EQUIPAMENTO ROBÓTICO PARA O ESTUDO DE CINEMÁTICA
Rodrigo Caitano Barbosa Da Silva1, Wellington Luiz Antonio1, Jonatan Alberto Cordeiro2,
Michael Lee Sundheimer3
1
UNIVERSIDADE FEDERAL RURAL DE PERNAMBUCO
Rua Dom Manoel de Medeiros, s/n, Dois Irmãos
52171-900 – Recife – PE
2
3
ESCOLA POLIVALENTE DE ABREU E LIMA
Rua Padre Miguel Ribeiro, s/n
53510-180 – Recife – PE
UNIVERSIDADE FEDERAL RURAL DE PERNAMBUCO
Departamento de Física
Rua Dom Manoel de Medeiros, s/n, Dois Irmãos
52171-900 – Recife – PE
Resumo A utilização de laboratórios de ensino de física nem
sempre é possível na sala de aula do ensino básico, pois o custo
alto dos equipamentos torna difícil a sua aquisição. Com o
intuito de superar esse problema, fez-se necessária a criação de
aparatos robôticos capazes de proporcionar o estudo da
cinemática básica, como movimento retilíneo uniforme e o do
movimento
acelerado.
Utilizou-se,
portanto,
o
microcontrolador
Arduino,
sensores
ópticos,
transmissor/receptor bluetooth, aparelho celular e materiais
recicláveis para a construção de um pequeno aparato robôtico.
Os equipamentos construidos permitem o estudo quantitativo
de cinemática básica, bem como de compreender graficamente
esses movimentos por meio de um aplicativo Android de
smartphone criado pelo grupo. Além disso, o aluno ganha
experiência com eletrônica através da montagem do circuito
eletrônico. Foi possível perceber que os resultados numéricos
alcançados na realização dos experimentos correspondem com
a teoria física dos dois tipos de movimento analisados.
Palavras Chaves: Robótica Educacional, Instrumentação,
Inclusão Digital, Arduino.
Abstract: The use of physics teaching laboratories is not
always possible in the elementary and high school classroom
due to the high cost of the equipment, which prohibits its
acquisition. With the goal of overcoming this problem, it was
necessary to create robotic apparatuses capable of studying
basic kinetics such as uniform and accelerated linear motion.
An Arduino microcontroller, optical sensors, transmitter receiver bluetooth, a smartphone and recyclable material were
used to construct small robotic apparatuses. The constructed
equipment permitted the quantitative study of basic kinetics, as
well as graphical comprehension of the movements via an
Android application for smartphone developed by the group.
In addition, the student gains experience with electronics by
mounting the electronic circuit. It was possible to perceive that
the numerical results obtained in the experiments agree with
the physical theory of the analyzed movements.
Keywords: Educational Robotics, Instrumentation, Digital
Inclusion, Arduino
1
INTRODUÇÃO
É notória a mudança mundial: tecnologias digitais cada vez
mais ganham espaço na sociedade, transformando a forma de
produção, geração e disseminação de conhecimentos. Livros
impressos são substituídos por digitais, o quadro negro perde
lugar para a lousa digital, os desafios propostos para resolver
com lápis e papel são trocados por montagens de robôs e
problemas computacionais, redes sociais fazem os deveres dos
discursos e debates.
Em 2005, um grupo de italianos lançou o Arduino, uma
plataforma totalmente aberta para criação e reprodução de
hardware e software, open source [ARDUINO®, 2016]. Como
toda robótica tem o seu “cérebro”, o Arduino é um micro
computador capaz de controlar pequenas coisas como ascender
um LED (diodo emissor de luz), ler sensores, escrever em
displays, controlar robôs e até grandes projetos como
automação residencial. Diferentemente dos Kits LEGO
Mindstorms, o Arduino oferece a possibilidade de utilização
dos componentes eletrônicos capazes de serem encontrados em
qualquer loja de eletrônica e não, por exemplo, um sensor que
vem todo encapsulado sem ao menos saber do que ele é
formado.
A utilização de robótica na sala de aula está baseada no
construtivismo de Piaget, que considera uma melhor
aprendizagem dos alunos quando eles estão ativos no processo
de ensino e no construcionismo de Seymour Papert, que
acredita numa melhor aprendizagem por parte do aluno,
quando ele cria um artefato concreto, especialmente quando
esse artefato trás uma relevância significante para o seu
cotidiano [PAPERT, 1991]. Papert foi um dos fundadores do
Artificial Intelligence Laboratory e do Média Laboratory,
ambos da MIT (Instituto de Tecnologia de Massachusetts),
considerado umas das pessoas fundamentais para o
desenvolvimento do kits de robótica educacional da LEGO,
tanto que a linha de produtos Mindstorms da LEGO foi
batizada baseado no livro do Papert, Mindstorms: Children,
Computers and Powerful Ideas, originalmente publicado em
1980 . [PAPERT, 1993].
Mostra Nacional de Robótica (MNR)
1
As aplicações da robôtica livre e de baixo custo são
diversificadas, dependendo da criatividade de cada projetista
existem
inúmeras
possibilidades
para
aplicar
o
microcontrolador arduino em atividades de ensino, um
exemplo de utilização está no trabalho realizado pelos alunos
do curso de Licenciatura Plena em Física da Universidade
Federal Rural de Pernambuco (UFRPE), no qual construíram
um aparato experimental utilizando o tubo de Kundt
(equipamento para ensaios acústicos) para medir a velocidade
de propagação do som no ar [Santos, et al, 2013]. Essa e outras
atividades mostram o quanto essas ferramentas tem se
mostrado requisitada quando se pretende trabalhar com
experimentos potenciais que levam a conexão de saberes em
sala de aula gastando muito pouco dinheiro.
Vivenciando essa utilização da ferramenta Arduino, esse
trabalho pretende demostrar um conjunto de aparato robótico
utilizando-se de microcontrolador Arduino, equipamentos
eletrônicos de baixo custo, materiais reciclaves e um aparelho
celular ou tablet para a realização de duas experiencias,
permitindo um estudo laboratorial do movimento uniforme e
do movimento em queda livre. O trabalho diferencia pela
criação do aplicativo Android que irá servir para mostrar os
dados arrecadados no experimento, bem como o gráfico dos
movimentos.
Este artigo encontra-se organizado da seguinte forma: na seção
2 apresenta a construção robôtica criada. A seção 3 descreve os
materiais e métodos do trabalho. Os resultados do trabalho são
mostrado na seção 4, e finaliza com na seção 5 com a
apresentação das concluções.
2
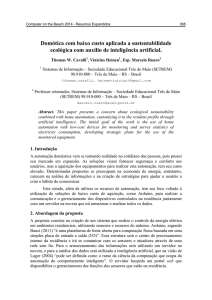
Figura 1: Circuito do sensor óptico TCRT5000.
Fonte: http://www.zerokol.com.
O projeto foi feito usando a plataforma Arduino, que é um
microcontrolador, cuja função é a prototipagem de códigos e
criação de circuitos elétricos. A placa Arduino contém pinos de
entrada e saída de dados, permitindo receber informações do
meio ambiente, captando leituras de sensores. O Arduino é
programado para registrar os instantes de tempo que os
sensores ópticos são acionados ao passar o objeto por ele.
Esses intervalos de tempo são enviados por bluetooth para um
aplicativo criado pelo grupo, que permite ver num smartphone
ou tablet, em tempo real, os dados obtidos na realização do
experimento e o gráfico da posição do objeto em função do
tempo. O aplicativo Android foi criado usando a plataforma
online para criação de aplicativo [MIT App Inventor] do
Massachusetts
Institute
of
Technology,
disponível
gratuítamente na internet (http://appinventor.mit.edu/explore/).
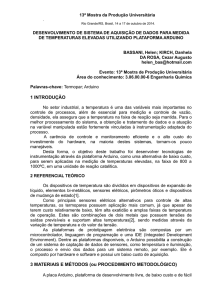
A Figura 2 mostra o circuito eletrônico usado no projeto, que é
usando tanto para o carrinho no trilho como para a Torre de
Pisa.
O TRABALHO PROPOSTO
A necessidade e interesse de querer entender alguns fenômenos
físicos, atrelada a dificuldade de encontrar equipamentos
laboratoriais de baixo custo, capaz de realizar experiemntos de
física para o estudo do movimento retilíneo uniforme e do
movimento acelerado (queda livre), levou o grupo a buscar
alternativas que possam ser eficientes e didáticas para o estudo
e compreensão do movimento com velocidade constante e
acelerado, buscando entender como as grandezas tempo e
deslocamento se comportam graficamente nesses dois tipos de
movimento.
O conjunto robôtico, desenvolvido no Laboratório de Pesquisa
em Ensino da Física da UFRPE, consta de dois aparatos
experiementais capazes de realizar o estudo do movimento
uniforme (velcidade constante) de um carrinho motorizado em
um trilho e o movimento acelerado de uma bola em queda livre
em frente a uma pequena replica da Torre de Pisa, em
referência ao famoso experimento de Galileu Galilei. O robô
tem com seu “cérebro” o microcontrolador Arduino que está
programado para enviar a um dispositivo celular os intervalos
de tempo captados nos momentos que sensores de luz
percebem a passagem do carrinho ou da bola, que são os
objetos utilizados em cada experimento.
O sensor óptico usado é o sensor óptico reflexível
[TCRT5000], que funciona emitindo luz infravermelha por um
LED, que é refletida quando objetos aproximan-se dele,
principlamente objetos bem reflexivos ou brancos. A luz
refletida é absorvida por um fototransistor capaz de absorver
luz infravermelha. Figura 2 mostra uma esquematização do
circuito desse componente.
Figure 2: Circuito Elétrico do Conjunto.
Fonte: Criado pelos autores usando software Fritzing.
Mostra Nacional de Robótica (MNR)
2.1
Estudo do Movimento Retilíneo
Uniforme (MRU)
O experimento criado permite a compreensão do movimento
uniforme linear e de visualizar e entender o gráfico da distância
versus tempo com velocidade constante. A Figura 3 mostra o
aparato para o estudo do MRU.
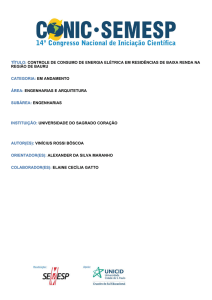
Figura 3: Aparato Robótico para o estudo do MRU.
O equipamento é composto por um carrinho motorizado
movido a duas pilhas AA com uma pequena bandeira branca de
papel para ativar os sensores, um trilho (segmento de armação
de divisória de paredes), quatro sensores ópticos TCRT5000
montados em corpos de marcadores de quadro branco e
espaçados ao longo da trilha, um Arduino alimentado com
bateria de 9 V, um transmissor/receptor bluetooth, protoboard,
4 resistores de 220 e 4 de 10 k e um smartphone ou tablet
com o aplicativo Android instalado. As posições dos sensores
foram obtidas manualmente por meio de uma trena métrica e os
tempos de passagem do carrinho foram captados a medida que
a bandeira passa por cada sensor óptico e enviados ao
smartphone por bluetooth.
2.2
Estudo do Movimento Retilíneo
Uniformemente Variado (MRUV)
O grupo desenvolveu um experimento que pode ser aplicado
para o aprendizado do conceito de movimento com aceleração
constante e o estudo do gráfico desse movimento acelerado no
ensino básico ou até no ensino superior. A Fígura 4 mostra uma
foto do aparelho desenvolvido.
Figura 4: Construção Robótica para o estudo do MRUV
O circuito, sensores e programação são os mesmos utilizado
para MRU só que neste caso os quatro sensores são espaçados
igualmente na torre, separados por uma distância de 15 cm de
um para o outro. Ao abandonar a bola muito próximo ao sensor
mais alto, ela começa a cair em MRUV. Os sensores captam o
instante que a bola passa em sua frente, e o Arduino envia
esses dados para o aplicativo.
3
MATERIAIS E MÉTODOS
Com os dois experimentos prontos, o grupo procurou verificar
o comportamento das duas situações analizadas para
compreender graficamente os movimentos retilíneo uniforme e
acelerado. Os primeiros testes foram feitos construindo uma
tabela com os valores das grandezas tempo e deslocamento. Os
instantes de tempo foram obtidos por meio da programação no
Arduino, já as posições foram obtidas manualmente por uma
trena métrica. Esses dados foram organizados em tabelas e por
meio do programa GeoGebra foi construido o gráfico da
posição em função do tempo. Um segundo momento ocorreu
com a aplicação desses experimentos em duas escolas públicas
na Região Metropolitana de Recife, Pernambuco, bem como no
minicurso “Introdução ao Arduino” na VII Semana de Física
da UFRPE . Na segunda fase, o grupo demostrou a realização
dos experimentos utilizando o aplicativo Android desenvoldido
pelo grupo para obter os dados experimentais e desenhar o
gráfico do movimento analizado no smartphone ou tablet.
4
RESULTADOS E DISCUSSÃO
Os resultados foram analizados para os dois movimentos, e
para cada um deles organizou-se os dados em tabelas e em
seguida representou graficamente a posição e os instantes de
tempo da passagem do objeto.
Na Tabela 1 tem-se os dados obtidos para o experimento sobre
o MRU, realizado no Laboratório de Pesquisa em Ensino da
Física da UFRPE.
Tabela 1 – Dados do Experimento MRU.
Pontos
Posição (m) Tempo (s)
P1
0
0
P2
0,2
0,368
P3
0,4
0,727
P4
0,6
1,067
O gráfico do MRU está apresentado na Figura 5, mostrando os
quatro pontos bem alinhados numa reta, permitindo concluir
que neste tipo de movimento a velocidade é constante e dada
pela inclinação da reta.
Figure 5: Gráfico da posição versus tempo MRU. A linha
vermelha é uma regressão linear de mínimos quadrados.
A função horária da posição é dada por
Mostra Nacional de Robótica (MNR)
3
( )
(1)
onde x é a posição do objeto, x0 é a posição inicial, v a
velocidade e t o instante de tempo. Comparando com a equação
obtida por regressão linear de mínimos quadrados do dados,
( )
(2)
onde posição é dada em metros, tempo em segundos e a
velocidade em m/s, podemos concluir que o carro tem uma
velocidade constante de 0,562 m/s.
O experimento para o estudo do MRUV também foi realizado
no Laboratório de Pesquisa em Ensino da Física da UFRPE. Os
dados obtidos no experimento estão mostrado na Tabela 2.
Tabela 2 – Dados do Experimento MRUV.
Pontos
Posição (m) Tempo (s)
P1
0
0
P2
0,15
0,150
P3
0,30
0,222
P4
0,45
0,278
O gráfico da Figura 6 mostra como as grandezas de posição e
tempo estão relacionadas. A equação cinemática para esse caso
é
( )
(3)
onde y é posição vertical do objeto, y0 e v0 são a posição e
velocidade inicial, respectivamente, g é a aceleração da
gravidade e t o instante de tempo.
Um ajuste polinomial de segunda ordem aos dados resulta em
( )
(4)
onde posição é dada em metros, tempo em segundos, a
velocidade em m/s, e a aceleração em m/s2.
Comparando as equações (3) e (4) resulta em um valor
experimental de g = 9,6 m/s2 , bem próximo ao valor aceito de
9,8 m/s2.
ensino fundamental um estudo aprofundado dos sensores,
motores e componentes eletrônicos, para melhor compreensão
dos princípios físicos de cada componente, explorando eles de
forma interdisciplinar. A utilização do conjunto de atividades
criadas pelo grupo pode minimizar a dicotomia entre a ciência
em sua essência e como ela é transmitida pelos processos
educativos atuais. Também serve como víeis importante para
se explorar metodologias pouco vivenciadas nas escolas, por
exemplo modelagem cientifica, interdisciplinaridade, entre
outras. Os dados obtidos experimentalemente permitem
verificar a fidelidade com a teoria física referente a cada
contexto analisado.
Agradecimentos: Jonatan Alberto Cordeiro agradece a UFRPE
e o CNPq pela concessão da bolsa de Iniciação Científica
Ensino Médio PIBIC-EM que permitiu a sua participação deste
trabalho. Rodrigo Caitano Barbosa da Silva e Wellington Luiz
Antonio realizaram esse trabalho na condição de bolsistas do
Programa de Educação Tutorial PET - Conexões de Saberes
“Ciranda da Ciência” da UFRPE.
REFERÊNCIAS BIBLIOGRÁFICAS
Arduino, Página oficial da Plataforma Arduino. Disponível em:
<http://www.arduino.cc/>. Acesso em: 02/07/2016.
Fritzing, Programa para criação de circuitos elétricos.
Disponível em <http://fritzing.org/>. Acesso em:
10/07/2016.
MIT App Inventor, Plataforma para criação de aplicativo
Disponível
em
<http://ai2.appinventor.mit.edu/>.
Acesso em: 10/07/2016.
Papert, S., “Situating Constructionism”, In Constructionism, I.
Harel e S. Papert, Eds, (1991). Disponível em
<www.papert.org>. Acesso em: 10/07/2016.
Papert, S., Mindstorms: Children, Computers and Powerful
Ideas, 2a ed., Basic Books, New York, NY, (1993).
Santos, I. A. X.; Souza, R. A. A.; Mendonça, A. L., Medida da
Velocidade do Som no Ar Utilizando Arduino e
Materiais de Baixo Custo. Simpósio de Iniciação a
Docência, UFRPE, 2013.
TCRT5000 - Reflective optical sensor. Disponível em:
<http://www.zerokol.com/>. Acesso em: 15/07/2016.
Figura 6: Gráfico da posição versus tempo de MRUV. A
linha vermelha representa a regressão polinomial de
segunda ordem.
5
CONCLUSÕES
Como foi observado, o grupo criou um conjunto robôtico para
realiazação de experimentos de física básica, explicitamente de
cinemática. Focou-se em criar instrumentos que possibilitem
compreender numericamente e graficamente os movimentos
retilíneos uniforme e acelerado, de maneira mais atrativa e
dinâmica. Sugere-se para trabalhos futuros com os alunos de
Mostra Nacional de Robótica (MNR)