TÓPICO
APLICAÇÕES À GEOMETRIA PLANA
33
3
Licenciatura em Ciências · USP/Univesp
Gil da Costa Marques
3.1 Introdução
3.2 Relações e Funções
3.3.1 Retas e Segmentos de retas no Plano
3.3.2 Posição relativa de duas retas
3.4.1 Ângulos e Medidas de Ângulos
3.4.2 Mais Sobre Ângulos
3.5 Polígonos
3.6.1 Cônicas
3.6.2 Hipérbole
3.6.3 Parábola
3.6.4 Elipse
3.6.5 A Circunferência
Licenciatura em Ciências · USP/ Univesp
aplicações à geometria plana
3
Licenciatura em Ciências · USP/Univesp
35
3.1 Introdução
Geometria é um ramo da matemática que estuda as propriedades do espaço e as
figuras que ele comporta. No caso das figuras, procuramos analisar suas formas,
tamanhos, posições relativas, bem como deduzimos resultados (Teoremas ou
Proposições) que podem ser obtidos a partir de alguns postulados. As figuras
contidas num plano são alvo de estudo da geometria dita plana. As figuras
tridimensionais são estudadas na geometria espacial.
A geometria teve início cerca de 3.000 anos antes de Cristo no Egito. A necessidade de
medir com precisão as terras constantemente demarcadas após as sucessivas inundações do Nilo,
ou o uso dessas demarcações para efeito de pagamento de impostos, constituiu-se no pano de
fundo desse desenvolvimento inicial da geometria. A palavra geometria advém desses primeiros
esforços de “medidas da terra”. Os babilônicos introduziram aperfeiçoamentos nessa área do
conhecimento, a qual foi consolidada pelos gregos. O marco dessa consolidação foi a coletânea
de livros Os Elementos, escritos por Euclides.
A geometria experimentou grandes revoluções ao longo da História. A primeira delas deve
ser creditada a René Descartes, que introduziu a Geometria Analítica. Bolyai, Lobatchesvky,
Gauss e Riemmann desenvolveram geometrias não Euclidianas. Einstein associou uma propriedade do espaço à matéria nele existente. A teoria das Cordas e a Teoria M propõem espaços
com mais de três dimensões.
Na geometria analítica, o conceito de função tem um papel central, com aplicações tanto
na geometria plana quanto na geometria espacial. Neste tópico, analisaremos aplicações do
conceito de função no estudo das retas, semirretas, segmentos de reta, bem como de algumas
figuras planas, especialmente polígonos, e, finalmente, as cônicas.
Na geometria analítica, o espaço é pensado como um conjunto (infinito) de pontos. Assim,
ao introduzir a ideia de pontos no espaço, somos levados a pensar como caracterizar cada ponto
desse espaço. Com isso, procuramos dar uma definição mais operacional para esse conceito.
Isso pode ser feito uma vez introduzido um referencial. Adotado um determinado sistema
de referência, cada ponto do espaço pode ser especificado a partir das suas coordenadas. Um
ponto pode ser especificado por meio das coordenadas cartesianas (x, y, z). Temos assim, uma
correspondência biunívoca entre um ponto do espaço e suas coordenadas.
aplicações à geometria plana
3
36
Licenciatura em Ciências · USP/Univesp
3.2 Relações e Funções
Consideremos uma relação entre as coordenadas (x,y) no plano, que pode ser escrita genericamente como:
F ( x, y ) = 0
3.1
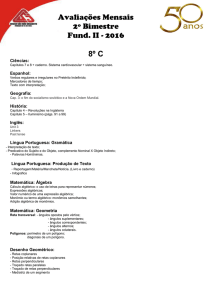
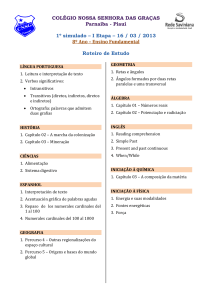
Uma curva no plano pode ser escrita como uma relação da forma acima. Por exemplo, a
circunferência é definida como a curva para a qual vale a seguinte relação:
x2 + y 2 =
R2
3.2
Onde R é o raio da circunferência.
Na relação acima temos duas funções implícitas nela. A primeira delas é a função:
y+ ( x) =
+ R2 − x2
3.3
que descreve apenas um segmento da circunferência. A segunda é a função:
y− ( x) =
− R2 − x2
Figura 3.1: Segmentos da circunferência descrito por funções. / Fonte: Cepa.
3.4
Assim, nem toda relação é uma
função. No entanto, relações como a
acima definem funções implícitas.
3.3.1 Retas e Segmentos de retas no Plano
No plano, estabelecemos uma correspondência biunívoca entre os pontos do plano e o par
de coordenadas (x, y) a ele associado:
P ⇔ ( x, y )
TERRA E UNIVERSO Fundamentos da Matemática I
3.5
Licenciatura em Ciências · USP/Univesp
37
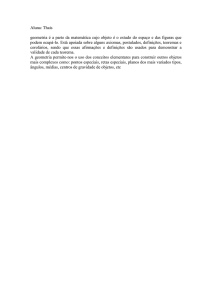
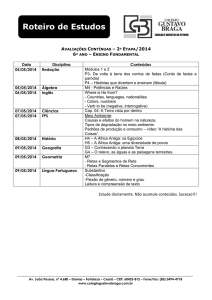
Considerando-se uma reta contida no plano x – y (o plano caracterizado pela equação
z = 0), sua expressão mais geral é:
=
y ax + b
3.6
ou seja, a equação que relaciona
as coordenadas x e y dos pontos
que pertencem à reta é uma equação do primeiro grau. Muitas
vezes, especialmente quando y e
x se referem a grandezas físicas,
referimo-nos às constantes a e b
Figura 3.2: Gráficos da função afim e
como parâmetros.
a determinação dos parâmetros a e b.
/ Fonte: Cepa.
Um gráfico típico da função
afim, aquela sob a forma da expressão 3.6, é apresentado na
figura 3.2.
O parâmetro b pode ser facilmente identificado com o valor da coordenada y quando x = 0,
ou seja, ele corresponde ao valor da função para esse valor de x:
y ( 0) = b
3.7
O parâmetro a é denominado coeficiente angular da reta. Para determiná-lo, basta considerar dois pontos P1 e P2, que pertencem à reta e cujas coordenadas são:
P1 ⇔ ( x1 , y1 )
3.8
P2 ⇔ ( x2 , y2 )
Da expressão 3.6 segue-se que, uma vez que eles pertençam à reta, temos:
=
y1 ax1 + b
=
y2 ax2 + b
3.9
aplicações à geometria plana
3
38
Licenciatura em Ciências · USP/Univesp
Subtraindo-se a primeira da segunda, encontramos:
=
a
y2 − y1 ∆y
=
x2 − x1 ∆x
3.10
Uma reta não perpendicular ao eixo x é inteiramente caracterizada pelo seu coeficiente
angular (a) e pelo ponto (0, b) no qual a reta intercepta o eixo y.
A partir de um ponto A localizado sobre uma reta, (x, y)+, podemos determinar duas semirretas. Cada uma delas é caracterizada como o lugar geométrico dos pontos do espaço que
satisfazem a expressão 3.6, bem como a uma das duas condições:
x ≥ xA
x ≤ xA
3.11
Dois pontos A e B sobre uma reta, de coordenadas (xA, yA) e (xB, yB),
determinam um segmento de reta. Este, por outro lado, é definido como
o lugar geométrico dos pontos do espaço que satisfazem à condição:
x A ≤ x ≤ xB
Figura 3.3: Segmento de reta. /
Fonte: Cepa.
3.12
3.3.2 Posição relativa de duas retas
Figura 3.4: Retas reversas. / Fonte: Cepa.
Pode-se falar de 3 posições relativas de duas retas.
Diz-se que duas retas são reversas quando elas não estão
contidas na mesma superfície plana. ou seja, não há uma superfície plana que contenha as duas retas. Nesse caso, as retas
não se encontram.
Consideremos agora as duas situações possíveis quando
duas retas pertencem ao mesmo plano.
Duas retas são ditas paralelas se elas tiverem o mesmo
coeficiente angular. Diferem, portanto, apenas no que diz
respeito ao parâmetro b.
Figura 3.5: Retas paralelas. / Fonte: Cepa.
TERRA E UNIVERSO Fundamentos da Matemática I
Licenciatura em Ciências · USP/Univesp
39
Quando duas retas r e s não são paralelas, elas se interceptam
em algum ponto P no plano. Nesse caso, dizemos que as retas
são concorrentes.
O ponto no qual duas retas, satisfazendo às equações
Figura 3.6: Retas concorrentes. / Fonte: Cepa.
=
y1 a1 x + b1
3.13
=
y2 a2 x + b2
se interceptam, tem coordenadas (xP ,yP) dadas pelas expressões:
y1 = y2 = yP
yP = a2 x p + b2
a1 xP + b1 = a2 xP + b2
⇒
⇒ xP =
b −b
yP = a2 2 1 + b2
a1 − a2
⇒
b2 − b1
a1 − a2
3.14
Por exemplo, o ponto de encontro das retas
y=
5x − 4
1
y=
3x + 2
2
3.15
tem coordenadas (3, 11).
3.4.1 Ângulos e Medidas de Ângulos
Considere o caso de duas retas concorrentes. As semirretas r’ e s’, que se originam no ponto
de intersecção, têm orientações que diferem entre si pela inclinação entre elas. Para medir a
inclinação definimos a grandeza ângulo. Ângulos podem ser medidos, uma vez que podem ser
comparados. O ângulo especifica quão inclinadas as duas retas estão uma em relação à outra.
Para entender o conceito de ângulo, consideremos circunferências concêntricas desenhadas
a partir do ponto P. Consideremos agora a relação entre o comprimento do arco e o raio da
circunferência. Dadas duas retas congruentes quaisquer, essa relação não depende do raio da
circunferência. É uma característica das direções relativas entre elas a sua inclinação.
aplicações à geometria plana
3
40
Licenciatura em Ciências · USP/Univesp
Podemos fazer uso de duas unidades de medida de ângulos.
É muito comum, no estudo do movimento circular, o uso de variáveis angulares. Assim,
é importante entender como medimos ângulos. Na medida de um ângulo podemos utilizar
qualquer uma das duas unidades: graus e radianos.
No caso do grau, dividimos a circunferência completa em 360 subdivisões. Um grau corresponde a uma dessas 360 subdivisões.
Figura 3.7: Com o transferidor medimos ângulos
em graus. / Fonte: Cepa.
Figura 3.8: Definição de grau como unidade de medida de ângulos. / Fonte: Cepa.
Sugerimos aqui que se dê uma boa olhada no transferidor. A medida de um ângulo em graus
é efetuada determinando-se quantas vezes o ângulo é maior do que um grau.
Para a medida do ângulo em radianos, determinamos o comprimento do
arco(s) associado a ele e o dividimos
pelo valor do raio. Temos, portanto:
Figura 3.9: Definição de radiano como unidade de medida de ângulos. /
Fonte: Cepa.
ϕ=
s
R
3.16
A circunferência toda corresponde a 2π radianos. Portanto, ao valor de 360° correspondem
2π radianos.
Pode-se escrever o coeficiente angular de uma reta, em termos do ângulo θ que ela forma
com o eixo x, como:
a=
TERRA E UNIVERSO Fundamentos da Matemática I
y2 − y1
= tgθ
x2 − x1
3.17
Licenciatura em Ciências · USP/Univesp
41
3.4.2 Mais Sobre Ângulos
Levando-se em conta a possibilidade de três retas
serem congruentes num ponto comum a todas, os ângulos formados quando levamos em conta uma delas
são ângulos adjacentes.
Duas retas concorrentes definem quatro ângulos.
Os pares de ângulos não adjacentes são denominados
opostos pelo vértice.
O ângulo entre duas retas de coeficientes angulares definidos pelos ângulos θ1 e θ2 é dado pela
diferença desses coeficientes:
θ = θ1 − θ2
3.18
Os ângulos opostos pelo vértice são iguais.
Dois ângulos são complementares se a soma de
seus valores for igual a 90°.
Ângulo reto é aquele cujo valor da medida resulta ser igual a 90°. Ângulo raso é aquele para o
qual sua medida resulta ser 180°.
Ângulos agudos são aqueles cujos valores são
menores do que 90°. Ângulos obtusos são aqueles
que excedem, em valor, 90°.
Dizemos que duas retas concorrentes são perpendiculares se o valor de qualquer um dos quatro
ângulos por elas formados for um ângulo reto.
Retas perpendiculares obedecem à seguinte relação entre seus coeficientes angulares:
a1 = −
1
a2
3.19
Figura 3.10: Ângulos adjacentes, opostos pelo
vértice e complementares. / Fonte: Cepa.
Figura 3.11: Retas Perpendiculares. / Fonte: Cepa.
Figura 3.12: Retas perpendiculares
entre si. / Fonte: Cepa.
desde que existam 1 e 2.
aplicações à geometria plana
3
42
Licenciatura em Ciências · USP/Univesp
Por exemplo, as retas
y=
5x − 4
1
1
− x+3
y2 =
5
3.20
são ortogonais entre si.
3.5 Polígonos
Outra classe relevante de figuras planas são aquelas que podem ser geradas a partir de um
conjunto de pontos A1, A2, ......An pertencentes ao plano. Analisaremos o caso em que nenhum
conjunto de três deles, contíguos, não pertencentes à mesma reta, esteja alinhado.
Cada um desses pontos tem coordenadas dadas por:
A1 ( y1 , x1 ); A2 ( y2 , x2 ); ⋅⋅⋅; Ai ( yi , xi ) ⋅⋅⋅ An ( yn , xn )
3.21
A distância d(A1, A2) entre dois pontos A1, A2 no plano é dada pela expressão:
d ( A1 , A2 )=
( y1 − y2 )
2
+ ( x1 − x2 )
2
3.22
Faremos, em seguida, com que cada um desses pontos seja unido por meio de segmentos
de linha ou por meio de arcos. Isso será feito em sucessão, terminando finalmente pelo primeiro (aquele pelo qual começamos).
Unimos o ponto A1 até o ponto A2,
depois ao ponto A3 e assim sucessivamente, até voltarmos ao ponto A1.
Algumas das figuras geradas por
Figura 3.13: Polígonos Irregulares. / Fonte: Cepa.
meio do procedimento acima têm um
grande apelo estético.
TERRA E UNIVERSO Fundamentos da Matemática I
Licenciatura em Ciências · USP/Univesp
43
Neste tópico, analisaremos as curvas resultantes do processo acima descrito quando utilizamos segmentos de reta para interligar os pontos em sucessão. A curva resultante tem o
nome de polígono.
Os pontos A1, A2, ......An são denominados vértices do polígono. Os segmentos entre
cada par de pontos são denominados lados do polígono.
Podemos classificar os polígonos em côncavos e convexos. Estes últimos são mais interessantes, pois eles incluem os polígonos regulares não estrelados.
Para entendermos a diferença entre as duas categorias, basta tracejar uma linha reta que coincida
com algum dos lados. Podemos agora antever duas situações. Ou as linhas retas aludidas acima cortam
o polígono para algum segmento considerado ou não cortam o polígono, independentemente do lado
considerado. Neste último caso, dizemos que o polígono é convexo. De outra forma, ele é dito côncavo.
Nomeamos os polígonos de acordo com o seu número de lados. Triângulos são polígonos com três lados. São denominados quadriláteros aqueles com quatro lados. Dando continuidade à nomenclatura, utilizamos sempre os prefixos gregos para designá-los. Eles são
chamados pentágonos (aqueles com 5 lados), hexágonos (contendo 6 lados), heptágonos
(7), octógonos (8), eneágonos (9), decágonos (10), e assim por diante.
São chamados polígonos regulares
aqueles que têm todos os lados congruentes (de mesmo comprimento),
bem como são congruentes todos os
ângulos. O fato notável em relação
aos polígonos regulares é poderem
todos eles ser construídos com os
instrumentos euclidianos: a régua e o
compasso. Para construí-los devemos
saber como dividir uma circunferên- Figura 3.14: Polígonos regulares. / Fonte: Cepa.
cia em partes iguais.
Figuras triláteras são aquelas que têm três lados; e triângulo equilátero é o que tem os 3
lados iguais; triângulo isósceles é aquele que tem 2 lados iguais, enquanto definimos o triângulo
aplicações à geometria plana
3
44
Licenciatura em Ciências · USP/Univesp
escaleno como aquele que tem 3 lados desiguais; um triângulo é dito retângulo quando ele
tem um ângulo reto e o triângulo é obtusângulo quando tem um ângulo obtuso; um triângulo
acutângulo é aquele que tem o 3 ângulos agudos.
Entre as figuras que têm 4 lados - os quadriláteros, o quadrado é aquele que tem os 4 lados iguais.
O perímetro de um polígono é dado pela soma das distâncias entre seus vértices. Escrevemos:
=
P d ( A1 , A2 ) + d ( A2 , A3 ) + ⋅⋅⋅⋅⋅⋅⋅⋅ d ( An −1 , An ) + d ( An , A1 )
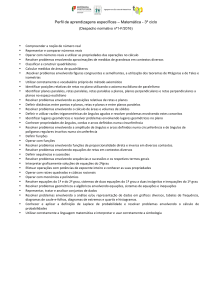
A área S de um polígono pode ser expressa
em função das coordenadas dos pontos A1, A2,
......An. Assim, no caso de
um triângulo, podemos
escrever sua área em
função das coordenadas
dos vértices como:
S=
A
3.23
B
Figura 3.15: A área de um triângulo, um polígono de três lados, pode ser calculada por
meio das coordenadas de seus vértices. No exemplo “A” um triângulo–retângulo e, em “B”,
um triângulo qualquer. / Fonte: Cepa.
1
( y1 + y2 )( x1 − x2 ) + ( y2 + y3 )( x2 − x3 ) + ( y3 + y1 )( x3 − x1 )
2
3.24
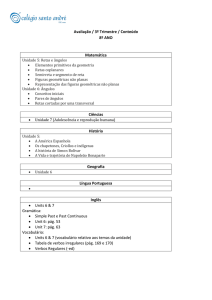
3.6.1 Cônicas
As cônicas são curvas que podem ser descritas por meio de
funções. É importante salientar, no entanto, que isso só é possível
quando expressamos a distância do ponto no espaço em função do
ângulo formado pela reta que interliga esse ponto e a origem das coordenadas. Essas coordenadas são denominadas coordenadas polares.
Seja r a coordenada distância do ponto até a origem e θ, o
ângulo já mencionado. Em termos dessas coordenadas, uma cônica
TERRA E UNIVERSO Fundamentos da Matemática I
Figura 3.16: Distância e ângulo
associado a um ponto do espaço
(coordenadas polares). / Fonte: Cepa.
Licenciatura em Ciências · USP/Univesp
45
é uma função que expressa a dependência da distância do ponto com o ângulo. A forma mais
geral de uma cônica é:
r (θ ) =
RC
(1 + ε cosθ )
3.25
Onde Rc e ε são constantes. Desta última constante, denominada parâmetro de excentricidade, ε, depende a forma da cônica. O parâmetro Rc será definido como o comprimento
característico da cônica.
Finalmente, queremos ressaltar que as cônicas podem ser escritas em coordenadas polares por meio do
uso da excentricidade e de outro parâmetro com dimensão de comprimento. Este parâmetro é introduzido quando tais curvas são definidas a partir de distâncias a pontos ou retas. O parâmetro definido a partir
das distâncias de pontos sobre a curva até pontos fixos ou retas (como o semieixo maior da elipse) será
doravante designado por a. Essas definições introduzem uma distância característica da curva. Como é de
se esperar, existe uma relação entre o parâmetro Rc da expressão e a distância caraterística já mencionada.
A relação entre os dois parâmetros pode ser utilizada como uma forma de definir a excentricidade das diversas cônicas. Assim, podemos introduzir relações entre eles de duas formas distintas.
A primeira forma é válida tanto para a elipse quanto para a hipérbole. Escrevemos nesse caso:
RC = ± a (1 − ε 2 )
3.26
onde o sinal + se aplica à elipse
enquanto o sinal menos se aplica
à hipérbole. Para a circunferência e para a parábola escrevemos
Rc = a
3.27
A seguir apresentaremos, de
forma sucinta, as diversas cônicas.
Figura 3.17: As quatro cônicas. / Fonte: Cepa.
aplicações à geometria plana
3
46
Licenciatura em Ciências · USP/Univesp
3.6.2 Hipérbole
Essa curva é caracterizada ou definida a partir dessa propriedade pelo fato de
que as distâncias r e r' de um ponto sobre a curva até dois pontos localizados no
plano, denominados focos, são tais a satisfazerem:
r − r′ =
±2a
3.28
onde, na expressão acima, 2a é a distância entre os focos. O sinal + ou – se aplica
a cada um dos ramos da hipérbole. Lembramos que a hipérbole é uma curva que
contém dois ramos, cada um deles tendo um foco distinto (Figura 3.18).
A partir da expressão 3.26 podemos constatar que, para valores do parâmetro excentricidade superiores a 1, a cônica é uma hipérbole. As assíntotas da hipérbole são as linhas cujas
inclinações são dadas pela expressão:
A
B
cos α = ±ε −1
3.29
ε >1
3.30
com
Figura 3.18: “A”: quando ε > 1, temos
a hipérbole. “B”: quando ε = 1 temos
a parábola. / Fonte: Cepa.
Levando-se em conta a relação entre a metade da distância entre os focos, uma distância
característica da hipérbole, e o comprimento também característico dela, dada pela expressão 3.26, escrevemos essa curva em coordenadas polares como:
r (θ ) =
− a (1 − ε 2 )
(±1 + ε cosθ )
3.31
onde os sinais ± estão associados aos diferentes ramos da hipérbole. A seguir, consideraremos, como já o fizemos antes, apenas o ramo associado ao sinal positivo.
TERRA E UNIVERSO Fundamentos da Matemática I
Licenciatura em Ciências · USP/Univesp
47
3.6.3 Parábola
A parábola é uma cônica para a qual a excentricidade assume o valor ε = 1.
Assim, podemos descrevê-la, utilizando coordenadas polares por meio do uso de
apenas um parâmetro, o comprimento característico dado pela expressão 3.27.
Escrevemos tal curva, em função desse parâmetro, como:
r=
a
1 + cos θ
3.32
A parábola é o lugar geométrico dos pontos do plano que se situam a distâncias iguais de um
ponto (denominado foco) e de uma reta conhecida como diretriz. O parâmetro a, a distância
característica da parábola, é a distância do foco à diretriz (Figura 3.19).
Figura 3.19: Qualquer ponto na hipérbole está mais próximo de um foco do que de outro.
Qualquer ponto na parábola está à mesma distância do foco e da diretriz. / Fonte: Cepa.
aplicações à geometria plana
3
48
Licenciatura em Ciências · USP/Univesp
3.6.4 Elipse
A elipse é definida como o lugar geométrico dos pontos do plano que distam
de dois pontos, conhecidos como focos, por um valor fixo que denotamos por
2a. Ou seja, sendo r e r’ tais distâncias, escrevemos para os pontos localizados
sobre a elipse:
r + r′ =
2a
3.33
Em analogia com o caso da hipérbole (Expressão 3.28), definimos o parâmetro a como a
metade da distância mantida constante ao longo da elipse. É fácil perceber que a distância a é
igual ao semieixo maior da elipse.
A elipse se distingue das cônicas anteriores pelo fato de que sua excentricidade é negativa (ε < 1). De acordo com o que foi discutido na introdução, podemos escrever a seguinte
equação para a elipse:
r (θ ) =
a (1 − ε 2 )
(1 + ε cosθ )
3.34
Quando escrevemos a equação da elipse em coordenadas polares, fazemos uso do semieixo
maior da elipse bem como do semieixo menor. Claramente podemos relacioná-lo aos dois
parâmetros utilizados quando a escrevemos em coordenadas polares. A relação entre o semieixo
menor e os dois parâmetros já mencionados é obtida a partir de uma relação simples envolvendo triângulos retângulos. Da figura 3.20a, inferimos que:
=
b a 1 − ε2
3.35
Utilizando a expressão 3.34 concluímos que os pontos de aproximação máxima e mínima
da origem, denominados, respectivamente, afélio e periélio, ocorrem para valores dos ângulos
para os quais cosθ = ±1. Assim, os valores r+ (distâncias máximas) e r− (distâncias mínimas) são
dados por:
=
r± a (1 ± ε )
TERRA E UNIVERSO Fundamentos da Matemática I
3.36
Licenciatura em Ciências · USP/Univesp
49
Lembramos, finalmente, que a área da elipse é dada pela expressão:
A = πab
A
B
C
D
3.37
Figura 3.20: “A”: semi-eixo maior; “B”: foco; “C”: afélio e periélio; “D”: área da elipse. / Fonte: Cepa.
3.6.5 A Circunferência
A circunferência é o lugar geométrico dos pontos do
plano equidistantes de um ponto denominado centro da
circunferência. Essa distância é identificada como o comprimento característico da circunferência. Da expressão 3.26
segue-se que a circunferência é uma cônica cuja excentricidade é nula (ε = 0). Escrevemos nessas circunstâncias:
r= a= RC
3.38
Figura 3.21: A circunferência é uma elipse
de excentricidade 0. Isto acontece quando os
dois focos estão sobrepostos, no centro da
circunferência. / Fonte: Cepa.
aplicações à geometria plana
3