APOSTILA DO LABORATÓRIO
DE FÍSICA I
Calouros - 2016*
Curso Superior de Tecnologia dos Materiais
Curso Superior de Tecnologia da Construção Civil
*Edição alternativa exclusiva para as aulas do prof. Renato Pugliese
Sumário
I. Introdução....................................................................................................3
II. Instruções sobre relatórios..........................................................................3
1ª Experiência: Medidas Físicas......................................................................7
2a Experiência: Movimento Retilíneo Uniformemente Variado (MRUV)...12
3ª Experiência: Mesa de Força......................................................................16
4ª Experiência: Molas....................................................................................20
5ª Experiência: Equilíbrio Estático do Corpo Rígido - Escada.....................24
6ª Experiência: Colisão Bidimensional.........................................................29
Corpo Docente (Física)
Cezar Soares Martins (Coordenador do Laboratório de Física)
Douglas Casagrande
Eduardo Acedo Barbosa
Edson Moriyoshi Ozono
Eraldo Cordeiro Barros Filho
João Carlos Botelho Carrero
João Mongelli Netto
Luciana Kazumi Hanamoto
Luciana Reyes Pires Kassab (Diretora)
Norberto Helil Pasqua
Osvaldo Dias Venezuela
Regina Maria Ricotta
Renato Marcon Pugliese (Responsável pela disciplina de Física)
Roberto Verzini
Valdemar Bellintani Jr.
Auxiliar Docente
Domenico Paulo Bruno Cainelli
2
I. Introdução
Esta apostila contém os roteiros das experiências que serão desenvolvidas no decorrer do
semestre. Cada roteiro é formado por uma parte introdutória, que aborda de maneira sucinta as leis
físicas e os conceitos que serão usados no experimento, procedimento experimental e folhas de
respostas.
Os cálculos e resultados obtidos referentes às experiências restantes, serão elaborados em
grupo e apresentados na forma de relatórios. Recomenda-se que o aluno leia cada roteiro antes das
aulas de laboratório e que não se esqueça de trazer a apostila, sem a qual não conseguirá realizar a
experiência.
No final do semestre, haverá uma prova sobre os experimentos realizados durante as aulas de
laboratório (para turmas exclusivas de laboratório).
II. Instruções sobre relatórios
1. Quando devo fazer um relatório de experimento?
Após a realização de cada experimento, fora do horário de aula. Para algumas turmas haverá
uma quantidade de aulas destinada para confecção de parte dos relatórios, mas para a
maioria das turmas o relatório deve ser confeccionado fora do período de aulas.
2. Quem deve fazer o relatório?
Cada relatório deverá ser feito exatamente pelo grupo (bancada) que participou do
experimento. Os relatórios não são individuais, são coletivos, feitos por cada grupo.
3. Qual o prazo para construção do relatório e quando entregar?
Os relatórios devem ser entregues na data do experimento seguinte, com exceção do último
relatório que terá uma data específica. Em geral os grupos terão um prazo de 2 semanas para
entregar os relatórios prontos, com exceção de quando houver algum feriado ou algum evento
e, nestes casos, os prazos poderão ser estendidos por mais uma semana.
3
4. Para quem eu devo entregar o relatório pronto?
Para o seu professor, exclusivamente.
5. Quais itens o relatório deve conter?
5.1 Relatórios SIMPLES (R1, R2 e R3)
Os três primeiros relatórios devem ser feitos de modo simples, ou seja, apenas com os itens
abaixo mencionados:
I. Capa
Título do experimento, nomes dos integrantes, nome do curso, local e data de realização do
experimento;
II. Memorial de cálculos
Resumo de todos os cálculos feitos para se chegar aos resultados apresentados
posteriormente. Cálculos de médias, equações utilizadas, incertezas, desvios-padrão, áreas,
volumes, etc.
III. Resultados
Dados coletados, resultados, incertezas e desvios. Apresentar os resultados sempre seguidos
de suas incertezas, respeitando os algarismos significativos e a estética como nos modelos
da Apostila do Laboratório Didático de Física da FATEC-SP.
IV. Conclusão
Breve interpretação dos resultados
5.2 Relatórios COMPLETOS (R4, R5 e RP)
Os últimos três relatórios devem ser feitos de modo completo, ou seja, com todos os itens
abaixo mencionados:
I. Capa
Título do experimento, nomes dos integrantes, nome do curso, local e data de realização do
experimento;
II. Introdução
Motivações, objetivos, para que e por que fizeram o experimento;
III. Resumo teórico
Quais teorias, quais leis físicas, o que está por trás deste experimento;
IV. Metodologia
4
Passo a passo de quais materiais foram utilizados e como foi realizado o experimento;
V. Memorial de cálculos
Resumo de todos os cálculos feitos para se chegar aos resultados apresentados
posteriormente. Cálculos de médias, equações utilizadas, incertezas, desvios-padrão, áreas,
volumes, etc.
VI. Resultados
Dados coletados, resultados, incertezas e desvios. Apresentar os resultados sempre seguidos
de suas incertezas, respeitando os algarismos significativos e a estética como nos modelos
da Apostila do Laboratório Didático de Física da FATEC-SP.
VII. Considerações finais
O que o grupo aprendeu com o experimento, quais os erros e problemas enfrentados durante
a realização do experimento e da confecção do relatório, o que foi bem aproveitado e o que
poderia ser modificado, quais sugestões, etc.
VIII. Referências bibliográficas
Citar todo material (apostilas, livros, sites...) que foi consultado para confecção do relatório.
6. Como eu devo fazer o relatório?
Todos os relatórios devem ser construídos em seu corpo seguindo os seguintes pontos:
Texto: Times New Roman ou Arial, 12 pt., espaçamento de 1,5 e alinhamento justificado
para texto e equações, e centralizado para figuras e tabelas;
Digitação ou escrita: O relatório deve ser obrigatoriamente digitado, com exceção do
memorial de cálculos, equações e análise de dados (toda a parte matemática), que podem ser
feitos à mão.
Página: Margens de 2 cm, numeração em todas as páginas exceto capa.
Finalização: Grampo ou clipe (não encaderne, não coloque em pasta, em espirais ou capas
duras).
7. Como calcular os desvios, a propagação de erros e incertezas?
Como regra geral, devem seguir a seguinte condição, explicada com detalhes na APOSTILA
DO LABORATÓRIO DE FÍSICA I:
Medição única: apresentar VALOR MEDIDO e a INCERTEZA DO INSTRUMENTO.
Várias medidas: apresentar VALOR MÉDIO e o DESVIO PADRÃO AMOSTRAL.
Séries de várias medidas: apresentar VALOR MÉDIO e o DESVIO PADRÃO DA MÉDIA.
5
Algoritmos e equações: apresentar VALOR CALCULADO e o ERRO PROPAGADO.
8. Quais os critérios de correção e nota?
Nota 10,0 para os relatórios corretos, bem apresentados, organizados, com medidas,
equações e desvios bem calculados, além de uma conclusão interpretativa e honesta. A cada
duas repetições dos erros abaixo serão descontados os seguintes pontos:
Apresentação errada das medidas/valores: -0,5
Erro na incerteza do instrumento: -0,5
Erro na conversão de unidades: -0,5
Falta de unidade de medida: -0,5
Erro nos algarismos significativos: -0,5
Desvio não calculado: -1,0
Desvio calculado incorretamente: -0,5
Falta de organização/padronização: -1,0
Considerações finais incoerentes: -0,5
Falta de algum item obrigatório: -1,0
Erro de notação científica (escala): -0,5
Medida calculada errada: -1,0
Não percepção de dado absurdo: -0,5
9. Faltei em um experimento, o que faço?
Para todas as turmas haverá uma data específica para reposição de um experimento. Caso o
estudante perca mais de um experimento, poderá repor um deles e se tiver boas notas pode
até ser aprovado. Não há possibilidade de fazer o experimento e não entregar relatório ou
fazer o relatório sem ter feito o experimento.
6
1ª Experiência: Medidas Físicas
Objetivo
Familiarização com instrumentos de medida tais como régua, paquímetro e micrômetro. Uso
da Teoria de Erros para análise dos dados experimentais.
Introdução
A Física é uma ciência empírica. Tudo que sabemos a respeito do mundo físico e dos
princípios que governam o seu comportamento é proveniente de observações de fenômenos da
Natureza. A validade de qualquer teoria física está baseada na concordância com os resultados obtidos
experimentalmente.
Qualquer
número
ou
conjunto
de
números
usados
para
descrever
quantitativamente um fenômeno físico é chamado grandeza física.
O valor numérico de uma grandeza física é determinado experimentalmente por um conjunto
de medidas. Toda medida tem uma incerteza intrínseca que depende do aparelho utilizado, das
condições ambientais e do operador.
O valor de uma determinada grandeza física é, portanto, expresso através da quantidade que a
caracteriza acompanhada da incerteza ou margem de confiança a ele associada.
A Teoria de Erros é usada para analisar, calcular e expressar este valor.
7
Procedimento Experimental
1ª parte: Instrumentos de Medida e suas Incertezas.
Meça a altura e o diâmetro do cilindro apresentado na Figura 1. Para tanto use os seguintes
instrumentos: régua, paquímetros digital e analógico e micrômetros digital e analógico.
Para cada medida de altura e diâmetro efetuada com os diferentes equipamentos, calcule o
volume correspondente V
2
h . Use para o cálculo da incerteza do volume a Teoria de
4
Propagação de Erros. Coloque todos os resultados na Tabela 1.
h
Figura 1: Cilindro de altura h e diâmetro .
Tabela 1: Resultados das medidas do diâmetro e da altura de um cilindro, efetuadas com
diferentes equipamentos e cálculos dos volumes correspondentes.
Instrumento
régua
paquímetro analógico
micrômetro analógico
paquímetro digital
micrômetro digital
h h (
)
(
)
RESULTADOS
SÓ
V V(
SIGNIFICATIVOS
V V(
)
)
ALGARISMOS
8
Preencha a tabela 2 colocando a quantidade de algarismos significativos, duvidosos e corretos
encontrados para cada instrumento.
Tabela 2: Algarismos significativos, duvidosos e corretos das medidas feitas com diferentes
equipamentos.
instrumento
algarismos
algarismos
algarismos
significativos
duvidosos
corretos
régua
paquímetro analógico
micrômetro analógico
paquímetro digital
micrômetro digital
Mude as unidades dos volumes encontrados na Tabela 1 para o SI e complete a Tabela 3.
Tabela 3: Resultados dos cálculos do volume do cilindro, a partir de medidas realizadas com
diferentes equipamentos, no Sistema Internacional de Unidades.
V V(
Instrumento
régua
paquímetro analógico
micrômetro analógico
paquímetro digital
micrômetro digital
)
2ª parte: Medidas com Dispersões
Usando a balança analógica, meça a massa de um prisma triangular de madeira.
m=(
)g
Com um paquímetro analógico meça a base (b), a altura (h) e o comprimento (l) do prisma e
complete a Tabela 4. Faça 5 medidas da base, da altura e do comprimento. Como o prisma não
tem um formato regular, utilize pontos diferentes do mesmo para efetuar as medidas.
9
h
l
b
Figura 2: Prisma triangular de madeira de base (b), altura (h) e comprimento (l)
Calcule os desvios padrão da base, da altura e do comprimento.
Tabela 4: Medidas da base, da altura e do lado de um prisma triangular efetuadas com
paquímetro analógico.
b(
)
h(
)
l( )
1
2
3
4
5
Calcule o volume (V) e a densidade () do prisma usando as equações:
V
bh
l
2
(1)
m
v
(2)
Calcule as incertezas de V e usando a Teoria de Propagação dos Erros.
V=(
=(
±
) m3
) kg/m3
Sabendo que a densidade da madeira é = (0,65 0,03) g/cm3 (valor teórico), calcule o erro
percentual entre este valor e o seu resultado experimental.
10
E%
valor teórico valorexperimental
100
valor teórico
E% =
Questões
1. Ao efetuar as medidas do cilindro metálico (tabela 1), qual dos cinco instrumentos utilizados
proporcionou um resultado mais preciso? Por que?
2. Quando os resultados dos cálculos do volume do cilindro foram transformados para o SI (tabela 3),
a quantidade de algarismos significativos mudou?
3. Em que circunstancias deve-se utilizar a incerteza de um instrumento? Quando deve ser utilizado o
desvio padrão como incerteza da medida?
4. Quando é empregada a Teoria de Propagação dos Erros na determinação da incerteza do resultado
final?
Conclusão
11
2a Experiência: Movimento Retilíneo Uniformemente Variado (MRUV)
Objetivo
Caracterizar e utilizar os conhecimentos das equações horárias do MRUV para determinar a
aceleração do movimento de um volante que desce um plano inclinado.
Introdução
Nos movimentos retilíneos uniformes o vetor velocidade v tem sempre a mesma direção. Nos
movimentos retilíneos uniformemente variados é a aceleração que se mantém constante ao longo do
tempo. Tais movimentos podem ser acelerados ou retardados. Nos movimentos acelerados a
velocidade tem seu módulo aumentado ao longo do tempo e nos retardados, ao contrário, diminuído.
As equações da posição e da velocidade para os movimentos uniformemente variados são
dadas, respectivamente, por:
v v0 at
at 2
s s0 v 0 t
2
Isolando a variável tempo da equação da velocidade e substituindo o resultado na equação da
posição obtemos a equação de Torricelli:
v 2 v02 2a s s0
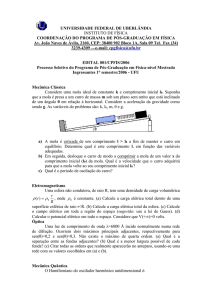
O gráfico da posição em função do tempo é dado por uma parábola, cuja concavidade pode
estar voltada para cima (a > 0) ou para baixo (a < 0) e o da velocidade em função do tempo é dado por
uma reta, representada na Figura 1. Nota-se que a área do gráfico v x t é numericamente igual ao
deslocamento ΔS.
12
v(m/s)
s
v0 = 0
t (s)
Figura 1: Gráfico da velocidade em função do tempo.
Calculando-se a área do gráfico acima, temos que s
por v
vt
. Sendo a velocidade média dada
2
s
, então:
t
vt
vt 1
v
(1)
2
v v v v 2v
t
2 t
2
Portanto, a velocidade (v) no instante (t) é igual à 2 vezes a velocidade média ( v ) medida para
um determinado espaço percorrido.
Parte Experimental
A figura abaixo apresenta o arranjo experimental que será utilizado. Verifique o nivelamento
da base do plano e em seguida incline os trilhos em aproximadamente 2º.
Escala em graus
Trilhos com escala
Fuso milimétrico
Volante
Sapata niveladora
amortecedora
Figura 2: Arranjo experimental para caracterizar o MRUA.
13
Com um cronômetro efetue 5 medidas do intervalo de tempo necessário para o volante
atingir diferentes posições no plano inclinado. Estas posições (x0, x1, x2, ..., x5) devem estar
separadas por intervalo de 7 cm.
Tabela 1: Posições marcadas na escala
x0 = (
x3 = (
±
±
) cm
) cm
x1 = (
x4 = (
±
±
) cm
) cm
x2 = (
x5 = (
±
±
) cm
) cm
Para tanto fixe 5 fitas adesivas nas posições x0,...,x5, conforme demonstrado na figura 3.
Prenda uma régua na posição x1. O volante deve ser colocado sempre na posição x0 no
momento do lançamento. Solte o volante, com a ajuda de uma outra régua e acione,
simultaneamente, o cronômetro para medir o intervalo de tempo t01. Repita este
procedimento para as outras posições restantes e preencha a Tabela 2.
Fita adesiva
60
50
40
30
20
10
Escala da rampa
Figura 3: Determinação das posições x0,..., x5, através de fitas adesivas fixadas na escala do plano inclinado
Serão obtidos assim os intervalos de tempo t01, t02, t03, ..., t05 relativos aos 5 intervalos de tempo
medidos.
Tabela 2: Medidas experimentais dos tempos
t01 ( )
t02 ( )
t03 ( )
t04 ( )
t05 ( )
1
2
3
4
5
Calcule as velocidades médias e as suas respectivas incertezas, relativas aos cinco intervalos
de tempo, através da equação v s .
t
14
Tabela 3: Velocidades médias do volante
v01 = (
v04 = (
±
±
) cm/s
) cm/s
v02 = (
v05 = (
±
±
) cm/s
) cm/s
v03 = (
±
) cm/s
Calcule as velocidades instantâneas v1, v2, v3, v4 e v5, através da equação 1.
Tabela 4: Velocidades instantâneas do volante
v1 = (
v4 = (
±
±
) cm/s
) cm/s
v2 = (
v5 = (
±
±
) cm/s
) cm/s
v3 = (
±
) cm/s
Faça um gráfico da velocidade instantânea em função do tempo usando papel milimetrado.
Determine graficamente o valor experimental do espaço Δs percorrido pelo volante,
lembrando-se que
s vt 2 .
Através do gráfico, determine a aceleração do volante.
Calcule o valor medido de Δs, dado por s x5 x 0 .
Compare o valor medido de Δs com o obtido através do gráfico v x t.
Questões
1. O que ocorreu com os valores das velocidades médias? Explique qual é o tipo de movimento
observado.
2. Faça um gráfico da posição em função do tempo usando papel milimetrado. Como é
denominada a forma da curva obtida no gráfico?
Conclusão
15
3ª Experiência: Mesa de Força
Objetivo
Determinar experimentalmente e teoricamente o equilíbrio de um ponto.
Introdução
Quando um objeto interage com o seu meio ambiente, pode ter sua velocidade modificada,
adquirindo uma aceleração. Isaac Newton estabeleceu as leis de movimento, introduzindo o conceito
de força a partir da aceleração que a mesma provoca a um dado objeto:
F ma
(1)
Podemos ter vários tipos de forças atuando sobre um mesmo objeto e às vezes se faz
necessário calcular a força resultante F das mesmas, através da soma vetorial. Existem vários
métodos de soma vetorial e os mais usados são os métodos do paralelogramo, da lei dos cossenos e da
decomposição retangular.
A força que devemos aplicar a um sistema para equilibrar a resultante F de um certo conjunto
de forças denomina-se equilibrante E . Tal força tem o mesmo módulo e a mesma direção da força
resultante (Figura 1). Entretanto os sentidos são opostos, isto é
FE0
E F
F
a
b
E
Figura 1: A força resultante F e sua equilibrante E
16
Procedimento Experimental
1ª parte: Determinação da equilibrante e da resultante de um sistema de forças.
Monte a mesa (Figura 2) com as forças F1 , F2 e F3 . Use a balança para determinar as
forças .
F1 = 290 gf 120º
F2 = 200 gf 210º
F3 = 400 gf 280º
DINAMÔMETRO
HASTE
ANEL
ROLDANA
MESA DE
FORÇA
Figura 2: Arranjo experimental usado para estudar o equilíbrio de um ponto.
Posicione o dinamômetro de modo que o sistema fique equilibrado. Neste momento o centro do
anel e do pino coincidirão.
Faça um diagrama das forças F1 , F2 e F3 , colocadas na mesa, e da resultante. Inclua neste
diagrama a força marcada pelo dinamômetro que corresponde a equilibrante experimental
E
Exp
do
sistema.
Anote o valor indicado pelo dinamômetro.
EExp
(
)
gf
17
Usando o método da decomposição vetorial, calcule a força resultante do sistema de forças
F
Teo
e preencha a Tabela 1. Calcule também a força equilibrante teórica E Teo .
Tabela 1: Dados para o cálculo da força resultante teórica e de sua equilibrante.
FORÇA (gf)
F1
F2
F3
FTeo
θ ( º)
ETeo
gf
gf
Compare os valores dos módulos da força equilibrante teórica e experimental através do
erro percentual.
E% =
2ª parte: Estudo
da variação da resultante em função do ângulo α formado entre
as forças G1 e G2 que compõem o sistema.
Monte o sistema da Figura 3 usando as forças abaixo indicadas e os ângulos apresentados
na Tabela 2.
G1
= 200 gf
G2
G1
= 200 gf
G2
Figura 3: Arranjo Experimental usado para estudar a variação da força resultante em função do ângulo α.
18
Para cada ângulo, posicione o dinamômetro de tal maneira que o sistema fique em equilíbrio e
anote o valor da equilibrante experimental E Exp indicada no dinamômetro. Calcule a força resultante
experimental e coloque os resultados na Tabela 2.
Para cada valor de
calcule a força resultante teórica F através da lei dos cossenos e
Teo
preencha a Tabela 2.
FTeo =
2
2
G1 G2 2 G1 G2 cos
Calcule o E % entre as resultantes teórica e experimental.
Tabela 2: Cálculos das Forças Teórica e Experimental para diferentes ângulos.
α
30º
45º
60º
90º
180º
FTeo (
)
FExp (
)
E%
Conclusão
19
4ª Experiência: Molas
Objetivo
Calibrar as molas usando a lei de Hooke.
Determinar a constante elástica equivalente de associações em série e paralelo.
Introdução
A deformação Δx sofrida por uma mola é diretamente proporcional a força que a provoca, ou
seja, F = k.Δx (1) (lei de Hooke), onde k é a constante elástica da mola.
A expressão acima é válida quando a deformação ocorre dentro do limite elástico do corpo.
Nesse regime, uma vez cessada a força, o corpo retorna à sua configuração inicial.
1) Associação de Molas em Paralelo
A Figura 1 mostra duas molas associadas em paralelo, com constantes elásticas dadas por k1 e
k2 e submetidas a uma força
F
. Nosso objetivo consiste em
determinar a constante elástica
equivalente deste arranjo.
Mola 1 Mola 2
Mola 1 Mola 2
x
F1
F2
F
Figura 1: Associação de molas em paralelo.
20
Sejam F1 e F2 as forças elásticas sobre as molas 1 e 2 respectivamente. Observando a Figura
1, vemos que a deformação sofrida por cada mola é a mesma e igual à deformação total do conjunto,
isto é :
x x1 x2 (2)
O módulo da força externa F , por sua vez, é dada por:
F F1 F2
(3)
Para o arranjo de molas em paralelo, considerando k a constante elástica equivalente, obtemos
F = k.Δx. Assim sendo, para cada mola, podemos escrever F1 = k1.Δx1 e F2 = k2.Δx2. Através destas
relações e das equações (2) e (3), resulta para a constante elástica equivalente da associação em
paralelo a expressão:
k k1 k 2
(4)
2) Associação de Molas em Série
Na associação em série da Figura 2, a força externa F que atua sobre o arranjo age sobre as
molas 1 e 2, de modo que:
F F1 F2
(5)
Mola 1
Mola 1
Mola 2
Mola 2
x
F = F1 = F2
Figura 2: Associação de molas em série
21
Pela Figura 2, vemos que a deformação total é a soma das deformações individuais, ou seja,
x x1 x2
(6)
Sendo Δx1 = F1 / k1 e Δx2 = F2 / k2 e considerando as equações (5) e (6), obtemos para a
constante elástica equivalente da associação em série:
k
k1 k2
k1 k2
(7)
3) Calibração da mola pelo processo dinâmico
Se uma massa m presa a uma mola de constante elástica k
for deslocada de sua posição de equilíbrio e, em seguida,
solta, ela passará a oscilar de maneira periódica em torno
desta posição (vide Figura lateral). Pode-se mostrar que o
Posição
inicial
período desta oscilação é dado por:
T 2
m
k
Deslocamento
(8)
Procedimento Experimental
1ª parte: Calibração da mola
Monte o arranjo da Figura 4, posicionando o porta massor
sob a mola.
Adicione no porta massor cilindros de metal com pesos
conhecidos.
Para cada peso, meça a deformação correspondente da mola.
Preencha a Tabela 1 e esboce o gráfico da força em função
da deformação.
Figura 4: Arranjo experimental usado para determinar
a constante elástica da mola.
22
Determine a constante elástica da mola através do cálculo do coeficiente angular da reta obtida no
gráfico.
Tabela 1: Calibração da mola.
P(
)
Δx (
±
±
±
±
±
±
±
±
±
±
±
±
)
2ª parte: Determinação da constante elástica equivalente de molas em série e em
paralelo
A determinação experimental das constantes elásticas equivalentes dos arranjos em série e em
paralelo é feita através do procedimento usado para a calibração da mola. Os resultados devem ser
colocados nas Tabelas 2 e 3. Use a mola calibrada na 1ª parte e uma outra com constante elástica
conhecida.
Calcule os valores experimentais das constantes elásticas das associações em série e em paralelo,
através do coeficiente angular das retas obtidas.
Calcule os valores teóricos das constantes elásticas das associações em série e em paralelo, usando
as equações (4) e (7).
Compare os valores experimental e teórico através do erro percentual.
Tabela 2: Associação em série
P(
)
Δx (
±
±
±
±
±
±
±
±
±
±
±
±
)
Tabela 3: Associação em paralelo.
P(
)
Δx (
)
±
±
±
±
±
±
±
±
±
±
±
±
Conclusão
23
5ª Experiência: Equilíbrio Estático do Corpo Rígido - Escada
Objetivo
Estudar as condições de equilíbrio de corpos rígidos, através da tração em uma mola que une
os dois lados de uma escada articulada.
b
Introdução
Nesta experiência estudaremos o equilíbrio de uma escada composta
de dois lados, com um rolete em um deles (que permite desprezar o atrito do
sistema), um pino e uma mola, submetida à ação das forças externas
apresentadas no esquema abaixo (Figura 2). A experiência tem como
finalidade determinar a tração na mola que une os dois lados da escada. A
carga
Q
é aplicada no último degrau do lado em que está o rolete e é o
ângulo formado entre os dois lados da escada no equilíbrio.
Q
Ray
Figura 2: Forças externas de uma escada em
equilíbrio. A carga Q é aplicada no último degrau do
lado que contém um rolete que permite desprezar o
a
atrito.
P1
Rax
Rcy
P2
Rcx c
No equilíbrio do corpo em questão temos:
F
y
F
x
0
P1 P2 Q Ray Rcy
0 Rax Rcx 0 pois
(1)
Fat 0 devido à presença do rolete.
Estudamos, a seguir, o equilíbrio de cada um dos lados da escada separadamente ( L
comprimento da escada). Devemos agora levar em conta a tração na mola ( T ) e as forças de reação
24
no pino ( Rb ), isto é, as forças internas do sistema. Para o lado esquerdo da escada ( Figura 3 )
temos, para que
M
b
0 , a equação:
P1
L
sen Ty Ray L sen 0 ( 2 )
2
Rbx b
R
by
2
y
Ray
a
P1
T
Figura 3: Forças externas e internas do lado da escada que não possui rolete. O braço da força T é dado por y.
Usando o mesmo raciocínio para o lado direito do conjunto (de peso P2 ) da Figura 2, temos:
P2
L
sen Ty Qx Rcy L sen 0
2
(3)
Somando as equações ( 2 ) e ( 3 ), e usando a equação ( 1 ), chegamos à expressão que fornece
o módulo da tração na mola:
T
L P1 P2 sen 2Q L sen x
4y
(4)
25
A tração será encontrada pela equação acima, medindo-se os pesos das escadas ( P1 e P2 ), a
carga
braços
Q
e o valor do ângulo , pois
e y (Figura 4) pois:
x
y A cos
2
. Através deste ângulo
calculamos os valores dos
(onde A é a distância do centro do pino ao centro do degrau onde
está a mola)
x B sen (onde B é a distância de centro do pino ao centro do degrau onde está a carga Q)
x
Rby
Rbx
b
A
B
y
Q
P2
T
c
Rcy
Figura 4: Forças interna e externa do lado da escada que possui rolete e carga Q . Os braços da forças T e Q
são dados por
y e
x respectivamente.
A tração calculada pela equação (4) deve ser comparada com a calculada pela Lei de Hooke,
T kX .
Procedimento Experimental
A experiência será feita com o arranjo da Figura 2, unindo os lados da escada com uma
mola. Meça as intensidades de P1 , P2 e Q .
P1 = (
)
gf
Q= (
)
gf
P2 = (
)
gf
26
Use, para o comprimento da escada, a média aritmética dos comprimentos individuais. Para
tanto coloque os dois lados sobre a mesa, na posição vertical, e meça suas alturas a partir do
centro do pino.
L=(
)
mm
Meça o comprimento inicial da mola (considere em tal medida as alças que envolverão os
degraus da escada). Faça esta medida com a mola fora da escada, isto é, quando sujeita a
nenhuma deformação.
Xi = (
)
mm
Meça os comprimentos A e B apresentados na Figura 4.
A= (
)
mm
B=(
)
mm
Coloque o óleo na parte interna do rolete e gire-o com a mão várias vezes. Em seguida,
coloque óleo na parte externa do rolete, que deslizará sobre a mesa. Tal procedimento é
importante para minimizar o atrito.
Monte o arranjo da Figura 2 com a carga
Q
posicionada no último degrau, no lado em que
está o rolete, e meça a deformação da mola ( X ) quando a escada está em equilíbrio. A
medida do comprimento final da mola deve ser feita na parte externa da escada, isto é,
tomando-se a distância entre
as partes
externas dos cilindros que formam os 2
degraus onde a mola será apoiada (conforme
Figura 5). Meça também o ângulo e calcule
o ângulo
( ).
2
Q
MOLA
XF
ROLETE
Figura 5: Arranjo experimental para determinar a
tração na mola de uma escada em equilíbrio. A carga
Q está colocada no último degrau do lado onde há um
rolete e
X F representa o comprimento final da mola.
27
Faça 5 medidas do comprimento final da mola e do ângulo
e encontre as médias
aritméticas e seus respectivos desvios padrão.
XF = (
=(
) mm
)º
Através da média aritmética do ângulo, calcule os valores dos braços x e y . Calcule a
tração teórica pela equação 4.
x=(
)
y=(
mm
TTeo = (
)
)
mm
gf
Calcule a tração experimental através da lei de Hooke T EXP = k X, usando a constante
elástica da mola.
k=(
)
gf/mm
TExp
=(
)
gf
Compare a tração teórica e a experimental através do erro percentual.
E% =
Conclusão
28
6ª Experiência: Colisão Bidimensional
Objetivo
Determinar a velocidade de uma esfera que colide com uma outra, estacionária, utilizando as
Leis de Conservação de Energia e de Quantidade de Movimento.
Introdução
1) MOVIMENTO BALÍSTICO IDEAL (sem resistência do ar)
Considere um corpo sendo lançado obliquamente, com velocidade V0 (conforme Figura 01).
Desprezada a resistência do ar, o corpo fica sob a ação exclusiva de seu peso e sujeito apenas à
aceleração da gravidade g .
Y
V0
V
g
g
X
Figura 01: Lançamento oblíquo de um corpo no vácuo
O movimento descrito pelo corpo é resultado da composição de dois movimentos que agem
simultaneamente e são independentes: movimento uniformemente variado na direção vertical, cuja
aceleração é a da gravidade (|ay|=g) e movimento uniforme na direção horizontal, onde não há
aceleração (aX = 0).
Desta forma temos:
Movimento horizontal (M.U.):
V X V0 X cte.
X X 0 V0 X t
29
Movimento vertical (M.U.V.):
VY V0Y gt
1
Y Y0 V0Y t gt 2
2
Para um lançamento horizontal, originário de uma altura inicial y0 = h e com velocidade inicial
V0x = V0 (V0y = 0) ( Figura 02) as equações horárias do movimento se reduzem a:
X V0 t
Y h
1 2
gt
2
Considerando pelo gráfico Y 0 , temos que h = gt2; assim a velocidade V0 ficará em função de
X, g e h.
t
X
V0
1 X
h g
2 V0
V0
Y
Y0 = h
2
gX 2
2h
2
(1)
V0
V
X
Y=0
ALCANCE
Figura 02: Lançamento horizontal de um corpo no vácuo
2) PRINCÍPIO DA CONSERVAÇÃO DO MOMENTO LINEAR (QUANTIDADE DE
MOVIMENTO)
Considere um corpo de massa m e com velocidade V num determinado referencial. A
quantidade de momento linear deste corpo é dada por:
P mV (2)
30
Pelo Teorema do Impulso sabemos que:
I R P1 P2
A expressão acima indica que a variação do momento linear de cada partícula em uma colisão
é igual ao impulso que atua sobre ela.
Então, na ausência de forças externas:
FR 0 I R 0 P1 P2 0 P1 P2
A expressão acima representa o Princípio da Conservação do Momento Linear.
Desta forma em uma colisão uni ou bidimensional entre dois corpos, A e B, o momento linear
total antes da colisão é igual ao momento linear total após a colisão:
P
A
PB
ANTES
PA PB
PTOTAL ANTES PTOTAL APOS
APOS
(3)
Na figura 03 o corpo A colide obliquamente com o corpo B, inicialmente em repouso. Após a
colisão, as direções dos seus movimentos não são paralelas, o que caracteriza uma colisão
bidimensional:
V A1
Figura 03: Colisão bidimensional entre dois corpos A e B
PTANTES m AV
PB2
PA2
PT PA2 PB2 m AV A2 mBV B2
Substituindo a equação 1 na equação 2, obtemos o momento linear de cada um dos corpos A e
B, após a colisão (PA2 e PB2), ou seja:
31
P
g
mX
2h
(4)
Conhecendo-se o ângulo entre PA e PB 2 determinamos o momento linear total após a
2
colisão pela Lei dos Cossenos, isto é:
PT
2
PA2
2
PB2
2
2. PA2 . PB2 .cos
(5)
Usando a equação 3 e considerando que antes da colisão o corpo B está em repouso e portando
VB1 = 0 obtemos:
PTAPOS m AV EXP
(6)
Substituindo as equações 4 e 5 em 6 calculamos VEXP (velocidade do corpo A ao colidir com
B).
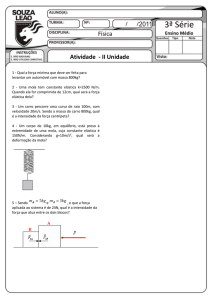
3) LEI DA CONSERVAÇÃO DE ENERGIA MECÂNICA (ENVOLVENDO ROTAÇÃO)
Considere uma esfera rolando a partir de uma altura H por um declive, sem deslizar (Figura
04). O seu centro de massa G fica animado com velocidade linear V e, simultaneamente, com
velocidade angular w. Desta forma, em cada instante da trajetória a velocidade é dada por V=wR, onde
R é o raio da esfera. Se houver escorregamento tais considerações não serão válidas.
Ponto 1
H
Ponto 2
Figura 04: Esfera que rotaciona e translada por um declive
Portanto, o corpo adquire uma energia cinética de rotação E CR = Igw2 e uma energia cinética de
1
translação E CT mV 2 , onde IG é o momento de inércia da esfera em relação ao eixo que passa
2
pelo seu centro de massa.
32
No ponto 1:
existe energia potencial: E P mgH (devido à altura)
não existe energia cinética: E C 0 (inicialmente não há movimento e V0 = 0)
No ponto 2:
não existe energia potencial H 0
1
1
existe energia cinética E C mV 2 I G w 2
2
2
Calcularemos a velocidade teórica (VTEO) com a qual o corpo atinge o ponto 2 desprezando
perdas de energia por calor e, portanto, aplicando a Lei de Conservação de Energia:
(Energia Mecânica)1 = (Energia Mecânica)2
mgH1
1
1
1
1
mV1 2 I G w1 2 mgH 2 mV2 2 I G w2 2
2
2
2
2
Como:
V1= 0; w1= 0; H1= H; H2 = 0; w2 = w; V2 = VTEO
mgH
1
1
2
mVTEO
I G w2
2
2
2
2
Sabendo-se que V TEO =wR e I G = mR , deduzimos, em função de g e h a equação que nos
5
permite calcular VTEO:
1
1 2
V
2
mgH mVTEO
R 2 m . TEO
R
2
2 5
1 2
1 2
gH VTEO
VTEO
2
5
10
2
VTEO
gH (7)
7
2
Procedimento experimental
Meça as massas das esferas A e B:
m A= (
±
)g
mB = (
±
)g
33
Posicione a rampa de lançamento em cima da mesa, mantendo-a fixa durante o experimento;
Meça o desnível H entre o topo da rampa e o seu final:
H=(
±
) cm
Fixe a folha de registro ao pé da rampa;
Mediante fio de prumo marcar o pé da vertical (ponto C) na folha de registro;
Meça a altura h do final da rampa até o ponto C:
h=(
±
) cm
Coloque uma das esferas em repouso numa pequena depressão existente no final da rampa;
No topo da rampa abandone a outra esfera (sem rotação inicial) para que se choque com aquela
em repouso;
Após a colisão, as esferas atingem a folha de registro nos pontos 3 e 4. Meça os alcances X A e
XB do ponto C até os pontos 3 e 4 e o ângulo entre eles;
Repita o procedimento cinco vezes.
MA
Ponto 1
MB
H
Ponto 2
h
4
XA
C
XB
Fio de prumo
(Altura h entre o ponto 2
e o ponto C)
3
Folha de registro
Figura 5: Arranjo Experimental
Tabela 1: Dados relativos ao alcances dos corpos A e B e o ângulo entre esses alcances
1
2
3
4
5
XA XA (cm)
XB XB (cm)
()
34
Calcule a VTEO usando a equação (7):
VTEO = (
±
) m/s
Calcule VEXP usando as equações (4) e (5) em (6):
VEXP = (
±
) m/s
Compare VTEO com VEXP através do erro percentual E%.
E% =
Conclusão
35