Victor Siqueira Cunha
Projeto e Simulação de um AMP-OP para
Validação de um Sistema de Filtro de Tempo
Discreto
Curitiba
2016
Victor Siqueira Cunha
Projeto e Simulação de um AMP-OP para Validação de
um Sistema de Filtro de Tempo Discreto
Projeto de Graduação como requisito de matrícula na disciplina TEX003 – Projeto de
Engenharia Elétrica para Dupla Diplomação,
do Departamento de Engenharia Elétrica, Setor de Tecnologia, Universidade Federal do
Paraná
Universidade Federal do Paraná – UFPR
Departamento de Engenharia Elétrica
Graduação em Engenharia Elétrica
Orientador: Prof. Dr. Luis Henrique A. Lolis
Curitiba
2016
Agradecimentos
Agradeço aos meus pais por todo o suporte e incentivo. Estes me fizeram quem
sou.
Resumo
Os dispositivos sem fio, amplamente utilizados nos dias de hoje, exigem um baixo consumo
de energia e precisam ser flexíveis a múltiplas frequências de portadoras. A técnica de
subamostragem é usada de modo a reduzir os requisito do amostrador, resultando em
circuitos com consumo de potência reduzido. O presente trabalho consiste no estudo de
sinais e sistemas e no projeto de um amplificador operacional de transcondutância (OTA)
com especificações para funcionamento em um filtro de tempo discreto, que faz o uso de
capacitores chaveados e possui frequência de amostragem de 25 Mhz.
Palavras-chave: Amplificador Operacional de Transcondutância, Filtro de Tempo Discreto, Capacitores Chaveados.
Abstract
Wireless devices, widely used today, require low power consumption and need to be
flexible at multiple carrier frequencies. The subsampling technique is used in order to
reduce sampler requirement, resulting in circuits with reduced power consumption. The
present work consists of the study of signals and systems and the design of a operational
transconductance amplifier (OTA) with specifications for operation in a discrete time filter,
which operates with switched capacitors and has a sampling frequency of 25 Mhz.
Keywords: Operational Transconductance Amplifier, Discrete Time Filter, Switched
Capacitors.
Lista de ilustrações
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
1
2
3
4
5
6
7
8
–
–
–
–
–
–
–
–
Sinal em Tempo Discreto . . . . . . . . . . . . . . . . . . . . . . . . . .
Representação de um Sistema em Tempo Discreto . . . . . . . . . . . .
Representação de um passa baixa em Tempo Discreto . . . . . . . . . .
Representação de um delay unitário no domínio z . . . . . . . . . . . .
Representação da EDCC no domínio z . . . . . . . . . . . . . . . . . .
Representação de um FIR e sua resposta em frequência |H(f )|2 . . . .
Resposta em frequência |H(f )|2 de um filtro IIR . . . . . . . . . . . . .
Representação de um capacitor em um circuito integrado (a) construção
física (b) modelo elétrico . . . . . . . . . . . . . . . . . . . . . . . . . .
9 – Representação de um switch com transistores MOSFET (a) NMOS (b)
PMOS (c) CMOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10 – Símbolo e circuito equivalente de um AMP-OP ideal . . . . . . . . . .
11 – Representação de 2 clocks não sobrepostos (a) 2 sinais de clock (B)
realização prática dos clocks . . . . . . . . . . . . . . . . . . . . . . . .
12 – Representação de um resistor com capacitores chaveados (a) circuito
(b) resistor equivalente . . . . . . . . . . . . . . . . . . . . . . . . . . .
13 – Circuito de um FIR de 4a ordem com capacitores chaveados . . . . . .
14 – Circuito de um IIR a partir de um circuito integrador com capacitores
chaveados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15 – Circuito para simular o ganho diferencial de um OTA . . . . . . . . . .
16 – Representação do ruído em um OTA (a) circuito (b) resposta em frequência
17 – Curva de transferência DC ideal de um OTA . . . . . . . . . . . . . . .
18 – Curva de transferência DC "real"de um OTA . . . . . . . . . . . . . . .
19 – Curva de transferência "real"AC de um OTA . . . . . . . . . . . . . . .
20 – Representação do tempo de resolução de um OTA . . . . . . . . . . . .
21 – Representação de dois sinais produzindo intermodulação de terceira
ordem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22 – Representação gráfica do cálculo de IIPn . . . . . . . . . . . . . . . . .
23 – Topologia de OTA escolhida para o projeto . . . . . . . . . . . . . . .
24 – Circuito equivalente do OTA de dois estágios . . . . . . . . . . . . . .
25 – Circuito equivalente do OTA com capacitor de compensação . . . . . .
26 – Representação gráfica do efeito do capacitor de compensação na resposta
em frequência do OTA . . . . . . . . . . . . . . . . . . . . . . . . . . .
27 – Circuito de teste usado para testar o OTA . . . . . . . . . . . . . . . .
28 – Circuito de espelho de corrente usado para gerar Vbias . . . . . . . . . .
29 – Curva de comportamento DC do OTA . . . . . . . . . . . . . . . . . .
14
15
17
18
18
19
20
21
22
22
23
24
25
26
28
29
30
30
31
32
34
34
37
38
38
39
46
46
48
Figura
Figura
Figura
Figura
Figura
Figura
Figura
Figura
30
31
32
33
34
35
36
37
–
–
–
–
–
–
–
–
Resposta em frequência do OTA, curvas de ganho e fase
Resposta transiente do OTA . . . . . . . . . . . . . . . .
Resposta de ruído do ota a) Visto de Vout b) Visto de Vin
Figura de ruído do OTA . . . . . . . . . . . . . . . . . .
Calculo do IIP3 do OTA . . . . . . . . . . . . . . . . . .
Circuito equivalente do modelo OTA do Cadence . . . .
Resposta em frequência do modelo do OTA . . . . . . .
Resposta transiente do modelo do OTA . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
49
49
50
50
51
52
53
54
Lista de tabelas
Tabela
Tabela
Tabela
Tabela
Tabela
Tabela
1
2
3
4
5
6
–
–
–
–
–
–
Dimensionamento dos capacitores do filtro IIR . .
Especificações do OTA . . . . . . . . . . . . . . .
Dimensionamento do OTA . . . . . . . . . . . . .
Dimensionamento do OTA após correções . . . .
Parâmetros do OTA utilizado de modelo . . . . .
Comparação do OTA com outros apresentados na
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
literatura
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
27
36
45
47
53
56
Lista de abreviaturas e siglas
FIR
Resposta ao Impulso de Duração Finita
IIR
Resposta ao Impulso de Duração Infinita
CAD
Conversor Analógico-Digital
EDCC
Equação de Diferença a Coeficientes Constantes
AMP-OP
Amplificadores Operacionais
OTA
Amplificadores Operacionais de Transcondutância
PSRR
Taxa de Rejeição da Fonte de Alimentação
CMRR
Taxa de Rejeição de Ganho de Modo Comum
AC
Corrente Alternada
DC
Corrente Direta
CMR
Faixa de tensão de modo comum na entrada (Common Mode Range)
GB
Frequência de ganho unitário (Gain-Bandwidth)
SR
Slew-rate
MOSIS
Metal Oxide Semiconductor Implementation Service
GICS
Group of Integrated Circuits and Systems
PSS
Análise periódica de estado estacionário (Periodic Steady-State Analysis)
PAC
Análise AC periódica (Periodic AC Analysis)
PNOISE
Análise periódica de ruído (Periodic Noise Analysis)
IIP3
Ponto de intercepção de terceira ordem
IMD
Distorções de intermodulação
Sumário
1
1.1
1.2
1.2.1
1.2.2
INTRODUÇÃO . . .
Contexto e motivação
Objetivos . . . . . . .
Objetivo geral . . . . . .
Objetivos específicos . .
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
12
12
12
12
12
2
2.1
2.1.1
2.1.2
2.1.3
2.1.4
2.1.5
REVISÃO BIBLIOGRÁFICA . . . .
Sinais e sistemas de tempo discreto
Sinais de tempo discreto . . . . . . . .
Sistemas de tempo discreto . . . . . . .
Resposta em frequência . . . . . . . . .
Transformada z . . . . . . . . . . . . .
Filtros . . . . . . . . . . . . . . . . . .
Filtro FIR . . . . . . . . . . . . . . . . .
Filtro IIR . . . . . . . . . . . . . . . . .
Filtros a Capacitores Chaveados . .
Elementos Importantes . . . . . . . . .
Capacitores . . . . . . . . . . . . . . . .
Switches . . . . . . . . . . . . . . . . .
AMP-OPs . . . . . . . . . . . . . . . .
Clocks não sobrepostos . . . . . . . . . .
Resistência equivalente . . . . . . . . .
Implementação analógica de um FIR . .
Implementação analógica de um IIR . .
Características dos OTA . . . . . . .
Ganho Diferencial . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
14
14
14
15
16
17
18
2.4
2.4.1
2.4.2
. . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
Taxa de rejeição de ganho de modo comum (CMRR) . . . . . . . . . . . .
Taxa de rejeição da fonte de alimentação (PSRR) . . . . . . . . . . . . . .
Ruído . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Resposta DC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Resposta AC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modelagem do sistema . . . . . . . . . . . . . . . . . . . . . .
Bloco ampop do cadence . . . . . . . . . . . . . . . . . . . . . . .
Ponto de intercepção de terceira ordem (IIP3) . . . . . . . . . . . .
3
PROJETO DO OTA . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.1.5.1
2.1.5.2
2.2
2.2.1
2.2.1.1
2.2.1.2
2.2.1.3
2.2.1.4
2.2.2
2.2.3
2.2.4
2.3
2.3.0.1
2.3.0.2
2.3.0.3
2.3.0.4
2.3.0.5
2.3.0.6
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
19
19
20
21
21
21
22
23
23
24
25
27
27
28
28
29
29
30
32
32
33
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3.1
3.2
3.3
3.4
3.5
Especificações do OTA desejado
Topologia . . . . . . . . . . . . .
Dimensionamento . . . . . . . .
Circuitos de suporte . . . . . . .
Resultados Obtidos . . . . . . . .
4
4.1
4.2
MODELO COMPORTAMENTAL DO OTA . . . . . . . . . . . . . . 52
Dimensionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Resultados Obtidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5
CONCLUSÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
REFERÊNCIAS
36
36
39
45
47
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
12
1 Introdução
1.1 Contexto e motivação
O mundo de hoje é conectado e os dispositivos eletrônicos fazem grande uso da
comunicação sem fio. Uma característica determinante para que estes dispositivos possam
estar conectados é a duração da bateria. Os circuitos de recepção wireless são alguns dos
elementos que mais consomem bateria nos dispositivos eletrônicos. Por isso, é importante
que estes componentes sejam altamente eficientes. Outra característica importante é a
flexibilidade, pois existem diversas frequências de portadoras e diferentes protocolos de
comunicação. Este conceito de flexibilidade na recepção RF é chamado de Radio Definido
por Software e faz parte de um sistema no qual os únicos componentes analógicos são
o conversor analógico/digital no receptor e o conversor digital/analógico no transmissor.
(BAGHERI et al., 2006).
A utilização de capacitores CMOS para o tratamento de sinais de radiofrequência
é interessante, pois permite uma resolução no tempo do sinal digital superior a resolução
da tensão do sinal analógico (STASZEWSKI et al., 2004).
A subamostragem, que consiste na amostragem do sinal em banda passante, é
uma técnica utilizada para simplificar a cadeia de recepção do sinal. Esta técnica faz a
conversão do sinal da banda passante para a banda base, de modo a reduzir os requisitos
do amostrador. Este trabalho faz parte de um estudo de sinais e sistemas para filtragem de
sinais em banda passante e do projeto de um amplificador operacional a transcondutância,
de baixo consumo, que será utilizado para compor um filtro de tempo discreto utilizando
capacitores chaveados, previamente apresentado por (LOLIS, 2011).
1.2 Objetivos
1.2.1 Objetivo geral
Projetar e simular um amplificador operacional (AMP-OP) que será utilizado em
um filtro de tempo discreto e modelar o amplificador projetado, com o intuito de reduzir o
tempo de processamento do mesmo.
1.2.2 Objetivos específicos
Para atingir este objetivo geral serão propostos os seguintes objetivos específicos:
Capítulo 1. Introdução
13
a) Estudar a teoria dos filtros de tempo discreto;
b) Estudar as especificações e a topologia de um amplificador operacional;
c) Projetar o esquemático do AMP-OP e simular separadamente cada estágio do
AMP-OP para então validar o amplificador completo;
d) Estudar os modelos prontos de AMP-OP do Cadence , que estão escritos em linguagem
Verilog-A;
14
2 Revisão Bibliográfica
2.1 Sinais e sistemas de tempo discreto
2.1.1 Sinais de tempo discreto
Este trabalho é sobre o projeto de um AMP-OP que irá operar no domínio de tempo
discreto. No processo de conversão de um sinal analógico para digital, o tempo discreto
é o processo intermediário, neste domínio o sinal analógico já foi amostrado no tempo
e precisa ser quantizado pelo conversor analógico-digital (CAD). Um sinal no domínio
discreto de tempo pode ser representado pelos valores de um sinal analógico no enésimo
valor do sinal no tempo nT . Onde n é um inteiro e T é o Período de amostragem.
x[n] = xn (nT ),
−∞ < n < ∞.
(2.1)
A figura 1 mostra um sinal qualquer no domínio discreto de tempo.
x[n]
2
1.5
1
0.5
−6
−4
−2
2
4
6 n
Figura 1 – Sinal em Tempo Discreto
Fonte: O autor, 2016
Uma forma de analisar um sinal no tempo discreto é tomar em conta a função
dirac no domínio de tempo contínuo:
δ[n] =
1, n6=0,
0, n=0.
(2.2)
Capítulo 2. Revisão Bibliográfica
15
E com isso podemos caracterizar o sinal em tempo discreto como a reconstrução
de um sinal pela sua resposta ao impulso conforme a equação 2.3.
∞
X
x[n] =
x[k]δ[n − k].
(2.3)
k=−∞
2.1.2 Sistemas de tempo discreto
Um sistema de tempo discreto é um sistema que converte a partir de um operador
matemático um sinal x[n] em uma saída y[n]. Como mostram a equação 2.4 e a figura 2.
y[n] = T {x[n]}.
T{.}
x[n]
(2.4)
y[n]
Figura 2 – Representação de um Sistema em Tempo Discreto
Fonte: O autor, 2016
A maior parte das aplicações de sistemas discretos no tempo são feitas em cima de
sistemas que são chamados de sistemas lineares invariáveis no tempo, pois estes possuem
algumas características que permitem um tratamento simplificado do sinal em questão.
A classe de sistemas lineares é definida pelo princípio da superposição. Para um
sistema ser considerado linear é preciso que para duas entradas x1[n] e x2[n] que possuem
respostas y1[n] e y2[n] as seguintes afirmações sejam validas:
T {x1 [n]} + T {x2 [n]} = y1 [n] + y2 [n].
(2.5)
aT {x1 [n]} = ay1 [n].
(2.6)
Estas equações podem ser generalizadas para muitas entradas. Desta maneira
podemos garantir que para uma entrada:
x[n] =
X
k
ak xk [n].
(2.7)
Capítulo 2. Revisão Bibliográfica
16
O sistema será linear se a saída for:
y[n] =
X
ak yk [n].
(2.8)
k
Um sistema é invariante no tempo se um delay ou deslocamento de tempo causar
uma mudança correspondente no sinal de saída. Como por exemplo o sinal a seguir:
y1 [n] =
n−n
X0
x[k1 ] = y[n − n0 ].
(2.9)
k1 =−∞
Um sistema linear invariante no tempo é um sistema que combina as duas propriedades acima. Quando um sistema satisfaz ambas as propriedades podemos dizer que sua
resposta é completamente caracterizada por sua resposta em frequência, o que faz com
que este sistema seja interessante para o processamento de sinais. Ao aplicarmos as duas
propriedades no sinal temos que a resposta ao impulso de um sistema linear é a seguinte:
y[n] =
∞
X
x[k]h[n − k].
(2.10)
k=−∞
A equação 2.10 é também conhecida como a convolução da soma e pode ser
representada pela equação 2.11. Partindo desta propriedade, é possível realizar sistemas,
sejam eles matemáticos ou práticos, que tratem um sinal x[n] para uma saída y[n] desejada,
a partir do sinal h[n]. O tratamento do sinal pode ser feito ainda em tempo discreto, em
hardware, antes da quantização do sinal, ou mesmo depois da quantização do sinal, através
de softwares que realizem as filtragens desejadas.
y[n] = x[n] ∗ h[n].
(2.11)
2.1.3 Resposta em frequência
O conceito de resposta em frequência de um sistema linear invariante no tempo
é essencialmente o mesmo para sistemas de tempo continuo e para sistemas de tempo
discreto. A representação de uma transformada de fourier em tempo discreto é a seguinte:
jω
H(e ) =
∞
X
h[k]e−jωk .
(2.12)
k=−∞
O sinal no domínio da frequência H(ejω ) é geralmente complexo e pode ser expresso
da seguinte maneira:
H(ejω ) = HR (ejω ) + jHI (ejω ).
(2.13)
Capítulo 2. Revisão Bibliográfica
17
ou em termos de magnitude e fase:
H(ejω ) = |H(ejω )|ej
6 H(ejω )
.
(2.14)
A partir da equação 2.15 podemos provar que H(ejω ) é periodica com periodo 2π.
e−j(ω+2π)n = e−jωn e−j2πn = e−jωn .
(2.15)
A figura 3 mostra a representação de um filtro passa baixa ideal no domínio da
frequência. Observa-se que próximo da frequência 0 e de seus múltiplos consecutivos de 2π,
o sinal possui resposta unitária, enquanto que para valores próximos de π (alta frequência),
o sinal possui resposta 0. A frequência ωc é a frequência de corte do filtro.
1
Figura 3 – Representação de um passa baixa em Tempo Discreto
Fonte: O autor, 2016
A partir do teorema de Nyquist, definido pela equação 2.16, que define que um sinal
amostrado no tempo, possuí banda passante B limitada em Fs /2, onde Fs é a frequência
de amostragem, podemos concluir portanto que para um sinal periódico no tempo, quando
analisado em frequência, seus múltiplos de π serão Fs /2.
B<
Fs
.
2
(2.16)
2.1.4 Transformada z
Uma forma mais eficiente de analisar sistemas de tempo discreto é a partir da
transformada z, a seguir a transformada z da equação 2.17.
X(z) =
∞
X
x[n]z −n .
(2.17)
k=−∞
Os multiplicadores z −n da transformada z podem ser interpretados como valores
atrasados em n amostras do sinal atual x[n]. A figura 4 representa um delay unitário de
um devido sinal x[n] no domínio z.
Capítulo 2. Revisão Bibliográfica
18
Figura 4 – Representação de um delay unitário no domínio z
Fonte: (OPPENHEIM; SCHAFER; BUCK, 1999)
2.1.5 Filtros
Os filtros de sistemas lineares invariantes no tempo podem ser generalizados na
Equação de Diferença a Coeficientes Constantes(EDCC) que está escrita no domínio do
tempo e em z nas equações 2.18 e 2.19.
y[n] −
N
X
ak y[n − k] =
k=1
M
X
bk x[n − k].
(2.18)
k=0
M
P
H[z] =
1
bk x[n − k]
k=0
.
N
P
−
ak y[n − k]
k=1
(2.19)
Esta equação define que o sinal de saída será uma combinação do sinal atual, com
os últimos valores do sinal na entrada e os últimos valores do sinal na saída do sistema.
Podemos observar melhor a partir da figura 5.
Figura 5 – Representação da EDCC no domínio z
Fonte: (OPPENHEIM; SCHAFER; BUCK, 1999)
Capítulo 2. Revisão Bibliográfica
19
2.1.5.1 Filtro FIR
Quando o sistema em questão possui apenas o numerando da equação 2.19, este
sistema é chamado de Filtro de Resposta ao Impulso de Duração Finita (FIR), sua função
de transferência é dada pela equação 2.20 . Como não possuímos divisor na equação de
transferência, então podemos garantir que qualquer sistema FIR será sempre estável. A
equação de transferência nunca irá tender ao infinito, logo sua resposta é de duração finita.
A resposta de um filtro FIR será sempre dependente do sinal de entrada e de seus ultimas
medições, porém independe das ultimas medidas na saída.
H[z] =
M
X
bk x[n − k].
(2.20)
k=0
A figura 6a mostra a representação em blocos de um FIR e a figura 6b mostra
a resposta típica de um filtro FIR no domínio da frequência com MN=4, ou seja, este
filtro utiliza das ultimas 4 medidas na entrada para produzir o sinal de saída. A partir da
figura 6b podemos claramente ver seu comportamento de passa baixa, tendo em vista que
perto da frequência 0 nosso ganho é 1 ( 0 dB) enquanto que perto de 0,5 da frequência de
amostragem, nosso sinal é próximo de 0 (-30 dB).
(a)
(b)
Figura 6 – Representação de um FIR e sua resposta em frequência |H(f )|2
Fonte: (LOLIS, 2011)
2.1.5.2 Filtro IIR
Se o filtro possui denominador na equação 2.19, este sistema terá Resposta ao
Impulso de Duração Infinita (IIR). E diferente do filtro FIR, este filtro pode ser instável
Capítulo 2. Revisão Bibliográfica
20
em situações na qual o denominador possa tender ao infinito. A equação 2.21 tem um
exemplo de IIR de primeira ordem. Em função do valor β o filtro pode ser instável(β > 1)
ou estável. A estabilidade é melhor explicada pelo Região de Convergência da função de
transferência(LOLIS, 2011). A figura 7 contém um exemplo de filtro IIR, onde o termo
N = 4, para diferentes valores de β. Pode-se observar que a resposta em frequência deste
filtro é mais seletiva que a dos filtros FIR.
M
P
H[z] =
bk x[n − k]
k=0
1 − βz −N +1
.
(2.21)
Figura 7 – Resposta em frequência |H(f )|2 de um filtro IIR
Fonte: (LOLIS, 2011)
2.2 Filtros a Capacitores Chaveados
A forma mais popular de fazer o tratamento de sinais em Tempo Discreto antes da
quantização pelo CAD é através de capacitores chaveados. Capacitores chaveados operam
como processadores de sinal em tempo discreto e podem ser facilmente analisados com
o uso da transformada z. Sua popularidade esta diretamente relacionada ao fato que
capacitores nos circuitos integrados são altamente precisos (na ordem de 0,1%), enquanto
que circuitos RC convencionais não atingem grandes precisões (podem variar até 20%)
(CARUSONE; JOHNS; MARTIN, 2011). O chaveamento é controlado a partir de sinais
de clock que também são altamente precisos.
Filtros a capacitores chaveados usam capacitores, AMP-OPs, switches e clocks não
sobrepostos. Estes serão brevemente explicados.
Capítulo 2. Revisão Bibliográfica
21
2.2.1 Elementos Importantes
2.2.1.1 Capacitores
Nos circuitos integrados convencionais, as capacitâncias são geralmente construídas
por duas trilhas condutivas levemente separadas, sua construção física esta representada
na figura 8a. Os capacitores possuem duas capacitâncias parasitas, conforme a figura 8b.
A capacitância Cp1 é chamada de capacitância da placa superior (top-plate capacitance) e
é da ordem de 20% de C. A capacitância Cp2 é chamada de capacitância da placa inferior
e é da ordem de 5% de C, muito menos relevante que Cp1 .
(a)
(b)
Figura 8 – Representação de um capacitor em um circuito integrado (a) construção física
(b) modelo elétrico
Fonte: (CARUSONE; JOHNS; MARTIN, 2011)
2.2.1.2 Switches
Os transistores MOSFET satisfazem as necessidades de switch para aplicações com
capacitores chaveados. Estes possuem alta resistência em off (GΩ) e baixa resistência em
on (< 5KΩ). Um switch pode ser feito com somente um transistor seja este NMOS ou
PMOS, conforme figuras 9a e 9b. Porem este tipo de ligação possui limitações devido a
tensão de threshold dos transistores, sendo que os sinais V1 e V2 na montagem da figura 9a
não podem ser inferiores a VDD − Vth e na figura 9b não podem ser inferiores a VSS + Vth .
Tendo como base a tecnologia usado neste trabalho, os valores de Vth são em torno de
0, 35V e VDD = 1, 2V, limitando o switch NMOS de 0 a 0, 95V o switch PMOS de 0, 35
a 1, 2V. Como forma de evitar esta limitações, pode-se utilizar de uma combinação dos
transistores NMOS e PMOS, conforme figura 9c, esta combinação é chamada de switch
CMOS.
Capítulo 2. Revisão Bibliográfica
(a)
22
(b)
(c)
Figura 9 – Representação de um switch com transistores MOSFET (a) NMOS (b) PMOS
(c) CMOS
Fonte: (CARUSONE; JOHNS; MARTIN, 2011)
2.2.1.3 AMP-OPs
Amplificadores operacionais (AMP-OPs) são o elemento chave no processamento
analógico de sinais. Quando o tratamento de sinais é feito em tempo discreto, estes também
são muito usados. O AMP-OP ideal da figura 10 nos mostra que este é um elemento que
amplifica um sinal diferencial nas entradas V+ e V− em função de um ganho A. Geralmente
os AMP-OPs são utilizados realimentados, então é importante que o ganho diferencial A
seja alto, para que quando a tensão em V+ esteja em Vss , o sinal em V− se comporte como
uma "massa virtual", ou seja, com um valor muito próximo de Vss .
Figura 10 – Símbolo e circuito equivalente de um AMP-OP ideal
Fonte: (MALOBERTI, 2001)
Os AMP-OPs em circuitos embarcados geralmente são blocos genéricos, com
ganho alto, alta impedância de entrada e baixa impedância de saída, porém em circuitos
integrados, não existe a necessidade de baixa impedância de saída, pois normalmente a
carga do circuito é uma capacitância e não uma carga resistiva. Deste modo, o ultimo
estágio(normalmente um buffer), que serve para garantir a baixa impedância de saída, é
suprimido, reduzindo assim o consumo geral do bloco. AMP-OPs com alta impedância de
saída também são chamados de amplificadores operacionais de transcondutância (OTA) e
neste trabalho quando estivermos tratando de AMP-OPs estes serão inevitavelmente de
Capítulo 2. Revisão Bibliográfica
23
baixa impedância de saída. As características de AMP-OPs reais serão melhor tratadas no
capítulo 2.3.
2.2.1.4 Clocks não sobrepostos
Pelo menos um par de clocks não sobrepostos é necessário para a realização de
circuitos com capacitores chaveado. O termo não sobrepostos remete ao fato de que, ambos
os sinais não podem ficar em alto ao mesmo tempo, para evitar a perca de carga. A figura
11a mostra em um gráfico dois sinais de clock φ1 e φ2 não sobrepostos e a figura 11b
mostra um circuito prático para a realização destes dois sinais usando portas lógicas.
(a)
(b)
Figura 11 – Representação de 2 clocks não sobrepostos (a) 2 sinais de clock (B) realização
prática dos clocks
Fonte: (CARUSONE; JOHNS; MARTIN, 2011)
2.2.2 Resistência equivalente
A grande vantagem de trabalharmos com circuitos chaveados é o fato de podemos
substituir os resistores do circuito. Isso é possível, pois podemos reproduzir o comportamento de um resistor a partir de um capacitor chaveado, como mostra a figura 12.
A equação 2.22 é o valor de carga em um capacitor. As frequências φ1 e φ2 na
figura 12a são clocks complementares não sobrepostos. Em um primeiro momento, quando
φ1 está em alto, carrega-se o capacitor C1 com a tensão V1 . Em um segundo momento,
quando φ2 esta alto, transfere-se a tensão de C1 para V 2.
Qx = Cx Vx .
(2.22)
A carga será transferida para o capacitor a cada ciclo de clock, o que nos possibilita
calcular a corrente média que passará pelo capacitor, conforme a equação 2.23.
Imed =
C1 (V1 − V2 )
.
T
(2.23)
Capítulo 2. Revisão Bibliográfica
24
∆Q = C1 (V1 − V2 ) cada ciclo de
clock
Req =
T
C1
(b)
(a)
Figura 12 – Representação de um resistor com capacitores chaveados (a) circuito (b)
resistor equivalente
Fonte: (CARUSONE; JOHNS; MARTIN, 2011)
A corrente equivalente em um resistores é a seguinte:
Ieq =
V1 − V2
.
Req
(2.24)
Ao igualar as duas equações chega-se na relação da equação 2.25, que é a resistência
equivalente mostrada na figura 12b.
Req =
T
1
=
.
C1
C1 fs
(2.25)
Uma forma de analisar esta relação é imaginar que caso aumentemos a frequência
de clock, uma maior corrente será transferida para a saída. Caso a capacitância seja
aumentada, também haverá uma maior transferência de corrente para a saída.
2.2.3 Implementação analógica de um FIR
É possível implementar um filtro FIR apenas com capacitores chaveados, seguindo
do princípio de utilizar cada capacitor para carregar um período anterior do sinal de
entrada. A figura 13 mostra um filtro FIR de ordem 4 utilizando 4 capacitores chaveados.
A saída do circuito é amostrada a cada 4 amostras do sinal de entrada, realizando
uma operação equivalente a formula 2.20 com M = 4, conforme equação 2.26.
1
H(z) = P (C1 + C2 z −1 + C3 z −2 + C4 z −3 ),
Ci
Cn
bn = P .
Cn
n
(2.26)
Capítulo 2. Revisão Bibliográfica
25
Figura 13 – Circuito de um FIR de 4a ordem com capacitores chaveados
Fonte: (LOLIS, 2011)
2.2.4 Implementação analógica de um IIR
Para melhorar a seletividade dos filtros FIR, pode ser adicionado em seguida de
um estágio FIR um filtro IIR (SUN, 2006). O filtro IIR é um filtro que realiza a soma o
sinal atual com a saída anterior. Para isso é preciso que exista um loop de feedback do
sinal de saída. O circuito integrador é um circuito que realiza essa tipo de operação. Na
figura 14 temos um circuito integrador realizado com capacitores chaveados. Este funciona
de maneira similar ao integrador com resistores, os capacitores CA e Cf b2 operam como
resistores.
Em um primeiro momento o capacitor CA é carregado, em um segundo momento,
CA é conectado ao amplificador operacional, como a tensão V− é aproximadamente igual a
V+ (uma massa virtual), a carga que estava em CA é diretamente transferida para a saída.
O capacitor Cf b2 é descarregado enquanto CA carrega, este tem a função de controlar o
ganho total do sistema, podendo ser retirado se não existe a necessidade de ganho no
sistema.
A partir da equação de conservação de carga 2.22 é possível calcular a a diferença
de carga no circuito quando o switch S2 é fechado, conforme equação 2.27.
Vdec (n) · CA + 0 · (Cf b1 + Cf b2 ) = −Vout (n) · (Cf b1 + Cf b2 )
Capítulo 2. Revisão Bibliográfica
26
Figura 14 – Circuito de um IIR a partir de um circuito integrador com capacitores chaveados
Fonte: (LOLIS, 2011)
Vout (n)
CA
.
=−
Vdec (n)
Cf b1 + Cf b2
(2.27)
Quando o switch S2 abre, podemos dizer que a carga em Vout (n) é igual a Cf b1 /(Cf b1 +
Cf b2 ).
Se aplicarmos a conservação de carga neste caso temos:
Vdec (n + 1) · CA + Vout (n) ·
Cf b1
· (Cf b1 + Cf b2 ) = −Vout (n + 1) · (Cf b1 + Cf b2 )
Cf b1 + Cf b2
Vout (n + 1) = Vout (n) ·
Cf b1
CA
−
Vdec (n + 1).
Cf b1 + Cf b2 Cf b1 + Cf b2
(2.28)
A transformada z da equação 2.28 é a seguinte:
H(z) =
Vout (z)
CA
1
=−
·
,
Vdec (z)
Cf b1 + Cf b2 1 − β · z −1
β=
Cf b1
.
Cf b1 + Cf b2
(2.29)
É possível também ligar em série o filtro FIR com o IIR para assim conseguir uma
melhor seletividade de frequência.
O ganho em dB de um filtro IIR de um polo pode ser dado pela equação 2.30, onde
r = β. Se igualarmos H(ejω )dB = 3dB, podemos portando achar a frequência de corte ωc
Capítulo 2. Revisão Bibliográfica
27
de um filtro para um determinado valore de β, e vice versa.
H(ejω )dB = −10log10 [1 + r2 − 2r(cos(ω))]
(2.30)
Um exemplo prático de dimensionamento dos capacitores do filtro IIR foi feito. A
frequência de corte é de 3 MHz e a frequência de amostragem de 25 MHz. O β calculado foi
de 0,9, então a partir da equação 2.29 o valor de Cf b2 foi calculado para um Cf b1 = 200fF.
O valor de CA foi então calculado assumindo o ganho da função igual a 1. Os valores do
dimensionamento encontram-se na tabela 1.
Tabela 1 – Dimensionamento dos capacitores do filtro IIR
Dimensionamento
Cf b1
Cf b2
CA
Rout
Fonte: O autor
Valor
20f F
200f F
220f F
50Ω
O objetivo era que fossem feitas simulações de sinal periódico (PSS, PAC e PNOISE),
com a frequência do clock amostragem de 25 Mhz. O curto período de tempo impossibilitou
que estas simulações fossem feitas.
2.3 Características dos OTA
Na sessão 2.2.1.3 foi citado que espera-se de um OTA que este tenha um alto ganho.
Algumas das características de performance que um OTA serão discutidas a seguir. O
design de um OTA nem sempre permite que todas as características sejam optimizadas.
Para que possamos atingir as especificações desejadas, muitas vezes precisamos abrir mão
de algumas características de performance que não prejudiquem muito o circuito para o
qual este será utilizado. Como este trabalho é baseado no projeto de um OTA, as topologias
e o dimensionamento do OTA serão tratados em um capítulo a parte (Capítulo 3).
2.3.0.1 Ganho Diferencial
O ganho diferencial (Av ) é o ganho mais alto atingido pelo amplificador, ao
colocarmos um sinal pequeno na entrada e medirmos a saída. Este só pode ser medido
se compensarmos o offset para que este funcione em seu melhor ponto de operação. A
figura 15 possui um circuito que possibilita o teste do ganho diferencial de um OTA. As
resistências possuem o mesmo valor, para que o circuito opere em ganho unitário. Observe
que para altas frequências os resistores se comportam como um circuito aberto. Porém,
Capítulo 2. Revisão Bibliográfica
28
para fins de simulação os resistores podem ser bem altos, para que a frequência de transição
para alta frequência aconteça com valores pequenos. Desta forma, espera-se um alto ganho
na saída. Os valores de típicos de Av variam entre 60 − 80 dB. Para situações de alta
precisão estes valores podem ser maiores e para operações em ganho unitário, para reduzir
o consumo, este ganho pode ser inferior.
Figura 15 – Circuito para simular o ganho diferencial de um OTA
Fonte: (MALOBERTI, 2001)
2.3.0.2 Taxa de rejeição de ganho de modo comum (CMRR)
Se colocarmos um sinal de pequenos sinais de mesmo valor nos terminais V+ e
V− do circuito, para um OTA ideal, não haverá sinal algum na saída. Devido a erros no
processo de fabricação dos circuitos integrados, existe um ganho de modo comum (Acm ),
que varia de acordo com a tecnologia escolhida e com o layout dos transistores. Este ganho
é projetado para ser o menor possível. Um fator de mérito para determinar a qualidade de
um OTA é a taxa entre o ganho diferencial e o ganho de modo comum. o Acm tem valores
típicos de 10 − 30dB.
CM RR =
Av
Acm
(2.31)
2.3.0.3 Taxa de rejeição da fonte de alimentação (PSRR)
Se aplicarmos um sinal de pequenos sinais na alimentação positiva ou negativa do
circuito, haverá um sinal na saída do amplificador com uma amplificação (Aps+ ou Aps− ).
A taxa de rejeição da fonte de alimentação (PSRR) é a taxa entre o ganho diferencial e o
ganho na alimentação do OTA. Isto ocorre pois a tensão aplicada aos pinos do circuito não
é exatamente a tensão que chega para alimentar o OTA. Existem indutâncias e resistências
nas trilhas que espalham a tensão de alimentação pelo circuito. Além disso, como estamos
tratando de sinais de circuitos mistos, exitem também surtos na alimentação vindos da
Capítulo 2. Revisão Bibliográfica
29
alta frequência de chaveamento nas partes digitais do sistema, este ruído é chamado de
Ldl/dt.
2.3.0.4 Ruído
O ruído em um OTA pode ser representado por uma fonte de corrente na entrada
do circuito, conforme figura 16a. O ruído produzido por um OTA é majoritariamente
ruído branco e ruído 1/f . A frequência na qual o ruído 1/f atinge o valores médios do
ruído branco é chamado de frequência de corner. O ruído branco possui valor típico de 50
√
nV/ Hz. A frequência de corner é dependente da tecnologia em si, mas pode variar de 1
kHz a 10 Khz.
(a)
(b)
Figura 16 – Representação do ruído em um OTA (a) circuito (b) resposta em frequência
Fonte: (MALOBERTI, 2001)
2.3.0.5 Resposta DC
A figura 17 mostra como se comporta idealmente um OTA, se variarmos a tensão
DC nas entradas Vp e Vn . A tensão VOL é a tensão de saturação quando Vn > Vp e a tensão
VOH é a tensão de saturação quando Vp > Vn . Na prática esta curva só seria possível, se
nosso amplificador tivesse ganho infinito, pois o ganho é a inclinação da curva entre os
dois valores de saturação, conforme equação 2.32.
VOH − VOL
∆V →0
∆V
Ganho = Av = lim
(2.32)
Na prática esta curva é inclinada em valores entre as saturações, mas além disso
temos um offset, que na prática causa um deslocamento na curva, conforme figura 18. A
tensão de offset portanto é VOS , que é de tensão aplicada na diferença das entradas para
que a tensão na saída seja 0 V.
As tensões VOL e VOH são chamadas de swing da tensão na saída (output swing)
e são inferiores a Vdd e Vss . Já as tensões VIL e VIH são chamadas de faixa de tensão de
modo comum na entrada (Common Mode Range - CMR).
Capítulo 2. Revisão Bibliográfica
30
Figura 17 – Curva de transferência DC ideal de um OTA
Fonte: (ALLEN; HOLBERG, 2002)
Figura 18 – Curva de transferência DC "real"de um OTA
Fonte: (ALLEN; HOLBERG, 2002)
2.3.0.6 Resposta AC
A função de transferência de um OTA, costuma ter uma combinação de polos
e zeros. A figura 19 mostra uma curva de transferência típica de um OTA. Existe a
necessidade de um polo dominante para garantir a estabilidade do sistema. A frequência
onde o ganho atinge 0 dB é chamada de frequência de ganho unitário (GB).
Cada polo adicionado na função de transferência causa uma alteração de fase de
90◦ , para garantir que o sistema fique estável, é necessário que na frequência de ganho
unitário o sistema tenha fase próxima de 90◦ (conhecida como margem de fase). Valores
de até 60◦ graus de margem de fase ainda garantem boa estabilidade ao sistema. Quando
a margem de fase é muito baixa o tempo de resolução do sistema para uma alteração
brusca na entrada pode interferir no funcionamento, o tempo de resolução é representado
pela figura 20. Portanto é interessante que os polos não dominantes ω2, ω3 estejam bem
distantes de ω1, para garantir que o deslocamento de fase causado por eles não interfira
Capítulo 2. Revisão Bibliográfica
31
Figura 19 – Curva de transferência "real"AC de um OTA
Fonte: (ALLEN; HOLBERG, 2002)
de maneira drástica na margem de fase. Caso o sistema venha a operar realimentado, o
sistema não precisa respeitar a margem de fase superior a 60◦ , se este operar em frequências
inferiores ao ganho unitário, estando este limitado a fase na frequência na qual o circuito
está operando.
O slew-rate também é uma característica importante para o projeto de OTAs, e é
definido pela capacidade máxima de fornecimento de corrente e é definido geralmente em
V/µs. Ainda analisando a figura 20, dela podemos extrair o slew-rate, que é a inclinação
da curva antes de atingir estabilidade, logo que exista uma mudança brusca no sinal na
entrada do amplificador.
Capítulo 2. Revisão Bibliográfica
32
Figura 20 – Representação do tempo de resolução de um OTA
Fonte: (ALLEN; HOLBERG, 2002)
2.4 Modelagem do sistema
O Group of Integrated Circuits and Systems (GICS), do curso de engenharia elétrica
da UFPR conta com um convênio com a projeto de fabricação de circuitos integrados
Metal Oxide Semiconductor Implementation Service (MOSIS). O MOSIS é um serviço
que busca agrupar múltiplos designs em um único wafer de modo a baratear os custos
de produção dos circuitos integrados. Seu foco é voltado para protótipos e este possui
convênios com finalidade educacional, do qual o GICS faz parte. Eles também fornecem o
design kit da tecnologia em questão. Uma das tecnologias que o GICS possui acesso é a
Global Foundries 130nm, que foi a tecnologia escolhida para este projeto. As simulações
são feitas com o software de CAD Virtuoso da Cadence.
2.4.1 Bloco ampop do cadence
A estratégia usada será a de projetar um OTA, usando os modelos de transistor
fornecidos pela tecnologia, em seguida extrair as características principais do amplificador e simular fazendo o uso do bloco analógico de amplificador (ampop) da biblioteca
"adhlLib"fornecido pela Cadence, onde os parâmetros obtidos pelo modelo original serão
aplicados no bloco. As mesmas simulações serão repetidas com o bloco fornecido pela
Cadence, e comparadas com o bloco completo, para validar o modelo.
O bloco de ampop do Cadence é escrito em Verilog-A e possui os seguintes parâmetros:
• Ganho;
Capítulo 2. Revisão Bibliográfica
33
• Frequência de ganho unitário;
• Resistência de entrada (rin);
• Tensão de offset;
• Corrente de entrada (ibias);
• Corrente máxima (iin_max);
• Resistência de saída (rout);
• limitação de tensão na saída (vsoft);
É visível que este bloco não possui informações dos polos não dominantes, nem de
margem de fase, o que pode vir a prejudicar nossa resposta, porem devido ao curto tempo
deste trabalho, este será o modelo usado. Caso seja necessário o desenvolvimento de um
bloco mais complexo, este pode vir a ser um incentivo para a continuação deste trabalho.
2.4.2 Ponto de intercepção de terceira ordem (IIP3)
O ponto de intercepção de terceira ordem (IIP3) faz parte das características de
intermodulação dos dispositivos analógicos e é uma figura de mérito que representa a
linearidade do dispositivo. Se temos dois sinais fortes em frequências muitos próximas,
estes produzem distorções de intermodulação (IMD). O ganho não linear de um bloco
pode ser modelado por um polinômio conforme equação 2.33.
y0 = a0 + a1 xi + a2 x2i + a3 x3i + ... =
∞
X
ak xki
(2.33)
k=0
Esta função possui geralmente característica de função impar, portanto os valores
de k impar possuem amplitude dominante com relação aos valores de k pares. O mais
importante termo desta equação é o valor de terceira ordem. Se pegarmos a figura 21
como exemplo, tempos dois sinais próximos um do outro, estes produzem uma distorção
de terceira ordem. A distorção de intermodulação de terceira ordem (IMD3) é representa
pelo ∆3 . O interesse é que o IMD3 seja pequeno, consequentemente o sistema em questão
será altamente linear. A intermodulação de terceira ordem pode cair em uma faixa do
espectro que prejudique outros canais do espectro.
Se aumentarmos o valor dos sinais principais, pode-se traçar as curvas dos sinais
de entrada e dos IMD3, antes do circuito saturar, ambos se comportam como retas
acendentes, conforme figura 22. Se extrapolarmos ambas as retas, pode-se encontrar o
ponto de interceptação das duas curvas, quando o sinal de entrada em teoria produziria
Capítulo 2. Revisão Bibliográfica
34
Figura 21 – Representação de dois sinais produzindo intermodulação de terceira ordem
Fonte: (GU, 2006)
Figura 22 – Representação gráfica do cálculo de IIPn
Fonte: (GU, 2006)
Capítulo 2. Revisão Bibliográfica
35
o equivalente a sua componente de terceira ordem, este é o que chamamos de ponto de
intercepção de terceira ordem (IIP3).
A formula para calcularmos o IIP3 a partir de um valor de IMD3 está na equação
2.34, onde S é a potencia do sinal de entrada:
1
IIP3 = (3S − IM D3 )
2
(2.34)
36
3 Projeto do OTA
Este trabalho consiste no projeto de um OTA que será utilizado para validar o
integrador de um filtro IIR. Tem-se a pretensão de utilizar este OTA para validar o filtro
completo da tese (LOLIS, 2011). Foi desta que algumas das especificações do OTA foram
extraídas.
3.1 Especificações do OTA desejado
O trabalho será um OTA para validar o circuito da figura 14. A frequência de
amostragem é de 25 MHz. Os capacitores serão calculados para a frequência de corte de 3
MHz. Não existe a necessidade de um ganho alto, pois o circuito irá operar realimentado, o
valor estabelecido de ganho minimo do OTA em malha aberta é de 30 dB, que é um valor
baixo se comparado com o estado da arte. Pensando nisso, o foco foi em baixo consumo,
com corrente inferior a 100 µA. A tensão de alimentação é de 1, 6 V que é a tensão padrão
da tecnologia. A margem de fase foi definida maior que 60◦ .
Tabela 2 – Especificações do OTA
Especificação
Frequência de amostragem (fs )
Frequência de corte do filtro (fc )
Ganho
Frequência de ganho unitário (GB)
Consumo de corrente
Tensão de alimentação
Margem de fase
Fonte: O autor
Valor
25 MHz
3 MHz
>30 dB
>25 MHz
>100 µA
1, 6 V
>50◦
3.2 Topologia
A topologia escolhida para o OTA é a da figura 23. A motivação da escolha foi
que este é um circuito de baixa complexidade, devido ao curto tempo para este trabalho,
era importante que uma topologia simplificada fosse escolhida. Esta é uma topologia de
dois estágios, onde o primeiro estágio é constituído por um par diferencial, este par é
desbalanceado por um espelho de corrente formado por M 3 e M 4, para transformar as 2
entradas em uma saída. Portanto, devido ao espelho de corrente, a corrente IDS em M 4 é
equivalente a corrente em M 1. A saída do primeiro estágio, que é o nó entre M 4 e M 2, é a
Capítulo 3. Projeto do OTA
37
diferença de corrente entre M 1 e M 2. O segundo estágio é chamado de fonte comum onde
a entrada do amplificador é a base do transistor M 6, e o transistor M 7 se comporta como
fonte de corrente. Opta-se por um segundo estágio simples para melhorar a amplitude do
sinal de saída do amplificador.
Figura 23 – Topologia de OTA escolhida para o projeto
Fonte: (ALLEN; HOLBERG, 2002)
O capacitor Cc é chamado de capacitor de compensação e ele é necessário, pois
cada estágio do circuito insere um polo na função de transferência e os polos encontram-se
muito próximos um do outro, quando os polos estão muito próximos um do outro, é difícil
garantir os 60◦ de margem de fase pois o segundo polo desloca a fase mais 90◦ , se isto
ocorre antes do ganho unitário, a margem de fase fica próxima de 0◦ . A figura 24 representa
o circuito equivalente de pequenos sinais sem o capacitor de compensação. Os polos da
função deste circuito são as equações 3.1 e 3.2 e possuem a mesma ordem de gradeza,como
estamos tratando de transistores com W/L parecidos, os valores tendem a ser próximos
um do outro.
p01 =
p02 =
−1
RI CI
(3.1)
−1
RII CII
(3.2)
A técnica de adicionar um capacitor entre o primeiro e o segundo estágio é chamado
de compensação de Miller, observamos como fica o circuito equivalente pequenos sinais
quando adiciona-se o capacitor, na figura 25.
Capítulo 3. Projeto do OTA
38
+
+
+
Vin
VI
g mIVin
g mIIVI
RI CI
-
Vo
RII CII
-
Figura 24 – Circuito equivalente do OTA de dois estágios
Fonte: O autor
Cc
+
+
+
Vin
VI
g mIVin
RI CI
-
g mIIVI
-
Vo
RII CII
-
Figura 25 – Circuito equivalente do OTA com capacitor de compensação
Fonte: O autor
Ambos os polos da função são alterados com o capacitor, os novos polos são as
equações 3.3 e 3.4. Quanto temos CII muito maior que Cc o segundo polo pode ser reduzido
para aproximadamente a equação 3.5. A figura 26 mostra o que acontece com a resposta
em frequência do circuito quando acrescenta-se o capacitor de compensação. Na prática
o primeiro polo é reduzido em frequência e o segundo polo é aumentado, portante é
preciso que o capacitor de compensação seja escolhido de modo que os polos estejam
suficientemente afastados um do outro para que a margem de fase desejada seja garantida.
A função também apresenta um zero, no semi-plano direito, que pode ser calculado pela
equação 3.6 e precisa ser projetado muito maior que GB para garantir a estabilidade do
sistema.
−1
gmII RI RII Cc
(3.3)
−gmII Cc
CI CII + CII Cc + CI Cc
(3.4)
p1 =
p2 =
Capítulo 3. Projeto do OTA
39
−gmII
p2 ∼
=
CII
z1 =
gmII
Cc
(3.5)
(3.6)
Figura 26 – Representação gráfica do efeito do capacitor de compensação na resposta em
frequência do OTA
Fonte: (ALLEN; HOLBERG, 2002)
3.3 Dimensionamento
Para o dimensionamento dos transistores de nosso OTA, primeiro é preciso levar
em consideração algumas formulas essenciais para o cálculo. O dimensionamento é baseado
nos valores de transcondutância gm e de admitância gds dos transistores. As formulas
usadas no cálculo são aproximadas, na prática o simulador leva em conta para a simulação
dos transistores, modelos complexos. Os cálculos iniciais serão feitos para se obter uma
aproximação dos valores de W/L dos transistores, para que depois em simulação, seja
possível ajustar um pouco os valores.
A equação 3.7 e a equação 3.8 são os valores de gm e gds usados nos cálculos. Porém
evitou-se usar o valor de gds aproximado, contatou-se com as primeiras simulações, que a
aproximação do gds destoa muito do valor atingido em simulação.
gm ∼
=
K 0W
2K 0 (W/L)|ID | ∼
(VGS − VT )
=
L
q
(3.7)
Capítulo 3. Projeto do OTA
40
gds ∼
= λID
(3.8)
As varáveis destas equação são as seguintes:
• K 0 = parâmetro de transcondutância [ A/V2 ]
• Vt = tensão de threshold (limiar) do transistor [ V ]
• ID = corrente de dreno do transistor [ A ]
• VGS = tensão entre gate e fonte (source) do transistor [ Vgs ]
• λ = parâmetro de modulação do comprimento do canal [ V−1 ]
• µ0 = mobilidade de portadores de canal [ cm2 /V.s ]
• Cox = capacitância por unidade de área do óxido no gate do transistor [ F/cm2 ]
• ox = permissividade do SiO2 [ F/cm ]
• tox = espessura do óxido [ cm ]
O K 0 é um valor que varia entre os transistores PMOS e NMOS e é dependente da
tecnologia, seu valor pode ser calculado pela formula 3.9 e enquanto Cox é dependente da
tecnologia, µ0 depende do tipo do canal do transistor ( P ou N), comprovando que este
depende do tipo de transistor. Cox é calculado pela formula 3.11, onde 0 é uma constante
e tox é dependente da tecnologia. Outro parâmetro de transcondutância usado nos cálculos
é o β que é calculado pela formula 3.10.
K0 ∼
= µ0 Cox
β = (K 0 )
W
L
Cox =
[ A/V 2 ]
ox
tox
(3.9)
(3.10)
(3.11)
Para simplificar a notação Si = Wi /Li = (W/L)i para se referir a proporção entre
o W que é a largura do canal e L que é o comprimento do canal do transistor e i refere-se
a notação numérica dos transistores do circuito da figura 23.
O dimensionamento segue o procedimento apresentado por (ALLEN; HOLBERG,
2002). Assume-se os seguintes valores de transcondutância e admitância:
Capítulo 3. Projeto do OTA
41
• gmI = gm1 = gm2
• gmII = gm6
• 1/RI = (gds2 + gds4 )
• 1/RII = (gds6 + gds7 )
A seguir as relações importantes do circuito da figura 23 :
Slew-rate:
I5
Cc
(3.12)
Av1 =
gm2
gds2 + gds4
(3.13)
Av2 =
gm6
gds6 + gds7
(3.14)
SR =
Ganho do primeiro estágio:
Ganho do segundo estágio:
Frequência de ganho unitário:
GB =
gm2
Cc
Polo do estágio de saída:
p2 =
Zero do semi-plano direito:
z1 =
[ rad/s ]
(3.15)
−gm6
CL
(3.16)
gm6
Cc
(3.17)
Tensão de modo comum máxima:
Vin(max)
I5
= VDD −
β3
!1/2
− |VT 03(max) | + VT 1(min)
(3.18)
+ VT 1(max) + VDS5 (sat)
(3.19)
Tensão de modo comum mínima:
Vin(min) = VSS
I5
−
β1
!1/2
Tensão de saturação:
VDS (sat) =
2IDS
β
!1/2
(3.20)
Capítulo 3. Projeto do OTA
42
Para este procedimento de dimensionamento as seguintes especificações precisam
ser conhecidas:
• Frequência de ganho unitário (GB)
• Faixa de tensão de modo comum na entrada (CMR)
• Capacitância de carga (CL )
• Slew-rate (SR)
• Swing da tensão de saída
O ganho diferencial Av e o consumo de corrente Itotal serão consequência dos valores
estabelecidos pelas outras especificações.
Para que se obtenha 60◦ de margem de fase, o polo 2 precisa ser colocado numa
frequência 2,2 vezes maior que GB e o zero precisa estar a pelo menos 10 vezes a frequência
GB. Assumindo esta relação podemos, a partir formula de GB(equação 3.15) e da formula
do zero(equação 3.17), chegar na seguinte condição:
gm6
gm2
> 10
Cc
Cc
(3.21)
também podemos derivar a equação 3.22, com as equações 3.15 e 3.16.
gm6
gm2
> 2.2
C2
Cc
(3.22)
Se combinarmos as duas equações, chegamos na relação da equação 3.23. Portanto,
com a especificação de CL pode-se calcular Cc . Com Cc e o slew-rate pode-se calcular I5 ,
conforme equação 3.24.
Cc > (2, 2/10)CL
(3.23)
I5 = SR(Cc )
(3.24)
A relação do transitor M 3 pode ser calculada a partir da formula da tensão de
modo comum mínima, conforme equação 3.25.
S3 = (W/L)3 =
(K30 )[VDD
I5
− Vin(max) − |VT 03(max) | + VT 1(min) ]2
(3.25)
Capítulo 3. Projeto do OTA
43
Como temos GB e Cc , podemos calcular gm2 , conforme equação 3.26. E usando a
equação 3.7 pode-se calcular a proporção de M 2, conforme equação 3.27.
gm2 = GB(Cc )
(3.26)
2
gm2
S2 = (W/L)2 =
(K20 )(I5 )
(3.27)
Pode-se calcular a tensão VDS5 com a equação de tensão de modo comum máxima.
E então calcular a proporção de M 5 conforme equações 3.28 e 3.29.
VDS5 = Vin(min) − VSS
I5
−
β1
S5 = (W/L)5 =
!1/2
− VT 1(max)
2(I5 )
0
K5 (VDS5 )2
(3.28)
(3.29)
Com a equação 3.22 pode-se calcular gm6 .
gm6 = 2.2(gm2 )(CL /Cc )
(3.30)
Se assumirmos que VDS6 = VDS6 (min) = VDS6 (sat) = VDD − Vout (max) pode-se
calcular S6 .
S6 = (W/L)6 =
gm6
0
K6 VDS6 (sat)
(3.31)
Podemos calcular a corrente I6 com as equações 3.32 e 3.33. Escolhe-se a maior
das duas correntes. Se a corrente maior for a da equação 3.32, é preciso recalcular S6 a
partir da equação 3.33.
I6 =
2
gm6
(2)(K60 )(W/L)6
(3.32)
(W/L)6
I1
(W/L)3
(3.33)
I6 =
A relação S7 pode ser calculada com a equação 3.34.
S7 = (W/L)7 = (W/L)5
I6
I5
(3.34)
Para dimensionar os transistores foi feita uma primeira simulação DC do circuito,
todos com L mínimo (120nm) e com W qualquer, para que fossem extraídos os valores de
Capítulo 3. Projeto do OTA
44
VT 1 (max), VT 1 (min), VT 03 (max). Os valores (max) foram extraídos quando a diferença
de V + e V− é máxima (1, 6 V) e o valor (min) quando a diferença é mínima (0 V). Os
valores de Kp0 e Kn0 foram calculados a partir da formula 3.9 onde o µ0p , µ0n e tox foram
extraídos do modelo do transistor para da tecnologia e a constante ox = 3, 45 ∗ 10−11 F/m.
Os valores usados foram os seguintes:
• Kn0 = 115 µA/V2
• Kp0 = 516 µA/V2
• vt1 (max) = 470 mV
• vt1 (min) = 402 mV
• vt03 (max) = 402 mV
• CL = 2 pF
• Slew − rate = 40 V/µs
• GB = 40 MHz
• Vin (max) = 1, 5 V
• Vin (min) = 0, 7 mV
• Vds6 = 100 mV
Algumas observações podem ser feitas:
• O slew-rate foi escolhido, imaginando que o circuito chaveie a tensão nominal 1, 6 V
na frequência de 25 MHz, bem acima do que irá acontecer na prática, pois sabe-se
que o circuito integrador ira carregar apenas a variação de carga de um período a
outro, esse valor foi mantido, pois este influencia a corrente do primeiro estágio, que
é muito inferior a corrente do segundo estágio, não afetando de maneira drástica o
consumo real do circuito.
• A tensão de modo comum mínima Vin (min) está bem acima do valor ideal (deveria
estar próxima a GND) para viabilizar o cálculo, pois este influencia inversamente S3 ,
caso este esteja pequeno demais, a corrente I6 sobe para valores muito altos devido
a equação 3.33.
• GB está acima dos 25 MHz para que o circuito possa operar com um pouco de ganho
se for preciso.
Os valores calculados estão na tabela 3, referentes ao circuito da figura 23.
Capítulo 3. Projeto do OTA
45
Tabela 3 – Dimensionamento do OTA
Dimensionamento Valor
S1
1,34
S3
15,3
S5
13,6
S6
96
S7
42,7
I5
55 µA
I7
17,6 µA
Fonte: O autor
3.4 Circuitos de suporte
Para testar o OTA, foi utilizado o circuito da figura 27. Neste caso, o amplificador
está em malha aberta e precisa de correção de offset para funcionar em ganho máximo,
portanto foi feito primeiro uma simulação DC para extrair o offset, para que então as
outras simulações fossem feitas. Foram feitos 4 testes a seguir a configuração de cada teste:
• Resposta DC: fontes: DC: V 1 = sweep de 0 a 1, 6 V, V 2 = 0 V;
• Resposta AC e Ruído: fontes: DC: V 1 = (0, 8 V + offset), V 2 = 0, 8 V; AC: V 2 = 1
V;
• Transiente: fontes: DC: V 1 = 0, 8 V + offset, V 2 = 0, 8 V; VSIN: V 2 = [VP P = 1, 6
V, f = 1 MHz];
A tensão Vbias usada para gerar as correntes I7 e I5 foi gerada a partir de um
espelho de corrente conforme figura 28. Nota-se que as proporções de M 7 e M 5 ja foram
calculadas para que com a mesma tensão Vbias , ambos forneçam as correntes calculadas.
A proporção W/L do transistor M pol é igual a M 7, e a corrente I7 é a corrente que
deseja que passe por M 7. Sabe-se que este espelho de corrente não é preciso, pois devido
aos efeitos de modulação do canal, as tensões VGS de M pol e M 7 acabam não sendo
exatamente iguais, portanto sabe-se que os valores de W/L de M pol terão de ser ajustados
para fornecer a corrente calculada no dimensionamento.
Capítulo 3. Projeto do OTA
46
U1
C1
V1
V2
Figura 27 – Circuito de teste usado para testar o OTA
Fonte: O autor
I7
Mpol
M7
M5
Figura 28 – Circuito de espelho de corrente usado para gerar Vbias
Fonte: O autor
Capítulo 3. Projeto do OTA
47
3.5 Resultados Obtidos
Primeiro foi feita uma simulação da curva DC do circuito, porém observou-se que
as correntes I5 e I7 estavam abaixo do valor calculado, para chegar no valor da tabela 4
foi preciso diminuir W/L do transistor M pol para ((W/L)7 /1.3). As correntes medidas
foram:
• I5 = 13,55 µA
• I7 = 60,73 µA
O comprimento de canal dos transistores M 3, M 4, M 5, M 7 e M pol foram aumentados para 360nm, para reduzir os efeitos de modulação do canal, já que todos eles funcionam
como espelhos de corrente. Os valores de W/L foram arredondados, para facilitar o layout.
Nas primeiras simulações AC, constatou-se que a frequência de ganho unitário estava
abaixo do calculado, esta estava abaixo de 25 MHz, porém a margem de fase estava em
70◦ , acima do calculado. O valor do capacitor Cc foi então reduzido para 200 pF, para
aumentar a frequência GB.
Os valores finais de dimensionamento são os seguintes:
Tabela 4 – Dimensionamento do OTA após correções
Dimensionamento
Valor
W/L1
2 (L=120nm)
W/L3
15 (L=360nm)
W/L5
14 (L=360nm)
W/L6
96 (L=120nm)
W/L7
43 (L=360nm)
W/Lpol
33 (L=360nm)
Cc
200 pF
I5
13,55 µA
I7
60,73 µA
Fonte: O autor
Na figura 29 temos o comportamento DC do OTA. Pode-se extrair desta curva o
offset, o swing de tensão de saída e a faixa de tensão de modo comum. Os valores portanto
são os seguintes:
• Offset = 8,7 mV
• Output swing = 0, 05 − 1, 55 V
• Common mode range = 795 − 825 mV
Capítulo 3. Projeto do OTA
48
DC Response
1.75
Mon Dec 5 01:0...1
1.5
Vout (V)
1.25
M1: 808.70667mV 800.02359mV
1.0
.75
.5
.25
0.0
-.25
700.0
750.0
800.0
Vin (mV)
850.0
900.0
Figura 29 – Curva de comportamento DC do OTA
Fonte: O autor
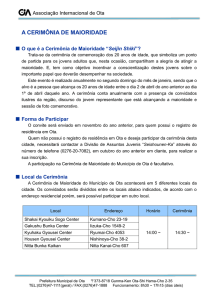
Na figura 30 temos a resposta em frequência do OTA. Pode-se extrair desta curva o
ganho diferencial, a frequência de ganho unitário e a margem de fase. Os valores portanto
são os seguintes:
• Ganho diferencial = 41,37 dB
• Frequência de ganho unitário = 44,3 MHz
• Margem de fase = 52◦
A frequência de ganho unitário é maior que a frequência de amostragem (25 MHz)
e ainda temos uma margem caso o circuito venha a ser usado com um pouco de ganho.
A margem de fase está abaixo de 60◦ , porém como já havia sido comentado, o circuito
irá funcionar realimentado, portanto esta margem de fase não deve ser um problema. O
ganho diferencial está abaixo dos valores citados pela literatura (60 a 80 dB). O ganho é
baixo devido a exigência de consumo do circuito, também devido ao tamanho pequeno
da tecnologia usada, pois nesta topologia o L dos transistores é diretamente proporcional
ao ganho do circuito. Se houvesse necessidade de aumentar o ganho, poderia ser avaliada
outra topologia, melhor adaptada a transistores com o L da tecnologia utilizada.
Na figura 31 temos a resposta transiente do OTA operando em saturação. Pode-se
extrair desta curva o slew-rate, que observa-se que é diferente para a saturação positiva e
negativa. Os valores são os seguintes:
• Slew-rate de saturação positiva = 66 V/µs
• Slew-rate de saturação negativa = 26 V/µs
Capítulo 3. Projeto do OTA
49
phase(GainAC)
Mon Dec 5 01:0...1
V1
50.0
50.0
Gain (dB)
-50.0
Phase (deg)
0.0
25.0
0.0
-100.0
-25.0
-150.0
-200.0
-50.0
M2: 44.2353MHz -128.009deg
-250.0
-75.0
-300.0
2
10
3
10
4
10
5
6
7
10 10 10
freq (Hz)
8
10
9
10
10 10
Figura 30 – Resposta em frequência do OTA, curvas de ganho e fase
Fonte: O autor
O circuito havia sido calculado para um slew-rate de 40 V/µs, portanto o valor
está um pouco diferente, mas ainda assim aceitável para as utilizações que se espera do
circuito. É possível que a diferença de subida e decida de saturação seja em função da
diferença no gds dos transistores M 3 e M 1 no estágio de entrada, se houver necessidade
de regular o slew-rate, alterações finas no dimensionamento do circuito podem ser feitas.
Transient Response
1.75
Mon Dec 5 00:5...1
1.5
Vout (V)
1.25
1.0
dx: 35.48891ns
dy: 886.883mV
s: 24.99044MV/s
.75
.5
.25
0.0
-.25
0.0
.5
1.0
time (us)
1.5
2.0
Figura 31 – Resposta transiente do OTA
Fonte: O autor
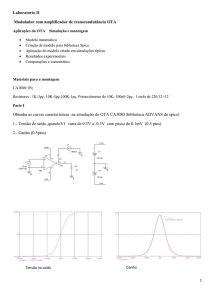
Na figura 32 temos a resposta de ruído do OTA, vista da saída do circuito e
também da entrada do circuito. Para comparação o ruído em 1 KHz é de −106 dB, que é
comparável aos −140 dB típicos ((ALLEN; HOLBERG, 2002)).
A partir da curva de ruído, pode-se calcular a figura de ruído para uma carga de
50 Ω a partir da equação 3.35 (GU, 2006). A figura 33 possui a figura de ruído do OTA. É
possível observar o ruído 1/f , porém a frequência de corner está bem acima do esperado (
próximo de 10 Mhz ), isso se deve muito provavelmente pelo fato de estarmos trabalhando
Capítulo 3. Projeto do OTA
50
output noise; V / sqrt(Hz)
-50.0
1
-75.0
-100.0
-125.0
-150.0
-175.0
-200.0
1.0kHz
-225.0
2
10
3
10
V1
-90.0
-65.46204dB
Vin/sqrt(Hz) (dB)
Vout / sqrt(Hz) (dB)
Mon Dec 5 01:0...1
V1
4
10
-100.0
-106.8363dB
-110.0
-120.0
-130.0
-140.0
1.0kHz
-150.0
5
6
7
10
10
10
freq (Hz)
8
10
9
10
10
2
10
3
10
10
4
5
10
(a)
6
7
10
10
10
freq (Hz)
8
10
9
10
10
10
(b)
Figura 32 – Resposta de ruído do ota a) Visto de Vout b) Visto de Vin
Fonte: O autor
com uma tecnologia muito pequena. Pode-se futuramente avaliar se um aumento no L dos
transistores do OTA causam uma melhora na resposta ao ruído.
N F = (Vin2 /Hz)db − (−174 − 30 − 10log10 (50))
(3.35)
1
V1
90.0
NF (dB)
80.0
80.0957dB
70.0
60.0
50.0
40.0
1.02187kHz
30.0
2
10
3
10
4
10
5
6
7
10
10
10
freq (Hz)
8
10
9
10
10
10
Figura 33 – Figura de ruído do OTA
Fonte: O autor
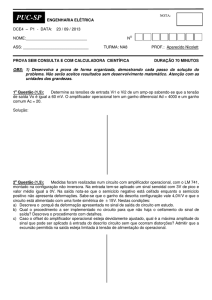
A figura 34 possuí as curvas de IMD1 e IMD3 e o ponto de encontro entre as duas
é o IIP3 do OTA em malha aberta. Este portanto possui um IIP3 de 24,1 dBm.
Capítulo 3. Projeto do OTA
51
1
V1
50.0
1dB/dB
Pout (dBm)
25.0
0.0
-25.0
3dB/dB
-50.0
M5: 24.14794dBm 5.877818dBm
-75.0
3rd Order freq = 900K
1st Order freq = 1M
-100
-10.0
0.0
10.0
PI (dBm)
20.0
Figura 34 – Calculo do IIP3 do OTA
Fonte: O autor
30.0
52
4 Modelo comportamental do OTA
Foi feita uma análise do código do modelo de AMP-OP do Cadence e chegou-se
no circuito da figura 35. A corrente de entrada é limitada pelo parâmetro IIN_MAX. A
corrente na saída é limitada por gm∗(Vout (max)−Vdd +Vsof t ) e gm∗(Vout (min)−Vss −Vsof t ).
Voffset
Vin_p
- +
Cout
+
R in
+
Vout
Vin
g mVin
Vin_n
R out
-
RI C I
-
Figura 35 – Circuito equivalente do modelo OTA do Cadence
Fonte: O autor
A resistência R1 , a capacitância C1 e gm são calculados pelos seguintes cálculos
com os parâmetros fornecidos:
IIN _M AX
SR
(4.1)
gm = 2π(GB)(C1 )
(4.2)
C1 =
r1 =
GAIN
gm
(4.3)
4.1 Dimensionamento
Os parametros do modelo foram encontrados a partir de técnicas de bottom-up,
onde os valores foram alterados sistematicamente até que a curva transiente do modulo
se comportasse similar a curva de OTA com transistores. Os valores dos parâmetros do
OTA modelo estão na tabela 5. Nem todos os parâmetros do modelo foram utilizados,
observa-se que o modelo possui valores padrão para todos os parâmetros, portanto, aqueles
parâmetros que não influenciaram nas analises realizadas ficaram com os valores padrões.
Capítulo 4. Modelo comportamental do OTA
53
Tabela 5 – Parâmetros do OTA utilizado de modelo
Parâmetros
Valor
Ganho
117,1(41,37 dB)
GB
44,26 MHz
offset
8,7 mV
Slew-Rate
26 V/µs
vsof t
0,1 V
Fonte: O autor
4.2 Resultados Obtidos
Na figura 36 temos a resposta em frequência do modelo do ota. Pode-se observar
que o comportamento dos dois é muito próximo até a frequência de ganho unitário, com
exceção da margem de fase, pois infelizmente este modelo não permite que se altere a
margem de fase e este também não possui opção de adicionar mais polos a função de
transferência do OTA.
Mon Dec 5 01:5...1
-160.0
40.0
-180.0
20.0
-200.0
0.0
-220.0
-20.0
-240.0
-40.0
-260.0
Phase (deg)
Gain (dB)
phase(GainAC)
60.0
-60.0
-280.0
2
10
3
10
4
10
5
6
7
10 10 10
freq (Hz)
8
10
9
10
10 10
Figura 36 – Resposta em frequência do modelo do OTA
Fonte: O autor
Na figura 37 temos a resposta transiente do OTA operando em saturação. O
slew-rate acaba se comportando igual na subida e na descida do sistema, porém o ota
dimensionado possui valores diferentes de slew-rate para subida e descida. Isto pode vir a
influenciar a resposta do filtro, caso este venha a carregar grandes cargas nos capacitores,
porém em funcionamento padrão, este não deve ser um problema, pois assume-se que os
capacitores vão operar sempre carregados. A valor de Vsat (max) = 1, 58 V, ficou muito
próximo do valor 1, 55 V encontrado no OTA dimensionado, este valor foi regulado variando
a variável Vsof t .
Capítulo 4. Modelo comportamental do OTA
Transient Response
1.75
54
Mon Dec 5 01:5...1
1.5
Vout (V)
1.25
1.0
.75
.5
.25
0.0
0.0
.5
1.0
time (us)
1.5
2.0
Figura 37 – Resposta transiente do modelo do OTA
Fonte: O autor
55
5 Conclusão
Este foi um projeto completo, envolvendo o estudo de sinais e sistemas e também
o projeto de um OTA, com especificações voltadas para funcionar como filtro IIR em
frequência de amostragem de 25 MHz. O OTA projetado apresentou valores consistentes
com os valores da literatura, com exceção do ganho diferencial, que ficou abaixo da média.
Suspeita-se que a topologia utilizada esteja obsoleta para a tecnologia utilizada, devido ao
pequeno tamanho dos transistores. Espera-se que mesmo com um ganho reduzido, este
funcione como amplificador do integrador de nosso filtro IIR, principalmente pelo fato
do mesmo estar ligado com realimentação e com ganho muito baixo, conforme eram as
especificações iniciais. O teste do filtro IIR completo pode vir a ser uma continuação deste
trabalho.
O projeto de sistemas analógicos mostrou-se complicado e acabou tomando mais
tempo do que o pretendido no cronograma inicial. Portanto, restou pouco tempo para o
trabalho com a modelagem do sistema. A forma como foi escolhida a modelagem do circuito,
com o bloco de amplificador da Cadence, mostrou-se um pouco abaixo da expectativa,
principalmente por esta não possuir parâmetros de polos e zeros da função de transferência
do bloco.
Para o prosseguimento deste trabalho, é possível que sejam feitos estudos de
melhoramento do bloco de amplificador da Cadence. O mesmo pode ser escrito na mesma
linguagem que o atual (Verilog-A) e seria interessante que realizem testes para averiguar se
este bloco teria condições de funcionar com as mesmas simulações no simulador Virtuoso.
Em uma segunda etapa, também é interessante realizar o layout do OTA em questão,
validar o circuito com simulações pos-layout, para então modela-lo novamente em linguagem
Verilog-A. É importante lembrar que o processo de modelagem do amplificador é muito
interessante para a redução do tempo de processamento da simulação, principalmente se
estivermos tratando de um sistema de tratamento de sinal completo. Espera-se que em
um futuro, toda a cadeia de recepção desenvolvida por (LOLIS, 2011) possa ser validada
com modelos completos, já com o layout pronto, tanto para os amplificadores como para
os switches do sistema. Existe também o interesse de transformar este OTA em um OTA
diferencial, para isso precisaria primeiro ser feito o estudo e projeto do feedback de modo
comum, que é um circuito a parte que pretende ser o referencial de tensão do circuito
diferencial, já que este não estaria ligado diretamente ao GND.
Conclui-se que o projeto em questão abordou duas áreas distintas do processo de
concepção de circuitos analógicos, que conversam entre si. Foi uma ótima experiência,
que agregou conhecimento de ambas as áreas, além do conhecimento técnico adquirido ao
Capítulo 5. Conclusão
56
trabalhar com o simulador.
A tabela 6 faz uma comparação deste trabalho com outros trabalhos apresentados
(YANG; ROBERTS, 2016).
Tabela 6 – Comparação do OTA com outros apresentados na literatura
Medições
Tecnologia
Alimentação
N◦ de estágios
Ganho
Slew-Rate
Potência
GB
Carga
Margem de fase
Unidades
nm
V
dB
V/µs
mW
MHz
pF
graus
OTA proposto
130
1,6
2
41
26
0,118
44,3
2
52
Fonte: O autor
[1]
130
1,2
8
120
5
7,96
15
1
30
[2]
130
1,2
2
71
19,5
0,11
35
5,5
45
[3]
350
1,5
3
110
1,8
0,03
4,4
150
57
[4]
65
1,2
3
100
0,65
0,02
2
500
52
[5]
500
2,5
3
90
14
250
12
-
57
Referências
ALLEN, P.; HOLBERG, D. CMOS Analog Circuit Design. Oxford University Press, 2002.
(Oxford series in electrical and computer engineering). ISBN 9780195116441. Disponível
em: <https://books.google.com.br/books?id=-crQYfNHJDUC>. Citado 7 vezes nas
páginas 30, 31, 32, 37, 39, 40 e 49.
BAGHERI, R. et al. An 800-mhz ndash;6-ghz software-defined wireless receiver in 90-nm
cmos. IEEE Journal of Solid-State Circuits, v. 41, n. 12, p. 2860–2876, Dec 2006. ISSN
0018-9200. Citado na página 12.
CARUSONE, T.; JOHNS, D.; MARTIN, K. Analog Integrated Circuit Design,
2nd Edition. John Wiley & Sons, 2011. ISBN 9781118213735. Disponível em:
<https://books.google.com.br/books?id=GeobAAAAQBAJ>. Citado 5 vezes nas
páginas 20, 21, 22, 23 e 24.
GU, Q. RF System Design of Transceivers for Wireless Communications. Springer US,
2006. ISBN 9780387241616. Disponível em: <https://books.google.com.au/books?id=
dAGfSkX3\_vgC>. Citado 2 vezes nas páginas 34 e 49.
LOLIS, L. Agile bandpass sampling RF receivers for low power applications. Tese
(Doutorado) — Université Sciences et Technologies-Bordeaux I, 2011. Citado 7 vezes nas
páginas 12, 19, 20, 25, 26, 36 e 55.
MALOBERTI, F. Analog Design for CMOS VLSI Systems. Springer, 2001. (The
Kluwer international series in engineering and computer science.VLSI, computer
architecture and digital signal processing). ISBN 9780792375500. Disponível em:
<https://books.google.com.br/books?id=hITYEAMMWgwC>. Citado 3 vezes nas
páginas 22, 28 e 29.
OPPENHEIM, A.; SCHAFER, R.; BUCK, J. Discrete-time Signal Processing. Prentice
Hall, 1999. (Prentice Hall international editions). ISBN 9780137549207. Disponível em:
<https://books.google.com.br/books?id=Bv1SAAAAMAAJ>. Citado na página 18.
STASZEWSKI, R. B. et al. All-digital tx frequency synthesizer and discrete-time receiver
for bluetooth radio in 130-nm cmos. IEEE Journal of Solid-State Circuits, v. 39, n. 12, p.
2278–2291, Dec 2004. ISSN 0018-9200. Citado na página 12.
SUN, Y.-R. Generalized Bandpass Sampling Receivers for Software Defined Radio.
Stockholm: KTH, 2006. ISBN 91-7178-350-4. Citado na página 25.
YANG, M.; ROBERTS, G. W. A digitally programmable 50 x2013;150db dc gain
operational transconductance amplifier in 130nm cmos. In: 2016 14th IEEE International
New Circuits and Systems Conference (NEWCAS). [S.l.: s.n.], 2016. p. 1–4. Citado na
página 56.