Nono Simpósio de Mecânica Computacional
Universidade Federal de São João Del-Rei – MG – DEMEC
Otimização do rendimento de um Mousetrap Car através de planilhas
eletrônicas interligadas
G.W. D. e Duque1; S. Y. Ribeiro1; M. E. Assumpção1; D. G. L. Barroso1; P. B. A. Filho1;
F. A. Ferreira1; T. H. Panzera1
1
Departamento de Engenharia Mecânica – Universidade Federal de São João del-Rei,UFSJ –,
São João Del-Rei, MG
CEP: 36307-352
e-mails: [email protected], [email protected], [email protected],
[email protected], [email protected], [email protected],
[email protected]
Resumo. O desenvolvimento de sistemas dinâmicos leva em variáveis interdependentes, como
resultante de forças e vetores de movimento. A análise desses fatores muitas vezes dispensa
complicações, porém se tratando de alguns projetos mais complexos é impossível ignorá-las.
Um exemplo destes projetos é o Mousetrap Car, um veículo miniatura movido unicamente pela
energia potencial elástica acumulada na mola de uma ratoeira. Várias instituições de ensino
utilizam esse projeto para o ensino de dinâmica dos corpos, no qual os alunos são instigados a
projetar e construir um carro que percorra a maior distância possível usando uma ratoeira
padrão. O trabalho aqui referido visa utilizar planilhas eletrônicas interligadas para
correlacionar as variáveis envolvidas e prever o movimento de um Mousetrap Car, dadas suas
dimensões como dados de entrada. A análise por este tipo de planilhas permite a visualização
de causa e conseqüência de cada variação geométrica relevante no veículo. Sendo assim,
torna-se possível variar esses parâmetros geométricos de acordo com as possibilidades
construtivas e determinar as melhores configurações possíveis para o Mousetrap Car. O
trabalho serve como exemplo de como essas planilhas podem influenciar positivamente o
projeto de sistemas dinâmicos, de forma prática e instantânea.
1
Nono Simpósio de Mecânica Computacional
1
Universidade Federal de São João Del-Rei – MG – DEMEC
INTRODUÇÃO
O Mousetrap Car foi inventado por James Henry Atkinson na Inglaterra em 1897, e desde
então vem sendo usado por escolas no ensino de física em muitos países. Existem atualmente
duas modalidades: Distância Máxima Percorrida e Menor Tempo de Percurso. Para o projeto
atual foi adotado a distância máxima percorrida, com uso de uma ratoeira pequena, indicada
para camundongos.
Para correlacionar as variáveis influentes no desempenho do veículo são necessárias
várias funções compostas, de forma que muitas vezes o resultado de uma determinada função
entra como um valor constante no cálculo de outra destas funções. O uso de tabelas em
planilhas interligadas pode correlacionar uma cadeia de funções interdependentes.
O objetivo do referido trabalho é demonstrar como o uso dessas tabelas pode simplificar
em muito o processo de cálculo, de uma maneira simplificada e prática. Para isso foi
desenvolvido um sub-programa denominado CM-MouseTraper, onde a sigla CM se refere ao
nome da equipe responsável pelo desenvolvimento do projeto, “Crazy Mouse”, e Mousetraper
é um neologismo traduzido corretamente como “gerador de Mousetrap Cars”. Este programa
gera gráficos de desempenho do veículo tendo como dados de entrada apenas as relações
geométricas do carro, a massa dos componentes e os coeficientes de atrito admitidos.
Alguns trabalhos publicados neste campo demonstram que é possível otimizar parâmetros
através de planilhas eletrônicas.
SCARPE[3], em seu trabalho, mostra como é possível otimizar uma matriz energética
siderúrgica através de um software baseado em planilhas eletrônicas. O software desenvolvido,
SIMAE® (Sistema de Matriz Energética), visa otimizar o processo dentro de indústrias
siderúrgicas e, dessa forma, reduzir custos mantendo os níveis de produtividade.
PINTO[4], por sua vez, estudou modelos matemáticos implementados em planilhas
eletrônicas visando gerar um planejamento de lavra eficiente, e assim da mesma forma, reduzir
custos operacionais na manutenção de minas a céu aberto, usando como base as mesmas
planilhas em questão.
Este trabalho por sua vez, visa demonstrar que ao interligar planilhas eletrônicas, é
possível obter softwares capazes de resolver problemas multidimensionais, funções se tornando
variáveis de outras funções. Essa é a finalidade do CM-MouseTraper, determinar melhores
condições de projeto avaliando resultados, tendo como dados de entrada, condições
geométricas de um modelo idealizado.
2
MATERIAIS E MÉTODOS
O desenvolvimento do software depende de uma correta compreensão dos processos
envolvidos no movimento do carro, bem como um correto equacionamento dos mesmos. Dessa
forma se torna possível modelar as planilhas e interligá-las de forma a obter os resultados
esperados.
2
Nono Simpósio de Mecânica Computacional
Universidade Federal de São João Del-Rei – MG – DEMEC
Princípios básicos de funcionamento do veículo
O carro funciona de acordo com os seguintes parâmetros:
Uma haste presa à ratoeira gira em torno do centro da mola.
Na ponta da haste se prende um fio, que é enrolado no eixo traseiro do carro.
À medida que a haste gira, o fio se desenrola, tracionando o eixo traseiro.
A tração no eixo gera um deslocamento angular que se transmite às rodas com diâmetro
muito maior do que o eixo.
A relação entre os diâmetros da roda e do eixo tracionado determinam a distância
máxima que pode ser percorrida pelo carro.
As forças consumidoras de energia que agem no conjunto são forças de atrito estático e
cinético que agem na interface com o solo e nos mancais, respectivamente. A força de
atrito com o ar é desprezada devido ao Número de Reynolds muito reduzido por efeitos
de baixa velocidade de operação, implicando um coeficiente de arrasto que pôde ser
desprezado de acordo com as necessidades e objetivos do projeto.
Equações de Estática e Dinâmica Utilizadas
As equações utilizadas são retiradas da bibliografia [1 e 2], e são aquelas que
determinam o comportamento estático e dinâmico do carro, as quais estão relacionadas abaixo:
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
Equações Cinemáticas Utilizadas
Para gerar os resultados finais cinemáticos, são usadas as equações de movimento
abaixo relacionadas, ambas retiradas da bibliografia [2].
(10)
(11)
Existem várias formas de converter a energia potencial elástica da mola em energia
cinética, sendo a mais difundida a que usa uma haste que, ao desenrolar um fio inicialmente
enrolado no eixo, faz com que o carro se mova. No caso do “Mousetrap Car” de distância, o
ideal é que a haste seja o maior possível, de forma a aumentar a distância angular máxima
produzida pelo eixo, em regime de aceleração positiva. Para isso é necessário conhecer cada
3
Nono Simpósio de Mecânica Computacional
Universidade Federal de São João Del-Rei – MG – DEMEC
variável relevante, que interfira positiva ou negativamente nos resultados finais. Dentre essas
variáveis podemos citar:
Comprimento do carro entre os eixos (L.e)
Comprimento do eixo dianteiro até o centro de rotação da ratoeira (L.i)
Comprimento da haste (L.h);
Raio das rodas (R);
Raio do eixo trator (r);
Massa das rodas;
Massa da estrutura;
Massa da haste;
Coeficiente de atrito estático entre as rodas e o solo;
Coeficiente de atrito estático entre os mancais e os eixos;
Coeficientes de atrito cinético entre os mancais e os eixos;
Centro de gravidade do carro sem a haste estar fixada no mesmo;
Ângulo Téta descrito pela haste no movimento da ratoeira, variando de 0° a 180°.
Esboço e definições preliminares do Carro
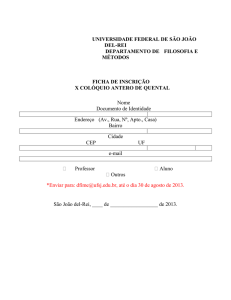
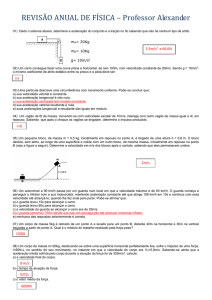
Abaixo é possível contemplar o esboço do carro com algumas das suas medidas mais
importantes, valendo ressaltar que o esboço é apenas ilustrativo.
Figura 1 – Esboço do modelo com suas respectivas variáveis geométricas
A estrutura é feita treliçada com palitos de madeira colados com super adesivo à base
de cianoacrilato. As rodas são feitas de CDs com alívio de massa e mancais confeccionados
com rolamentos existentes nos discos rígidos para computadores (HDs). Os eixos serão de
tubos de cobre, com diâmetro de 2,5 mm. A haste é também feita de palitos de madeira,
agrupadas paralelamente para aumentar o momento de inércia. O fio trator é bastante fino,
capaz de suportar o valor de tração máxima. Os coeficientes de atrito utilizados foram
inicialmente estimados tendo como base tabelas de vários materiais, acrescendo-se um fator de
segurança. Essa escolha foi feita pois, se os coeficientes tem um valor real menor do que o
hipotético, o carro percorrerá uma distância maior.
4
Universidade Federal de São João Del-Rei – MG – DEMEC
Nono Simpósio de Mecânica Computacional
Os mancais são polidos e lubrificados para reduzir os coeficientes de atrito estático e
cinético com o eixo trator, e a borda das rodas tratoras recebe uma fina camada de cola à base
de silicone ou PVC, com o intuito de aumentar levemente a aderência com o solo impedindo o
deslizamento. A aceleração da gravidade local é tomada como 9,77m/s², com base em estudos
realizados pelo Departamento de Ciências Naturais (DCNAT), Universidade Federal de São
João del-Rei (UFSJ).
Determinação do modelo de análise das variáveis: CM-MouseTraper
A compreensão física dos processos dinâmicos do veículo deve ser bem consistente,
visto que as funções utilizadas nas planilhas são puramente matemáticas, e apenas não são
consideradas indefinições matemáticas, as quais inclusive podem ser resultado dos cálculos
físicos.
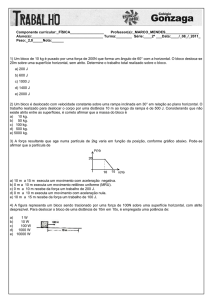
A determinação de uma configuração satisfatória das medidas do veículo depende da
análise interligada das variáveis envolvidas no projeto citadas anteriormente. Como exemplo,
podemos citar o seguinte diagrama de dependências:
Distância
máxima
percorrida
Aceleração
angular do
eixo
Tração no fio
Ângulo entre o
fio e a haste
(Alfa)
Compriment
o da haste e
do entreeixos
Forças de atrito nos
mancais e no solo
Momento da
mola e
compriment
o da haste
Ângulo
descrito pela
ratoeira
(Téta)
Raio das
rodas e do
eixo trator
Reações nos
mancais e no
solo
Massa
total do
carro
Massa da
haste e do
carro
Coeficientes
de atrito
Centro de
Gravidade do
Carro
Centro de
gravidade do
carro sem a
haste
Comprimento
da haste
Figura 2 – Árvore de dependência das variáveis utilizadas
A árvore de dependências acima serve para esquematizar a ligação entre as planilhas do
software.
5
Universidade Federal de São João Del-Rei – MG – DEMEC
Nono Simpósio de Mecânica Computacional
Pode-se, por exemplo, verificar que o dado mais importante no projeto de um Mousetrap
Car dessa categoria é a distância máxima percorrida. Ela, portanto, é o ponto de partida para
todo o resto.
Cada variável subseqüente é dividida em outras variáveis até obter apenas valores
constantes. Esses valores serão os dados de entrada na planilha inicial. As planilhas que
compõem o programa são:
Definições físico-geométricas, a qual recebe os dados de entrada com respeito
às dimensões, massa de componentes, e dados físicos importantes aos cálculos.
Alfa em função de Téta, onde o ângulo entre o fio e a haste (Alfa) é calculado
de acordo com a variação do ângulo descrito pela haste (Téta). Esse cálculo é
imprescindível à determinação da tração no fio em cada instante do
movimento.
CG e Reações, que determina as reações nos mancais e no piso, bem como a
variação do CG do carro devido à ação da força peso da haste. A variação do
CG influencia as reações traseiras do carro que por sua vez influenciarão as
forças de atrito que se opõem ao movimento.
Forças de Atrito, responsável por determinar as forças opositoras ao
movimento. Essa planilha se correlaciona com a anterior, e é indispensável
para calcular a aceleração resultante do carro.
Tração e Aceleração Linear, onde a tração no fio é calculada, de acordo com
os resultados das planilhas, e, conseqüentemente, a aceleração linear do carro,
utilizando as equações dinâmicas já apresentadas.
Cinemática, por fim, relaciona todo o material anteriormente calculado para
obter os gráficos e tabelas de distância, velocidade e aceleração em função do
tempo, além de calcular a distância máxima percorrida, comparando-a com a
real que foi obtida pelo gráfico.
Cálculo do Alfa em função de Téta
Para calcular a variação do ângulo Alfa em função do ângulo Téta, usamos relações
matemáticas vetoriais, alcançando a seguinte fórmula:
x²
a cos
L .h
x²
L .r x
2 x L .r
y²
L .r ²
,
(12)
y²
onde L.r=L.e-L.i, bem como x e y são coordenadas vetoriais.
A dedução da fórmula pode ser conseguida considerando-se OA um vetor igual a L.r,
OB um vetor igual a L.h, e AB o vetor resultante da subtração dos mesmos. Conhecendo-se
OA e OB, e o ângulo formado entre eles ou seja, Téta, é possível descobrir o ângulo entre a
haste e o carro, que é Alfa.
6
Nono Simpósio de Mecânica Computacional
Universidade Federal de São João Del-Rei – MG – DEMEC
Cálculo do passeio de CG e das reações nos mancais e no piso
Quando a haste descreve o ângulo Téta, sua massa faz com que o centro de gravidade
do veículo varie. Para prever o quanto essa interferência reflete na posição do CG, usamos as
seguintes relações:
D .h
L .h
L .i
(13)
cos
2
onde D.h é o ponto de ação do peso da haste à partir do eixo dianteiro.
D .c W .c
CG
Dh W .h
W .c
W .h
(14)
onde D.c é o CG do carro sem a haste, medido empiricamente; W.c é o peso do carro sem a
haste; W.h é o peso da haste.
Com os valores do CG em função de Téta, calcula-se o valor das reações no piso:
R .t
W .t CG
(15)
L .e
R .d
W .t
R .t .m
(16)
R .t
(W .t
2 W .r ) CG
L .e
(17)
Sendo que R.t é a reação traseira no piso, W.t é o peso total do carro, R.d é a reação
dianteira no piso, R.t.m é a reação traseira nos mancais e W.r é o peso da roda.
Cálculo das forças de atrito no piso e nos mancais
Devido às baixas velocidades de operação, da ordem de 0,1m/s, ignoramos o atrito com o
ar, considerando que em baixas velocidades o Número de Reynolds é muito pequeno e
conseqüentemente o coeficiente de arrasto.
O atrito nas rodas pode ser definido de acordo com as seguintes expressões:
Fat e .d
Fat e .t
(
e
R .d
e
R .t )
Fat c .d .m
(19)
2
Fat e .d .m
Fat e .t .m
(18)
[
e
( R .d
W .r )
e
( R .t
2 W .r )]
2
c
( R .t
W .r )
(20)
(21)
(22)
7
Universidade Federal de São João Del-Rei – MG – DEMEC
Nono Simpósio de Mecânica Computacional
Fat c .t .m
[
( R .t
c
2 W .r )]
(23)
2
Sendo os índices d.m e t.m referentes à reação dianteira e traseira nos mancais,
respectivamente. É importante ressaltar que a força de atrito nos mancais para o primeiro
instante é definida pelo coeficiente estático de atrito, e logo depois, considera-se o cinético.
Isso é feito para impedir erros no cálculo de resultantes que impliquem em zero aceleração na
largada.
Cálculo da tração no fio e da aceleração linear em função de Téta
A tração no fio pode ser determinada através da seguinte expressão:
, (24), sendo que F.h é a força na ponta da haste e é o ângulo entre o fio
e a haste. Como Alfa varia, a tração será variável também, e acompanhará as dimensões
escolhidas para o carro.
r , e também como:
A aceleração linear pode ser escrita como a G
T.f
aG
F .h sen
T.f r
r ( Fat .d .m
Fat .t .m )
R ( Fat .d
Fat .t )
WT
, g=9,77m/s²
(25)
g
Como as forças atuantes são funções de Téta, a aceleração linear também será função de
Téta.
Cálculos cinemáticos
Como a tração no fio é variável a aceleração não é constante, implicando na necessidade de
um novo equacionamento, que pode ser obtido pela definição matemática de cálculo integral.
Divide-se o intervalo total de 180° em 35 intervalos de 5°, e para cada intervalo toma-se
uma aproximação de aceleração média constante.
Há uma relação entre a distância percorrida para cada intervalo de 5°, tal que:
D máx
2 L .h
R
r
2 L .h
, (26) então, D 5
R
r
5 , (27) sendo D 5 a distância percorrida
pelo carro correspondente a cada cinco graus de rotação da haste.
Sabe-se também que a
d ²s
dt ²
, (28) obtendo então uma função que descreve a aceleração
em função do tempo. Podemos conseqüentemente obter gráficos d-t, v-t e a-t com facilidade. A
distância máxima teórica percorrida pode ser definida como:
8
Nono Simpósio de Mecânica Computacional
D máx
2 L .h
R
r
Universidade Federal de São João Del-Rei – MG – DEMEC
, (29) sendo esta tomada como referência para medir a eficiência do
carrinho através da razão entre a distância percorrida e a distância máxima teórica.
Desenvolvimento do Mousetrap Car
Para a decisão sobre as dimensões do carro, algumas das variáveis são escolhidas e
tomadas como invariantes, entre elas:
Massa dos componentes (com variações pequenas para a grande maioria);
Massa dos Componentes
Massa da roda
0,01
Massa da haste
0,022
Massa da estrutura
0,015
Massa da ratoeira
0,032
Massa adicionada na construção
0,01
Massa total do carro
0,109
Kg
Kg
Kg
Kg
Kg
Kg
Raio das rodas, igual a 60 mm, feitas de CDs;
Raio do eixo, igual a 1,4 mm, já considerando o acréscimo devido ao acúmulo
da linha enrolada em volta mesmo. O raio do eixo poderá ser alterado no caso
de sobra de potência na corrida experimental.
Comprimento do centro de rotação da ratoeira até o eixo dianteiro, definido
como 110 mm, para garantir que não haja contato da ratoeira com a roda
dianteira.
A distância do CG sem a haste é estimada empiricamente, definida como uma
aproximação 0 , 28 L.e , sendo 0,28 um fator de correção para estimativa do
CG.
Os coeficientes de atrito são estimados como 0,15 para atrito estático das rodas
com o solo, 0,09 para atrito estático nos rolamentos e 0,07 para atrito cinético
nos mesmos. Essas estimativas foram feitas com base na análise de muitas
tabelas de coeficientes disponíveis na internet.
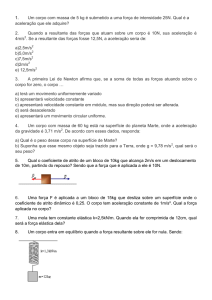
O gráfico de momento da mola da ratoeira foi obtido medindo a força da mola
na ponta do batente para cada incremento de ângulo. Por fim, encontrou-se o
seguinte gráfico:
9
Universidade Federal de São João Del-Rei – MG – DEMEC
Nono Simpósio de Mecânica Computacional
0.4
Momento da Mola(N.m) x ângulo Téta(graus)
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
0
50
100
150
Figura 3 – Momento da mola x ângulo Téta.
Decidiu-se então após uma variação dos dados, pela seguinte configuração:
Medidas de Entrada
L.e
0,5
L.i
0,11
L.h
0,5
R
0,06
r
0,0014
m
m
m
m
m
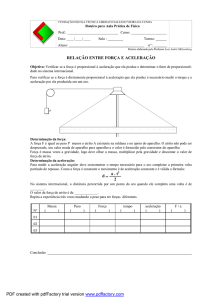
Alfa
Alfa x Téta
55.00
50.00
45.00
40.00
35.00
30.00
25.00
20.00
15.00
10.00
5.00
0.00
alfa x téta
0
20
40
60
80
100
120
140
160
180
Téta
Figura 4- Ângulos Alfa x Téta
10
Universidade Federal de São João Del-Rei – MG – DEMEC
Nono Simpósio de Mecânica Computacional
0.2000
Distância do CG (m) x Ângulo Téta (graus)
0.1800
0.1600
0.1400
0.1200
0.1000
0.0800
0.0600
0.0400
0.0200
0.0000
0
20
40
60
80
100
120
140
160
180
Figura 5 – Gráfico do passeio de CG
Reações (N) x Ângulo Téta (graus)
1.0000
0.9000
0.8000
0.7000
Reação dianteira no Piso
0.6000
0.5000
Reação traseira no Piso
0.4000
Reação traseira nos
Mancais
0.3000
0.2000
0.1000
0.0000
0
50
100
150
Figura 6 - Reações no solo e mancais
11
Universidade Federal de São João Del-Rei – MG – DEMEC
Nono Simpósio de Mecânica Computacional
0.1400
Forças de Atrito (N) x Ângulo Téta (graus)
0.1200
0.1000
0.0800
0.0600
Fat est. no piso tras.
(N)
0.0400
0.0200
0.0000
0
20
40
60
80
100
120
140
160
180
Figura 7 - Forças de atrito
Tração no fio (N) x ângulo Téta (graus)
0.6000
0.5000
0.4000
0.3000
0.2000
0.1000
0.0000
0
20
40
60
80
100
120
140
160
180
Figura 8 - Tração no fio
Aceleração linear do carro (m/s²) x ângulo Téta (graus)
0.4000
0.3000
0.2000
0.1000
0.0000
0
20
40
60
80
100
120
140
160
180
200
Figura 9 – Aceleração linear do carro em função de Téta
12
Universidade Federal de São João Del-Rei – MG – DEMEC
Nono Simpósio de Mecânica Computacional
3
ANÁLISE DOS RESULTADOS
Os resultados foram bastante satisfatórios obtendo uma distância máxima teórica de 42,9
metros, porém a máxima em regime de aceleração positiva obtida foi de 32,5 metros, com
eficiência de distância em regime de aceleração de 76%.
A velocidade máxima encontrada foi de 0,59 m/s no instante 22” após a largada e
aceleração máxima de 0,35 m/s². O tempo previsto de trajeto foi de 1’29” em regime de
aceleração positiva.
Obviamente a partir do instante de aceleração igual a zero o carro entrará em frenagem por
ação das forças de atrito, alcançando alguns metros a mais.
Os gráficos de cinemática devem ser lidos a partir da origem e seguem até o ponto de
inflexão horizontal da curva, desprezando-se os valores a partir desse momento. Esses valores
são resultado de descontinuidades matemáticas externas aos dados relevantes. Os gráficos
podem ser visualizados abaixo:
Distância (m) x Tempo (s)
42.50
40.00
37.50
35.00
32.50
30.00
27.50
25.00
22.50
20.00
17.50
15.00
12.50
10.00
7.50
5.00
2.50
0.00
-20
0
20
40
60
80
100
Figura 10 – Gráfico final da distância x tempo
13
Universidade Federal de São João Del-Rei – MG – DEMEC
Nono Simpósio de Mecânica Computacional
Velocidade (m/s) x Tempo (s)
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
-20
-0.1
0
20
40
60
80
100
Figura 11 - Gráfico final da velocidade no tempo
Aceleração Linear (m/s²) x Tempo (s)
0.4
0.3
0.2
0.1
0
-20
0
20
40
60
80
100
-0.1
-0.2
Figura 12 - Gráfico final da aceleração linear no tempo
Aceleração Linear (m/s²) x Distância (m)
0.400
0.300
0.200
0.100
0.000
0.00
5.00
10.00
15.00
20.00
25.00
30.00
35.00
40.00
-0.100
-0.200
Figura 13 - Gráfico final da aceleração linear na distância
14
Nono Simpósio de Mecânica Computacional
Universidade Federal de São João Del-Rei – MG – DEMEC
Um protótipo do carro foi construído, o qual andou 30 metros contra os 32,5 previstos pelas
planilhas. CM-MouseTraper obteve sucesso e mostrou que o uso de planilhas eletrônicas pode
solucionar problemas com muitas variáveis. De certa forma as planilhas isoladas são incapazes
de gerar resultados multidimensionais, porém quando interligadas, elas passam a correlacionar
as funções de uma variável como funções compostas. Abaixo uma imagem esquemática do
carro definitivo:
Figura 14 – Desenho renderizado do veículo final
4
CONCLUSÃO
A precisão dos resultados revelou o quanto softwares desse tipo podem ser aplicáveis no
projeto de componentes ou até mesmo sistemas completos. O CM-MouseTraper obteve um
erro de apenas 1,5% sobre os resultados do protótipo. As planilhas eletrônicas interligadas são
capazes de resolver projetos complexos de forma simples, garantindo praticidade e boa
interação com o usuário, possibilitando ao mesmo modificar o projeto e o software, de forma a
atender as expectativas.
5
BIBLIOGRAFIA
[1]
HIBBELER, R. C. Mecânica Estática. 10ª ed. PEARSON, 2005
HIBBELER, R. C. Dinâmica. 10ª ed. PEARSON, 2005
[3]
SCARPE, A. A; MELO, A. M; ROVAY, C. J; BARBOSA, A. P; BARCELOS, A;
ALMEIDA, F. T; PINHO, J. F; MILANEZ, E. M; PÉCORA Jr, J. E. Otimização da matriz
energética da CST.
[4]
PINTO, L. R; BIAJOLI, F. L; MINE, O. M. Uso de otimizador em planilhas eletrônicas para
auxílio ao planejamento de lavra.
[2]
6
DIREITOS AUTORAIS
Os autores são os únicos responsáveis pelo conteúdo do material impresso incluído no seu
trabalho.
15