ s dφ = 0
0
Retornando à equação da força, temos:
(Ex.23)
r
s ds
qσ ) ∞
fe =
zz ∫
2ε o
0
s2 + z2
(
)
3
2
∞
⎡
qσ ) ⎢
1
=−
zz
⎢ 2 2
2ε o
⎣⎢ s + z
⎤
⎥ = qσ z)
⎥
2εo
⎦⎥0
Concluímos que um plano infinito carregado aplica na carga de teste uma força
perpendicular ao plano e independente da posição.
Exemplo 1.3 – A Figura 1.3(c) mostra uma carga próxima a um fio reto de
comprimento infinito e carregado com densidade uniforme. Os termos da equação
(1.8) para este caso são:
r
)
r = ss
(Ex.24)
r
)
r′ = zz
(Ex.25)
r r
)
)
r − r ′ = ss − z z
(Ex.26)
(Ex.27)
r r
r − r ′ = s2 + z2
(Ex.28)
dL = dz
Levando isso em (1.8), teremos:
(Ex.29)
)
)
r
q λ + ∞ (ss − z z ) dz
qλ
=
fe =
∫
3
4 πε o −∞ s 2 + z 2 2
4 πε o
(
)
⎡ ) +∞
dz
⎢s s ∫
⎢ −∞ s 2 + z 2
⎣
(
)
3
) +∞
−z∫
2
−∞
⎤
⎥
3
2
2 2 ⎥
s +z
⎦
(
z dz
)
Mas, o segundo integrando é uma função impar de y e, portanto, a integral em um
intervalo simétrico em relação à origem é nula. Já o primeiro integrando é uma
função par e a integral no intervalo simétrico é o dobro da integral na metade do
intervalo. Assim, podemos calcular essa integral na forma:
+∞
(Ex.30)
∫
−∞
(s
dz
2
+z
2
+∞
)
3
2
=2∫
0
(s
dz
2
+ z2
)
3
2
⎡
z
=2⎢
⎢ s 2 z2 +s 2
⎣
∞
⎤
2
⎥ = 2
s
⎥
⎦0
Levando esse resultado na equação da força, obtemos:
r
qλ )
s
(Ex.31) fe =
2 πε o s
11
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
Concluímos
que
no
caso
do
fio
infinito,
a
força
está
direcionada
perpendicularmente ao fio e diminui de intensidade com o inverso de distância da
carga ao fio.
Em todas as expressões de força anteriores (equações 1.6, 1.7 e 1.8) a força
elétrica sobre uma carga de teste é proporcional a própria carga. Se não
conhecemos a distribuição de carga que gera a força, mas temos um modo de
medir essa força em qualquer posição do espaço onde colocarmos a carga de
teste, podemos imaginá-la como sendo o resultado do produto da carga de teste
por uma grandeza vetorial característica do espaço. Esta grandeza é denominada
de campo elétrico. Assim, podemos escrever a força elétrica de maneira
completamente geral na forma:
r r
r r
fe ( r ) = q e( r )
(1.9)
r r
O campo elétrico e( r ) especifica a força por unidade de carga elétrica que é
r
aplicada em qualquer carga colocada na posição r . A princípio, a carga de teste
r
deve ser pontual para que a posição r possa ser especificada univocamente e
deve ser suficientemente pequena para não perturbar a distribuição de carga que
criou o campo. Baseados nas expressões da força sobre uma carga pontual dadas
acima, obtemos as seguintes expressões do campo elétrico:
r
A) Campo de uma carga pontual q na posição r ′ :
(1.10)
r r
e( r ) =
r r
1
q
(
− r ′)
r
4πε o rr − rr ′ 3
1
r
B) Campo de um conjunto discreto de n cargas pontuais nas posições rj ( j
variando de 1 a n)
(1.11)
r r
e( r ) =
(
qj
r r
1 n
∑ r r 3 r − rj
4πε o j =1 r − r
j
)
C) Campo de uma distribuição contínua de carga com densidade volumétrica
r
ρ( r ′) :
12
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
(1.12)
r r
e( r ) =
r r
(r − r ′) ρ( rr ′) dV ′
1
∫∫∫
4πεo V ′ rr − rr ′ 3
r
D) Campo de uma distribuição contínua de carga com densidade superficial σ( r ′) :
r r
r r
(
1
r − r ′) r
e( r ) =
σ( r ′) dS′
(1.13)
∫∫
4πεo S ′ rr − rr ′ 3
r
D) Campo de uma distribuição contínua de carga com densidade linear λ( r ′) :
r r
r r
(
1
r − r ′) r
e( r ) =
λ( r ′) dL ′
(1.14)
∫
4πεo L ′ rr − rr ′ 3
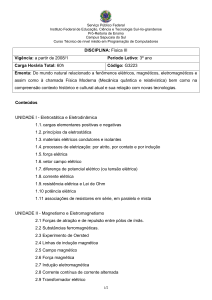
A Figura 1.4 mostra a distribuição dos vetores de campo elétrico em torno de
algumas estruturas carregadas. Baseados nos resultados obtidos nos exemplos
1.1 a 1.3, podemos escrever as seguintes expressões para o campo elétrico
criado por aquelas distribuições de carga:
A) Campo elétrico no exterior de uma esfera uniformemente carregada com carga
total Q e centrada na origem do sistema de coordenadas:
(1.15)
r
e=
Q
4πε o r 2
)
r
Onde r é a coordenada radial do ponto no espaço. Esta expressão mostra que,
para uma posição fora da esfera, o campo criado pela carga uniformemente
distribuída é igual ao campo de uma carga pontual localizada no centro da esfera.
B) Campo elétrico de uma superfície plana infinita carregada uniformemente:
(1.16)
r
σ )
e=
z
2ε o
onde z é a distância perpendicular ao plano. O campo criado pelo plano infinito é
uniforme e perpendicular à superfície.
C) Campo elétrico de um fio reto de comprimento infinito uniformemente
carregado:
(1.17)
r
e=
λ )
s
2πε o s
13
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
+
(a)
_
(b)
+
+
+
+
+
+
+
+
+
+
+
(c)
14
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
(d)
Figura 1.4 – Distribuição de campo elétrico criado por: (a) e (b) cargas isoladas; (c) linha reta de
cargas; (d) duas cargas próximas; As setas indicam apenas a orientação espacial do campo.
onde s é a distância perpendicular ao fio. O campo criado pelo fio infinito depende
apenas da distância ao fio e tem direção perpendicular a ele. As equações (1.16) e
(1.17) não podem ser aplicadas em estruturas finitas como uma placa plana ou um
pedaço de fio, mas podem ser boas aproximações para o campo nas
proximidades da placa e do fio e longe das bordas e extremidades.
É evidente da definição de campo elétrico dada em (1.9) que a unidade de medida
de campo elétrico é Newton por Coulomb [N/C]. Mas campo elétrico também pode
ser especificado na unidade de potencial elétrico por unidade de comprimento
(Volt por metro [V/m]). Isto será discutido No Capítulo 3.
Força magnética e campo magnético
A força elétrica não é a única forma de interação entre cargas elétricas. Os
experimentos de Ampere em 1820 mostraram que condutores transportando
corrente elétrica se atraem ou se repelem dependendo da intensidade e sentido
dessas correntes. A lei experimental deduzida por Ampere pode ser assim descrita
na forma algébrica (ver Figura 1.5):
15
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
(1.18)
[
(
r
r
r )
μ ii
d fm21 = o 1 2 dL 2 × dL1 × u
4π d2
i1
)]
i2
r
dL1
)
u
d
r
dL2
Figura 1.5 – Descrição da interação entre duas correntes de acordo com os experimentos de
Ampere.
r
Esta é a expressão da força sobre o segmento dL 2 do condutor que transporta a
r
corrente i2 devido a interação com a corrente i1 no segmento dL1 . Esses
segmentos diferenciais são orientados na direção e sentido das respectivas
correntes.
μo
4π
é uma constante usada para compatibilizar as unidades das
grandezas envolvidas. A constante μo é denominada de permeabilidade
magnética do vácuo e no sistema internacional de unidades tem o valor 4π x10 −7
Ns2/C2 ou H/m (s é segundos e a unidade Henry [H] equivale a Ns2m/C2 ).
A corrente elétrica em um condutor é a taxa de transporte de carga através da
área da seção transversal do condutor. A Figura 1.6 mostra esquematicamente a
distribuição de corrente na seção transversal de um condutor cilíndrico. Se o
condutor é bastante delgado e a corrente não varia no tempo ou varia lentamente,
podemos assumir que a distribuição de corrente é uniforme na sua seção
transversal (Figura 1.6a). A corrente será então escrita na forma:
(1.19)
i=
dq
dt
16
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
(a)
(b)
(c)
ρ
r
v
r
r
j = ρv
Figura 1.6 – Distribuição de corrente em na seção transversal de um fio condutor: (a) densidade de
corrente uniforme; (b) densidade de corrente não uniforme; (c) ilustração do fluxo de corrente;
onde dq é a carga total que atravessa a área do condutor no intervalo de tempo dt.
A unidade de medida de corrente elétrica é o Coulomb por segundo [C/s] que é
chamada de Ampere [A]. Se as partículas que atravessam a seção transversal se
distribuem de maneira não uniforme nessa área (Figura 1.6b), a corrente total
ainda é dada por (1.19), mas agora a distribuição de corrente deve ser
especificada por sua densidade. A densidade de corrente é um campo vetorial que
indica em cada ponto do espaço qual é a corrente por unidade de área que
atravessa uma área transversal. Se a corrente que atravessa uma superfície ‘S’ se
r r
distribui com densidade j ( r ) , a corrente total pode ser escrita na forma:
17
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
(1.20)
r r
i = ∫∫ j ⋅ dS
S
A densidade de corrente é medida em Ampere por metro quadrado [A/m2]. Uma
expressão simples e muito importante para a densidade de corrente se obtém
considerando como mostra a Figura 1.6c que, se as partículas carregadas em
r
movimento têm densidade volumétrica ρ e velocidade média v , então no intervalo
de tempo dt, toda a carga contida no volume v dt dA atravessa a área dA, e
portanto, a densidade de corrente pode ser expressa por:
r di )
r
dq ) ρv dt dA )
(1.21)
j=
v=
v=
v = ρv
dA
dA dt
dA dt
Podemos obter a força total sobre o condutor 2 na Figura 1.5 por meio de duas
integrações sucessivas, primeiro ao longo do fio 1 e depois ao longo do fio 2. A
partir de equação (1.18) obtemos:
(1.22)
r )
⎞
r
r ⎛ μo
d
L
1×u⎟
fm21 = i2 ∫ dL 2 × ⎜
i1 ∫
2 ⎟
⎜ 4π L
L2
1 d
⎝
⎠
O termo entre parênteses nesta fórmula pode ser interpretado como uma
propriedade do espaço, pois não depende da existência da corrente i2. Este termo
que depende apenas da corrente i1 e da geometria do condutor 1, é definido como
um campo vetorial denominado de indução magnética. A expressão que define a
indução magnética produzida por uma corrente filamentar é denominada de lei de
Biot-Savart, e pode ser escrita na forma:
r
r r μ o dL ′ × ( rr − rr ′)
(1.23) b( r ) =
i∫
4π L ′ rr − rr ′ 3
r
r
Onde r ′ é o vetor de posição do elemento diferencial dL ′ . Por esta fórmula
r
podemos conceituar que cada elemento de corrente i dL contribui com uma
r
indução magnética diferencial db no espaço de acordo com a expressão:
r r μ o r ( rr − rr ′)
db( r ) =
i dL ′ × r r
(1.24)
3
4π
r − r′
18
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
A partir de (1.22) podemos concluir também que a força magnética sobre um
condutor transportando corrente pode ser escrita como a resultante da interação
r
de cada elemento de corrente i dL com a indução magnética na sua posição do
espaço, ou seja:
r
r r
fm = ∫ i dL × b
(1.25)
L
Tanto a expressão da força quanto a expressão da indução magnética podem ser
escritas em uma forma mais geral aplicável a qualquer distribuição espacial de
r r
corrente. Dado um volume elementar descrito por dV = dL ⋅ dS , se a corrente i
r
r
atravessa a área dS na direção e sentido de dL , então podemos escrever a
seguinte relação:
r r r r r r r r
(1.26)
i dL = j ⋅ dS dL = j dL ⋅ dS = j dV
r
Fazendo a substituição de i dL nas equações (1.23) e (1.25), obtemos:
r r r
r r
μo
j × ( r − r ′)
(1.27) b( r ) =
∫∫∫ r r 3 dV ′
4π V ′ r − r ′
r
r r
fm = ∫∫∫ j × b dV
(1.28)
(
)
(
)
V
Uma terceira forma usada para o cálculo da indução magnética é especialmente
útil no caso de uma corrente fortemente concentrada em uma pequena espessura
de um condutor de grande área. Isso acontece, por exemplo, se o condutor for
uma chapa fina ou no caso de corrente alternada em bons condutores, que tende
a se concentrar na superfície e não no volume do condutor. Isto é mostrado na
Figura 1.7. A corrente se concentra em uma profundidade Δz a partir da
r r
superfície. Se r − r ′ em (1.27) é muito maior que Δz , podemos considerar a
densidade de corrente uniforme até esta profundidade. Assim, temos:
r
r
r
(1.29)
j dV = j Δz dS = k dS
r r
onde k = j Δz é uma densidade linear de corrente (em [A/m] ). A expressão da
indução magnética neste caso é:
19
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
(1.30)
r
r r μ o k × ( rr − rr ′)
b( r ) =
dS
∫∫
4π S rr − rr ′ 3
(x, y, z)
r
k
r r
r − r′
r
r
x
dS
r
r′
z
y
Figura 1.7 – Elementos para cálculo da indução magnética de uma distribuição superficial de
corrente.
Naturalmente, a força exercida pelo campo sobre uma corrente superficial em um
r
condutor, também pode ser escrita em uma forma alternativa usando o vetor k :
r
r r
(1.31)
fm = ∫∫ k × b dS
S
Exemplo 1.4 – Força magnética entre duas correntes em fios condutores
paralelos. De acordo com a Figura 1.8 temos os seguintes termos da equação da
força (1.22):
(Ex.32)
r
r
)
dL1 = dL2 = dy y
20
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
(Ex.33)
)
)
) ( y 2 − y1 ) y + z z
u=
( y 2 − y1 )2 + z 2
(Ex.34)
d = ( y 2 − y 1 )2 + z 2
Levando isso na equação (1.22), teremos para a força no fio 2:
)
)
)
⎞
r μ
) ⎛ y × [( y 2 − y 1 ) y + z z ]
⎟
fm = o i1 i 2 ∫ dy 2 y × ⎜ ∫
dy
1⎟
3
⎜
2
2
4π
2
L2
L
⎝ 1 ( y 2 − y1 ) + z
⎠
) )
Sabendo que y × y = 0 podemos reescrever a integral entre colchetes na forma:
)
)
)
y × [( y 2 − y 1 ) y + z z ]
) )
dy 1
dy 1 = z ( y × z ) ∫
(Ex.36)
∫
3
3
L1
L1
( y 2 − y1 )2 + z 2 2
( y 2 − y 1 )2 + z 2 2
(Ex.35)
(
(
)
)
(
)
Substituindo y = y 2 − y 1 e considerando que os fios estão centralizados, podemos
escrever (Ex.36) na forma:
L1
(Ex.37)
) ) 2
z (y ×z) ∫
−
L1
(( y
2
L1
) ) y2 +
= z (y ×z) ∫
dy 1
− y1 )2 + z 2 )
3
2
2
y2 −
L1
dy
2
2
(y
2
+ z2)
3
2
Para simplificar um pouco, vamos supor que L1 >> L2 e L1 >> z e obter um valor
aproximado desta integral:
L1
) ) y2 +
z (y ×z) ∫
y2 −
L1
dy
2
2
(y
+ z2
2
L1
) ) 2
≅ z (y ×z) ∫
)
3
2
−
(Ex.38)
L1
) ) 2
= 2z ( y × z ) ∫
0
(y
dy
2
+ z2
)
3
2
L1
2
(y
dy
2
+z2
)
3
2
⎡
) ) ⎢
y
= 2z ( y × z )
⎢ 2
y 2 +z 2
⎢⎣ z
L1
⎤ 2
⎥ ≅ 2 ( y) × z) )
⎥
z
⎥⎦0
Retornando a expressão da força (Ex.35), obtemos:
(Ex.39)
L2
r
2
μo
μ
) ) )
)
fm =
i1 i 2 ∫ dy 2 y × ( y × z ) = − o i1 i 2 L2 z
L
2π z
2π z
− 2
2
) ) )
)
Onde vemos que y × ( y × z ) = −z . Concluímos que a força é de atração se as
correntes estão no mesmo sentido, mas decresce com o aumento da distância
entre os fios.
21
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
i1
r
)
d L1= dy y
r
)
d L 2 = dy y
)
u
d = (y2 − y1)2 + z2
y1
o
y2
z
L1
i2
L2
Figura 1.8 – Elementos para cálculo da força magnética entre dois fios retos paralelos.
Exemplo 1.5 – Indução magnética de uma corrente retilínea filamentar. Em
qualquer plano que contém o fio reto definimos um sistema de coordenadas como
mostrado na Figura 1.9. Os termos da equação (1.23) para essa geometria são:
r
)
)
r = ss + zz
(Ex.40)
r
)
r ′ = z′ z
(Ex.41)
r r
)
)
r − r ′ = (z − z ′) z + s s
(Ex.42)
(Ex.43)
(Ex.44)
r r
2
r − r ′ = (z − z ′) + s 2
r
)
dL = dz ′ z
Com isso em (1.23), temos:
r μ o dz ′ z) × [(z − z ′) z) + s s) ] μ o i ) L 2
dz ′
(Ex.45)
b=
i∫
sφ ∫
=
3
3
2
−L
2 2
4π L
4π
2 (z − z ′ ) + s
(z − z ′)2 + s 2 2
) ) )
Onde usamos z × s = φ , o vetor unitário na direção azimutal. Fazendo a mudança
[
]
[
]
de variável u = z − z ′ , podemos resolver a integral, obtendo:
22
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
L
2
∫
(Ex.46)
−L
2
z +L
dz ′
[(z − z′) + s ]
2
2
3
= ∫
z −L
2
du
2
2
[u
2
+ s2
]
3
2
⎡
u
=⎢
⎢ s 2 u 2 +s2
⎣
z +L
⎤ 2
⎥
⎥
⎦ z −L 2
O resultado então depende do comprimento L do fio. Como um exemplo útil,
vamos supor que estamos considerando apenas posições próximas ao meio de
um fio muito longo. Assim, podemos dizer que L >> z e L >> s . Com isso,
obtemos de (Ex.46) e (Ex.45), o seguinte resultado aproximado para a indução
magnética:
(Ex.47)
r μ i )⎡
u
b ≅ o s φ⎢
4π
⎢s 2 u 2 +s2
⎣
∞
⎤
μ i )
⎥ = o φ
2πs
⎥
⎦ −∞
A Figura 1.10 mostra a distribuição da indução magnética produzida pelo fio reto.
i
r
)
dL = dz′ z
)
u
d = (z − z′)2 + s2
z′
o
z
s
L
Figura 1.9 – Elementos para cálculo da indução magnética de uma corrente filamentar.
23
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
i
s
r
b
Figura 1.10 – Distribuição da indução magnética em torno da direção de uma corrente filamentar.
Exemplo 1.6 – Indução magnética de uma espira circular. Os detalhes
geométricos deste exemplo são mostrados na Figura 1.11. Para simplificar o
procedimento, vamos calcular a indução magnética apenas no plano xz,
reconhecendo em virtude da simetria axial da corrente, que a indução magnética
é invariante a rotações do sistema de coordenadas em torno do eixo z. Temos
então:
(Ex.48)
(Ex.49)
(Ex.50)
(Ex.51)
(Ex.52)
r
)
)
r = x x + zz
r
)
)
r ′ = a cos φ x + a senφ y
r r
)
)
)
r − r ′ = ( x − a cos φ ) x − a senφ y + z z
r r
r − r ′ = x 2 + z 2 + a 2 − 2 a x cos φ
r drr ′
)
)
dL =
dφ = ( − senφ x + cos φ y ) a dφ
dφ
levando essas expressões na equação (1.23), teremos:
r μ o i a 2 π ( − senφ x) + cos φ y) ) × [( x − a cos φ ) x) − a senφ y) + z z) ]
b=
dφ
(Ex.53)
∫
3
2
2
2
4π 0
2
x + z + a − 2 a x cos φ
[
]
24
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
Resolvendo o produto vetorial e separando nas componentes retangulares,
) ) ) ) ) )
) ) )
lembrando que x × y = z , y × z = x e z × x = y , obtemos:
(Ex.54)
bx =
μo i a z 2π
cos φ dφ
∫
4 π 0 x 2 + z 2 + a 2 − 2 a x cos φ 3 2
(Ex.55)
by =
μo i a z 2π
senφ dφ
=0
∫
4 π 0 x 2 + z 2 + a 2 − 2 a x cos φ 3 2
(Ex.56)
bz =
μo i a 2π
( a − x cos φ ) dφ
∫
4 π 0 x 2 + z 2 + a 2 − 2 a x cos φ 3 2
[
]
[
]
[
]
A componente y está na direção azimutal em relação à normal ao plano da espira.
Esta componente é nula em qualquer posição do espaço. Para obter as demais
componentes devemos resolver as integrais acima. Não há solução analítica para
uma posição qualquer do espaço. Então consideraremos o caso particular no qual
o ponto está sobre o eixo z. Neste caso, fazendo x = 0 , nas equações (Ex.54) e
(Ex.56), obtemos:
μ o i a z 2 π cos φ dφ
=0
∫
4π 0 z2 + a2 32
(Ex.57)
bx =
(Ex.58)
μ i a 2π
a dφ
bz = o
∫
4π 0 z2 + a2
[
[
]
]
3
=
2
[
μo i a2
2 z2 + a2
]
3
2
Vemos que sobre o eixo z a indução magnética da espira circular é paralela a
esse eixo e diminui com o aumento da distância. Para distâncias tais que z >> a ,
a indução diminui com z −3 . As equações (Ex.54) e (Ex.56) podem ser integradas
numericamente para obter a indução magnética em uma posição qualquer do
espaço (ver Apêndice 1.2 sobre o método de integração numérica). A Figura 1.12
r
mostra a distribuição obtida numericamente para o vetor b no espaço em torno da
espira. Note tanto na Figura 1.10 quanto na Figura 1.12 que as direções da
indução magnética no espaço formam percursos fechados. Esta é uma
característica dos campos chamados solenoidais. Os campos vetoriais solenoidais
são aqueles que tem divergência nula. Isso contrasta frontalmente com a
distribuição de campo elétrico mostrada na Figura 1.4. As direções do campo
elétrico convergem para as posições das cargas negativas e divergem nas
25
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
posições das cargas positivas. Pode-se mostrar que o divergente da indução
magnética de qualquer distribuição de corrente é nulo em qualquer posição do
espaço. De modo análogo pode-se mostrar também que o campo elétrico tem
divergente não nulo nas regiões do espaço onde existem cargas elétricas
acumuladas. Isto será mais bem analisado no Capítulo 2.
z
(x, z)
r
r
r
r − r′
r
r′
φ
a
r
)
dL = a dφ φ
y
x
Figura 1.11 – Elementos para cálculo da indução magnética de uma espira circular.
Figura 1.12 – Distribuição de indução magnética em torno de uma espira circular apenas em um
semiplano contendo o eixo da espira. As setas indicam apenas a direção do campo.
26
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
Considerações finais sobre o uso das leis de Coulomb e Biot-Savart
A princípio, nada é informado na formulação das leis de Coulomb e Biot-Savart a
respeito da forma como os campos se estabelecem a partir da fontes que variam
no tempo. As intensidades dos campos são proporcionais a quantidade de carga
ou intensidade da corrente, é o que se verifica em todos os exemplos obtidos. Isto
leva a crer que os campos têm exatamente a mesma forma de variação temporal
que as fontes. Isto não está completamente correto. A experimentação com fontes
variáveis no tempo mostra que os campos dependentes do tempo não seguem
exatamente as mesmas leis que os campos provenientes de fontes estáticas.
Principalmente, a experimentação mostra que correntes variáveis produzem não
apenas indução magnética variável, mas também campo elétrico. De modo
análogo, distribuições variáveis de carga produzem não apenas campo elétrico
variável, mas também indução magnética. Existe assim, uma reciprocidade ou
interação entre os campos elétrico e magnético gerados por fontes variáveis no
tempo, e isso leva a outros importantes fenômenos que serão estudados em
capítulos posteriores. Podemos concluir afirmando que as leis e resultados das
seções anteriores são totalmente válidos apenas para distribuições estáticas de
carga e corrente. Para fontes variáveis, os resultados obtidos anteriormente,
podem ser considerados boas aproximações apenas se as fontes não variam
muito rapidamente
com o tempo. A tabela a seguir resume os principais
resultados destas duas seções.
Tabela 1.1 – Resumo das relações de força e campo a partir de fontes estáticas
Força entre cargas pontuais
Campo elétrico de carga distribuída
em um volume
Campo elétrico de carga distribuída
em uma superfície
r
fe =
1 q1 q2 )
u
4πεo d2
r r
r r
(
1
r − r ′) r
e( r ) =
ρ( r ′) dV ′
∫∫∫
4πεo V ′ rr − rr ′ 3
r r
e( r ) =
r r
(r − r ′) σ( rr ′) dS′
1
∫∫
4πεo S ′ rr − rr ′ 3
27
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
Campo elétrico de carga distribuída
em uma linha
Força entre elementos diferenciais
de corrente
Indução
magnética
de
corrente
distribuída em um volume
Indução
magnética
de
corrente
magnética
de
corrente
superficial
Indução
filamentar
Força elétrica sobre uma partícula
Força magnética sobre uma
r r
e( r ) =
r r
(r − r ′) λ( rr ′) dL′
1
∫
4πεo L ′ rr − rr ′ 3
[
(
r
r
r )
μ ii
d fm21 = o 1 2 dL 2 × dL1 × u
4π d2
r r r
r r
μo
j × ( r − r ′)
b( r ) =
∫∫∫ r r 3 dV ′
4π V ′ r − r ′
)]
r
r r μ o k × ( rr − rr ′)
b( r ) =
dS
∫∫
4π S rr − rr ′ 3
r
r r μ o dL ′ × ( rr − rr ′)
b( r ) =
i∫
4π L ′ rr − rr ′ 3
r r
r r
fe ( r ) = q e( r )
r
r r
fm = ∫ i dL × b
L
Corrente filamentar
Dinâmica das partículas carregadas em campos
elétrico e magnético
Quando uma partícula carregada está sob a influência de campos elétrico e
magnético, ela experimenta forças que modificam o seu estado de movimento. A
força total que atua em uma partícula carregada pode ser obtida com a soma da
força elétrica dada em (1.9) com a força magnética dada por (1.28). Porém, A
equação (1.28) deve ser adaptada para o caso de uma única partícula em
movimento. Uma partícula pontual pode ser entendida como uma distribuição de
carga altamente concentrada em um volume infinitesimal em torno da posição da
partícula. Assim, a força magnética dada por (1.28) pode ser escrita na forma:
r
r r
r r
r r
fm = ∫∫∫ ρv × b dV = v × b ∫∫∫ ρ dV = qv × b
(1.32)
V
V
e a força total é escrita na forma:
r
r r r
(1.33)
f = q e + v ×b
(
)
28
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
Esta equação é denominada de força de Lorentz. Sob a ação dessa força total,
uma partícula carregada no vácuo deve obedecer a seguinte equação dinâmica
baseada na 2a lei de Newton :
r
dv q r r r
= e + v ×b
(1.34)
dt m
r
onde r é a posição da partícula no espaço e m é a sua massa, considerada
(
)
invariável durante o movimento. A energia transferida para a partícula numa
trajetória arbitrária L dentro do campo, pode ser calculada pela definição usual de
trabalho:
(1.35)
(
)
r r
r r r r
r r
r r r
W = ∫ f ⋅ dr = q ∫ e + v × b ⋅ dr = q ∫ e ⋅ dr + q ∫ v × b ⋅ dr
L
L
L
L
r
r
mas, como a velocidade ( v ) da partícula é sempre paralela ao deslocamento ( d r ),
r r r
o termo q ∫ v × b ⋅ d r é sempre nulo. Em outras palavras, a força magnética
L
r
r r
fm = q v × b é sempre perpendicular ao deslocamento da partícula e por isso a
força magnética não realiza trabalho sobre a partícula. Portanto, uma partícula em
um campo magnético pode ter a direção e sentido de seu movimento afetados
pelo campo, mas não sua energia cinética.
Veremos a seguir dois exemplos interessantes de movimento de partículas
carregadas em campos elétrico e magnético.
r
)
Exemplo 1.9 - Uma partícula com massa m e velocidade inicial v = v o z penetra
r
)
em uma região de campo elétrico uniforme e = eo x que se estende de z = 0 até
z = Z (ver Figura 1.13a). Calcularemos a velocidade final da partícula ao deixar
essa região. Neste caso, a integração da equação (1.34) fornece:
(Ex.59)
r
r
qe ) t
qe
)
)
v ( t ) = o x ∫ dτ + v ( 0 )= o t x + v o z
m 0
m
Esta equação mostra que o movimento é uniforme na direção z e acelerado na
direção x. Integramos esta equação para obter a posição da partícula a partir da
origem ( x , z ) = ( 0 ,0 ) :
29
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
(Ex.60)
r
qe ⎛ t
)
)
⎞ )
⎛ t ⎞ ) qe
r ( t ) = o ⎜ ∫ τ dτ ⎟ x + v o ⎜ ∫ d τ ⎟ z = o t 2 x + v o t z
m ⎝0
2m
⎠
⎝0 ⎠
vemos então que a partícula alcançará a extremidade posterior da região de
campo no intervalo de tempo:
(Ex.61)
Δt =
Z
vo
Neste instante, a posição x da partícula será:
(Ex.62)
2
qeo 2 q eo Z
X =
Δt =
2m
2 mv o2
E a velocidade da partícula será:
(Ex.63)
r
qe Z )
)
vs = o x + voz
mv o
Cujo módulo é:
(Ex.64)
⎛ qe Z
v s = ⎜⎜ o
⎝ mv o
2
⎞
⎟⎟ + v o2
⎠
e cuja direção faz um ângulo com o eixo z, dado por:
(Ex.65)
⎛v
θ = arctan⎜⎜ x
⎝vz
⎛ qe Z
⎞
⎟⎟ = arctan⎜⎜ o 2
⎠
⎝ mv o
⎞
⎟⎟
⎠
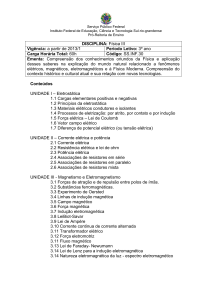
A Figura 1.13b mostra a trajetória da partícula sob a ação do campo. Concluímos
que um campo elétrico uniforme pode ser usado para defletir partículas em
movimento. O ajuste da intensidade de campo eo na equação (Ex.65) permite
obter diferentes deflexões da partícula. Este recurso é utilizado por exemplo, em
cinescópios, para
obter uma varredura controlada do feixe eletrônico na tela
fosforescente e assim criar uma imagem bidimensional associada a um
determinado sinal de entrada.
r
)
)
Exemplo 1.10 - Uma partícula com massa m e velocidade inicial v = v ox x + v oz z
r
)
penetra em uma região de campo magnético uniforme b = bo z . Vamos descrever
a trajetória desta partícula. A equação (1.34), neste caso, pode ser reescrita na
forma:
30
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
r
)
e = eo x
x
(a)
0
r
)
v = voz
z
8
7
(b)
X ( cm )
6
5
eo = 1 N/C
q = 1.602 x 10-19 C
m = 9.1x10-31 Kg
Vo = 104 m/s
4
3
2
1
0.2
0.4
0.6
0.8
1
Z ( cm )
Figura 1.13 – Descrição do movimento de uma partícula carregada em um campo elétrico
uniforme. Os resultados da figura b são para um elétron (embora a carga tenha sido considerada
positiva apenas por conveniência).
(Ex.66)
)
)
)
)
dv x ) dv y ) dv z ) q
y+
z = (v x x + v y y + v z z ) × bo z
x+
dt
dt
m
dt
) ) qb
) )
) qb
)
qb
qb
= o v x ( x × z ) + o v y (y × z ) = − o v x y + o v y x
m
m
m
m
31
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
Podemos separar esta equação nas três equações escalares:
(Ex.67)
(Ex.68)
(Ex.69)
dv x qbo
=
vy
dt
m
dv y
dt
=−
qbo
vx
m
dv z
=0
dt
Como vemos, o movimento na direção z ocorre com velocidade constante. Para
obter as velocidades nas direções x e y devemos resolver o sistema de equações
acopladas (Ex.67) e (Ex.68). A separação de variáveis é facilmente realizada,
resultando em:
(Ex.70)
(Ex.71)
d 2v x
= −ω2o v x
2
dt
d 2v y
dt 2
onde ωo =
= −ω2o v y
qbo
. As soluções gerais dessas equações são bem conhecidas e
m
podem ser escritas na forma geral:
(Ex.72)
v x = v mx cos( ωo t + θ x )
(Ex.73)
v y = v my cos( ωo t + θ y )
Onde v mx , v my , θ x , θ y são constantes que devem ser determinadas para que as
soluções particulares atendam às condições iniciais. Estas condições iniciais
podem ser expressas na forma:
v x ( t = 0 ) = v ox
vy (t = 0 ) = 0
(Ex.74)
dv x
( t = 0 ) = ωo v y ( t = 0 ) = 0
dt
dv y
( t = 0 ) = −ωo v x ( t = 0 ) = −ωo v ox
dt
32
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
Aplicando essas condições obtemos uma solução particular única na qual
v mx = v my = v ox , θ x = 0 e θ y = π . Assim, a velocidade da partícula segue a
2
seguinte equação:
r
)
)
)
(Ex.75) v = v ox cos( ωo t ) x − v ox sen( ωo t )y + v oz z
Esta equação nos informa que enquanto a partícula continua se deslocando na
direção z com sua velocidade paralela ao campo inalterada, no plano transversal
ao campo a velocidade da partícula realiza uma variação periódica como ocorre
em um oscilador harmônico. A trajetória da partícula pode ser obtida pela
integração desta equação a partir de uma posição inicial conhecida (xo, yo, zo):
(Ex.76)
t
t
t
r ⎡
⎤) ⎡
⎤) ⎡
⎤)
r = ⎢ x o + v ox ∫ cos( ωo τ )dτ⎥ x + ⎢ y o − v ox ∫ sen( ωo τ )dτ⎥ y + ⎢zo + v oz ∫ dτ⎥ z
0
0
0
⎣
⎦
⎣
⎦
⎣
⎦
Para simplificar a expressão, vamos considerar a posição inicial como sendo
xo = 0 , y o =
(Ex.77)
v ox
ωo
e zo = 0 . Com isso, (Ex.18) resulta em:
r v
)
)
)
r = ox [sen(ωo t ) x + cos(ωo t ) y ]+ v oz t z
ωo
A trajetória resultante tem a forma helicoidal em torno do eixo z, como mostra a
Figura 1.14. Concluímos que uma partícula carregada, em movimento, ao entrar
em uma região de campo magnético, pode ser ‘capturada’ e passar a se propagar
em trajetória helicoidal em torno da direção da densidade de fluxo. Esse fenômeno
tem uma importância fundamental para a vida em nosso planeta. O campo
magnético terrestre forma uma barreira de proteção contra o bombardeamento de
partículas carregadas provenientes do Sol. Essa chuva de partículas de alta
energia poderia destruir a vida na superfície da Terra, mas o campo magnético
natural do planeta captura e desvia esse fluxo de partículas para os pólos. Lá,
essa alta concentração de partículas energéticas produz o interessante fenômeno
da aurora boreal, como resultado da excitação de moléculas da atmosfera por
meio de colisões.
33
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
x
y
r
vox
r
voz
r
b
z
Figura 1.14 – Movimento de uma partícula de carga positiva em um campo magnético uniforme.
___________________________Apêndice 1.1____________________________
Notação vetorial e sistemas de coordenadas espaciais
A posição de um ponto no espaço em relação à origem de um sistema de
referência é definida pelo vetor de posição. A posição de um ponto em relação a
outro diferente da origem, também é definida por um vetor de posição. Assim, se
r
r
dois pontos distintos p1 e p2 são definidos pelos vetores r1 e r2 , a posição de p2
em relação à p1 pode ser escrita na forma:
r
r r
r21 = r2 − r1
(A.1)
e a posição de p1 em relação à p2 é dada por:
r
r r
r12 = r1 − r2
(A.2)
A direção e sentido de um vetor são geralmente especificados pelo vetor unitário
correspondente. No caso do vetor de posição descrito em (A.1), o vetor unitário
correspondente é dado por:
r r
)
r2 − r1
(A.3)
r21 = r r
r2 − r
34
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
r
r )
E o vetor correspondente pode ser escrito na forma simples r12 = r12 r12 .
Em um sistema de coordenadas ortogonais um vetor pode ser representado como
a soma das projeções em cada direção coordenada. A Figura 1.15 mostra os
sistemas mais utilizados. No sistema retangular, os vetores unitários são fixos e
um vetor de posição é dado por:
r
) )
)
r = x x +y y + z z
(A.4)
r
)
)
)
r21 = (x 2 − x 1 ) x +(y 2 − y 1 ) y + (z 2 − z 1 )z
(A.5)
) ) )
onde os vetores unitários seguem a seguinte regra de transformação: x × y = z ,
) ) ) ) ) )
y × z = x e z× x = y .
z
θ
retangular
)
z
r
esférico
)
φ
)
θ
)
y
)
x
s
φ
x
)
r
y
)
z
cilíndrico
)
φ
)
s
Figura 1.15 – Vetores unitários nos sistemas de coordenadas retangular, cilíndrico e esférico.
No sistema cilíndrico o vetor unitário na direção axial é fixo, mas nas direções
radial e azimutal, as direções e sentidos dos vetores unitários variam com a
posição. Nesse sistema, um vetor de posição é dado por:
r
)
)
r = ss + z z
(A.6)
35
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
(A.7)
r
)
)
)
r21 = s 2 s 2 − s1 s1 + (z 2 − z 1 ) z
) ) )
e os vetores unitários seguem a seguinte regra de transformação: s × φ = z ,
) ) )
) ) )
φ× z = s e z × s = φ .
Uma vez que o vetor unitário radial varia com a posição, muitas vezes é desejável
escrever o vetor de posição usando as coordenadas cilíndricas mas tomando
como referência os vetores unitários retangulares. Nesse caso, temos:
r
)
)
)
r = s cos φ x + s senφ y + z z
(A.8)
r
)
)
)
r21 = (s 2 cos φ 2 − s1 cos φ1 ) x + (s 2 senφ 2 − s1 senφ1 ) y + (z 2 − z 1 ) z
(A.9)
No sistema esférico todos os vetores unitários variam com a posição. Nesse
sistema, um vetor de posição é dado por:
r
)
r =rr
(A.10)
r
)
)
r21 = r2 r2 − r1 r1
(A.11)
) ) )
e os vetores unitários seguem a seguinte regra de transformação: r × θ = φ ,
) ) )
) ) )
θ× φ = r e φ× r = θ .
Uma vez que o vetor unitário radial varia com a posição, muitas vezes é desejável
escrever o vetor de posição usando as coordenadas esféricas, mas tomando
como referência os vetores unitários retangulares. Nesse caso, temos:
r
)
)
)
r = r senθ cos φ x + r senθ senφ y + r cos θ z
(A.12)
(A.13)
r
)
)
r21 = (r2 senθ 2 cos φ 2 − r1 senθ1 cos φ1 ) x + (r2 senθ 2 senφ 2 − r1 senθ 2 senφ1 ) y
)
+ (r2 cos θ 2 − r1 cos θ1 ) z
Outro
aspecto
fundamental
diz
respeito
aos
elementos
diferenciais
de
comprimento, área e volume que são usados em integrais de linha, superfície ou
volume de um campo vetorial. Como mostra a Figura 1.16, esses elementos em
cada sistema de coordenada são dados por:
Sistema retangular:
r
)
)
)
(A.14)
dL = dx x + dy y + dz z
r
)
)
)
(A.15)
dS = dy dz x + dx dz y + dx dy z
(A.16)
dV = dx dy dz
36
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
Sistema cilíndrico:
r
)
)
)
(A.17)
dL = ds s + sdφ φ + dz z
r
)
)
)
(A.18)
dS = s dφ dz s + ds dz φ + sds dφ z
dV = sds dφ dz
(A.19)
Sistema esférico:
r
)
)
)
(A.20)
dL = dr r + r sen θ dφ φ + r dθ θ
r
)
)
)
(A.21)
dS = r 2 sen θ dφ dθ r + r dr dθ φ + r sen θ dr dφ θ
dV = r 2 senθ dr dφ dθ
(A.22)
x
retangular
dy
z
dx
cilíndrico
dz
φ
z
s
dz
ds
y
s dφ
r sen θ
r sen θdφ
θ
esférico
r dθ
r
φ
dr
Figura 1.16 – Elementos diferenciais nos sistemas de coordenadas retangular, cilíndrico e esférico.
37
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
___________________________Apêndice 1.2____________________________
Integração numérica
A integral definida de uma função de uma única variável pode ser calculada de
acordo com a seguinte expressão:
a +L
(A.23)
N
∫ f ( x ) dx = Lim ∑ f (a + n Δx ) Δx
Δx →0 n =1
a
onde o número N de divisões do intervalo de integração é calculado por:
(A.24)
N=
L
Δx
A integração numérica é um método usado para resolver integrais definidas para
as quais não se conhece a função primitiva do integrando. O método consiste em
dividir o intervalo de integração em intervalos Δx n arbitrariamente pequenos e
efetuar o somatório indicado em (A.23), escolhendo um valor de x em cada
intervalo Δx n para calcular o valor da função f(x). Portanto a integral definida é
calculada numericamente segundo a expressão:
(A.25)
a +L
N
a
n =1
∫ f ( x) dx ⇒ ∑ f ( x n ) Δx n
xn pode, por exemplo, ser obtido da seqüência ( a , a + Δx1, a + Δx1 + Δx 2 ,
a + Δx1 + Δx 2 + Δx 3 ,...) se o ponto escolhido for sempre no início do intervalo (ver
Figura 1.17). Se o ponto escolhido estiver no meio do intervalo as posições serão
dadas pela seqüência ( a +
Δx1
2
, a + Δx1 + Δx 2
2
, a + Δx1 + Δx 2 +
Δx 3
2
,...).
O número de divisões e a tamanho de cada divisão depende fundamentalmente
do comportamento da função f(x). Nas regiões em que f(x) varia intensamente em
curtos intervalos de x, deve-se usar um grande número de intervalos pequenos, a
fim de bem representar a forma original da curva. Nas regiões nas quais a função
pouco varia, pode-se usar poucos intervalos relativamente maiores. O número
final de divisões determina o tempo de processamento. Assim sendo, existe um
compromisso entre precisão e velocidade de obtenção da resposta.
Funções de mais de uma variável podem ser integradas de maneira semelhante.
No caso de uma integral dupla, por exemplo, teremos:
38
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
bd
(A.26)
N
∫ ∫ f ( x, y) dy dx ⇒ ∑
ac
M
∑ f ( x n , y m ) Δy m Δx n
n = 1 m =1
F(x)
a
b
x
Figura 1.17 – Representação esquemática do processo de discretização para cálculo numérico de
integral definida.
39
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
Exercícios propostos
1) Calcule o campo elétrico produzido pelas seguintes distribuições de carga,
supondo que uma carga total Q está distribuída uniformemente com as seguintes
geometrias.
a) Fio reto de comprimento L. Campo no eixo perpendicular que passa pelo
ponto médio do fio.
b) Fio circular de raio R. Campo no eixo perpendicular de simetria;
c) Superfície plana quadrada de aresta ‘a’. Campo no eixo perpendicular
de simetria;
d) Superfície plana circular de raio R. Campo no eixo perpendicular de
simetria;
e) Superfície esférica de raio R. Campo em qualquer posição do espaço;
f) Superfície cilíndrica de raio R. Campo no eixo de simetria;
2) Calcule a indução magnética produzida pelas seguintes distribuições de
corrente.
a) Espira circular de raio R – campo no eixo de simetria;
b) Espira quadrada de aresta ‘a’- campo no eixo de simetria;
c) Solenóide de comprimento L e n espiras de raio R por unidade de
comprimento. Campo no eixo de simetria;
d) Placa plana de largura w e comprimento L >> w. Corrente
uniformemente distribuída. Campo no plano transversal no meio da
placa;
3) Um elétron é arremessado contra uma superfície plana de grande área
carregada uniformemente com densidade σ = −10 −11C m −2 .
Se a velocidade
inicial do elétron é de 10 5 m s −1 e ele parte de uma distância de 10 cm na direção
que faz um ângulo de 45o com a normal ao plano, calcule a menor distância que o
elétron alcança da superfície.
4) Um núcleo de hidrogênio penetra em uma região de campo magnético
r
r
)
)
)
uniforme de indução b = 1000 z (G) com velocidade v = (2.5 x + 1.5 z ) x 10 5 ms −1 .
Calcule o raio e o passo (distância paralela ao campo percorrida pela partícula em
uma volta completa) da trajetória helicoidal seguida pelo núcleo.
5) Considere uma esfera metálica de raio 10 cm carregada com carga superficial
de
densidade
σ = 10 −6 C m −2
e
uma
molécula
de
massa
18 uma
40
ENGENHARIA ELETROMAGNÉTICA – Prof. Dr. Airton Ramos
( 1 uma = 1.6604 x10 −27 kg ) e carga 2e ( 1 e =1.602 x10 −19 C ) sendo arremessada
de uma grande distância contra a esfera na sua direção radial. Qual deve ser a
velocidade inicial da molécula para que ela se aproxime no máximo até 1 cm da
superfície da esfera.
r
)
6) Considere um campo magnético uniforme de indução b = b o z em toda a
extensão do eixo z e dentro de uma área quadrada com aresta ‘a’ no plano xy.
Partículas de
massa ‘m’ e carga ‘q’ penetram continuamente esse volume
ocupado pelo campo magnético. Considere que as partículas se deslocam na
direção perpendicular ao campo. Qual é a maior velocidade das partículas que
permitem que elas sejam capturadas pelo campo.
41