Conteúdo I
1- Biomecânica
1.1– Um pouco de definição
De maneira geral podemos entender que Biomecânica é o estudo anatomorfológico do
movimento dos seres vivos e dos seus segmentos corporais.
Mas, podemos imaginar a Biomecânica como uma ferramenta para se estudar o movimento
dos membros do corpo humano e como eles respondem fisicamente a estimulos e ao próprio
movimento.
A importância do ensino da Biomecânica reside no fato da mesma ser imprescindível para
diversos cursos e carreiras profissionais. Para citar: Educação Física, Medicina, Enfermagem e
Fisioterapia(Corso, 2009).
Em biologia e ciências da saúde como um todo há um grande poder nas palavras para a
descrever os mecanismos da natureza. Podemos tratar melhor a própria expressão “estudo
anatomorfológico do movimento”. A expressão é composta por duas palavras 1- ANATOAnatomia, 2- morfologia – estudo da forma.
A definição clássica de anatomia é o ramo da biologia que estuda a estrutura e a organização
dos ELEMENTOS dos seres vivos, tanto externa quanto internamente. A ênfase nos elementos
surge pelo fato de que atualmente com o surgimento de mais ramos da biologia que estuda a
organização dos seres vivos do ponto de vista de indivíduos (Ecologia) e dos tecidos que formam os
seres vivos (Histologia) eu preferi a ênfase na palavra elementos. Existe a Anatomia humana,
animal e vegetal. Uma das especificidades da anatomia é a anatomia comparada que procura
encontrar relações entre os diferentes órgão de várias espécies animais na procura de padrões a
serem usados para a melhor compreensão (Gordon, 1995).
O estudo anatomorfológico se confunde no sentido de estudar como os órgãos estão
estruturados nos seres vivos e quais as suas principais formas e o papel destas formas na promoção
do movimento. Sendo assim a Biomecânica.
Desta forma analisar qual a vantagem de se dobrar as pernas para levantar um dado objeto?
Qual a melhor forma de se dispor as pernas enquanto você pedala? Qual o dano ou o ganho na
forma dos membros do gado que vive confinado em um terreno montanhoso ou plano? São
questões que podem ser analisadas dentro do viés da Biomecânica.
1.2 – Cinemática e cinesiologia
Tanto no espaço curricular “Introdução à Mecânica Clássica” quanto em “Gravitação e Leis
de Conservação” estudamos a cinemática que é o estudo da descrição do movimento de um corpo
sem a preocupação com a origem deste movimento. Na cinemática sabemos que a velocidade
escalar de um ponto material v é a razão entre o espaço percorrido entre dois eventos ( S ) e
o intervalo de tempo decorrido entre os dois eventos ( t ), ou seja:
S
v=
(1)
t
Perceba que nesta abordagem não nos preocupamos com qual o ente físico que imprime esta
velocidade no corpo, apenas queremos relacionar as três grandezas, velocidade, espaço percorrido e
tempo.
No mesmo sentido temos a cinesiologia que é o estudo do DESENVOLVIMENTO dos
1/18
movimentos realizados por um corpo.
Na cinemática simplificamos ao máximo, começamos o seu estudo com a análise do ponto
material, pois o mesmo não possui dimensões e é mais simples. Definimos o referencial inercial e
tentamos desenvolver toda uma teoria para a explicação dos movimentos mais comuns do dia a dia.
Em contrapartida na cinesiologia definimos o referencial no corpo do ser analisado, reduzimos um
passo do que tínhamos anteriormente na cinemática e tratamos sempre de corpos extensos que são
os membros dos corpos dos seres vivos (daí a importância de se estudar a Anatomia). Ao contrário
da cinemática a cinesiologia sempre olhará para o elemento promotor do movimento e as forças que
o promovem advindas dos músculos.
Desta forma a cinesiologia terá paralelamente no seu desenvolvimento a presença da
dinâmica.
Uma das aplicações da cinesiologia é a cinesioterapia que pode ser entendida como a terapia
através dos movimento. Aqui o sentido da palavra terapia pode ser sintetizado como o conjunto de
ações (tratamento) para sanar uma anomalia do corpo. Assim temos terapias químicas, genéticas,
fitológicas e uma diversidade de outras, dentre elas a cinesioterapia.
Esta rápida introdução presente neste dois itens são apenas para deixar o mais claro possível
para você, prezado aluno, que será necessário lembrar de todos os conceitos de dinâmica para que
seu caminho seja mais suave na compreensão da Biomecânica. Agora iremos para algumas
novidades, aumentar o nosso conhecimento de anatomia humana.
1.3 – Conceitos básicos de anatomia
Na visão mais inocente e simplista de anatomia poderíamos dividir os corpos dos animais
em três partes, a saber: cabeça, tronco e membros. É evidente que para alguns organismos não
necessitaríamos de todos os três (veja alguns peixes que possuem resumida quantidade de
membros). Mas, podemos a princípio dividir desta forma o corpo dos seres vivos.
Como somos seres finitos, precisamos definir um objeto de estudo mais preciso, então
falaremos do corpo humano a princípio.
O corpo humano se mantem graças ao sistema esquelético, que além de sustentar o corpo
protege os órgãos internos e fornece pontos de sustentação para os músculos. O esqueleto humano
constitui-se de peças ósseas (ao todo 208 ossos no indivíduo adulto) e cartilaginosas articulações,
que formam um sistema de alavancas movimentadas pelos músculos.
A principio não iremos falar muito sobre o tecido ósseo deixaremos para uma próxima aula a
discussão da natureza do tecido ósseo. Estudaremos agora como denominamos os diversos ossos no
corpo humano e sua localização.
Na figura da ilustração 1 temos uma representação do esqueleto humano e a nomenclatura
da maioria de suas partes. Definisse uma divisão do esqueleto humano que usarei apenas a critérios
ilustrativos.
1-Esqueleto axial: formado pela caixa craniana, coluna vertebral caixa torácica.
2-Esqueleto apendicular: compreende a cintura escapular, formada pelas escápulas e clavículas;
cintura pélvica, formada pelos ossos ilíacos (da bacia) e o esqueleto dos membros (superiores ou
anteriores e inferiores ou posteriores).
Nesta aula apenas tomaremos conhecimento do nome destes que alguns ossos que são os
mais importantes e seu papel na estrutura do corpo humano.
Mas, junto com os ossos temos os músculos que são muito importantes no papel de
sustentação e movimento do corpo, na figura da ilustração 2 temos uma imagem simplificada dos
mais importantes músculos do corpo humano.
Tecnicamente miologia é a parte da anatomia que estuda os músculos e os seus anexos. O
músculo é definido como uma estrutura anatômica capaz de contrair quando devidamente
estimulado. Posteriormente discutiremos como este estímulo ocorre.
2/18
Ilustração 1: Figura ilustrativa do esqueleto
humano (Avancini & Favaretto, 1997).
Ilustração 2: Figura ilustrativa da musculatura do corpo
humano.
3/18
Assim como o esqueleto destacarei apenas alguns músculos mais importantes no corpo
humano responsável para fixação de objetos (através dos braços) e do movimento (através das
pernas).
Nos braços temos o bíceps e o tríceps como os músculos que funcionam na flexão e
tencionamento do braço. Outro músculo importante é o deltóide pelo revestimento feito na região
do antebraço. Na perna eu destaco o glúteo, adutor e vasto medial. Não existe um consenso sobre a
quantidade de músculos no corpo humano, mas devem ultrapassar 360 de acordo com alguns
autores.
Precisamos revisar alguns conceitos de estática que você já entro em contato anteriormente.
Lembrando a definição clássica de alavancas e seu relacionamento com algumas leis de
conservação
1.4 – Uma revisão sobre alavancas
Normalmente quando lemos livros de Mecânica e de Biomecânica existe uma nomenclatura
toda especial para tratar das alavancas, após descrever esta nomenclatura eu procurarei retornar ao
que esta nomenclatura representa dentro de toda a teoria da Mecânica Clássica que estudamos em
Gravitação no semestre passado.
De maneira simplista alavanca é um objeto rígido que é usado com um ponto fixo
apropriado para multiplicar a força mecânica que pode ser aplicada a um outro objeto (resistência).
Ilustração 3: Princípio de
funcionamento de uma alavanca.
No caso da figura da ilustração 3 se desejarmos movimentar o peso da esquerda que exerce
uma força F 1 deveremos aplicar uma força F 2 no peso da direita para que tenhamos
equilíbrio. A expressão torna-se:
F 2×D2 =F 1× D 1 (2)
D
D
A distância
e
são denominadas respectivamente de braço resistente e braço
2
1
potente, a força F 1 é a força resistente e F 2 é a força potente.
Normalmente se faz uma classificação em função da posição do ponto fixo da alavanca e
assim temos três classes:
i- Alavanca inter-fixa ou de primeira classe onde o ponto fixo fica entre a força resistente ( F 1 )
e a força potente ( F 2 ).
4/18
Ilustração 4: Figura esquemática
de uma alavanca inter-fixa.
Note que na figura 4 a mão indica a força potente. No corpo humano um exemplo clássico
deste tipo de alavanca é o tornozelo.
ii- Alavanca inter-resistente ou de segunda classe onde a força resistente ( F 1 ) está entre a
força potente ( F 2 ) e o ponto fixo.
Ilustração 5: Figura esquemática
de uma alavanca inter-resistente.
Um exemplo no corpo humano deste tipo de alavanca é o pé.
iii- Alavanca interpotente ou de terceira classe onde a força potente ( F 2 ) está entre a força
resistente ( F 1 ) e o ponto fixo. Um exemplo no corpo humano é o cotovelo.
Ilustração 6: Figura esquemática
de uma alavanca interpotente.
Como afirmei, esta nomenclatura é muito comum em livros de biomecânica, mas toda esta
nomenclatura pode ser sintetizado dentro da teoria da dinâmica de Newton, então voltaremos às leis
de Newton.
1.5– As leis de Newton
Vamos usar novamente as definições das leis de Newton que usamos anteriormente. Em
ordem começamos com a primeira lei que diz:
“Todo o corpo persiste em seu estado de repouso, ou de movimento
retilíneo uniforme, a menos que seja compelido a modificar esse estado pela
ação de forças impressas sobre ele.”
A primeira lei vale tanto para o caso do corpo em movimento (equilíbrio dinâmico) como no
5/18
caso da ausência de movimento (equilíbrio estático), no corpo humano temos o equilíbrio estático
nos membros do corpo humano. Ou seja, a velocidade é nula.
A segunda lei de Newton diz:
“A força resultante sobre um corpo é igual ao produto da massa do corpo pela
aceleração do corpo.”
Podemos sintetizar esta lei através da seguinte expressão :
∑ F =m a
(3)
Perceba que a equação (3) possui uma somatória no lado esquerda que indica a resultante
das forças. Se queremos um equilíbrio estático precisamos de duas imposições i-) aceleração nula,
ii-) velocidade inicial nula. O que resultará em:
∑ F =0
(4)
No entanto, como discutimos nas aulas de Gravitação, se temos um corpo extenso a segunda
lei de Newton não é o suficiente para determinar o equilíbrio de um corpo, necessitamos também de
que a rotação seja nula. E para tanto é necessário usarmos a mesma lei de Newton para as rotações
∑ =I
(5)
Sendo que I é o momento de inércia do corpo e é a aceleração angular do corpo.
Usando a mesma condição de equilíbrio queremos não ocorram rotações, então a aceleração deve
ser nula e teremos:
∑ =0
(6)
Se não há velocidade angular inicial teremos o completo equilíbrio estático se as condições
(4) e (6) serem atendidas.
É bom reenfatizar que a lei de Newton não define o que é força, mas ela diz como funciona
a força com relação à aceleração e a massa (ou o momento de inércia) do corpo. Em função disto,
devemos pensar em alguns tipos de força. Eu destacarei apenas duas a força normal e a força de
atrito.
1.5.1 – A força normal
A força normal é uma força de contato que ocorre em regiões de contato entre dois corpos. A
força normal é sempre perpendicular à superfície.
Na figura da ilustração 7a temos que a força normal entre a superfície e o bloco coincide na
direção da força peso com sentido contrário. Na 7b temos uma força normal que também coincide
com o peso, o mesmo não ocorre na figura 7c.
6/18
(a)
(c)
(b)
Ilustração 7: Demonstração dos diversos tipos de força normal.
1.5.2 – A força de atrito
Toda a superfície possui irregularidades e estas irregularidades causam o atrito que é a
resistência ao movimento causada pelo contato entre duas superfícies.
A força de atrito está relacionada a força normal através da seguinte expressão empírica (não
existe uma dedução teórica fundamental).
∣Fatr∣=∣N∣
(7)
Observe que a expressão (7) não apresenta a direção da força de atrita que é sempre
contrária ao movimento que o corpo realiza, a figura da ilustração 8 mostra claramente esta relação.
Desta forma a força de atrito dentro de um circuito fechado não realiza um trabalho nulo e logo a
força de atrito não é conservativa. Pelo mesmo motivo não se pode escrever um potencial como o
caso da força gravitacional que discutimos na disciplina de Gravitação. No corpo humano existe
muito atrito entre os seus elementos como veremos mais adiante.
Ilustração 8: Figura ilustrativa
mostrando a força motora e a força de
atrito. Note que elas possuem sentidos
contrários.
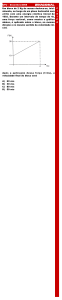
Outro fator interessante é que o atrito muda se o corpo está em movimento ou estático, assim
temos dois tipos de coeficiente de atrito o estático e o dinâmico (ou cinético como afirmam alguns
autores). Na figura da ilustração 9 temos o comportamento da força de atrito (representada pela letra
f ) e a força aplicada (representada por F app ). Enquanto a força de aplica da é menor do que o
valor máximo do coeficiente de atrito estático s a força de atrito permanece com o mesmo
valor da força aplicada. Quando a força aplicada torna-se maior do que a força de atrito estático
7/18
máximo f s ,max
k s .
o atrito deixa de ser estático e torna-se cinético (ou dinâmico). Normalmente,
Ilustração 9: Figura ilustrativa da força
de atrito em função da força aplicada.
1.6 - Exemplos
Nesta seção faremos alguns exemplos para fixar as ideias acima.
Exemplo 1 - Considere 2 blocos sobre uma mesa (veja figura abaixo): o bloco A com peso igual a 2
N está sobre a mesa. O bloco B, pesando 4 N, está sobre o bloco A . Analise as forças que agem
sobre cada um dos blocos separadamente. Finalmente, determine a força de contato total exercida
sobre a mesa pelos 2 blocos.
B
A
Mesa
Ilustração 10: Figura do exemplo 1.
Resolução: O primeiro passo é o de analisar separadamente cada bloco. No bloco B temos duas
forças ocorrendo a força peso do bloco B e a força normal do contato entre B e A denotada por
N AB .
8/18
N
AB
B
A
P
B
Ilustração 11: Figura mostrando os blocos A e B
isolados.
Para que haja equilíbrio, em módulo N AB= P B . Agora observando o bloco A e a mesa
teremos o peso do bloco A atuando na mesa, a reação da Normal de A com B que denotaremos por
N BA e a normal da mesa com A que denotaremos por N MesaA . Para que haja equilíbrio
N MesaA= P A N BA= P A P B e assim finalmente, sobre a mesa teremos a sensação da reação da
normal N MesaA que fará com que a mesa sinta o equivalente a soma dos pesos. Perceba que o
“segredo” da abordagem de Newton é escrever as forças nos corpos separadamente.
N
N
MesaA
BA
A
PA
Mesa
Ilustração 12: Figura mostrando o bloco A e a mesa
isoladamente.
Exemplo 2 – Um bloco de massa 10 kg está sobre uma mesa plana e localizada na origem de um
sistema de coordenadas tridimensional (conforme figura abaixo). Uma força F 1=20 N é
aplicada ao longo do eixo y no sentido positivo do eixo. Uma força F 2=50 N é aplicada no
sentido positivo de x fazendo um ângulo de 30° com o eixo x. O coeficiente de atrito estático
entre a superfície e o bloco é s=0,2 e o coeficiente de atrito cinético é k =0,16 . a-) Qual o
valor do módulo da força de atrito no eixo y e a sua natureza? b-) O bloco permanece imóvel nestas
condições ? Explique. c-) Existe algum valor do ângulo para o qual o corpo se deslocará e em qual
direção?
9/18
c
Ilustração 13: Figura do bloco citado no exemplo 2.
Resolução
a-) Neste temos que começar calculando a força normal do bloco que está na direção z no sentido
m
positivo do eixo e possui módulo igual ao peso do bloco ( ∣N∣=mg=10 kg∗10 2 =100Newtons
s
), a força aplicada no eixo y é igual a força de atrito estático f s =s N =0,2∗100 N =20 N , logo,
neste eixo o bloco permanece imóvel pois o atrito é estático e de mesmo valor da força aplicada.
b-) Como vimos no item anterior, no eixo y não há movimento. No eixo z a componente da força
F 2 é F⃗2z dada por ∣F⃗2z∣=∣ F⃗2∣sin(30 ∘)=25 N esta força está na direção de z no sentido
positivo do eixo, na notação dos versores unitários teremos F⃗2z =25 N k̂ esta força é menor do
que a força peso do bloco, logo não há movimento no eixo z. No eixo x temos
°
∣F2x∣=∣ F 2∣cos 30 =43 N , este valor é maior do que o valor da força de atrito estático, logo há
uma força de atrito cinético dada por f k =k N =0,15∗100 N =15 N . Como mostra a figura
≠0 , colocando as forças
abaixo teremos uma somatória de forças não-nula nesta situação ∑ F
a sendo que m é a massa do bloco que é de 10 kg, a aceleração possui o
teremos fk − F2x=m
mesmo sentido da força de maior valor (procure lembrar as aulas de Gravitação). Para o cálculo do
valor da aceleração é somente isolar a aceleração na equação, então teremos:
∣ F ∣−∣ f k∣ 43N−15N
m
∣
a∣= 2x
=
=2,8 2
m
10 kg
s
Ou seja, o bloco não ficará imóvel nesta situação e será deslocado para a direita com uma
m
aceleração 2,8 2 .
s
c-) O ângulo deve ser aquele para qual tenhamos no mínimo a componente de F 2 igual à força
10/18
de atrito estático
∣F2x∣− fs =0⇒∣F2∣cos−
f s =0
Agora podemos isolar o ângulo nesta expressão e teremos:
∣ f ∣ 20N 2
2
cos = s =
= ⇒ cos = ⇔≈66°
5
∣F 2∣ 50N 5
°
Isto quer dizer que para um ângulo menor do que 66 o bloco se deslocará para a direita e
para ângulos maiores do que 66° ele permanecerá imóvel.
a
c
fk
F2x
Ilustração 14: Distribuição das forças no bloco do exemplo 2.
Exemplo 3 – Um bloco de 6 kg de massa está sobre uma prancha que pesa 25 N como ilustra a
figura. Quais serão as leituras nas duas balanças?
Resolução
Para resolvermos este problema a primeira coisa a fazer é distribuir as forças como mostra a
figura da ilustração 16 . Nesta configuração iremos adotar o ponto 1 como o ponto de rotação,
poderíamos adotar o ponto 2 apenas tomando o cuidado com o sinal das rotações. O peso da
prancha está aplicado em seu centro de massa que no caso da prancha é o seu centro geométrico (o
meio da prancha). Este peso causa uma rotação horária ao redor do ponto 1 que é o mesmo sentido
da rotação causada pelo peso do bloco. No entanto, todo o conjunto está em repouso logo a
condição de equilíbrio para o momento angular é que:
∑ =0 ⇒ F 1×025N×1,5 m60N×2,5 m−F 2×3 m=0
O módulo da força
F 2 será o valor da leitura na balança.
11/18
Ilustração 15: Figura ilustrativa do exemplo 3.
25N×1,5 m60N×2,5 m
F 2=
=62,5 N
3m
Para o cálculo da força no ponto 1 devemos utilizar a outra condição de equilíbrio estático,
que a somatória das forças seja nula.
∑ F =0 ⇒ F 1−25N−60N62,5=0
É muito simples isolar F 1 e encontrar F 1=22,5 , este resultado vem ao encontro da
leitura que aparece nas balanças. Note que simplesmente somente uma das condições jamais
resultaria na resposta correta pois não teríamos certeza, ao “chutar” valores quais as infinitas
combinações de pares de força que por exemplo atendessem a condição de igual a soma da duas
forças aplicadas conhecidas (25N +60 N=85 N).
Epígrafe
(para quem gosta desta palavra)
Evidentemente não terminamos com todos os tipos de problemas possíveis com os conceitos
discutidos nos parágrafos anteriores. Não priorizei tanto a parte biológica, no entanto, nos
exercícios a seguir haverá mais treino para a aplicação destes conceitos em sistemas biológicos.
Procure resolvê-los. Qualquer dúvida procure o professor.
O que poderíamos sintetizar como o mais importante em todos estes conceitos é a ideia de que o
corpo humano pode ser pensado como uma máquina sujeita as condições de equilíbrio da Física.
12/18
F
1
1,5
m
F
2
60N
25N
Ilustração 16: Distribuição das forças na figura do exemplo 3.
1.7- Exercícios
1-) Considere 2 blocos sobre uma mesa: o bloco A com peso igual a 10 N está sobre a mesa. O
bloco B, pesando 5N, está sobre o bloco A . Analise as forças que agem sobre cada um dos blocos
separadamente. Finalmente, determine a força de contato total exercida sobre a mesa pelos 2 blocos.
B
A
2-) Considere um paciente submetido a um tratamento de tração como indica a figura abaixo. Qual
a máxima massa a ser utilizada para produzir a força T sem que o paciente se desloque ao longo
da cama? Sabe-se que a massa desse paciente é 60 kg, o coeficiente de atrito entre o mesmo e a
cama é =0,20 .
13/18
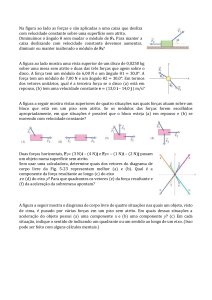
3-) A fim de forçar um dos dentes incisivos para alinhamento com os outros dentes da arcada, um
elástico foi amarrado a dois molares, um de cada lado, passando pelo dente incisivo, como mostra a
figura abaixo. Se a tensão no elástico for 12 N, quais serão a intensidade e a direção da força F
aplicada ao dente incisivo? Faça o desenho.
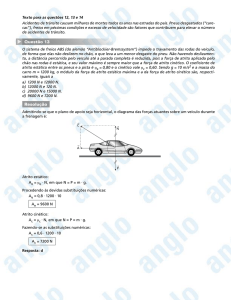
4-) Em uma rasteira de Judô, você tira o apoio do pé esquerdo do adversário ao mesmo tempo em
que puxa o quimono para este lado sem apoio. Em consequência, seu adversário gira em torno do pé
direito em direção ao tatame. A figura abaixo mostra um diagrama simplificado do seu adversário,
com o pé esquerdo já fora do chão. O eixo de rotação passa pelo ponto O . A força gravitacional
Fg age sobre o centro de massa do seu adversário, que está a uma distância horizontal d=28 cm
do ponto O . Sua massa é de 70 kg e seu momento de inércia com relação à O é 65 kg.m 2. Qual é o
módulo da aceleração inicial do seu adversário em relação ao ponto O se o puxão Fa que você
aplica ao seu quimono (a) é desprezável e (b) é horizontal, com módulo de 300 N e aplicado a uma
altura h=1,4 m? Faça g=9,8 m/s2.
14/18
5-) A figura abaixo mostra a representação do músculo bíceps, dos ossos do braço e do antebraço
imóvel, na horizontal (perpendicular ao braço) e com um alter na mão. As forças que atuam no
conjunto antebraço-mão estão representadas no esquema na parte inferior. Encontre a força
muscular exercida pelo bíceps para equilibrar as forças (atenção!!!). São conhecidos: O módulo do
peso P (objeto mais a mão)=20N, o peso A (antebraço) = 15N. O módulo da força R que é a força
de reação do úmero contra a ulna vale 20N.
15/18
6-) Um carregador suporta na palma da mão um bloco de massa m=7,2 kg. Como a figura abaixo
mostra, seu braço está em posição vertical, enquanto seu antebraço, apesar de levemente inclinado,
podemos considerar como estando em posição horizontal. O ponto O é o ponto de contato do
cotovelo com o antebraço. O centro de massa do antebraço encontra-se a 13 cm de distância do
ponto O e a massa total do antebraço e da mão é de 1,8kg. a-) Qual o valor da força Fm exercida
pelo bíceps? (agora não é apenas equilíbrio de forças) b-) Qual o valor da força exercida pela
estrutura óssea do braço sobre o antebraço? c-) Discuta a magnitude destas forças.
7-) Na figura abaixo um bloco de 15 kg é mantido em repouso através de um sistema de polias. O
braço da pessoa está na vertical; o antebraço faz um ângulo θ=30 Y com a horizontal. O antebraço e a
mão têm uma massa conjunta de 2 kg, com um centro de massa a distância d 1=15cm à frente do
ponto de contato dos ossos do antebraço com o osso do braço (úmero). Um músculo (o tríceps)
puxa o antebraço verticalmente para cima com uma força cujo ponto de aplicação está a uma
distância d2=2,5 cm atrás desse ponto de contato. A distância d 3 é 35 cm. Quais são (a) o módulo e
(b) o sentido (para cima ou para baixo) da força exercida pelo tríceps sobre o antebraço e ( c) o
módulo e (d) o sentido (para cima ou para baixo) da força exercida pelo úmero sobre o antebraço?
16/18
8-) A distribuição de massa corporal de um homem de 70 kg é a seguinte : cabeça+pescoço = 5,0
kg; cada braço e antebraço-mão=3,5 kg;tronco=37kg; cada coxa=6,5kg; cada perna mais pé=4,0kg.
Supondo que esta pessoa esteja em pé sobre os dois pés, calcule a intensidade da força normal (de
contato): a-) total exercida por cada uma das junções dos quadris; b-) exercida por cada uma das
junções do joelho. Supondo que agora ele fique em pé sobre um pé somente, calcule a intensidade
da força de contato exercida: c-) pelo joelho da perna sobre a qual o homem está em pé; d) pelo
joelho da perna que está suspensa.
9-) Considere uma criança de 20 kg em um escorregador que faz com a horizontal um ângulo de
45graus, e os coeficientes de atrito estático e cinético entre o corpo da criança e o escorregador são
respectivamente de 0,8 e 0,6.
a-) Decomponha o peso P da criança em componentes ortogonais em relação ao plano do
escorregador e calcule os módulos dessas componentes;
b-) calcule o valor da força normal exercida pelo plano do escorregador sobre a criança;
c-) avalie se a criança ao soltar as mãos sai escorregando;
d-) calcule a intensidade da força de atrito cinético;
e-) determine a aceleração com que a criança desce o escorregador;
f-) discuta o que acontece se o ângulo for maior do que 45 graus.
10-) Discuta o porquê da dificuldade em fazer abdominais, deitado: a-) com os braços esticados na
direção do corpo apontando para os pés; b-) com os braços cruzados sobre o peito; c-) com os dedos
das mãos entrelaçados e sob a cabeça.
Respostas
1-) No bloco A estão aplicadas a força peso de 5 N e a força normal de 5 N. No bloco B estão
aplicadas a força peso de 10 N, a força normal de 5 N exercida pelo bloco A e a força normal de 15
N. A força total na mesa devida aos pesos dos dois blocos é de 15 N.
2-) m=12 kg.
=0,7 i −20,1 j N .
3-) F
4-) a) 2,96 rad/s2; b) 9,42 rad/s2.
5-) 55 N considerando apenas a soma das forças que surgem.
6-) a) 690 N, b) 601 N, c) As forças são bem maiores do que o peso da caixa.
7-) a) 1,9 kN; b) para cima; c) 2,1 kN; (d) para baixo.
8-) a) 245 N; b) 310 N; c) 660 N; d) 40N.
9-) a) P x =P y =141,4 N ; b) N =141,4 N ;c) f s =113,1 N a criança deve escorregar; d)
f k =84,8 N ; e) a=2,83 m/s 2 ; f) Se o ângulo aumentar a componente y diminui e
consequentemente a força normal. Assim, a força de atrito estático diminui e a criança sairá
escorregando com mais facilidade.
10-) A dificuldade progressiva se deve ao aumento do torque que resulta do aumento da distância de
aplicação da força peso do conjunto em relação ao eixo de rotação que se situa no baixo lombar.
1.8 - Bibliografia
Avancini & Favaretto. Biologia – Uma abordagem evolutiva e ecológica. Vol. 2. Ed. Moderna,
São Paulo, (1997)
Corso, G. “Os conteúdos das disciplinas de biofísica e física” Revista Brasileira do Ensino de
Física, v. 31, n. 2, 2703 (2009).
Gordon, R. A assustadora História da Medicina. Ed. Diouro: São Paulo, (1995).
17/18
Halliday D., Resnick R. & Merril, J. Fundamentos da Física. Vol.1, 8 ed., LTC, Rio de Janeiro,
(2009)
Nussenzveig, H. M. Física Básica. Vol. 1, Edgard Blücher, São Paulo, (1996).
Okuno, E., Fratin E., Desvendando a Física do Corpo Humano: Biomecânica. Manole: São
Paulo,
18/18