NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
4.2
70
CINETICA DO CORPO
HUMANO
a. Sistemas de massa
A seção anterior considerou cinemática de
corpo
humano
e
definiu
as
equações
pertinentes. Recorde que estas equações
descreveram o movimento com respeito a seu
deslocamento,
velocidade,
e
aceleração
independente da causa daquele movimento.
Nesta seção revisaremos a cinética de corpo
humano: equações pertinentes, que apesar de
baseadas nas equações da cinemática, também
incorporam parâmetros de força e impulso,
que de fato causam o movimento.
A cinética de corpo humano pode ser dividida
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
em
linear
(rotacional).
acontece
(translacional)
Movimento
como
e
de
conseqüência
71
angular
translação
da
força
aplicada ao corpo, e movimento de rotacional
ocorre quando um momento age sobre o
corpo. O campo de cinética pode ser
subdividido em cinética de partícula e cinética
de corpo rígido. Nosso propósito aqui será
obter visão geral do movimento de um corpo
sem especificar as propriedades geométricas
daquele corpo. Por conseguinte, podemos
tratar o corpo como uma partícula localizada
no seu centro de massa. Esta partícula terá
uma massa igual à massa total do corpo.
Recorde que, no Capítulo 3, a estática de
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
72
corpo rígido foi usada: similarmente, cinética
de corpo rígido é importante quando o corpo
ou corpos está sofrendo um movimento
rotacional.
Os componentes cartesianos para vetores de
força e de aceleração são expressos como:
∑ Fx = max
(35)
∑ Fy= may
(36)
Movimento uniaxial (translacional) acontece
ao longo de uma linha direta. Para estes
sistemas, uma única coordenada (x) é usada,
cujo eixo está ao longo da linha de reta nas
equações de movimento naquela direção.
Quatro casos especiais de movimento transla-
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
73
cional são de particular interesse: a força é
constante, a força é uma função do tempo, a
força é uma função de velocidade, ou a força
é função do deslocamento.
De acordo com a segunda lei de Newton,
quando a força aplicada a um corpo é de
magnitude constante e aplicada em uma
direção constante, o corpo se moverá a uma
aceleração constante na direção de aplicação
de força:
ax =
F
X
(t)
m
= constante
(37)
Uma força pode ser aplicada em uma
direção constante, porém, a magnitude da
força pode variar com o tempo. A aceleração
resultante do corpo será:
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
F (t)
74
x
ax(t) =
(38)
m
Também pode ser aplicada força como uma
função de velocidade. Considerando que
aceleração
é
a
taxa
de
mudança
de
velocidade, a segunda lei de Newton pode ser
reescrita para este caso especial como:
dυ x
M . dt = Fx(υx)
A
equação
(39)
(39)
pode
ser
tratada
matematicamente por separação de variáveis:
dυ x
m Fx ( υ x ) = dt
(40)
Em alguns casos, pode ser conveniente
expressar
força
como
uma
função
de
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
75
deslocamento. Até certo ponto será análoga a
equação (39). A segunda lei de Newton pode
ser reescrita como:
dυ x
m dt = Fx(x)
(41)
Usando a regra de cadeia, a taxa de mudança
de velocidade é:
dυ x dυ x dx dυ x
=
=
υx
dt
dx dt
dx
(42)
Substituindo a equação (42) em (41) resulta
na equação de movimento na direção x:
dυ
mυx dx = Fx(x)
Usando separação de variáveis:
(43)
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
mυx dυx = Fx(x) dx
76
(44)
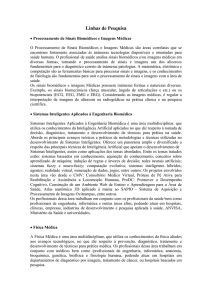
Figura 4.5.a Puxando um engradado num
cimento áspero
4.5.b Puxando um engradado sobre rodas.
Aplicação de HFE. Um HFE analisará
uma tarefa na qual o humano está
interagindo como parte de um sistema de
trabalho. Inicialmente, analisa a tarefa que
o humano está executando, e redefine
técnicas para que a tarefa possa ser
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
77
executada mais fácil e eficazmente.
EXEMPLO 4.6
a. Considere uma pessoa que puxa um
engradado (com uma massa M de 60 kg) ao
longo de uma superfície horizontal de
cimento áspero (coeficiente de atrito µ = 0.3)
como mostrado em Figura 4.5.a. Se a pessoa
faz uma força constante (T=250 N) a um
ângulo θ=30º, ache a aceleração do engradado
(assumindo que o fundo do engradado
permanece em contato com o chão).
b. A
tarefa
do
Exemplo
4.6(a)
foi
modificada colocando o engradado sobre
rodas, como mostrado em Figura 4.5.b.
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
78
Isto eleva a carga e reduz o ângulo θ da
corda usada para puxar para 15º. Se o
coeficiente de atrito diminui (µ = 0,1),
ache a nova força (T) que deve ser
aplicada à corda para alcançar a mesma
aceleração horizontal do Exemplo 4.6(a).
SOLUÇÃO 4.6(a)
Dados:
m = 60 kg
θ = 300
T = 250N
µ = 0.3
Ache a:
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
79
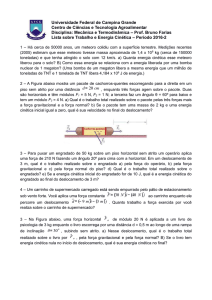
Desenhe o diagrama de corpo rígido, FBD 1,
da Figura 4.5.a:
Para equilíbrio dinâmico (de uma partícula):
O FBD 1 se reduz a FBD 2:
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
80
Neste problema, é justificável tratar um bloco
obviamente rígido (FBD 1) como uma
partícula (FBD 2) que representa a massa
inteira localizada no centro de massa do
bloco. Desde que o bloco inteiro esteja em
contato com o chão, não esteja sujeito a
movimento de rotacional, e logo todo o
movimento seja completamente translacional,
as equações são:
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
∑ Fy = may
(i)
∑ Fy = max
(ii)
81
Desde que o chão seja perfeitamente horizontal, não haja componente vertical de deslocamento, velocidade, ou aceleração, a equação
(1) se reduz a:
∑ Fy = 0
R – W + Fy = 0
(iii)
R – mg + T . senθ = 0
R = mg – T . senθ
Resolvendo
(iv)
∑ Fx = max
FT – Ff = max
T cosθ - µR = max
(v)
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
82
Dividindo por m, e substituindo a equação
(iv) na equação (v):
T .cos θ
µ (mg – T senθ)
ax =
–
m
m
Rearranjando:
T
ax = m (cosθ + µ senθ) – µg
Substituindo:
ax =
250
60 (0.866
+ [.3][.5] – (.3)(9.81)
ax = 4,23 – 2,94 = 1,29 m/sec²
SOLUÇÃO 4.6(b)
Dados:
M = 60kg
θ = 15º
(vi)
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
83
ax = 1.29 m/sec²
µ = 0.1
Rearranjando
equação
4.4(a)
(vi)
e
substituindo:
(60)[1.69 + (.1)(9.8)]
T=
[.966 + (.1)(.259) ]
(60)(2.27)
T=
= 137 N
(.992)
A força mostrada foi reduzida através de
uma plataforma sobre rodas. Note que dois
fatores contribuíram. A fricção foi reduzida
e a carga elevada (diminuiu o ângulo, θ).
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
84
Quando uma força horizontal F constante é
aplicada em um corpo, movendo-o de1 para 2
distante de s, o trabalho feito no corpo é:
W12 = F . s
Lembre-se
que
a
energia
(45)
potencial
gravitacional de um corpo, PEg, em 1 vertical
relativa a posição 2 é W• h = mg
PEg = W . h = mgh.
(46)
Desde que W seja o peso do corpo, e h a
distância vertical entre posição 1 e 2, a
energia potencial da gravidade representa o
trabalho que um corpo realiza ao mover-se de
uma distância vertical h.
Enquanto energia potencial é associada com a
posição (deslocamento), energia cinética é
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
85
associada com velocidade. Para um objeto
com massa (m) que está se movendo com
uma velocidade (v), a equação para energia
cinética é:
1
KE = 2 m. v²
(47)
Para sistemas de partículas, há uma relação
entre a energia cinética e o trabalho feito. O
trabalho feito em um corpo (tanto faz se as
forças são internas ou externas) para deslocar
este corpo de posição 1 para a 2 quando
somado à energia cinética na posição 1 dará a
energia cinética da posição 2. Esta relação é
conhecida como o teorema de trabalhoenergia e pode ser expressa como:
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
KE1 + W12 = KE2
86
(48)
O princípio de conservação de energia
mecânica pode ser declarado como segue:
KE1 + PE1 = KE2 + PE2
(49)
Esta equação diz que, quando um sistema
conservativo de partículas é movido pela ação
de forças, a soma da energia cinética e a
energia potencial se mantêm constante. A
soma KE + PE é a energia mecânica total do
sistema (chamada de E). Deve-se notar que,
com respeito à equação (49), quando as
partículas do movimento do sistema estão sob
a ação de forças internas, a energia potencial
do sistema deve incluir a energia potencial
dessas forças internas.
NOTAS DE AULA – INTRODUÇÃO À ENGENHARIA BIOMÉDICA
87
É importante notar que, quando um sistema
mecânico envolver atrito, a energia mecânica
total não permanece constante, mas diminuirá
devido ao movimento da posição 1 para
posição 2. Porém, o princípio de conservação
de energia requer que a energia mecânica do
sistema não seja perdida, portanto esta é
transformada em calor. Então, no caso de
atrito, a soma da energia mecânica e da
energia térmica do sistema é constante.