UNIVERSIDADE DO ESTADO DE SANTA CATARINA
CENTRO DE CINCIAS TECNOLÓGICAS
DEPARTAMENTO DE FÍSICA
LABORATÓRIO DE
FÍSICA EXPERIMENTAL - I
(FEX 1001)
1
FEX 1001
MEDIDAS FÍSICAS
Objetivos
Realizar medidas diretas (diâmetro, comprimento, largura, espessura e massa) expressandoas com a quantidade correta de algarismos signicativos.
Realizar medidas indiretas
(área, volume, densidade), expressando-as com a quantidade correta de algarismos signicativos após as operações matemáticas necessárias. Expressar de forma adequada os
resultados obtidos, incluindo os desvios das medidas e os erros propagados. Calcular o
erro percentual.
Teoria
A medida de uma grandeza física sempre é realizada no âmbito das limitações inerentes
ao próprio processo de medida e ao(s) instrumento(s) empregado(s). As limitações dos
aparelhos de medida, assim como dos processos de medida, devem ser obrigatoriamente
informadas no resultado nal da medida. Nessa informação devem constar os algarismos
signicativos, as unidades das medidas e um intervalo de conabilidade dessas medidas,
em que as limitações citadas estão incluídas. O intervalo de conabilidade, ou incerteza da
medida, pode ser adotado convenientemente pelo agente da medida entre várias opções:
erro de escala, erro percentual, desvio padrão, desvio médio, e outras formas.
Assim,
podemos expressar o resultado de uma medição na forma genérica:
(Medida ± Desvio) unidade
Note-se que essa forma serve tanto para medidas diretas quanto indiretas.
No caso
destas, deve-se respeitar as regras de operação com os algarismos signicativos.
Para
a realização da atividade experimental serão empregados os seguintes instrumentos de
medida: paquímetro, micrômetro e balança digital.
Paquímetro
As réguas simples têm como menor divisão de escala o milímetro (10
−3 mm), o que per-
mite medidas com o algarismo duvidoso na casa dos décimos de milímetro, por exemplo,
123, 4562 m.
Torna-se inviável dividir o milímetro das réguas em décimos de milímetro, o
123, 45624 m.
Neste caso, os traços seriam tão próximos
que seria quase impossível vê-los a olho nu.
Para ultrapassar essa diculdade, foram
que permitiria leituras do tipo:
criados outros instrumentos para realizar medidas com melhor resolução do que a régua
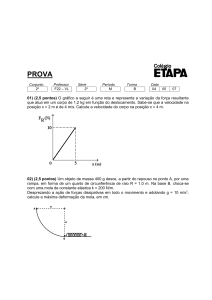
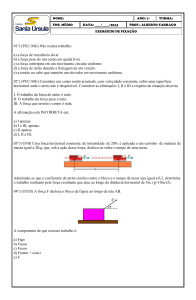
milimetrada. Um desses instrumentos é o paquímetro, mostrado na gura 0.1 que serve
para medir pequenas espessuras, profundidades e dimensões internas.
2
Figura 0.1:
O paquímetro, instrumento de medida empregado para realizar medidas lineares com leituras de até centésimos de milímetros, e suas partes principais.
No cursor, ou régua móvel, está indicada a divisão do nônio (0, 02 mm).
Isto signica que as leituras serão do tipo: XX, X0 mm; XX, X2 mm;
XX, X4 mm; XX, X6 mm ou XX, X8 mm.
O paquímetro é constituído de uma régua metálica principal (xa) graduada, geralmente milimetrada, ao longo da qual desliza uma régua móvel graduada secundária (nônio
ou Vernier) que permite a leitura de frações da menor divisão da escala da régua, cuja
invenção é atribuída a Pierre Vernier.
Como medir com o paquímetro:
(a)
posicione a peça segundo o tipo de medida a ser executada;
(b)
leia diretamente na régua xa a medida em milímetros;
(c)
procure o primeiro traço da escala do nônio que coincide com um traço qualquer
da escala da régua móvel, esse é o valor da subdivisão do milímetro, que com-
0, 05 mm, todas as
medidas devem ser do tipo: 4, 00 mm; 6, 05 mm; 110, 15 mm; 1, 20 mm; 0, 25 mm;
10, 30 mm; etc. Com esse nônio nunca serão obtidas medidas como: 1, 31 mm;
6, 42 mm; 121, 04 mm; 1, 19 mm; 1, 07 mm; etc.
pleta a leitura da medida.
Por exemplo, para um nônio de
Na gura 0.2 estão indicadas algumas preocupações que devem ser tomadas ao medir
com o paquímetro.
Por exemplo, as escalas devem ser lidas perpendicularmente ao
instrumento, e de frente, evitando-se o
erro de paralaxe
3
ou de
visada.
Figura 0.2:
Precauções ao medir com o paquímetro.
Micrômetro
Outro instrumento usado para realizar medidas com melhor resolução do que a régua
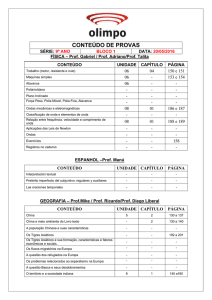
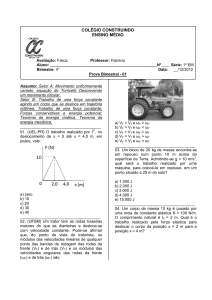
milimetrada é o micrômetro (gura 0.3), que permite executar medições de até milésimos
de milímetro (mícron,
Figura 0.3:
µm = 10−6 m;
plural: micra).
O micrômetro, instrumento de medida empregado para realizar medidas lineares com leituras de até milésimos de milímetro, e suas partes principais.
As leituras são do tipo X, XX0 mm; X, XX1 mm; X, XX2 mm; etc. Se o
micrômetro possuir nônio o último algarismo signicativo poderá ser lido,
caso contrário, deverá ser estimado.
4
É constituído de um parafuso especial chamado de parafuso micrométrico, cujo passo
é de 0, 5 mm por volta completa. No corpo do instrumento há uma escala graduada em
0, 5 mm (escala xa) e uma escala circular graduada em 0, 01 mm, a leitura dos micrômetros pode ser lida a olho, ou, se houver um nônio, como o mostrado na gura 0.4, pode
ser lida diretamente na coincidência dos traços.
Figura 0.4:
Micrômetro com nônio (esquerda) e sem nônio (direita).
Como medir com o micrômetro
(a)
posicione a peça entre as faces da ponta xa e da ponta móvel;
(b)
gire o tambor até que as faces encostem-se à peça delicadamente, para tanto pode-se
fazer uso do parafuso de fricção (tambor com catraca);
(c)
leia o valor do traço da escala xa (0, 5 mm) anterior ao tambor com escala;
(d)
leia o traço da escala móvel (0, 01 mm) no tambor, localizado logo abaixo da linha
horizontal da escala xa;
(e)
0, 001 mm. Por exemplo, todas as medidas devem ser do tipo:
1, 000 mm; 2, 012 mm; 2, 501 mm, etc, onde o valor sublinhado será suposto, ou lido
avalie o valor em
na escala do nônio (se houver).
Equipamento/Material
1. Doze pequenos corpos de acrílico com formato esfericamente imperfeito;
2. Micrômetro com escala de
0, 01 mm
(sem nônio);
3. Chapa metálica;
5
4. Paquímetro com escala de
0, 05 mm;
5. Balança digital.
Procedimentos
1ª Parte
(a)
Meça o diâmetro das esferas com o micrômetro, e anote os valores na Tabela 1.
(b)
Siga as instruções e responda às questões do relatório experimental.
2ª Parte:
(a)
Meça a massa da chapa metálica com a balança digital e anote o valor na Tabela 2.
(b)
Meça as dimensões
L1 , L2
e
L3
da chapa metálica com o paquímetro e anote os
valores na Tabela 2.
(c)
Siga as instruções e responda às questões do relatório experimental.
6
1 MOVIMENTO BIDIMENSIONAL
1.1 Objetivos:
Vericar que o movimento de projétil (simulado por uma esfera molhada de tinta que
rola sobre uma folha de papel milimetrado em um plano inclinado) é um movimento
curvilíneo bidimensional.
Medir grandezas físicas associadas à trajetória marcada no
papel e obter, a partir de um gráco linear, o valor da velocidade inicial da esfera lançada
horizontalmente sobre um plano inclinado. Analisar a cinemática do movimento da esfera
e entender o alcance do projétil.
1.2 Teoria:
O movimento de um corpo é curvilíneo quando sua trajetória é uma curva. Considere um
projétil (esfera) de massa
m
lançado com velocidade inicial
um plano inclinado que forma um ângulo
θ
vo ,
horizontalmente, sobre
com o solo, de modo que sua trajetória ca
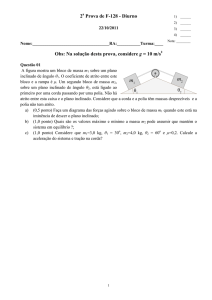
marcada em uma folha de papel milimetrado, colocado sobre esse plano. O referencial
ou sistema de coordenadas mais conveniente para tratar esse movimento, está orientado
conforme a gura 1.1 abaixo. A origem é escolhida exatamente no ponto em que o projétil
toca o papel milimetrado pela primeira vez: (xo ,
yo , z o )
= (0,
0, 0).
O movimento do
projétil pode ser analisado independentemente, em cada uma das três direções:
X, Y
e
Z.
Figura 1.1:
Representação do sistema de coordenadas utilizado para o estudo do movimento do projétil (trajetória marcada na folha de papel milimetrdo) sobre o
plano inclinado. O eixo ox é positivo para a direita, e o eixo oy é positivo
para baixo, a partir da origem. O valor de z = 0 mantém-se durante toda a
trajetória, por isto o movimento é bidimensional.
7
1 MOVIMENTO BIDIMENSIONAL
Direção ox:
Não há força alguma atuando sobre o projétil nessa direção, logo sua ace-
leração é nula e o movimento é retilíneo uniforme. A posição do projétil é, então,
dada por
x(t) = xo + vox t ,
sendo que, neste experimento,
Direção oy :
xo = 0,
e
(1.1)
vox = vo .
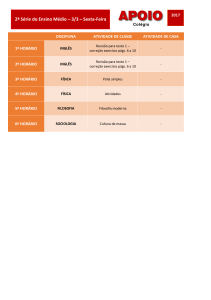
A única força atuante sobre o projétil é a componente da força peso
mgsenθ,
py =
responsável pela aceleração do projétil nessa direção, conforme mostrado
na gura 2 abaixo. De acordo com a 2ª Lei de Newton
ΣFy = py = may ,
ou seja
ay = gsenθ .
Então, a coordenada de posição
y
do projétil varia no tempo segundo a equação
1
y(t) = yo + voy t + ay t2 ,
2
As condições iniciais do experimento fornecem
Direção oz :
yo = 0
(1.2)
e
voy = 0.
As forças atuantes sobre o projétil são a componente da força peso
mgcosθ,
e a força normal
N,
exercida pela superfície do plano.
pz =
Como não há
oz , a resultante das forças nessa direção é nula, isto
é, pz = N . A componente da velocidade inicial na direção oz é nula (voz = 0), e a
2ª Lei de Newton leva a az = 0, ou seja, o movimento do projétil é de repouso na
direção oz .
movimento ao longo da direção
Concluindo, o movimento do projétil ocorre apenas no plano
xy
sendo, portanto, bidi-
mensional.
Figura 1.2:
Diagrama de forças para o projétil em movimento sobre o plano inclinado. O
eixo ox está entrando na página, no centro da esfera.
8
1 MOVIMENTO BIDIMENSIONAL
1.3 Descrição do Experimento
O equipamento utilizado neste experimento é um plano inclinado ao qual é axada uma
folha de papel milimetrado. Uma esfera banhada em tinta é liberada sobre uma canaleta
metálica alinhada horizontalmente com a parte superior do plano inclinado.
Ao rolar
da canaleta a esfera toca o papel milimetrado em um ponto inicial e, sob a ação da
gravidade, descreve uma trajetória parabólica que ca pintada no papel.
A partir da
curva bidimensional (trajetória) obtida no papel milimetrado extraem-se dados para determinar a velocidade inicial da esfera, através da análise cinemática do movimento de
projétil.
1.4 Equipamento/Material
1. Plano inclinado.
2. Nível de bolha.
3. Suporte com caneleta.
4. Esfera de aço.
5. Tinta.
6. Fita adesiva.
7. Papel milimetrado.
8. Transferidor.
1.5 Procedimentos
(a)
Nivele horizontalmente a aresta superior do plano inclinado com o nível de bolha.
(b)
Prenda com ta adesiva uma folha de papel rascunho (tamanho A4) sobre o plano
inclinado.
(c)
Regule a caneleta para que a esfera seja lançada na direção horizontal
que
vox = vo
e
voy = 0),
ox (assegure-se
de forma que sua trajetória aproveite da melhor forma
possível a folha de papel.
(d)
Faça vários lançamentos sobre o rascunho, até descobrir a melhor posição para soltar
a esfera na canaleta.
(e)
Substitua o rascunho por uma folha de papel milimetrado e faça um único lançamento.
9
1 MOVIMENTO BIDIMENSIONAL
(f)
Considere como a origem do sistema de coordenadas o ponto onde a esfera toca o
papel milimetrado inicialmente. Cuide para que esse ponto esteja dentro da região
quadriculada do papel. A partir desse ponto trace os eixos ordenados conforme a
gura 1.1.
(g)
Meça a base e a altura do plano inclinado e anote na folha de relatório.
(h)
Selecione pontos igualmente espaçados sobre a trajetória, faça a leitura das coordenadas (x,
y ) desses pontos e anote na Tabela 1 da folha de relatórios.
próximos à origem.
(i)
Siga as instruções e responda às questões da folha de relatório.
10
Evite pontos
2 CÁLCULO DO MOMENTO DE
INÉRCIA
2.1 Objetivos
Medir indiretamente o momento de inércia de um disco, com relação a um eixo que atravessa o centro de massa, perpendicularmente à superfície do disco. Analisar os movimentos
de um bloco em queda e de um disco do ponto de vista do princípio de conservação da
energia. Vericar que parte da energia potencial de um bloco em queda transforma-se
em energia cinética de rotação de um disco. Medir grandezas físicas diretas, associadas
aos movimentos de um bloco e de um disco, e calcular, a partir dessas medidas e de
considerações cinemáticas, o valor do momento de inércia do disco.
2.2 Teoria
O momento de inércia de um corpo não pode ser medido diretamente, pois, no mínimo é
necessário medir sua massa e um comprimento (por exemplo, o raio). Isto signica que, se
o corpo for simétrico com relação ao eixo de rotação, é preciso, pelo menos, multiplicar a
massa e o quadrado da medida de comprimento. Por outro lado, é possível fazer a medida
indireta do momento de inércia de um corpo, colocando-o em rotação em torno de um
dado eixo, e medindo grandezas físicas diretas, tais como massa, tempo, comprimento,
etc. É óbvio que, nesse caso, será necessária a realização de cálculos baseados em equações
conhecidas, usando as medidas diretas obtidas.
Considere um bloco de massa
m,
preso a um o inextensível, inicialmente enrolado
em torno de uma polia de massa desprezível (com relação à massa do disco, isto é,
mpolia << M ),
com raio
r.
A polia pode girar em torno do mesmo eixo que atravessa o
centro de massa de um disco de massa
M
e raio
conforme gura 2.1.
11
R,
perpendicularmente à sua superfície,
2 CÁLCULO DO MOMENTO DE INÉRCIA
Figura 2.1:
(a) Vista frontal da montagem experimental. (b) Vista lateral da montagem
experimental. A queda do bloco produz um torque sobre a polia, que coloca o
conjunto (disco + eixo + polia) em rotação com a mesma velocidade angular
instantânea. Note que, no caso, despreza-se o momento de inércia da polia,
isto é, Ipolia << Idisco .
O bloco é liberado de uma altura
h
de tal modo que, ao atingir o solo, o o tenha
se desenrolado completamente da polia. De acordo com o princípio de conservação da
energia, o bloco, durante a queda, perde energia potencial gravitacional que, descontandose a energia consumida pelo atrito, é transformada em energia cinética de translação do
bloco e energia cinética de rotação do disco. Sendo
I
o momento de inércia do disco, e
desprezando-se a energia consumida pelo atrito, o princípio de conservação de energia,
nesse caso, pode ser escrito como:
1
1
mgh = mv 2 + Iω 2 ,
2
2
onde
v
é a velocidade do corpo que cai,
g
(2.1)
é o valor local da aceleração da gravidade, e
ω
é a velocidade angular do disco (a mesma da polia, pois são solidários). A velocidade de
queda do bloco é igual à velocidade tangencial da polia, isto é,
v = ωr.
É possível medir
experimentalmente as grandezas físicas que aparecem na equação 2.1 e, então, calcular
o valor do momento de inércia
I.
Entretanto, esse resultado teria um erro devido à
desconsideração do atrito que, na prática, sempre existe.
Portanto, devemos levar em
conta a quantidade de energia que é consumida pelo atrito.
Suponhamos que o atrito atua sobre o eixo de rotação e é responsável por uma taxa
constante
f
de consumo de energia, enquanto houver rotação. Assim, durante o intervalo
de tempo de queda
t
do bloco, a energia consumida será
12
f t.
O princípio de conservação
2 CÁLCULO DO MOMENTO DE INÉRCIA
de energia, nesse caso, pode ser escrito como:
1
1
mgh = mv 2 + Iω 2 + f t .
2
2
Durante o intervalo de tempo
t',
(2.2)
medido entre o instante em que o o se desenrola
completamente da polia e o instante em que o disco pára, a energia consumida será
f 0 t0 .
Isto signica que a energia cinética de rotação que o disco possui quando o o se solta
da polia vai ser totalmente consumida pelo atrito durante esse intervalo de tempo. O
princípio de conservação de energia, nesse caso, pode ser escrito como:
1 2
Iω = f 0 t0 .
2
(2.3)
Pode-se obter uma única equação, considerando-se que a taxa de consumo de energia
é a mesma nas equações 2.2 e 2.3, ou seja,
f0 = f.
2.3 Descrição do experimento
O equipamento utilizado neste experimento é um disco metálico montado com rolamentos
em um eixo horizontal ao qual está presa uma pequena polia. Na reentrância periférica da
polia enrola-se completamente um o em cuja extremidade está preso um bloco metálico.
Esse bloco, quando o o esteja completamente enrolado, deve estar a uma certa altura do
solo. O bloco é liberado a partir do repouso, de modo que o o se desenrole completamente
da polia no instante em que o bloco atinge o solo. A queda do bloco faz o conjunto (disco
+ eixo + polia) rotacionar.
2.4 Equipamento/Material:
1. Suporte vertical preso à bancada.
2. Disco metálico com rolamentos em um eixo.
3. Polia metálica.
4. Fio.
5. Bloco metálico.
6. Trena.
7. Paquímetro.
8. Dois cronômetros.
9. Balança digital.
13
2 CÁLCULO DO MOMENTO DE INÉRCIA
2.5 Procedimentos
(a)
Enrole, completamente na polia, o o de nylon que prende o bloco metálico.
(b)
Fixe o eixo de rotação ao suporte vertical de modo que, estando o bloco no chão e
o o completamente esticado na vertical, que tangente à polia. Ou seja, o bloco
deve atingir o solo no mesmo instante em que o o se desprender completamnete
da polia.
(c)
Meça essa altura (distância entre a base do bloco e o solo) e anote-a na Tabela 2.
(e)
Meça, com o paquímetro: o raio da polia; com a balança: a massa do bloco; e com
a régua milimetrada: o raio do disco. Anote as medidas na Tabela 2.
(f)
Enrole o o na polia e coloque o bloco na altura inicial ajustada no procedimento
(b).
(g)
Solte o bloco no mesmo instante em que aciona o primeiro cronômetro.
Quando o bloco atinge o solo trave a contagem de tempo do primeiro cronômetro,
no mesmo instante em que aciona o segundo cronômetro.
(h)
Quando o disco parar de girar trave a contagem de tempo do segundo cronômetro.
(i)
Anote esses intervalos de tempo na Tabela 1.
(j)
Repita os procedimentos
(f ), (g), (h)
e
(i)
tantas vezes quantas forem necessárias
para preencher a Tabela 1 do relatório experimental.
(k)
Siga as instruções e responda às questões do relatório experimental.
14
3 LEI DE HOOKE
3.1 Objetivos
Determinação da constante elástica de uma mola helicoidal. Vericação da Lei de Hooke.
3.2 Teoria
Todos os corpos sob ação de uma força de tração ou de compressão deformam-se. Ao
aplicarmos uma força em uma mola helicoidal, ao longo de seu eixo, ela será alongada
ou comprimida. Se, ao cessar a atuação da força externa, a mola recuperar a sua forma
original, diz-se que a deformação é elástica. Em geral, existem limites de força a partir do qual acontece uma deformação permanente no corpo, sendo denominada região
de deformação plástica.
Dentro do limite elástico há uma relação linear entre a força
externa aplicada e a deformação. É o caso de uma mola helicoidal pendurada por uma
de suas extremidades enquanto que a outra sustenta um corpo de massa
uma elongação
x
m,
provocando
na mola. Na presente situação considera-se que a massa da mola será
considerada desprezível.
Dentro do limite elástico, a força
pendurado, isto é, a elongação
Utilizando a 2ª Lei de Newton
F
existente na mola será igual ao peso do corpo
x será diretamente proporcional a força restauradora F .
ΣF = ma escrevemos, para a situação de equilíbrio,
k (L − Lo ) − mg = 0 ,
kx = mg
onde
k
(3.1)
é uma constante que depende do material de que é feita a mola, da sua espessura,
de seu tamanho, denominada constante elástica da mola Na equação 3.1
mento natural da mola estando o corpo de massa
m
pendurado.
Lo
L
é o compri-
é o comprimento
natural da mola, ou seja, seu comprimento quando nenhuma força é aplicada..
3.3 Descrição do experimento
O equipamento a ser utilizado é um suporte vertical no qual uma mola helicoidal é
pendurada numa de suas extremidades, estando a outra livre. Nesta extremidade livre,
pendura-se um suporte com diferentes massas para produzir diferentes deformações na
mola, ou seja, alterar os comprimentos da mola. Estes comprimentos são, então, medidos,
para as diferentes massas colocadas no suporte.
15
3 LEI DE HOOKE
3.4 Equipamento/Material Utilizado
1. Haste.
2. Mola helicoidal.
3. Régua milimetrada.
4. Suporte para massas.
5. Massas de
10g
e de
50g.
3.5 Procedimentos
(a)
Monte a experiência conforme a gura 3.1. Pendure a mola na haste de sustentação
e ajuste o cursor superior da régua na extremidade superior da mola. Desloque o
cursor inferior am de medir o comprimento natural da mola,
Lo .
Anote o valor
na folha de relatório.
(b)
Pendure o gancho (suporte para as massas) na mola e leia o novo valor do comprimento da mola,
(c)
L,
ajustando o cursor inferior na extremidade da mola.
Utilize diferentes valores de massa e calcule, em cada caso, o valor do comprimento
da mola, anotando os valores na tabela da folha de relatório.
(d)
Responda as questões do relatório.
Figura 3.1:
Montagem experimental.
16
4 LEI DE NEWTON - Parte I
4.1 Objetivo
Determinar experimentalmente a aceleração de um carrinho sob ação de uma força constante e o valor desta força. Calcular os valores teóricos da aceleração do carrinho e da
força que o acelera, através de um diagrama de corpo livre e comparar os resultados
obtidos com o experimento.
4.2 Teoria
O movimento de um corpo é retilíneo para um observador em um determinado referencial, quando percorre uma trajetória retilínea em relação a este referencial, podendo
esta trajetória ter uma direção horizontal. As grandezas físicas vetoriais deslocamento
(x), velocidade (v ) e aceleração (a) têm a mesma direção do movimento. O termo uniformemente variado refere-se à variação da velocidade, ou seja, para intervalos de tempo
iguais, as variações de velocidade são iguais. No
MRUV
valem as seguintes equações que
relacionam as grandezas posição, velocidade, aceleração e tempo:
1
x = xo + vo t + at2 ,
2
v = vo + at ,
(4.1)
v 2 = vo2 + 2a (x − xo ) .
onde
xo
e
vo
são os valores iniciais da posição e velocidade respectivamente. Esta equação
de movimento pode ser obtida através o uso da 2ª Lei de Newton, quando a partícula
em questão estiver sujeita a uma força constante.
4.3 Equipamento/Material utilizado
1. Marcador de tempo e fonte de tensão.
2. Trilho e polia.
3. Carrinho.
4. Fio.
5. Suporte de massas.
6. Fita.
17
4 LEI DE NEWTON - Parte I
4.4 Descrição do experimento
(a)
Construindo
a ta de gravação :
recorte aproximadamente
95 cm de comprimento de
ta veda-rosca esticando-a sobre a bancada de trabalho e xe sobre ela a mesma
medida de ta durex. Observe se a largura será de acordo com o pedaço de tapadrão xado sobre o trilho.
(b)
Fixe uma polia numa das extremidades do trilho, conforme mostra a gura 4.1.
Posicione o trilho de tal maneira que esta extremidade coincida com o nal da
bancada.
(c)
Coloque o marcador de tempo na outra extremidade do trilho, como também aparece
na gura 4.1. Certique-se que a fonte de tensão esteja desligada, e que o mesmo
esteja conectado a saída de
(d)
6V ∼.
Deslize um pedaço da ta de gravação através das guias do marcador de tempo
deixando a parte da ta veda-rosca voltada para o marcador. Use ta adesiva para
unir a ta de gravação ao carrinho.
(e)
Aperte totalmente o parafuso nivelador do trilho para compensar a força de atrito
do carrinho sobre o trilho. Se necessário, use o nivelador de bolha.
(f)
Una um pedaço de barbante ao carrinho, como mostrado na gura 4.1. Pendure o
suporte de pesos e coloque mais
(g)
10 g.
Faça alguns testes, soltando o carrinho sem ligar a fonte de tensão para vericar o
alinhamento do carrinho-ta com o marcador. Pare-o ao nal do trilho.
(h)
Finalmente, ligue a fonte de tensão e solte o carrinho, parando-o ao nal do trilho.
Note que o movimento do carrinho cou registrado em forma de pontos na face da
ta veda-rosca. Use esta ta para responder as questões do relatório.
fita
carrinho
suporte com peso
marcador de tempo
Figura 4.1:
polia
Montagem experimental.
18
5 CINEMÁTICA UNIDIMENSIONAL
5.1 Objetivo
Calcular a aceleração da gravidade local, através do estudo da queda livre de um objeto.
5.2 Teoria
Quando uma partícula é submetida a uma força, constante ou não, ela é acelerada na
direção e no sentido desta força. No caso de uma partícula solta do repouso a única força
atuando sobre ela é seu próprio peso, desconsiderando-se a força de resistência do ar.
Neste caso, a aceleração de queda da partícula é a própria aceleração da gravidade,
g.
Medidas da posição de uma partícula em queda livre para diferentes instantes de tempo
permitem a construção de um gráco
y×t
do qual obtemos informação a respeito do
tipo de movimento descrito pela partícula.
5.3 Equipamento/Material utilizado
1. Marcador de tempo e fonte de tensão.
2. Fio.
3. Massas de
50
gramas.
4. Fita.
5.4 Descrição do Experimento
(a)
Coloque o marcador de tempo próximo a extremidade da bancada, conforme mostrado
na gura 5.1. Certique-se que a fonte de tensão esteja desligada, e que o mesmo
esteja conectado a saída de
(b)
6 V ∼.
Construindo a ta de gravação :
recorte aproximadamente
100cm
de comprimento
de ta veda-rosca com auxílio da tesoura e régua. A largura será de acordo com o
pedaço de ta-padrão. Cole as extremidades da ta de gravação com ta adesiva
(durex).
19
5 CINEMÁTICA UNIDIMENSIONAL
(c)
Estique a ta de gravação através das guias do marcador de tempo, de modo que o
marcador marque sobre a parte de veda-rosca, segurando-a pela extremidade superior. Use ta adesiva para xar um bloco de massa de
50
gramas na extremidade
inferior da ta de gravação.
(d)
Puxe a ta de gravação para cima tanto quanto for possível, segurando-a na vertical.
Coloque um pedaço de esponja no chão, para amortecer a queda do bloco.
(e)
Faça alguns testes, soltando a ta de gravação sem ligar a fonte de tensão.
(f)
Finalmente, ligue a fonte de tensão e solte a ta de gravação. Observe que o movimento de queda livre do bloco cou registrado em forma de pontos na ta de
gravação. Use-a para responder as questões do relatório.
Figura 5.1:
Montagem experimental.
20
6 COLISÃO INELÁSTICA
6.1 Objetivo
Obter o coeciente de restituição entre uma bola e o chão.
6.2 Teoria
Uma colisão entre dois corpos pode ser classicada considerando-se a energia cinética
do conjunto antes e depois da colisão.
Se a energia cinética do conjunto se conserva,
a colisão é chamada totalmente elástica; se parte da energia cinética se transforma em
outra forma de energia, a colisão é inelástica. Quando os dois corpos permanecem unidos
após a colisão, esta é dita totalmente inelástica. Considere uma bola que, sendo solta
do repouso da altura inicial
Hi ,
chega ao chão com uma velocidade
vi .
Imediatamente
após o contato com o chão, a bola se deforma e segue sofrendo uma compressão, até
atingir o repouso (situação de compressão máxima). A partir desse instante, ela passa
a se expandir e salta, com velocidade até uma outra altura. Observe que, em geral, a
bola deixa o chão com uma velocidade
o chão, alcançando uma altura
Hf
vf ,
que é menor que a velocidade ao colidir com
menor do que a altura inicial da qual ela foi solta. A
gura 6.1 ilustra esta situação.
Hi
Hf
vf
vi
Figura 6.1:
A bola cai de uma distância Hi e chega ao solo com velocidade vi . Após a
colisão, ela sai com velocidade vf atingindo a altura Hf .
21
6 COLISÃO INELÁSTICA
Deni-se o coeciente de restituição,
r,
de uma colisão desse tipo como
|vf |
.
|vi |
r=
(6.1)
O coeciente de restituição pode ser utilizado como um indicativo de quão elástico é o
choque entre um corpo e a superfície. A perda de energia cinética nessa colisão é dada
pela diferença entre a energia cinética do corpo ao colidir com o chão e a energia cinética
do mesmo ao deixar o chão, ou seja
1
1
∆K = mvf2 − mvi2 ,
2
2
(6.2)
que, em termos do coeciente de restituição, pode ser colocada na forma
1
∆K = mvi2 r2 − 1 .
2
(6.3)
Observe que esta variação de energia cinética é negativa, indicando uma perda de energia
cinética. Na realidade, esta perda corresponde, sicamente, a uma transformação de
energia cinética em outras formas de energia durante a colisão. As equações 6.1 e 6.3
mostram que, numa colisão totalmente elástica
r = 1
conservação da energia cinética durante a colisão.
levando a
∆K = 0,
indicando
Numa colisão inelástica, devido a
transformação de parte da energia cinética em outras formas de energia, a velocidade de
vf , é menor do que a velocidade de chegada ao
∆K < 0, como havíamos comentado linhas acima.
saída do chão,
e, portanto,
chão,
vi ,
o que dá
Vamos analisar a situação em termos de energia potencial gravitacional
1
potencial gravitacional no momento em que a bola é solta vale
com o chão, a bola retorna à altura
Uf = mgHf .
Hf
U.
Ui = mgHi .
r<1
A energia
Após colidir
onde sua energia potencial gravitacional vale
Logo, a variação de energia potencial na colisão vale
∆U = mg (Hf − Hi ) ,
que também é negativa, pois
Hf < Hi .
(6.4)
Considerando que a energia mecânica se conserva
entre o instante inicial quando a bola foi solta e o momento imediatamente anterior ao
choque, podemos escrever
mgHi = 12 mvi2 ,
o que dá para a variação de energia cinética
∆K = mgHi r2 − 1
.
(6.5)
Igualando a variação da energia cinética, Eq. 6.5, com a variação da energia potencial
gravitacional, 6.4, obtemos
mgHi r2 − 1 = mg (Hf − Hi ) ,
ou seja,
r2 =
Hf
,
Hi
(6.6)
dando o coeciente de restituição em termos da variação de altura antes e após a colisão
da bola com o chão. Desta forma, a altura que a bola atinge após colidir com o chão
será sempre uma fração xa da altura inicial da qual ela caiu.
1
Considera-se o nível zero de energia potencial gravitacional no chão.
22
6 COLISÃO INELÁSTICA
6.3 Equipamento/Material Utilizado
1. Fita métrica.
2. Bola.
6.4 Procedimentos
(a)
Antes de começar suas medidas, treine um pouco a maneira de observar e medir para
possibilitar um melhor resultado, com menor erro.
(b)
Deixe a bola cair de uma altura
H1
Ho
de aproximadamente
vezes e determine a média da altura
(c)
2
metros e anote a altura
atingida após a primeira colisão inelástica com o solo. Repita a operação cinco
H1
atingida e o desvio médio da mesma.
Em seguida, solte a bola dessa altura média
segunda altura
H2
H1
e determine a média de
após a segunda colisão.
Faça o procedimento acima para as
colisões, anotando os dados na Tabela 1 da folha de relatórios.
(d)
H2 .
Essa
seria, num processo continuado, a altura que a bola atingiria
Responda as demais questões da folha de relatórios.
23
6
(seis) primeiras
7 MEDIDAS DE FORÇA
7.1 Objetivo
Estudar as forças que atuam sobre um objeto estando este em equilíbrio estático.
7.2 Teoria
A
2a Lei de Newton permite tanto o estudo da dinâmica das partículas quanto da estática,
bastanto para isto, que seja imposta a condição de aceleração nula com velocidade inicial também nula. No entanto, para o caso de corpos cujas dimensões não possam ser
desprezadas, além da condição acima, também deve ser considerado que o momento
resultante de todas as forças seja igualmente nulo.
Portanto, a condição de equilíbrio
estático para corpos rígidos pode ser assim resumida:
ΣF~
= ~0 ,
Σ~τ = ~0 .
Considerado que o corpo rígido apresenta movimentos de translação no plano
qualquer rotação ocorra apenas em torno do eixo
oz ,
xy
e que
as duas equações acima nos dão
três equações escalares, a saber
ΣFx = 0 ,
ΣFy = 0 ,
Στz = 0 .
No caso de corpos com dimensões desprezíveis (partícula) a terceira equação pode ser
desconsiderada.
7.3 Equipamento/Material utilizado
1. Placa circular com medidas de ângulos.
2. Rolos de desvios.
3. Fios.
4. Conjuntos de pesos.
24
7 MEDIDAS DE FORÇA
7.4 Procedimento Experimental
(a)
Escolha aleatoriamente diversos valores de massa e as coloque nos três suportes
disponíveis.
(b)
Monte o aparato experimental mostrado na gura 7.1.
(c)
Gire os suportes com roldana até encontrar a correta posição de equilíbrio do anel
branco, o que ocorre quando o centro do mesmo coincide com o centro da roda.
(d)
Meça os três ângulos entre os os e anote os valores na tabela da folha de relatórios.
(e)
Responda as questões da folha de relatório.
Figura 7.1:
Montagem experimental.
25
8 FLEXÃO DE UMA HASTE
8.1 Objetivo
Encontrar a constante de exão de uma haste metálica no regime elástico.
8.2 Teoria
Todo objeto sob a ação de uma força externa, de tração ou de compressão, se deforma.
Se, ao cessar a atuação dessa força o corpo recuperar sua forma inicial, se diz que a
deformação é elástica.
Em geral, existe um limite para o valor da força a partir do
qual acontece uma deformação permanente no corpo, também chamada de deformação
plástica.
Dentro do limite elástico, há uma relação linear entre a força aplicada e a
deformação. Consideremos o caso de uma haste presa por uma de suas extremidades,
como mostrada na gura 8.1 abaixo. Se aplicarmos uma força
livre, esta provocará uma exão
y
na haste.
F
vertical na extremidade
A exão dependente do valor da força
aplicada, do material e da forma geométrica da haste. Dentro do limite elástico, teremos
F = ky ,
(8.1)
k , é uma propriedade da haste como um todo e depende
x, largura l e espessura e), além de depender do tipo de
feita. O módulo de Young para a exão E , por outro lado, é
sendo que a constante elástica,
de suas dimensõe (comprimento
material do qual a haste é
uma propriedade apenas do material. Essas duas grandezas estão relacionadas por
k=
Ele3
,
x3
F =
Ele3
y .
x3
que, levada na equação 8.1, dá
Assim, em um experimento, é possível medir a exão
comprimento
x,
(8.2)
y
de uma haste em função de seu
mantendo-se todas as outras grandezas constantes.
8.3 Equipamento/Material Utilizado
1. Haste metálica.
2. Fixadores.
26
8 FLEXÃO DE UMA HASTE
3. Suporte.
4. Suporte com massas.
5. Paquímetro.
8.4 Procedimento Experimental
O experimento consiste em aplicar uma força (F
a correspondente exão e em função do
de
= mg ) na extremidade da haste e medir
comprimento x, usando sempre o mesmo valor
F.
(a)
Inicialmente meça as dimensões da haste (l,
e),
preenchendo a Tabela 1 da folha de
relatório.
(b)
Para um valor de
30
x = 60, 00mm, pendure na extremidade da haste o bloco de massa
y com auxílio do paquímetro. Anote os
gramas (gura 8.1) e meça a exão
valores na Tabela 1.
(c)
Mude o valor de
(d)
Repita o procedimento acima em número suciente para denir experimentalmente
x
de forma crescente e meça a exão correspondente.
a relação entre estas duas grandezas.
(e)
Responda as questões do relatório.
Figura 8.1:
Deformação y de uma haste metálica sujeita a ação de uma força F .
27
9 MOVIMENTO DE TRANSLAÇÃO E
ROTAÇÃO
9.1 Objetivos
Medir a aceleração do centro de massa de um volante e sua velocidade no nal da calha
e comparar com resultados obtidos aplicando-se o modelo teórico de corpo rígido. Determinar o valor de
g
e o momento de inérica do volante.
9.2 Teoria
O modelo de corpo rígido, consiste em considerar o volante como um corpo rígido que
rola por um plano inclinado, sem deslizar, apresentando o movimento combinado de
translação e rotação. Se considerarmos um volante rígido que rola sobre um plano inclinado formando um ângulo
θ
com a horizontal, como na gura 9.1, a aceleração angular
(α) é dada pelo torque resultante sobre o volante, ou seja,
Στ = Iα ,
onde
I
(9.1)
é o momento de inércia do volante em torno do eixo de rotação. Como o volante
desce o plano inclinado sem deslizar, seu movimento é um movimento de rolamento,
podendo ser descrito como uma rotação mais uma translação. Assim, podemos conceber
centro instantâneo
de rotação, ou seja, imaginemos um eixo perpendicular ao plano da gura 9.1, passando
o ponto de contato do volante com o plano inclinado como sendo o
pelo ponto de contato do volante com o plano inclinado.
A cada instante o volante
está girando em torno deste eixo (que se desloca plano abaixo). Pelo teorema dos eixos
paralelos,
I = ICM + mr2 ,
onde
r
é o raio do eixo do volante e
ICM
é seu momento de
inércia em torno de seu eixo.
Vamos considerar que o momento de inércia do volante seja simplesmente o momento
de inércia do cilindro maior. Neste caso
ICM = 21 mR2
e a equação 9.1 toma a forma
Στ = ICM + mr2 α .
(9.2)
Observe que, ao considerarmos o centro instantâneo de rotação como o ponto de contato
do volante com o plano inclinado, apenas a componente da força peso ao longo do plano
contribuirá para o torque resultante. Além disso, existe uma relação de vínculo entre a
distância percorrida pelo centro de massa do volante e o ângulo descrito pelo volante, a
saber,
a = rα.
Com estas informações, a equação 9.2 assume a forma
rmgsenθ =
1
a
mR2 + mr2
,
2
r
28
9 MOVIMENTO DE TRANSLAÇÃO E ROTAÇÃO
ou seja, a aceleração do centro de massa do volante ao descer pelo plano inclinado é
!
g
a=
senθ .
R2
2r2
1+
(9.3)
N
R
r
fat
θ
mg
Figura 9.1:
Diagrama de corpo livre para um volante que rola sobre uma calha inclinada.
9.3 Equipamento/Materia utilizado
1. Calha de madeira.
2. Suportes.
3. Volante.
4. Cronômetro.
5. Paquímetro e trena.
9.4 Procedimentos Experimental
(a)
Meça, com o auxílio de um paquímetro, os diâmetros do cilindro maior e menor do
volante. Anote os valores na Tabela 1 da folha de relatório.
(b)
Regule a inclinação da calha de maneira a obter, inicialmente, um ângulo de aproximadamente
3o
em relação a horizontal através de medidas da base e a altura do
plano inclinado. Anote na Tabela 1 da folha de relatório.
(c)
Meça três vezes o tempo gasto pelo volante para percorrer toda a extensão da calha
e determine o tempo médio para isto, anotando-o na Tabela 1 da folha de relatório.
Cuide para que o volante seja solto e role,
sem deslizar,
sobre toda a extensão do
plano inclinado.
(d)
Ajuste o ângulo de inclinação da calha de
repita o procedimento
(c)
2o
em
2o
até
13o .
Para cada inclinação
acima. Se o volante começar a deslizar, utilizar ângulos
menores. Responda as questões do relatório.
29
10 2ª LEI DE NEWTON - Parte II
10.1 Objetivo
Determinar experimentalmente a massa de um carrinho e comparar o valor obtido através
da medida direta com o uso de uma balança digital.
Determinar também o valor da
aceleração da gravidade.
10.2 Teoria
O movimento de qualquer partícula pode ser determinado usando-se a 2ª Lei de Newton.
Esta lei relaciona as forças que atuam na partícula com a taxa de variação do momento
linear. Sendo as forças grandezas vetoriais, então elas satisfazem o princípio da superposição, ou seja, a regra da soma do paralelogramo.
Assim, quando um conjunto de
forças são aplicadas numa partícula, é a resultante destas forças a responsável pelo seu
movimento, o que matematicamente é escrito como
ΣF~ =
onde
p~ = m~v
d~
p
,
dt
representa o momento linear da partícula,
(10.1)
m
a massa e
~v ,
a velocidade.
Quando a massa da partícula permanece constante, a equação 10.1 ca escrita na forma
usual
F~ = m~a.
Esta equação vetorial, em geral, fornece três equações algébricas (uma
para cada componente
x, y
e
z ).
Desta forma pode-se, conhecendo as forças que atuam
numa partícula, determinar sua aceleração e, a partir desta, a velocidade e a posição,
descrevendo completamente o movimento da partícula.
Quando desejamos estudar o
movimento de um corpo rígido também podemos fazer o uso da 2ª Lei de Newton considerando que o movimento geral do corpo é descrito através de uma combinação entre
um movimento de translação do centro de massa do corpo mais uma rotação do corpo
em torno do seu centro de massa. Quando existe apenas a translação do corpo rígido
este pode ser considerado como uma partícula com massa igual a massa do corpo e todas
as forças que atuam no corpo podem ser imaginadas como atuando no centro de massa
do mesmo.
Considere dois corpos rígidos, representados por blocos, de massa
unidos através de um o, como mostrado na gura 10.1 abaixo.
30
M
e
m
10 2ª LEI DE NEWTON - Parte II
T
M
T
m
mg
Figura 10.1:
Dois blocos unidos por um o.
Além destes dois blocos, existe a polia que possui massa.
composto por quatro objetos: bloco de massa
m
e o.
M,
Este sistema, então, é
polia de massa
mp
, bloco de massa
Em geral a massa do o é desprezível frente as demais massa e é assumido
que o o é inextensível. Os dois blocos apresentam movimento de translação, enquanto
que a polia apresenta um movimento de rotação em torno de seu centro de massa. Em
muitas situações, a massa da polia pode ser desprezada e o movimento do sistema pode
ser descrito apenas em termos do movimento dos dois blocos. Quando as superfícies em
contato são bem lisas e polidas, a força de atrito entre elas pode ser desprezada. Com
estas considerações, a descrição do movimento do sistema consiste em analisar as demais
forças que atuam em cada bloco, separadamente, e escrever a 2ª Lei de Newton para
cada um eles. Um diagrama de corpo livre, muitas vezes, é útil. Para os dois blocos da
gura 10.1 , obtém-se
T
= Ma ,
(10.2)
mg − T
= ma .
(10.3)
Observe que, sendo o o inextensível, massa da polia desprezível e as forças de atrito
desconsideradas, as acelerações dos blocos serão iguais, bem como as forças de tração
nas duas extremidades do o. A aceleração dos blocos é obtida resolvendo-se o sistema
acima. Obtém-se
a=
mg
.
m+M
Através desta equação é possível medir a aceleração
de
m,
permitindo a obtenção de
M
e de
(10.4)
a
g.
10.3 Equipamento/Material utilizado
1. Trilho.
2. Carrinho.
3. Suporte de massas.
31
do sistema para diferentes valores
10 2ª LEI DE NEWTON - Parte II
4. Fio.
5. Polia.
6. Cronômetro.
7. Trena.
10.4 Procedimento Experimental
(a)
Fixe uma polia numa das extremidades do trilho.
(b)
Posicione o trilho de tal maneira que esta extremidade coincida com o nal da
bancada.
Verique se o trilho está bem nivelado.
Se necessário, use o nível de
bolha.
(c)
Escolha uma distância
L ao longo do trilho para ser percorrida pelo carrinho.
Coloque
o carrinho sobre o trilho e mantenha-o em repouso.
(d)
Una um pedaço de barbante ao carrinho. Pendure o suporte de massa de
10g
na
outra extremidade do barbante.
(e)
Faça alguns testes, soltando o carrinho sempre da mesma posição inicial. Pare-o ao
nal do trilho. Observe que o carrinho percorre uma distância
L.
Anote na Tabela
1 da folha de relatório.
(f)
Finalmente, acione o cronômetro e, ao mesmo tempo, solte o carrinho, parando-o
ao nal do percurso escolhido e ao mesmo instante trave o cronômetro. Anote os
valores na Tabela 1 da folha de relatório.
(g)
Repita os procedimentos necessários para diferentes valores de massa no suporte.
32