Bianca Borem Ferreira
CONTROLE DE CAOS APLICADO À DINÂMICA DOS RITMOS CARDÍACOS
Tese de Doutorado apresentada ao Programa de
Pós-graduação
em
Engenharia
Mecânica,
COPPE, da Universidade Federal do Rio de
Janeiro, como parte dos requisitos necessários à
obtenção do título de Doutor em Engenharia
Mecânica.
Orientador: Marcelo Amorim Savi
Rio de Janeiro
Setembro de 2012
CONTROLE DE CAOS APLICADO À DINÂMICA DOS RITMOS CARDÍACOS
Bianca Borem Ferreira
TESE SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO LUIZ
COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA (COPPE) DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE DOUTOR EM
CIÊNCIAS EM ENGENHARIA MECÂNICA.
Examinada por:
________________________________________________
Prof. Marcelo Amorim Savi, D.Sc.
________________________________________________
Prof. Paulo Batista Gonçalves, D.Sc.
________________________________________________
Prof. Jorge Audrin Morgado de Gois, Dr. – Ing.
________________________________________________
Prof. Aline Souza de Paula, D.Sc.
________________________________________________
Prof. Thiago Gamboa Ritto, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
SETEMBRO DE 2012
Ferreira, Bianca Borem
Controle de Caos Aplicado à Dinâmica dos Ritmos
Cardíacos / Bianca Borem Ferreira. – Rio de Janeiro:
UFRJ/COPPE, 2012.
XV, 78 p.: il.; 29,7 cm.
Orientador: Marcelo Amorim Savi
Tese (doutorado) – UFRJ/ COPPE/ Programa de
Engenharia Mecânica, 2012.
Referências Bibliográficas: p. 74-78.
1. Dinâmica Não linear. 2. Ritmos Cardíacos. 3.
Controle de Caos. I. Savi, Marcelo Amorim. II.
Universidade Federal do Rio de Janeiro, COPPE,
Programa de Engenharia Mecânica. III. Titulo.
Aos meus pais, Deloina e Dervan, e ao meu marido, Maurício.
iii
Agradecimentos
Agradeço primeiramente a Deus por ter me dado tranquilidade, sabedoria e
perseverança para conquistar mais esta etapa do meu desenvolvimento acadêmico e
profissional.
Aos meus familiares, em especial à minha mãe, meu pai, a minha irmã, à Fátima,
à Sônia e ao Brito, pelo carinho, apoio, confiança e incentivo que foram essenciais para
que eu chegasse até aqui.
Em especial, agradeço ao meu marido, Maurício, por estar sempre ao meu lado,
por sempre estar disposto a me escutar, pelo carinho, companheirismo, paciência,
compreensão... Enfim, por tudo e tantas coisas que se torna até difícil expressar!!!
Agradeço aos amigos do Laboratório de Vibrações e Acústica (LAVI) por esses
anos de convivência e apoio. Em especial, a todos os que integram ou já integraram a
família/grupo de Fenômenos Não-Lineares e Caóticos (FENÃO) pela paciência, apoio,
companheirismo, amizade, carinho, incentivo e por sempre podermos compartilhar
nossos conhecimentos, dificuldades, dúvidas e anseios. Todos marcaram muito e de
forma especial esses últimos 4 anos da minha vida!!!
Também agradeço a todos os amigos que fiz no LTTC, LMT, LMS, LabRob e
em outros laboratórios, que passaram, permaneceram ou já se foram da minha vida, pela
paciência, principalmente com o meu falatório, carinho e pelos almoços, cafés e
lanchinhos animados e renovadores.
Ao professor Marcelo Savi pela paciência, amizade, incentivo, conselhos
acadêmicos e profissionais e, principalmente, pela orientação em todos os passos do
trabalho e por sua confiança na minha capacidade de concluí-lo.
À professora Aline Souza de Paula pela amizade, carinho, paciência e pelo
auxílio fundamental e essencial em vários momentos do trabalho. Muito obrigada por
todas as vezes que me recebeu na UnB e em sua casa. Muito obrigada também pelo
tempo que sempre desprendeu para me ajudar!
À CAPES, ao CNPq e à FAPERJ pelo suporte financeiro.
iv
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos necessários
para a obtenção do grau de Doutor em Ciências (D.Sc.)
CONTROLE DE CAOS APLICADO À DINÂMICA DOS RITMOS CARDÍACOS
Bianca Borem Ferreira
Setembro/2012
Orientador: Marcelo Amorim Savi
Programa: Engenharia Mecânica
A dinâmica dos ritmos cardíacos vem sendo amplamente estudada pelo fato do
coração desempenhar um papel fundamental na fisiologia dos seres vivos e por
apresentar um comportamento rítmico complexo. Os ritmos cardíacos podem ser
periódicos ou caóticos, e cada tipo de comportamento pode estar relacionado com um
funcionamento fisiologicamente normal ou patológico. Métodos de controle de caos
podem ser empregados em sistemas dinâmicos propiciando uma reação rápida,
modificando suas respostas. Neste trabalho avalia-se a capacidade do método de
controle por realimentação com estados defasados estendidos (ETDF) para estabilizar
comportamentos cardíacos caóticos patológicos, mais especificamente, a fibrilação
ventricular. As análises são realizadas em dois sistemas: um oscilador que reproduz o
comportamento de um marca-passo natural cardíaco; e três osciladores conectados por
acoplamentos com defasagem no tempo que reproduz os sinais de eletrocardiograma
(ECG). Cada um dos osciladores é modelado a partir da equação de Van der Pol
modificada. Os resultados obtidos mostram que a técnica de controle ETDF é eficaz
tanto na estabilização das órbitas periódicas instáveis quanto na supressão do
comportamento caótico. Desta forma, a abordagem pode ser empregada para minimizar
os efeitos da fibrilação ventricular, gerando comportamentos menos críticos.
v
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Doctor of Science (D.Sc.)
CHAOS CONTROL APPLIED TO CARDIAC RHYTHM DYNAMICS
Bianca Borem Ferreira
September/2012
Advisor: Marcelo Amorim Savi
Department: Mechanical Engineering
The dynamics of cardiac rhythms has been widely studied since the heart plays a
vital and fundamental role in the physiology of living beings and also for presenting a
complex rhythmic behavior. The rhythms can be periodic or chaotic, and each type of
behavior may be related to normal or pathological physiologically functioning. Methods
of chaos control can be employed in dynamical systems establishing quick reactions,
modifying their responses. In this work we evaluate the ability of the extended timedelayed feedback control method (ETDF) to stabilize pathological chaotic behaviors of
the heart, specifically, the ventricular fibrillation. Two systems are analyzed: an
oscillator that reproduces the behavior of a natural cardiac pacemaker; and a three
coupled oscillators system connected with time delay that reproduces electrocardiogram
(ECG) signals. Each oscillator is based on a modified Van der Pol equation. Results
show that the ETDF control technique is effective for both stabilization of unstable
periodic orbits and for the suppression of chaotic behavior. Therefore, this approach can
be employed to minimize the effects of ventricular fibrillation, generating less critical
behaviors.
vi
SUMÁRIO
LISTA DE FIGURAS................................................................................................... IX
LISTA DE TABELAS ............................................................................................... XIV
LISTA DE SIGLAS ..................................................................................................... XV
1
INTRODUÇÃO .............................................................................................. 1
1.1
Controle de caos ................................................................................................ 7
1.1.1
Controle de caos aplicado aos ritmos cardíacos............................................. 10
1.2
Objetivo do trabalho ........................................................................................ 11
1.3
Organização do trabalho ..................................................................................12
2
MÉTODO DE CONTROLE DE CAOS .................................................... 14
2.1
Identificação de órbitas periódicas instáveis (OPIs)........................................14
2.2
Método de controle por realimentação com estados defasados estendidos
(ETDF) ............................................................................................................15
2.2.1
Expoente de Lyapunov de uma OPI .............................................................. 17
3
MODELAGEM MATEMÁTICA DO FUNCIONAMENTO CARDÍACO
........................................................................................................................ 20
3.1
Modelo matemático de um marca-passo natural cardíaco............................... 20
3.1.1
Simulações numéricas .................................................................................... 22
3.2
Modelo matemático do sistema cardíaco......................................................... 25
3.2.1
Reprodução dos sinais do ECG ...................................................................... 28
3.2.1.1
ECG normal ................................................................................................... 30
3.2.1.2
ECG com flutter ventricular ........................................................................... 33
3.2.1.3
ECG com fibrilação ventricular ..................................................................... 37
4
CONTROLE DE CAOS APLICADO A UM MARCA-PASSO
NATURAL CARDÍACO ............................................................................. 42
4.1
Simulações numéricas ..................................................................................... 42
vii
4.1.1
Representação do sistema proposto para o cálculo dos expoentes de
Lyapunov ....................................................................................................... 43
4.1.2
Controle de caos ............................................................................................. 44
4.1.3
Supressão de caos........................................................................................... 51
5
CONTROLE DE CAOS DO SISTEMA CARDÍACO ............................. 53
5.1
Controle de caos utilizando uma análise desacoplada .....................................53
5.2
Controle de caos utilizando uma análise acoplada ..........................................57
5.2.1
Supressão de caos........................................................................................... 67
6
CONCLUSÕES ............................................................................................ 71
6.1
Trabalhos futuros ............................................................................................. 72
7
REFERÊNCIAS BIBLIOGRÁFICAS ....................................................... 74
viii
LISTA DE FIGURAS
Figura 1.1: Esquema do coração (GOIS & SAVI, 2009). ................................................ 1
Figura 1.2: Esquema de um ciclo cardíaco. ...................................................................... 2
Figura
1.3:
ECG
de
um
adulto
normal
(library.med.utah.edu/kw/ecg/mml/ecg_normal.html). .................................................... 3
Figura 3.1: Esboço do espaço de fase do oscilador de Van der Pol modificado proposto
por Postnov et al. (1999). ............................................................................................... 21
Figura 3.2: Atividade normal de um marca-passo natural cardíaco em regime
permanente: (a) Resposta no tempo; (b) Espaço de fase. ............................................... 23
Figura 3.3: Bacia de atração com coexistência de um atrator periódico de período-1 (em
preto) e um atrator caótico (em rosa).............................................................................. 24
Figura 3.4: Atividade de um marca-passo cardíaco com comportamento patológico: (a)
Resposta no tempo; (b) Espaço de fase; (c) Seção de Poincaré; (d) Espaço de fase e
seção de Poincaré............................................................................................................ 24
Figura 3.5: Atrator periódico de período-1: (a) Resposta no tempo em regime
permanente; (b) Espaço de Fase e seção de Poincaré. .................................................... 25
Figura 3.6: Modelo conceitual geral para o comportamento cardíaco. .......................... 26
Figura 3.7: Modelo conceitual do ECG normal. ............................................................ 31
Figura 3.8: Comparação entre o ECG normal numérico e o experimental. ................... 31
Figura 3.9: Espaços de fase relacionados ao ECG normal: (a) ECG, (b) Nódulo SA, (c)
Nódulo AV e (d) Feixe de His-Purkinje. ........................................................................ 32
Figura 3.10: Seções de Poincaré do ECG normal: (a) ECG, (b) Nódulo SA, (c) Nódulo
AV e (d) Feixe de His-Purkinje. ..................................................................................... 32
Figura 3.11: Expoentes de Lyapunov do ECG normal. .................................................. 33
ix
Figura 3.12: Modelo conceitual do ECG com flutter ventricular. .................................. 34
Figura
3.13:
ECG
com
flutter
ventricular
experimental
(ocw.tufts.edu/Content/50/lecturenotes/634401/634452) e numérico............................ 34
Figura 3.14: Espaços de fase do ECG com flutter ventricular: (a) ECG, (b) Nódulo AV e
(c) Feixe de His-Purkinje................................................................................................ 35
Figura 3.15: Seções de Poincaré relacionadas ao ECG com flutter ventricular: (a) ECG,
(b) Nódulo AV e (c) Feixe de His-Purkinje. .................................................................. 36
Figura 3.16: Expoentes de Lyapunov do ECG com flutter ventricular. ......................... 36
Figura 3.17: Modelo conceitual do ECG com fibrilação ventricular. ............................ 37
Figura 3.18: ECGs experimentais de pacientes com fibrilação ventricular. .................. 38
Figura 3.19: ECG numérico com fibrilação ventricular. ................................................ 39
Figura 3.20: Espaços de fase relacionados ao ECG com fibrilação ventricular: (a) ECG,
(b) Nódulo SA, (c) Nódulo AV e (d) Feixe de His-Purkinje.......................................... 39
Figura 3.21: Seções de Poincaré do ECG com fibrilação ventricular: (a) ECG, (b)
Nódulo SA, (c) Nódulo AV e (d) Feixe de His-Purkinje. .............................................. 40
Figura 3.22: Expoentes de Lyapunov do ECG com fibrilação ventricular. ................... 41
Figura 4.1: (a) OPI de período-2 identificada e (b) expoentes de Lyapunov máximos. 44
Figura 4.2: OPI de período-2 estabilizada, utilizando
e
: (a) Espaço de
fase em regime permanente; (b) Resposta no tempo; (c) Perturbação no tempo. .......... 45
Figura 4.3: (a) OPI de período-4 identificada e (b) expoentes de Lyapunov máximos. 46
Figura 4.4: (a) Bacia de atração considerando
e
; (b) Estado do sistema
no momento em que a ação de controle é iniciada. ........................................................ 46
Figura 4.5: OPI de período-4 estabilizada, considerando
,
e
: (a) Espaço de fase em regime permanente;
(b) Resposta no tempo; (c) Perturbação no tempo. ........................................................ 47
x
Figura 4.6: Órbita de período-1 encontrada, considerando
,
e
: (a) Espaço de fase; (b) Resposta no tempo em
regime permanente; (c) Perturbação no tempo. .............................................................. 48
Figura 4.7: Comportamento caótico encontrado, considerando
,
e
: (a) Espaço de fase; (b) Resposta no tempo; (c)
Perturbação no tempo. .................................................................................................... 49
Figura 4.8: OPI de período-4 estabilizada, considerando
,
e
: (a) Espaço de fase em regime permanente; (b)
Resposta no tempo; (c) Perturbação no tempo. .............................................................. 50
Figura 4.9: (a) OPI de período-10 e (b) expoentes de Lyapunov máximos. .................. 50
Figura 4.10: (a) Órbita de período-2 encontrada, utilizando
e
, e (b) a
perturbação no tempo. .................................................................................................... 51
Figura 4.11: (a) Órbita de período-1 encontrada, utilizando
e
, e (b) a
perturbação no tempo. .................................................................................................... 52
Figura 5.1: ECG com fibrilação ventricular (em preto tracejado) e do ECG com controle
(em rosa), utilizando a abordagem desacoplada, com
e
. ....................... 54
Figura 5.2: Espaços de fase do ECG com fibrilação ventricular (em preto) e do ECG
com controle (em rosa), utilizando a abordagem desacoplada, com
e
: (a)
ECG, (b) Nódulo SA, (c) Nódulo AV e (d) Feixe de His-Purkinje. ............................... 55
Figura 5.3: ECG com fibrilação ventricular (em preto tracejado) e do ECG com controle
(em rosa), utilizando a abordagem desacoplada, com
e
. ....................... 56
Figura 5.4: Espaços de fase do ECG com fibrilação ventricular (em preto) e do ECG
com controle (em rosa) , utilizando a abordagem desacoplada, com
e
:
(a) ECG, (b) Nódulo SA, (c) Nódulo AV e (d) Feixe de His-Purkinje. ......................... 56
xi
Figura 5.5: OPI de período-2 identificada: (a) Nódulo SA, (b) Nódulo AV e (c) Feixe de
His-Purkinje. ................................................................................................................... 58
Figura 5.6: OPI de período-2: Expoentes de Lyapunov máximos do sistema acoplado. 59
Figura 5.7: ECG com fibrilação ventricular (em preto tracejado) e do ECG com controle
(em rosa), utilizando a abordagem acoplada, com
e
. ............................ 59
Figura 5.8: Espaços de fase do ECG com fibrilação ventricular (em preto) e do ECG
com controle (em rosa), utilizando a abordagem acoplada, com
e
: (a)
ECG, (b) Nódulo SA, (c) Nódulo AV e (d) Feixe de His-Purkinje. ............................... 60
Figura 5.9: Perturbação no tempo utilizada na estabilização da OPI de período-2 do
sistema cardíaco acoplado. ............................................................................................. 60
Figura 5.10: OPI de período-4 identificada: (a) Nódulo SA, (b) Nódulo AV e (c) Feixe
de His-Purkinje. .............................................................................................................. 61
Figura 5.11: OPI de período-4: Expoentes de Lyapunov máximos do sistema acoplado.
........................................................................................................................................ 61
Figura 5.12: Espaços de fase do ECG com fibrilação ventricular (em preto) e do ECG
com controle (em rosa), utilizando a abordagem acoplada, com
ação de controle começando em
e
,ea
: (a) ECG, (b) Nódulo SA, (c) Nódulo AV e
(d) Feixe de His-Purkinje. .............................................................................................. 62
Figura 5.13: ECG com fibrilação ventricular (em preto tracejado) e do ECG com
controle (em rosa), utilizando a abordagem acoplada, com
e
, e a ação de
controle começando na vizinha da OPI de interesse. ..................................................... 63
Figura 5.14: Espaços de fase do ECG com fibrilação ventricular (em preto) e do ECG
com controle (em rosa), utilizando a abordagem acoplada, com
e
,ea
ação de controle começando na vizinha da OPI de interesse: (a) ECG, (b) Nódulo SA,
(c) Nódulo AV e (d) Feixe de His-Purkinje. .................................................................. 63
xii
Figura 5.15: Perturbação no tempo utilizada na estabilização da OPI de período-4 do
sistema acoplado. ............................................................................................................ 64
Figura 5.16: OPI de período-7 identificada: (a) Nódulo SA, (b) Nódulo AV e (c) Feixe
de His-Purkinje. .............................................................................................................. 64
Figura 5.17: OPI de período-7: Expoentes de Lyapunov máximos do sistema acoplado.
........................................................................................................................................ 65
Figura 5.18: Esquema do bloqueio de ramo do feixe de His (DUBIN, 1996). .............. 66
Figura
5.19:
ECG
com
flutter
auricular
(http://hugoveiga.atspace.com/Flutter_Auricular.htm). ................................................. 66
Figura 5.20: Espaços de fase do ECG com fibrilação ventricular (em preto) e do ECG
com controle (em rosa), utilizando
e
: (a) ECG, (b) Nódulo SA, (c)
Nódulo AV e (d) Feixe de His-Purkinje. ........................................................................ 68
Figura 5.21: Perturbação no tempo utilizada para suprimir o sistema em uma órbita de
período-1. ........................................................................................................................ 68
Figura 5.22: Espaços de fase do ECG com fibrilação ventricular (em preto) e do ECG
com controle (em rosa), utilizando
e
: (a) ECG, (b) Nódulo SA, (c)
Nódulo AV e (d) Feixe de His-Purkinje. ........................................................................ 69
Figura 5.23: Perturbação no tempo utilizada para suprimir o sistema em uma órbita de
período-2. ........................................................................................................................ 69
xiii
LISTA DE TABELAS
Tabela 3.1: Parâmetros para simulação dos ECGs. ........................................................ 29
xiv
LISTA DE SIGLAS
AV: Nódulo atrioventricular
DDE: Equação diferencial com defasagem temporal (do inglês “Differential Difference
Equation”)
ECG: Eletrocardiograma
EDO: Equação diferencial ordinária
ETDF: Realimentação com estados defasados estendidos (do inglês “Extended Time
Delayed Feedback”)
HP: Feixe de His-Purkinje
OGY: Ott-Grebogy-York
OPI: Órbita periódica instável
PPF: Realimentação com perturbação proporcional (do inglês “Proportional
Pertubation Feedback”)
SA: Nódulo sinoatrial
SC: Semi-contínuo
TDF: Realimentação com estados defasados (do inglês “Time Delayed Feedback”)
xv
1
INTRODUÇÃO
O organismo humano é composto por diversos sistemas interconectados e a
maioria deles possui características não lineares. Vários padrões caóticos já foram
detectados no organismo humano tais como a distribuição anatômica das árvores
arteriais, venosa, brônquica e do sistema His-Purkinje, além de variáveis fisiológicas
como o intervalo entre os batimentos cardíacos, a pressão arterial, o fluxo sanguíneo, a
respiração e a marcha, dentre outros (GODOY, 2003). Padrões caóticos encontrados no
sistema cardíaco estão associados a patologias severas indesejáveis. Sendo assim, é
importante encontrar estratégias para controlar ou suprimir o caos nos ritmos cardíacos.
A dinâmica dos ritmos cardíacos vem sendo amplamente estudada,
principalmente pelo fato do coração desempenhar um papel fundamental na fisiologia
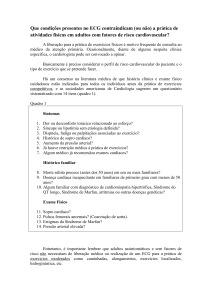
dos seres vivos. O coração é um órgão oco, musculoso e ativado por estímulos elétricos
que tem como função bombear o sangue para os pulmões, órgãos e tecidos. O coração
dos mamíferos é dividido em quatro cavidades: dois átrios e dois ventrículos, ilustrados
na Figura 1.1.
Figura 1.1: Esquema do coração (GOIS & SAVI, 2009).
O sistema de condução cardíaco pode ser tratado como uma rede de elementos
auto-excitatórios composta pelo nódulo sinoatrial (SA), nódulo atrioventricular (AV) e
1
o feixe de His-Purkinje (GOIS & SAVI, 2009; GRUDZINSKI & ZEBROWSKI, 2004),
onde a excitação elétrica é gerada primariamente em uma região especializada do átrio
direito, o nódulo SA. Ele inicia o impulso elétrico que se difunde sob a forma de onda,
estimulando ambas as aurículas. O impulso então alcança o nódulo AV, que é a conexão
elétrica entre os átrios e os ventrículos. O nódulo AV é estimulado, iniciando-se um
impulso elétrico que desce pelo feixe de His-Purkinje, de onde é distribuído para as
fibras de Purkinje, que transmitem o impulso elétrico para as células miocárdicas,
produzindo contração simultânea dos ventrículos. O nódulo AV é um componente
essencial da função cardíaca porque ele gera uma propagação com atraso que permite o
enchimento ventricular e assim facilita um eficiente bombeamento do sangue (SANTOS
et al., 2004).
No estado normal, o nódulo SA determina a frequência dos batimentos
cardíacos, sendo chamado de marca-passo cardíaco normal. O nódulo AV trabalha
como um marca-passo potencial, também denominado marca-passo ectópico ou foco
ectópico, que dispara em caso de falha na emissão do impulso elétrico vindo do nódulo
SA. Os marca-passos potenciais estão em todas as partes do coração, inclusive nos
átrios e nos ventrículos, determinando a cadência quando os mecanismos normais de
marca-passo falham (DUBIN, 1996).
Figura 1.2: Esquema de um ciclo cardíaco.
Existem diversas formas de se registrar e avaliar o funcionamento cardíaco. Na
maioria das vezes, esses registros são feitos através de medidas não invasivas.
Atualmente, o mecanismo mais utilizado é o eletrocardiograma (ECG) onde os
impulsos elétricos relacionados ao funcionamento cardíaco são registrados em forma de
ondas, representando a corrente elétrica em diferentes áreas do coração (SAVI, 2005). O
2
sinal captado pode ser utilizado para medir a frequência e a regularidade dos batimentos
cardíacos, assim como o tamanho e a posição das câmaras cardíacas.
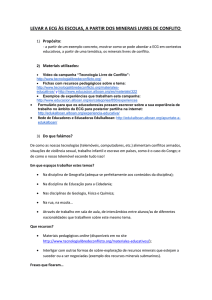
Na Figura 1.2 é apresentado o esquema de um ciclo cardíaco, composto
basicamente pela onda P, o complexo QRS e a onda T. A onda P representa o impulso
elétrico gerado pelo nódulo SA. Sua primeira parte representa a despolarização do átrio
direito, enquanto a segunda parte representa a despolarização do átrio esquerdo. Neste
momento o sangue está passando dos átrios para os ventrículos. O complexo QRS é a
parte do ECG que possui maior amplitude. Durante este processo o sangue é forçado
para fora dos ventrículos, indo do ventrículo esquerdo para os pulmões e do ventrículo
direito para todo o restante do corpo. A onda T representa a repolarização dos
ventrículos, a relaxação do coração. Neste período o sangue não oxigenado do corpo
entra no átrio direito, enquanto o sangue oxigenado vindo dos pulmões entra no átrio
esquerdo. Nesta ocasião, o coração está preparado para o próximo impulso (SANTOS et
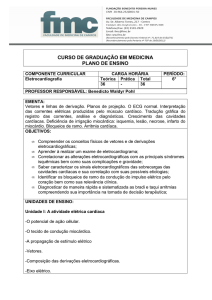
al., 2004). Na Figura 1.3 é apresentado o ECG de um adulto sadio. Observa-se que o
ECG apresenta ciclos contendo as três formas básicas de onda. Quando o traçado do
ECG não apresenta ciclos cardíacos que se repetem continuamente com um
comportamento aparentemente periódico significa que o coração possui algum tipo de
distúrbio.
Figura 1.3: ECG de um adulto normal
(library.med.utah.edu/kw/ecg/mml/ecg_normal.html).
A dinâmica dos batimentos cardíacos vem sendo analisada tanto através de
modelos matemáticos quanto através da análise de séries temporais. Van der Pol & Van
der Mark (1928) realizaram o primeiro estudo no qual foi esquematizada uma
representação dinâmica do coração. Nesse trabalho eles apresentaram uma analogia
entre as batidas do coração de mamíferos e um circuito eletrônico acoplado composto
por osciladores não lineares acoplados. Após este trabalho, alguns autores têm
3
desenvolvido modelos matemáticos que representam o sistema cardíaco real, com a
finalidade de compreender e prever com antecedência e eficácia possíveis anomalias
cardíacas.
Grudzinski & Zebrowski (2004) propuseram uma variação no oscilador de Van
der Pol original com o objetivo de reproduzir a série temporal do potencial de ação
gerado por um marca-passo natural cardíaco, isto é, nódulo SA ou nódulo AV. Santos et
al. (2004) apresentaram um modelo simplificado da dinâmica cardíaca composto por
dois osciladores de Van der Pol acoplados assimetricamente, representando o
comportamento dos dois marca-passos cardíacos, nódulo SA e AV, e das fibras
nervosas que transmitem os impulsos nervosos, discutindo diferentes termos de
acoplamento. Gois & Savi (2009) representaram ECGs através de um modelo
matemático composto por três osciladores de Van der Pol modificados, que representam
o nódulo SA, nódulo AV e o complexo His-Purkinje, conectados através de
acoplamentos defasados no tempo. Este modelo é capaz de reproduzir ECGs normais e
patológicos.
Arritmia significa, literalmente, sem ritmo. Entretanto, utiliza-se este termo para
indicar ritmos anormais ou interrupção na regularidade do ritmo cardíaco (DUBIN,
1996), sendo identificadas e diagnosticadas de forma rápida e precisa através do ECG
(DUBIN, 1996; GLASS & HUNTER, 1990). As arritmias são causadas pela
combinação do reingresso de impulsos às câmaras cardíacas com excitações geradas por
focos ectópicos anormais no coração. No entanto, as arritmias estão longe de serem
completamente compreendidas e bem controladas (SANTOS et al., 2004).
Diversos estudos caracterizam algumas arritmias cardíacas com base nos
princípios físicos da dinâmica não linear (CHRISTINI et al., 2001; FERREIRA et. al.,
2011; GARFINKEL et al., 1992, 1995; GLASS et al., 1983, 1987; GOIS & SAVI,
2009; KAPLAN & COHEN, 1990; SAVI, 2005) o que tem gerado novas formas de
análise e um maior interesse no campo cardiológico (SANTOS et al., 2004). Isso está
relacionado com as características determinísticas de algumas dessas arritmias
(WITKOWSKI et al., 1995). De uma maneira geral, o maior potencial para aplicação
terapêutica da teoria do caos está relacionado com as taquiarritmias aperiódicas,
incluindo a fibrilação atrial e ventricular. Isto é importante porque pode auxiliar no
diagnóstico de arritmias complexas e sugerir estratégias terapêuticas diferentes das
abordagens clássicas (BABLOYANTZ & DESTEXHE, 1988; CHRISTINI et al., 2001;
4
GLASS et al., 1983, 1987; KARMA & GILMOUR JR, 2007; GOIS & SAVI, 2009;
SAVI, 2005).
Wessel et al. (2007) apresentaram um panorama geral da física cardiovascular
apontando os desafios de se desenvolver métodos que sejam capazes de melhorar o
diagnóstico médico, diminuindo o risco para pacientes. Neste sentido, a física
cardiovascular interliga medicina, física, biologia, engenharia e matemática,
representando uma colaboração interdisciplinar de diversos especialistas. A análise da
dinâmica cardiovascular introduz a ideia de que os ritmos fisiológicos constituem uma
característica central da vida.
Glass et al. (1983) desenvolveram um modelo biológico da disritmia cardíaca e
analisaram, numérica e experimentalmente, as dinâmicas encontradas. Para isso, eles
estudaram os efeitos da estimulação periódica dos osciladores cardíacos, utilizando
dados experimentais das células ventriculares colhidas do coração de um pinto na forma
embrionária. Os resultados apontaram evidências de comportamentos relacionados à
dinâmica não linear como bifurcações por duplicação de período e dinâmica caótica
quando alterados os valores dos parâmetros das simulações. Alguns anos depois, Glass
et al. (1987) analisaram o modelo biológico desenvolvido anteriormente, aplicando-o na
interpretação de ritmos parasistólicos, verificando a existência da dinâmica não linear
nos dados numéricos e experimentais. Os ECGs experimentais foram retirados de
registros de Holters de pacientes ambulatoriais que apresentavam frequentes batimentos
ectópicos.
Com a ajuda de algumas ferramentas da dinâmica não linear, Babloyantz &
Destexhe (1988) estudaram os ECGs de quatro humanos sadios a fim de avaliar se a
atividade cardíaca normal apresentava as características dinâmicas de um oscilador
periódico. Eles verificaram que, mesmo o funcionamento cardíaco normal sendo
aparentemente periódico, ele segue a dinâmica determinística de natureza caótica e que
em poucos pacientes os dados não são inteiramente imprevisíveis.
Tong & Liu (1990) utilizaram um modelo matemático baseado na equação do
tipo Hodgkin-Huxley, onde foram incluídos alguns componentes de correntes iônicas,
para descrever o comportamento de células cardíacas e simular as curvas de transição de
fase dos osciladores. Com isto eles estudaram as interações de dois osciladores sinusais
acoplados e a estimulação periódica de um oscilador ventricular, além de esclarecer os
5
mecanismos de algumas arritmias. No mesmo ano, Kaplan & Cohen (1990) utilizaram
ECGs de cachorros em fibrilação para gerar uma representação do espaço de estados da
fibrilação ventricular e determinar se esta patologia é uma instância de caos
determinístico. Os resultados sugeriram que a fibrilação é similar a um sinal randômico
não caótico. Entretanto, eles observaram que o comportamento não caótico,
aparentemente aleatório, poderia ser gerado por sistemas determinísticos não lineares.
Witkowski et al. (1995) verificaram evidências determinísticas na fibrilação ventricular
aplicando um método de identificação de estruturas determinísticas em séries temporais
aos dados coletados do coração de cachorros induzidos a patologia eletricamente.
Bezerianos et al. (1995) utilizaram técnicas de análise de séries temporais não
lineares para calcular a dimensão de correlação de ECGs de pacientes saudáveis e de
pacientes que eram fumantes crônicos, em repouso e se exercitando moderadamente.
Eles concluíram que não havia diferenças dinâmicas importantes entre estes sinais,
observando evidências de atrator determinístico, cujas dimensões de correlação estariam
entre 5 e 6, quando a correlação temporal entre os pontos foi removida. Além disso, em
praticamente todos os casos, a transição do repouso para os exercícios moderados
implicou em um aumento na complexidade da dinâmica cardíaca.
Kantz & Schreiber (1998) investigaram séries temporais de ECGs de humanos
estabelecendo uma comparação entre aspectos estocásticos e determinísticos não
lineares. No final, os autores explicaram que “flutuações estocásticas, instabilidade
intrínseca e as mudanças no ambiente agem em conjunto para produzir os padrões
intrigantes observados”. Além disso, eles mostraram a importância da utilização de
ferramentas não lineares na investigação da dinâmica cardíaca.
Para confirmar se a resposta ventricular na fibrilação atrial é caótica, Stein et al.
(1999) desenvolveram um algoritmo de previsão não linear, analisando registros de
intervalos R-R de 16 pacientes durante fibrilação atrial crônica, investigando a
previsibilidade e a sensibilidade às condições iniciais desses conjuntos de dados. Eles
verificaram que o algoritmo, como é uma ferramenta para análise qualitativa de
sistemas dinâmicos, demonstrou que a fibrilação atrial não é um ritmo caótico. Christini
& Glass (2002) exibiram um panorama geral do mapeamento de arritmias cardíacas e
controle.
6
Gois & Savi (2009) realizam uma análise de séries temporais cardíacas
representadas pelos sinais de ECG. Consideram-se ECGs normais e com fibrilação
ventricular. É realizada uma comparação qualitativa entre os resultados obtidos através
da análise dos sinais gerados através do modelo matemático proposto e os obtidos
experimentalmente. O estudo confirma que o ECG normal está associado a um
comportamento periódico, enquanto a fibrilação ventricular está relacionada com o
caos.
1.1
Controle de caos
O controle de caos se baseia na riqueza de padrões periódicos existentes no
comportamento caótico e pode ser entendido como a utilização de pequenas
perturbações no sistema para estabilizar uma trajetória dentro desses comportamentos
periódicos (DE PAULA & SAVI, 2009 a, b; DE PAULA et al., 2012). Segundo Chen
(2001) os métodos de controle de caos possuem algumas propriedades características
importantes que os diferem dos métodos de controle convencionais e que são
específicas para tratar sistemas com respostas caóticas. Nos métodos de controle de caos
o controlador explora a sensibilidade a pequenas perturbações e o conjunto denso de
órbitas periódicas instáveis (OPIs) que os sistemas caóticos possuem. As OPIs são
padrões periódicos imersos no comportamento caótico. Neste contexto, o controlador é
projetado para estabilizar uma OPI de período qualquer conforme a necessidade do
usuário. Em situações reais onde o comportamento caótico não é desejável, chegando a
ser nocivo, torna-se importante intervir sobre o sistema, identificando e controlando ou
suprimindo este tipo de comportamento.
Os métodos de controle de caos podem ser classificados em contínuos e
discretos. Dentre os métodos de controle contínuos, os que mais se destacam são os
métodos por realimentação com espaços defasados (Time Delayed Feedback - TDF)
(PYRAGAS, 1992) e com espaços defasados estendidos (Extended Time Delayed
Feedback - ETDF) (SOCOLAR et al., 1994). Dentre os métodos discretos, os mais
consagrados são o OGY (OTT et al., 1990) e o semi-contínuo (SC) (HUBINGER et al.,
1994; KORTE et al., 1995), podendo também ser citados o OGY multiparâmetros (DE
PAULA & SAVI, 2008) e semi-contínuo multiparâmetros (DE PAULA & SAVI, 2009,
b).
7
O trabalho considerado marco inicial das pesquisas na área de controle de caos
foi proposto por Ott et al. (1990). Nele foi desenvolvido o método de controle discreto
chamado OGY, que possui esse nome em homenagem aos autores do trabalho OttGrebogi-Yorke. Além do OGY, outro método de considerável importância, utilizado na
estabilização de sistemas caóticos em OPIs, é o método TDF, proposto por Pyragas
(1992).
O método de controle TDF se baseia na realimentação da diferença entre estados
atual e defasado do sistema, possuindo as propriedades de inserir pequenas perturbações
no sistema e de ser independente do modelo dinâmico do sistema, o que favorece sua
implementação experimental. Entretanto, existe uma dificuldade na implementação
desta estratégia de controle, a determinação do tempo de defasagem e, principalmente,
do ganho do controlador. Normalmente, utiliza-se a periodicidade da órbita a ser
estabilizada como tempo de defasagem.
O método TDF se diferencia fundamentalmente do método OGY pelo fato do
primeiro exercer uma atuação contínua e ininterrupta sobre o sistema, o que favorece o
controle em sistemas contínuos muito instáveis, onde não é possível a estabilização
atuando somente quando o sistema cruza uma seção de Poincaré. Pyragas (1992)
observou que, em controladores baseados no método OGY, há uma permanente análise
computacional dos estados do sistema. Além disso, como a atuação é discreta no tempo,
existem dificuldades na estabilização de OPIs com alta instabilidade, associadas a
expoentes de Lyapunov positivos e elevados, se comparados com o tempo decorrido
entre estas perturbações. Pyragas (1992) ressaltou também que um controlador discreto
possui uma maior sensibilidade a ruídos externos se comparado com controladores
contínuos.
Socolar et al. (1994) propuseram uma alternativa ao método original, o método
ETDF, visando contornar a dificuldade do TDF em estabilizar OPIs de periodicidade
elevada, utilizando vários estados defasados do sistema e considerando um novo ganho
na lei de controle.
No ano seguinte, Pyragas (1995) define uma região de valores dos ganhos de
controle com os quais o controlador se torna eficiente, além de definir a qualidade do
controle nesta região. Isto é feito através do cálculo do expoente de Lyapunov máximo
8
de alguns sistemas dinâmicos onde é aplicada a estratégia de controle ETDF. Entretanto,
para isso, é necessário o conhecimento das equações de governo destes sistemas.
A análise de estabilidade de sistemas realimentados por funções que possuem
defasagens temporais é muito difícil. Segundo Pyragas (2001), utilizando o método
TDF é possível estabilizar somente uma certa classe de OPIs caracterizadas por uma
torção finita no espaço. Assim, qualquer OPI com um número ímpar de multiplicadores
de Floquet reais maior que um não pode ser estabilizada através do TDF. Esta afirmação
é provada, primeiramente, por Ushio (1996) para sistemas discretos e, posteriormente,
Just et al. (1997) e Nakajima (1997) para sistemas contínuos. No ano seguinte,
Nakajima e Ueda (1998) provam esta mesma limitação para o método ETDF. Então,
Pyragas (2001) propõe um controlador instável baseado no método ETDF que elimina
totalmente esta limitação do método.
Kapitaniak (2005) apresenta uma revisão de alguns métodos básicos de controle
de caos, com e sem realimentação, e da sincronização de caos. Além disso, são
mostradas algumas aplicações numéricas e experimentais dos métodos apresentados. No
ano seguinte, Pyragas (2006) realiza uma revisão dos métodos contínuos para controle
de caos desenvolvidos a partir do TDF citando implementações experimentais e
aplicações numéricas.
De Paula & Savi (2009 a) utilizaram métodos contínuos em um pendulo não
linear, definindo os parâmetros do controlador a partir do cálculo do expoente de
Lyapunov de uma OPI. Bessa et al. (2009) propuseram um controlador robusto baseado
em uma estratégia de controle por modo deslizante, aprimorado com um sistema de
inferência fuzzy adaptativo estável que lida com as imprecisões da modelagem.
Simulações numéricas são realizadas considerando um pêndulo não linear. Os
resultados mostram que o controlador é capaz de realizar o controle de caos, mesmo em
situações em que estão envolvidas grandes incertezas. De Paula et al. (2012) aplicaram
o método de controle ETDF para controlar bifurcações em um sistema pendular
utilizado para colheita de energia a partir das ondas do mar.
De Paula & Savi (2011) apresentam uma análise comparativa da capacidade de
estabilização de diferentes estratégias de controle. São analisados seis métodos
discretos, OGY, OGY multiparâmetros, SC e SC multiparâmetros, abordagem acoplada
e desacoplada, e dois métodos contínuos, TDF e ETDF. Os métodos SC e SC
9
multiparâmetros, abordagens acopladas e desacopladas, apresentam um desempenho
melhor na estabilização do sistema livre de ruídos. O método SC multiparâmetros
acoplado é o que apresenta a melhor eficácia dentre os métodos analisados. Sendo que a
abordagem desacoplada também apresenta uma eficácia alta e dispensa a determinação
de alguns parâmetros de controle. O método ETDF se mostrou menos eficaz porque
estabiliza poucas OPIs, apresenta dificuldades na estabilização de OPIs de alta
periodicidade e algumas órbitas estabilizadas são diferentes das desejadas, mas, como
vantagem, cabe ressaltar que sua atuação começa assim que se inicia a fase de controle.
Na presença de ruídos, o método ETDF apresentou um desempenho muito superior aos
demais métodos. Entretanto, o método SC multiparâmetros desacoplado apresentou um
bom desempenho, mantendo as características mencionadas anteriormente.
1.1.1
Controle de caos aplicado aos ritmos cardíacos
O controle da dinâmica biológica é importante para ciências médicas uma vez
que ritmos fisiológicos anormais podem ocasionar risco à vida (HALL et al., 1997).
Diversos estudos evidenciaram a natureza não linear de alguns ritmos cardíacos, bem
como a utilização de estratégias de controle para eliminar ou suprimir respostas
patológicas críticas (ATTARSHARGHI et al., 2009; CHRISTINI et al., 2001;
DUBLJEVIC et al., 2008; FERREIRA et. al., 2011; GARFINKEL et. al., 1992, 1995;
GLASS et al., 1983, 1987; GOIS & SAVI; 2009; HALL et al., 1997; KARMA &
GILMOUR JR, 2007; LÓPEZ et al., 2010; SAVI, 2005).
O controle de batimentos cardíacos irregulares ou caóticos é uma questão
fundamental em cardiologia. Existem algumas estratégias de controle baseadas tanto no
uso de fontes externas de sinais periódicos e quasi-periódicos, bem como a utilização de
pequenas perturbações para estabilizar órbitas periódicas imersas na dinâmica do
sistema (GRUDZINSKI & ZEBROWSKI, 2004).
Um dos trabalhos pioneiros na utilização de técnicas de controle de caos
aplicadas à dinâmica dos ritmos cardíacos foi elaborado por Garfinkel et al. (1992;
1995). Eles aplicaram uma estratégia de controle de caos por realimentação com
perturbação proporcional (Proportional Pertubation Feedback – PPF), baseada no
método de controle OGY, no tecido ventricular de coelhos in vitro no qual a arritmia foi
induzida por drogas.
10
Hall et al. (1997) aplicaram a estratégia de controle ETDF em amostras de
coração de 5 coelhos dissecados estimuladas eletricamente a fim de suprimir um tipo de
arritmia, conhecida como alternância cardíaca. A alternância dos ritmos cardíacos é
caracterizada por uma alternação de ajuste ou morfológica da atividade elétrica do
coração entre um batimento e outro. Os autores propuseram um mapa como modelo do
ritmo cardíaco e o controle da alternância foi realizado direcionando o sistema para o
ponto fixo instável. Dubljevic et al. (2008) analisaram a capacidade do método de
controle PPF, proposto por Garfinkel et al. (1992; 1995), em suprimir, em tempo real,
alternâncias cardíacas no coração extraído de coelhos.
Christini et al. (2001) aplicaram um algoritmo de controle de caos adaptativo
para controlar um tipo de arritmia clínica de baixa dimensionalidade, a arritmia
reentrante. Essa técnica se mostrou eficaz em 52 das 54 tentativas de controle feitas em
cinco pacientes, sendo muito eficaz já que não é necessária uma fase de aprendizagem,
podendo ser aplicada assim que a arritmia é detectada no paciente.
Attarsharghi et al. (2009) utilizaram o mapa logístico para modelar o intervalo
entre batimentos durante arritmias cardíacas e aplicaram um método de controle
adaptativo com realimentação defasada para evitar ou controlar esse tipo de
comportamento patologicamente indesejado.
López et al. (2010) utilizaram um algoritmo de controle baseado no ganho
proporcional do controlador e na norma
de monitoramento do sinal de erro, aplicado
ao modelo cardíaco proposto por Gois & Savi (2009), com a finalidade de retirar o
batimento cardíaco de um comportamento cardio-patológico.
Ferreira et al. (2011) aplicaram o método de controle ETDF a um marca-passo
natural cardíaco, modelado pela equação de Van der Pol modificada proposta por
Grudzinski & Zebrowski (2004) a fim de avaliar a eficácia deste método para controlar
ou suprimir respostas caóticas, evitando comportamentos que estivessem associados a
patologias cardíacas críticas.
1.2
Objetivo do trabalho
Neste trabalho propõe-se uma análise da dinâmica dos ritmos cardíacos,
avaliando
situações
normais
e
patológicas,
11
associadas
respectivamente
aos
comportamentos periódicos e caóticos. Além disso, aplica-se o controle de caos para
estabilizar órbitas periódicas instáveis.
Neste sentido, o trabalho é dividido em duas etapas. Primeiramente, apresenta-se
uma modelagem matemática da dinâmica do coração considerando três osciladores
acoplados, conforme sugerido por Gois & Savi (2009). Cada marca-passo é modelado
utilizando um oscilador de Van der Pol modificado conforme proposto por Grudzinski
& Zebrowski (2004). Duas situações são tratadas: marca-passo natural e sistema
cardíaco com 3 osciladores.
O método de controle de caos ETDF é utilizado nas duas situações. Essa
estratégia de controle é escolhida pela facilidade na implementação, por realizar uma
atuação contínua sobre o sistema e por essa atuação começar assim que se inicia a fase
de controle. Isso é vantajoso quando se trata da aplicação em sistemas biológicos
complexos, evitando um tempo de espera para o início da atuação, necessário quando
aplicam-se os métodos de controle de caos discretos e semi-contínuos. A ideia é avaliar
uma situação caótica, verificando a eficácia do método em eliminar esse comportamento
indesejado do coração.
1.3
Organização do trabalho
Este texto é dividido em 5 capítulos. Este primeiro capítulo apresenta uma
introdução ao trabalho, abordando suas motivações, objetivos e organização. Além
disso, é apresentada uma revisão bibliográfica sobre os modelos matemáticos propostos
para representar o funcionamento do coração e seus marca-passos naturais. A presença
de comportamento não linear e resposta caótica associada aos ritmos cardíacos, em
especial os patológicos, principalmente nas arritmias cardíacas, também é discutida.
Além disso, discute-se a literatura sobre a aplicação, numérica e experimental, de
técnicas de controle de caos no controle ou supressão desse tipo de comportamento nos
ritmos cardíacos.
No Capítulo 2 é apresentado o método de controle ETDF. Além disso, mostra-se
como é realizada a identificação das OPIs e o cálculo do expoente de Lyapunov de uma
OPI, utilizado na determinação dos parâmetros do controlador.
No Capitulo 3 são apresentados os modelos matemáticos utilizados para
reproduzir o funcionamento do coração. Inicialmente, apresenta-se o modelo utilizado
12
para reproduzir o comportamento periódico e caótico de um marca-passo natural
cardíaco. Em seguida, é apresentado um modelo matemático utilizado para reproduzir
os ritmos representados por sinais de ECG. Simulações numéricas são realizadas para
mostrar a dinâmica dos ritmos cardíacos.
No Capítulo 4 a estratégia de controle ETDF é aplicada em um dos marca-passos
naturais cardíacos a fim de avaliar a capacidade desta técnica em eliminar ou suprimir
respostas caóticas patológicas indesejadas. Já no Capítulo 5 o método de controle ETDF
é aplicado ao sistema que descreve o ECG com fibrilação ventricular, analisando sua
eficácia em controlar ou minimizar os efeitos desta patologia.
Finalmente, no Capítulo 6 são apresentadas as conclusões referentes ao trabalho.
13
2
MÉTODO DE CONTROLE DE CAOS
A ideia central dos métodos de controle de caos é estabilizar as OPIs imersas na
dinâmica do sistema utilizando pequenas perturbações, ou seja, com um pequeno gasto
de energia. Nesse sentido, o controle de caos pode ser entendido como uma técnica
dividida em duas etapas. Na primeira etapa ou fase de aprendizagem identificam-se as
OPIs imersas no atrator do sistema e determinam-se os valores dos parâmetros do
controlador. A segunda etapa ou fase de controle consiste no emprego da lei de controle
utilizando os parâmetros definidos anteriormente para impor as perturbações necessárias
à estabilização da OPI previamente escolhida. Vale ressaltar que é determinado um
conjunto de parâmetros do controlador para cada OPI que se deseja estabilizar.
Neste capítulo, primeiramente é apresentado o método utilizado para
identificação das OPIs. Em seguida aborda-se o método de controle ETDF. E,
finalmente, discute-se a determinação dos parâmetros do controlador que é realizada
através do cálculo do expoente de Lyapunov de uma OPI.
2.1
Identificação de órbitas periódicas instáveis (OPIs)
A identificação das OPIs consiste numa fase fundamental no emprego dos
métodos de controle de caos. Neste trabalho, utiliza-se pelo método dos pontos
recorrentes próximos, proposto por Auerbach et al. (1987), para esta identificação. Este
procedimento deve ser implementado em uma seção de Poincaré a partir de uma série
temporal. Considerando-se um forçamento periódico sobre o sistema, a seção de
Poincaré representa uma amostra estroboscópica onde os seus pontos são determinados
sempre que o forçamento passa por uma fase definida. A busca de uma órbita kperiódica é realizada varrendo-se todos os pontos da série temporal contidos na seção de
Poincaré,
, verificando-se quais os pares que satisfazem à condição:
(2.1)
14
onde
é o número total de pontos na seção de Poincaré,
se distinguir os pontos recorrentes e
encontrar.
Quando
essa
condição
é a tolerância na qual pode-
é o período máximo da órbita que se deseja
é
satisfeita,
armazenam-se
os
pontos
pertencentes à órbita -periódica, localizada na seção de Poincaré
referente à fase de forçamento escolhida.
Durante essa busca, uma determinada órbita pode ser visitada mais de uma vez,
sendo então necessário verificar dentre as órbitas de mesmo período, aquelas que podem
ser consideradas idênticas a menos de uma tolerância
que mede a distância entre duas
órbitas. Se duas órbitas equivalentes forem encontradas para um dado período, faz-se a
aproximação da órbita real pela sua média aritmética.
2.2
Método de controle por realimentação com estados defasados estendidos
(ETDF)
O método de controle TDF foi o primeiro método de controle de caos contínuo
proposto (PYRAGAS, 1992). Entretanto, apesar de apresentar um bom desempenho
quando aplicado numérica e experimentalmente, este método apresenta falhas na
estabilização de OPIs de elevada periodicidade. Para contornar essa limitação, Socolar
et al. (1994) propuseram o método de controle ETDF. Essa estratégia de controle pode
ser modelada por um conjunto de equações diferenciais ordinárias (EDOs) não lineares
conforme apresentado a seguir:
(2.2)
onde
e
enquanto
são variáveis de estado,
e
definem a dinâmica do sistema
está associado a ação de controle. O método ETDF se baseia na
realimentação da diferença entre o estado atual e os estados defasados do sistema. A
perturbação é dada por:
15
(2.3)
onde
,
,
é a defasagem no tempo,
parâmetros do controlador. Em geral,
e
são os
é infinito, mas pode ser definido em função do
sistema dinâmico. Cabe ressaltar que para qualquer valor de
e
, a perturbação da
Equação (2.3) é nula quando a trajetória do sistema está sobre uma OPI uma vez que
para todo
se
, onde
acordo com a escolha correta dos valores
e
é a periodicidade da -ésima OPI. De
torna-se possível estabilizar o sistema
em uma de suas OPIs. Cabe mencionar que o método ETDF é equivalente ao TDF
original quando
.
O sistema dinâmico obtido, incluindo a lei de controle, Equações (2.2) e (2.3), é
composto por equações diferenciais com defasagem temporal (Differential Difference
Equation - DDE). Para resolver esse tipo de equação é necessário considerar uma
função inicial
no intervalo –
. Neste trabalho, essa função é estimada
a partir da expansão em série de Taylor conforme proposto por Cunningham (1954) e
apresentado a seguir:
(2.4)
Com isso, o seguinte sistema é obtido:
,
onde
.
16
(2.5)
Verifica-se que as DDEs têm dependência de estados do sistema em instantes de
tempo anteriores, ao contrário das EDOs que dependem somente da solução do sistema
no estado presente. Durante a integração do sistema é necessário lidar com esses estados
defasados. Neste trabalho, o método de Runge-Kutta de quarta ordem com interpolação
linear das variáveis defasadas no tempo é utilizado para integração numérica do sistema
(MENSOUR & LONGTIN, 1997).
Nota-se que a expansão em série de Taylor é utilizada somente no início da
integração, enquanto
. Uma abordagem alternativa seria adotar o início da
ação de controle somente quando todos os estados defasados necessários são
conhecidos,
(DE PAULA et al., 2012; FERREIRA et al., 2011). Neste
trabalho, consideram-se três estados defasados do sistema,
. Dessa forma, na
Equação (2.5) tem-se que as perturbações realizadas pelo controlador têm início apenas
quando
, sendo
o tempo inicial da integração.
Durante a fase de aprendizagem é feita a identificação das OPIs e a determinação
dos parâmetros do controlador,
e
. Em seguida inicia-se a fase de controle
propriamente dita com a aplicação das leis de controle, utilizando os parâmetros
definidos anteriormente para determinar as perturbações necessárias à estabilização da
OPI escolhida. Neste trabalho, analisa-se o expoente de Lyapunov de cada OPI de
interesse para definir os parâmetros do controlador (DE PAULA & SAVI, 2009 a; DE
PAULA et al., 2012; FERREIRA et al., 2011), conforme apresentado a seguir.
2.2.1
Expoente de Lyapunov de uma OPI
No método de controle ETDF constrói-se uma perturbação contínua no tempo
conforme apresentado na Equação (2.3). A ideia dessa estratégia de controle é que a
OPI de interesse, contida no atrator do sistema, não seja modificada, mas apenas seus
expoentes de Lyapunov (PYRAGAS, 1995), ou seja, somente sua estabilidade. Neste
sentido, é necessário escolher os parâmetros do controlador de forma que os expoentes
de Lyapunov se tornem todos negativos. No entanto, considerando-se um sistema não
autônomo para a análise da estabilidade de OPIs é suficiente determinar apenas o maior
expoente de Lyapunov (PYRAGAS, 1995). Em outras palavras, é necessário buscar
situações onde o expoente de Lyapunov máximo seja negativo (DE PAULA & SAVI,
2009 a; DE PAULA et al., 2012; FERREIRA et al., 2011). Desta forma, a partir do
17
maior expoente de Lyapunov é possível obter intervalos de valores de
, considerando
constante, onde o controle pode ser alcançado.
O cálculo do expoente de Lyapunov de DDEs é mais complicado do que de
EDOs. Isso acontece porque os termos associados com a lei de controle do ETDF,
Equação (2.3), envolvem o conhecimento de estados do sistema defasados no tempo.
Considerando três estados defasados,
, observa-se que a equação do sistema,
Equação (2.2), consiste na DDE mostrada a seguir:
(2.6)
Portanto, o cálculo de
num instante maior que
conhecimento prévio da função
, com
implica no
, no intervalo
, onde
corresponde à dimensão do sistema sem a lei de controle. Equações deste tipo consistem
em sistemas de dimensão infinita e devem apresentar infinitos expoentes de Lyapunov,
dos quais apenas uma quantidade finita pode ser determinada a partir de uma análise
numérica. No entanto, para análise de estabilidade de OPIs em sistemas não autônomos
é suficiente determinar apenas o maior expoente de Lyapunov,
, situação
em que a órbita torna-se estável (PYRAGAS, 1995).
Neste trabalho, o cálculo do expoente de Lyapunov é conduzido aproximando-se
a evolução contínua do sistema de dimensão infinita por um número finito de elementos
cujos valores mudam em passos discretos no tempo (FARMER, 1982). Neste contexto,
a função
, no intervalo
pode ser aproximada por
espaçadas entre si por intervalos de tempo de
integração. Desta forma, ao invés de
agora consideram-se
funções
defasados de
, que corresponde ao passo de
variáveis de estado mostradas na Equação (2.6),
variáveis. Estas variáveis estão representadas pelo vetor
, onde os componentes
sistema no tempo
amostras
estão relacionados com as funções originais do
e os componentes
nos períodos de tempo
são valores das
, relacionados aos estados
no intervalo
.
18
(2.7)
∆ , …,
− ∆
Neste trabalho, essa aproximação é realizada com base no procedimento
utilizado por Sprott (2007). Sendo assim, a partir das variáveis definidas, representadas
no vetor
, a DDE é substituída por um conjunto de EDOs. Com isso, o sistema
contínuo de dimensão infinita apresentado na Equação (2.6) é representado por
EDOs de dimensão finita, conforme apresentado a seguir:
,
onde
(2.8)
. Este sistema pode ser resolvido por qualquer método de
integração padrão, como o Runge-Kutta de quarta ordem. Utilizando a representação
apresentada na Equação (2.8) pode-se calcular os expoentes de Lyapunov a partir do
algoritmo de Wolf et al. (1985). Além disso, a fim de calcular o expoente de uma OPI
específica, o sistema é integrado ao longo da órbita de interesse.
19
3
MODELAGEM
MATEMÁTICA
DO
FUNCIONAMENTO
CARDÍACO
Neste capítulo são apresentados os modelos matemáticos utilizados para
reproduzir o funcionamento do coração. Inicialmente, é apresentado o modelo usado
para reproduzir o comportamento do potencial de ação gerado por um marca-passo
natural cardíaco. Usualmente, esse marca-passo é o nódulo SA, mas também pode
representar o nódulo AV. Neste trabalho, utiliza-se o modelo proposto por Grudzinski
& Zebrowski (2004). Simulações numéricas são realizadas a fim de reproduzir os
comportamentos periódicos e caóticos, assim como a coexistência de atratores.
Em seguida é apresentado um modelo matemático do sistema cardíaco que
reproduz os sinais de ECG. Utiliza-se o modelo conceitual proposto por Gois & Savi
(2009) que considera três osciladores acoplados, conectados com acoplamentos com
defasagem temporal. Realizam-se simulações numéricas com a finalidade reproduzir o
ritmo cardíaco normal, bem como algumas patologias. Os expoentes de Lyapunov são
empregados para definir a caoticidade dos sinais obtidos.
3.1
Modelo matemático de um marca-passo natural cardíaco
O primeiro trabalho utilizando o oscilador de Van der Pol ocorreu em 1928
(VAN DER POL & VAN DER MARK, 1928) com a criação de um circuito eletrônico
composto por uma lâmpada de neon, um capacitor, um resistor e uma bateria. Este
sistema possuía um comportamento não linear e, com ele, os autores esquematizaram
uma representação dinâmica do coração. Esta foi à primeira vez em que sistemas de
osciladores não lineares foram aplicados com esta finalidade. A partir daí, a equação de
Van der Pol tem sido frequentemente utilizada em modelos teóricos das funções
cardíacas já que as características presentes nos sistemas biológicos apresentam grande
semelhança com sua resposta dinâmica, tais como ciclo limite, sincronização e caos
(FERREIRA et al., 2011; GOIS & SAVI, 2009; GRUDZINSKI & ZEBROWSKI, 2004;
SAVI, 2005). Além disso, a equação de Van der Pol adapta sua frequência intrínseca à
frequência do sinal acionado sem alterar sua amplitude, o que se torna muito importante
já que o marca-passo cardíaco é um elemento que possui uma frequência muito elevada,
a qual todos os outros osciladores devem se ajustar (GRUDZINSKI & ZEBROWSKI,
20
2004). Segundo Santos et al. (2004), outros critérios que justificam a utilização da
equação de Van der Pol como modelo fenomenológico do batimento cardíaco, tais
como: (i) a simplicidade paramétrica; (ii) cada oscilador, quando não acoplado a outros,
apresenta um ciclo limite único e estável; (iii) a amplitude da oscilação independe da
taxa de oscilação; e (iv) o oscilador está apto a ter uma resposta em frequências com
valores diferentes, quando comparadas com suas frequências naturais e livres.
Figura 3.1: Esboço do espaço de fase do oscilador de Van der Pol modificado proposto
por Postnov et al. (1999).
O modelo proposto por Grudzinski & Zebrowski (2004) se baseia no oscilador
de Van der Pol modificado proposto por Postnov et al. (1999) e é utilizado para
reproduzir o comportamento do potencial de ação gerado por um marca-passo natural
do coração.
No oscilador proposto por Postnov et al. (1999), Equação (3.1), o forçamento
harmônico da equação clássica é substituído por um forçamento cúbico não linear.
(3.1)
onde
determina a amplitude do sinal. Um esboço do espaço de fase deste oscilador
está ilustrado na Figura 3.1, onde observa-se a presença de três pontos de equilíbrio,
, um centro, uma sela e um nó estável, respectivamente.
Entretanto, este modelo não permite modificar a distância entre a sela e o nó.
Para realizar essa mudança sem alterar a estrutura do espaço de fase, Grudzinski &
21
Zebrowski (2004) introduziram o parâmetro
. Isso permite controlar o período de
contração auricular ou ventricular. Além disso, Grudzinski & Zebrowski (2004)
substituíram o termo de amortecimento,
, por um termo assimétrico,
. Para preservar a característica auto-excitatória do sistema,
possuir sinais opostos
e
têm que
). A equação do novo sistema está apresentada a
seguir:
(3.2)
onde
modifica o formato do pulso, o que resulta na alteração do tempo que o coração
recebe o estímulo, e
é um forçamento externo.
Neste trabalho, o oscilador de Van der Pol modificado, modelado através da
Equação (3.2), é utilizado para reproduzir alguns comportamentos de um dos marcapassos cardíacos, normal ou patológicos. Para simular esses comportamentos, são feitas
modificações em alguns parâmetros do sistema.
3.1.1
Simulações numéricas
Simulações numéricas de um marca-passo cardíaco, modelado através da
Equação (3.2), são realizadas de forma a avaliar o comportamento dinâmico do sistema
para diferentes parâmetros e condições de forçamento, reproduzindo as respostas
periódicas e caóticas, relacionadas respectivamente aos comportamentos normais e
patológicos.
Em todas as simulações utiliza-se o método de Runge-Kutta de quarta ordem
para integrar o sistema. Além disso, é importante mencionar que as séries temporais
associadas ao funcionamento do marca-passo natural cardíaco possuem
sendo
o número de pontos por período de forçamento e
passo de integração
, sendo
pontos,
o número de períodos, e
a frequência de forçamento. Consideram-
se os seguintes parâmetros obtidos a partir de uma análise de convergência:
.
22
e
Inicialmente, analisa-se uma resposta periódica associada à atividade normal de
um marca-passo natural cardíaco. Para isso, utilizam-se os parâmetros propostos por
Grudzinski & Zebrowski (2004),
,
e
,
,
,
,
. A Figura 3.2 mostra a resposta típica
através da história temporal e do espaço de fase. Observe as características típicas de
um comportamento periódico.
(a)
(b)
Figura 3.2: Atividade normal de um marca-passo natural cardíaco em regime
permanente: (a) Resposta no tempo; (b) Espaço de fase.
Respostas caóticas em sistemas cardíacos podem estar associadas a
funcionamentos patológicos, como a fibrilação ventricular que é uma das arritmias
cardíacas mais perigosas e que traz maior risco à vida dos pacientes (ATTARSHARGHI
et al., 2009; CHRISTINI et al., 2001; DUBLJEVIC et al., 2008; FERREIRA et. al.,
2011; GARFINKEL et. al., 1992, 1995; GLASS et al., 1983, 1987; GOIS & SAVI;
2009; HALL et al., 1997; KARMA & GILMOUR JR, 2007; LÓPEZ et al., 2010;
SAVI, 2005). Para representar uma atividade cardíaca patológica alguns parâmetros do
sistema foram alterados. Nessa condição, considera-se
,
e
, onde
e
,
,
,
. A Figura 3.3 apresenta a
bacia de atração do sistema para os parâmetros considerados, mostrando a coexistência
de um atrator periódico de período-1 (pontos pretos) e um atrator caótico (pontos rosa).
Note a multiestabilidade do sistema relacionada à coexistência de atratores.
23
Figura 3.3: Bacia de atração com coexistência de um atrator periódico de período-1 (em
preto) e um atrator caótico (em rosa).
O atrator caótico pode ser observado na Figura 3.4, que apresenta a resposta do
sistema no tempo, o espaço de fase e a seção de Poincaré para
, uma condição pertencente à bacia caótica.
(a)
(b)
(c)
(d)
Figura 3.4: Atividade de um marca-passo cardíaco com comportamento patológico: (a)
Resposta no tempo; (b) Espaço de fase; (c) Seção de Poincaré; (d) Espaço de fase e
seção de Poincaré.
24
Considerando-se agora diferentes condições iniciais,
, pertencente à bacia periódica, obtém-se um atrator periódico de período-1. A
Figura 3.5 ilustra a resposta no tempo em regime permanente e o espaço de fase com a
sua seção de Poincaré.
(a)
(b)
Figura 3.5: Atrator periódico de período-1: (a) Resposta no tempo em regime
permanente; (b) Espaço de Fase e seção de Poincaré.
Essas simulações mostram os comportamentos periódico e caótico de um marcapasso natural cardíaco. Na próxima seção apresenta-se um modelo matemático que
reproduz os sinais de ECG.
3.2
Modelo matemático do sistema cardíaco
Muitos estudos vêm sendo desenvolvidos no sentido de modelar a dinâmica dos
ritmos cardíacos (ABARBANEL, 1996; FERREIRA et al., 2011; GOIS & SAVI, 2009;
GRUDZINSKI & ZEBROWSKI, 2004; HODKIN & HUXLEY, 1952; SANTOS et al.,
2004; VAN DER POL & VAN DER MARK, 1928). Esses modelos são utilizados como
ferramenta de análise ou, até mesmo, de predição do comportamento do coração,
possibilitando a elaboração de estratégias de prevenção de algumas patologias,
principalmente as que possam culminar no óbito do paciente.
Basicamente, o funcionamento do coração está associado à emissão de um
impulso elétrico pelo nódulo SA que se difunde sob a forma de onda, estimulando as
aurículas. Quando essa onda alcança o nódulo AV, ele é estimulado e inicia um impulso
25
que desce pelo feixe de His-Purkinje, de onde é transmitido para as fibras de Purkinje e
para as células miocárdicas.
A combinação das ondas advindas do nódulo SA, nódulo AV e do feixe de HisPurkinje é responsável por formar o traçado do ECG. Desta forma, espera-se que
osciladores acoplados possam representar a dinâmica geral do batimento cardíaco, onde
cada um dos osciladores representa o sinal de uma região diferente do coração (GOIS &
SAVI, 2009).
Usualmente, a literatura apresenta modelos matemáticos da dinâmica cardíaca
utilizando dois osciladores acoplados, representando fisiologicamente os nódulos SA e
AV. Entretanto, verifica-se que esses dois osciladores não são capazes de reproduzir o
sinal do ECG porque o primeiro oscilador corresponde à ativação do nódulo SA e dos
átrios e o segundo oscilador corresponde à ativação do nódulo AV. Neste contexto, Gois
& Savi (2009) incluíram um terceiro oscilador em seu modelo conceitual, representando
a propagação do impulso através dos ventrículos. Este terceiro oscilador representa
fisiologicamente o feixe de His e as fibras de Purkinje.
O modelo conceitual proposto por Gois & Savi (2009) e utilizado neste trabalho
é apresentado na Figura 3.6, onde estão ilustrados os osciladores, os acoplamentos entre
eles e os forçamentos externos incorporados ao sistema. Considera-se que todos os
acoplamentos são assimétricos e bidirecionais com a finalidade de construir um modelo
geral que seja capaz de reproduzir a maioria dos comportamentos cardíacos.
Figura 3.6: Modelo conceitual geral para o comportamento cardíaco.
26
O modelo conceitual é representado matematicamente pelo conjunto de equações
diferenciais apresentado na Equação (3.3). Este modelo é similar ao utilizado por Gois
& Savi (2009). Entretanto, neste trabalho, os osciladores que compõem as equações de
governo do sistema são modelados utilizando a equação de Van der Pol modificada
proposta por Grudzinski & Zebrowski (2004), Equação (3.2).
(3.3)
onde
é um forçamento externo,
, com
é o termo de acoplamento e
representando a defasagem e
, onde
corresponde a
dimensão do sistema. Nota-se que os termos associados aos acoplamentos possuem
defasagens temporais,
, que foram inseridas a fim de reproduzir o tempo gasto na
transmissão dos sinais entre as regiões do coração. Sendo assim, verifica-se que o
sistema proposto é um sistema de equações diferenciais com defasagem, DDEs, sendo
no intervalo –
necessário estimar uma função inicial
.
Segundo Gois & Savi (2009), a ideia geral dos osciladores acoplados é que o
sinal do ECG seja formado pela composição dos sinais de cada um dos osciladores.
Sendo assim, o sinal do ECG é dado pela combinação linear mostrada na Equação
(3.4), abaixo:
27
.
(3.4)
E, analogamente, define-se:
(3.5)
3.2.1
Reprodução dos sinais do ECG
Simulações numéricas são realizadas com a finalidade de avaliar se o modelo
proposto para representar os ritmos cardíacos apresenta uma boa concordância
qualitativa com os sinais de ECG experimentais.
Como o modelo matemático é composto por DDEs faz-se necessário estimar
soluções do sistema em instantes de tempo anteriores a
. Para isso, é realizada uma
expansão em série de Taylor (CUNNINGHAM, 1954), conforme apresentado na
Equação (2.4). Além disso, utiliza-se o método de Runge-Kutta de quarta ordem com
interpolação linear das variáveis defasadas no tempo (MENSOUR & LONGTIN, 1997)
para lidar com os estados defasados durante a integração numérica. Em todas as
simulações realizadas os sinais obtidos possuem
,
sendo
e
pontos, passo de integração
,
e
condições
iniciais:
.
A partir de agora passa-se a discutir simulações numéricas associadas a
diferentes comportamentos do coração. Consideram-se três situações distintas que
possuam ECGs representativos de comportamentos normais e patológicos: normal;
flutter ventricular; e fibrilação ventricular. Os dois últimos são patologias comuns sendo
a fibrilação ventricular um comportamento irregular, caótico, potencialmente perigoso.
Cada uma das simulações está relacionada a um conjunto de parâmetros ajustados de
forma artesanal, utilizando como referência os valores propostos por Grudzinski &
Zebrowski (2004), Santos et al. (2004) e Gois & Savi (2009). Sendo assim, adotam-se
os parâmetros relacionados na Tabela 3.1.
28
Tabela 3.1: Parâmetros para simulação dos ECGs.
Variáveis
ECG
Normal
Flutter
Fibrilação
Ventricular Ventricular
1o oscilador:
3
1
-1,9
1,9
0,55
3
1
-1,9
1,9
0,55
0,5
0,97
-1
3
6
3
0,5
-0,5
4
0,67
3
0,1
-0,1
4
1,5
3
0,5
-0,5
4
0,67
2o oscilador:
3o oscilador:
7
7
7
1,65
1,65
1,65
-2
-2
-2
7
7
7
0,67
1,5
0,67
Amplitudes e frequências dos forçamentos externos:
0
0
2,5
0
0
5
0
0
20
0
0
1,9
0
0
1,9
0
0
1,9
Acoplamentos:
3
0
3
0
0
0
0
0
0
55
30
55
0
0
0
0
0
0
Defasagens:
0,8
0,8
0,8
0
0
0
0
0
0
0,1
0,1
0,1
0
0
0
0
0
0
IMPORTANTE:
Em todas as simulações utilizam-se:
,
,
,
,
,
e
.
29
Além disso, cabe mencionar que o ECG padrão é composto por doze derivações
separadas, seis periféricas e seis precordiais (DUBIN, 1996). As derivações são, na
realidade, posições/ângulos diferentes para se registrar a mesma atividade cardíaca.
Neste trabalho, opta-se por utilizar os sinais da segunda derivação. A escolha da
segunda derivação é baseada no fato desta ser umas das derivações mais características
no estabelecimento de diversos diagnósticos, portanto, bastante representativa da
atividade elétrica do coração (GOIS & SAVI, 2009).
A dinâmica de cada comportamento é ilustrada através de curvas como o ECG, o
espaço de fase e a seção de Poincaré. Os expoentes de Lyapunov também são estimados
com o objetivo de caracterizar a resposta do sistema.
Para realizar o cálculo do expoente de Lyapunov utiliza-se o algoritmo proposto
por Wolf et al. (1985). Quando o sistema dinâmico possui um modelo matemático
estabelecido que permite a linearização em torno de uma determinada trajetória, este
algoritmo calcula os expoentes com precisão (SAVI, 2005, 2006). Além disso, é
importante mencionar que para caracterizar o processo dinâmico como caótico ou
periódico é suficiente conhecer apenas o maior dos expoentes de Lyapunov, pois desta
forma, é possível saber se trajetórias vizinhas divergem (SAVI, 2006). Se
processo é caótico; se
o processo é quasi-periódico; e se
,o
o processo
é periódico.
O modelo matemático apresenta defasagens temporais, sendo necessário um
tratamento especial para lidar com elas. Aqui utiliza-se a expansão em série de Taylor
que faz com que o sistema passe a ter infinitas dimensões, apresentando infinitos
expoentes de Lyapunov. Para solucionar este problema, as DDEs são aproximadas por
um conjunto de EDOs, como proposto por Sprott (2007) e apresentado na Equação
(2.8).
3.2.1.1 ECG normal
Embora o modelo conceitual geral apresente acoplamentos bidirecionais, o
funcionamento normal de um coração apresenta um acoplamento unidirecional do
nódulo SA para o nódulo AV e do nódulo AV para o feixe de His-Purkinje. Isso faz
com que o modelo conceitual do ECG normal seja apresentado como ilustrado na
Figura 3.7. Analisando os dados da Tabela 3.1 observa-se que os parâmetros associados
aos acoplamentos bidirecionais são nulos de forma a eliminar essas conexões.
30
Figura 3.7: Modelo conceitual do ECG normal.
Na Figura 3.8 é apresentada a comparação entre o ECG normal obtido utilizando
o modelo matemático proposto (em rosa) e o ECG normal experimental (em preto
tracejado). O ECG experimental foi obtido no banco de dados “Physionet”
(www.physionet.org/physiobank/database/#ecg). Verifica-se que o ECG numérico
captura o comportamento de um coração humano sadio, apresentando boa concordância
com os dados reais. Além disso, analisando o detalhe apresentado na Figura 3.8,
observa-se que o ECG numérico apresenta as ondas mais importantes: onda P,
complexo QRS e onda T.
Figura 3.8: Comparação entre o ECG normal numérico e o experimental.
Nas Figuras 3.9 e 3.10 estão ilustrados, respectivamente, os espaços de fase e as
seções de Poincaré do ECG normal e das projeções bidimensionais do espaço de fase
hepta-dimensional, representando a dinâmica de cada oscilador cardíaco, nódulo SA,
AV e ao feixe de His-Purkinje. Observa-se que o sistema apresenta um comportamento
aparentemente regular.
31
(a)
(b)
(c)
(d)
Figura 3.9: Espaços de fase relacionados ao ECG normal: (a) ECG, (b) Nódulo SA, (c)
Nódulo AV e (d) Feixe de His-Purkinje.
(a)
(b)
(c)
(d)
Figura 3.10: Seções de Poincaré do ECG normal: (a) ECG, (b) Nódulo SA, (c) Nódulo
AV e (d) Feixe de His-Purkinje.
32
Na Figura 3.11 apresenta-se a história temporal dos expoentes de Lyapunov do
ECG normal. Os valores convergidos são:
.
Nota-se a existência de dois expoentes nulos e quatro expoentes negativos. Isso,
juntamente com o comportamento dinâmico avaliado nas seções de Poincaré, onde
observa-se a presença de uma trajetória fechada, Figura 3.10, caracterizam um
comportamento quasi-periódico.
Figura 3.11: Expoentes de Lyapunov do ECG normal.
A seguir são estudadas duas patologias cardíacas identificadas facilmente através
da análise do ECG: o flutter ventricular e a fibrilação ventricular.
3.2.1.2 ECG com flutter ventricular
O flutter ventricular é uma arritmia cardíaca produzida por um único foco
ventricular ectópico que descarrega o estímulo elétrico numa frequência rápida, entre
200 e 300 batimentos/minuto (DUBIN, 1996). Esta patologia é caracterizada
principalmente pela falta de funcionamento do nódulo SA (GOIS & SAVI, 2009).
Sendo assim, não há transmissão de sinal do nódulo SA para o nódulo AV, o que é
representado no modelo matemático pela eliminação do acoplamento entre o 1º e o 2º
osciladores. Isto também pode ser observado através do modelo conceitual desta
patologia, apresentado na Figura 3.12. Os parâmetros utilizados estão relacionados na
Tabela 3.1. Além disso, considera-se
.
33
Figura 3.12: Modelo conceitual do ECG com flutter ventricular.
Os ECGs, experimental e numérico, associados ao flutter ventricular são
apresentados na Figura 3.13. Observa-se que o ECG apresenta ondas senoidais regulares
com grandes oscilações e sem definição clara do complexo QRS e onda T, pois a
resposta dos ventrículos passa a ser diferente e, devido ao ritmo mais rápido do nódulo
AV, a frequência do sinal é mais alta. Analisando o ECG numérico observa-se que essas
características foram qualitativamente capturadas, apresentando características similares
ao ECG experimental. Quase invariavelmente o flutter ventricular evolui para a
fibrilação ventricular que é uma patologia bastante perigosa podendo levar a morte
(DUBIN, 1996).
Figura 3.13: ECG com flutter ventricular experimental
(ocw.tufts.edu/Content/50/lecturenotes/634401/634452) e numérico.
34
Nas Figuras 3.14 e 3.15 estão ilustrados os espaços de fase e as seções de
Poincaré do ECG relacionado ao flutter ventricular e a algumas projeções
bidimensionais, representando a dinâmica do nódulo AV e do feixe de His-Purkinje.
Observa-se que o sistema apresenta um comportamento aparentemente regular.
(a)
(b)
(c)
Figura 3.14: Espaços de fase do ECG com flutter ventricular: (a) ECG, (b) Nódulo AV e
(c) Feixe de His-Purkinje.
35
(a)
(b)
(c)
Figura 3.15: Seções de Poincaré relacionadas ao ECG com flutter ventricular: (a) ECG,
(b) Nódulo AV e (c) Feixe de His-Purkinje.
Para caracterizar o comportamento do ECG com flutter ventricular é realizado o
cálculo dos expoentes de Lyapunov. A Figura 3.16 apresenta os expoentes calculados
que possuem os seguintes valores convergidos:
. Os expoentes nulos
em conjunto com as seções de Poincaré associadas a esta patologia, Figura 3.15,
indicam um comportamento quasi-periódico.
Figura 3.16: Expoentes de Lyapunov do ECG com flutter ventricular.
36
3.2.1.3 ECG com fibrilação ventricular
A fibrilação ventricular é uma arritmia cardíaca grave, produzida por numerosos
focos ectópicos localizados em vários pontos dos ventrículos, cada um disparando com
uma determinada frequência. Como eles disparam ao mesmo tempo, cada um
descarrega somente uma pequena área, resultando numa contração ventricular caótica e
irregular (DUBIN, 1996). Na fibrilação ventricular, pequenas seções do músculo
cardíaco se contraem de maneira desordenada e muito rápida, tornando o ritmo do
coração frenético e irregular (KAPLAN & COHEN, 1990; WITKOWSKI et al., 1995).
Não havendo sincronicidade na contração das fibras musculares cardíacas dos
ventrículos, não existe uma contração efetiva. Como o sangue não é bombeado para
fora, esta patologia acarreta uma consequente parada cardiorrespiratória e circulatória.
Este círculo vicioso, se não revertido por tratamento imediato, leva a morte.
Figura 3.17: Modelo conceitual do ECG com fibrilação ventricular.
Para descrever a fibrilação ventricular, considera-se o modelo conceitual
utilizado para reproduzir o comportamento do ECG normal, incluindo forçamentos
externos responsáveis por excitar o sistema representando o estímulo dos focos
ectópicos que causam esta patologia. A Figura 3.17 mostra o modelo conceitual para o
sistema cardíaco com fibrilação ventricular.
A fibrilação ventricular é uma situação patológica facilmente reconhecida
através do ECG pelo aspecto totalmente irregular, de amplitude variada e ondas
grosseiras do seu traçado. Observando os ECGs de pacientes com fibrilação ventricular,
Figura 3.18, nota-se que não é possível determinar um padrão ou regularidade nesta
37
patologia e que ela se apresenta de forma diferente em cada situação. Além disso, não é
possível identificar nenhuma das ondas características do batimento cardíaco normal:
onda P, complexo QRS e onda T. Sendo assim, pode-se dizer que a fibrilação
ventricular é uma patologia irregular e caótica, facilmente reconhecida por esse aspecto
(DUBIN, 1996).
(www. geicpe-tripod-com)
(users.matrix.com.br/grace/fv.html)
(www.nigeriandoctor.com)
(www.ecg.med.br)
Figura 3.18: ECGs experimentais de pacientes com fibrilação ventricular.
Na Figura 3.19 é apresentado o ECG associado à fibrilação ventricular obtido
através da simulação numérica utilizando o modelo matemático proposto e os
parâmetros relacionados na Tabela 3.1. Verifica-se um padrão irregular que descreve de
forma qualitativa as características observadas no traçado dos ECGs experimentais.
38
Figura 3.19: ECG numérico com fibrilação ventricular.
(a)
(b)
(c)
(d)
Figura 3.20: Espaços de fase relacionados ao ECG com fibrilação ventricular: (a) ECG,
(b) Nódulo SA, (c) Nódulo AV e (d) Feixe de His-Purkinje.
Os espaços de fase e as seções de Poincaré estão apresentadas nas Figuras 3.20 e
3.21. Apresentam-se o ECG com fibrilação ventricular e as projeções bidimensionais
associadas à dinâmica do nódulo SA, nódulo AV e feixe de His-Purkinje. Note que o
sistema apresenta uma resposta com uma estrutura aparentemente caótica.
39
(a)
(b)
(c)
(d)
Figura 3.21: Seções de Poincaré do ECG com fibrilação ventricular: (a) ECG, (b)
Nódulo SA, (c) Nódulo AV e (d) Feixe de His-Purkinje.
A presença de comportamentos não lineares e respostas caóticas relacionadas à
fibrilação ventricular são confirmadas em alguns estudos realizados nos últimos anos
(GARFINKEL et al., 1992, 1995; GOIS & SAVI, 2009; LÓPES et al., 2010;
WITKOWSKI et al., 1995). O cálculo dos expoentes de Lyapunov pode confirmar a
caoticidade do ECG fibrilado. A Figura 3.22 mostra que a evolução dos expoentes
converge para os seguintes valores:
.
Nota-se a presença de dois expoentes positivos e quatro negativos, o que caracteriza e
confirma a natureza caótica desta patologia.
40
Figura 3.22: Expoentes de Lyapunov do ECG com fibrilação ventricular.
41
4
CONTROLE DE CAOS APLICADO A UM MARCA-PASSO
NATURAL CARDÍACO
Neste capítulo o método de controle de caos ETDF é aplicado ao marca-passo
natural cardíaco. A ideia central é avaliar a capacidade deste método em evitar respostas
patológicas caóticas, estabilizando o sistema em uma de suas OPIs ou mesmo
suprimindo o caos.
4.1
Simulações numéricas
O fato de algumas respostas caóticas em sistemas cardíacos estarem associadas a
funcionamentos patológicos (ATTARSHARGHI et al., 2009; CHRISTINI et al., 2001;
DUBLJEVIC et al., 2008; FERREIRA et. al., 2011; GARFINKEL et. al., 1992, 1995;
GLASS et al., 1983, 1987; GOIS & SAVI; 2009; HALL et al., 1997; KARMA &
GILMOUR JR, 2007; LÓPEZ et al., 2010; SAVI, 2005) é muito importante porque isso
possibilita o surgimento de novas formas de diagnosticar e tratar doenças
cardiovasculares.
Para analisar o desempenho do método ETDF quando aplicado em um marcapasso natural cardíaco considera-se a lei de controle associada ao modelo proposto por
Grudzinski & Zebrowski (2004), conforme apresentado na Equação (4.1),
(4.1)
onde
representa a perturbação de controle.
Na primeira etapa da estratégia de controle, identificam-se as OPIs imersas no
atrator caótico do sistema. Neste trabalho, essa identificação é feita utilizando o método
dos pontos recorrentes próximos (AUERBACH et al., 1987). Este método é
implementado na seção de Poincaré obtida a partir da série temporal relacionada à
atividade caótica do marca-passo natural cardíaco,
ilustrado na Figura 3.4, onde
é a ordem da amostra e
42
,
é o
intervalo entre duas amostras do sinal, sendo adotado
igual ao passo de integração,
. Como sistema é excitado harmonicamente, a seção de Poincaré representa uma
amostra estroboscópica do sinal. A busca considera órbitas até a periodicidade 10.
Depois da identificação, o expoente de Lyapunov máximo de cada OPI de
interesse é calculado para diferentes valores dos parâmetros de controle,
e
.
Entretanto, por causa da inserção da lei de controle do ETDF, o sistema passa a ser
composto por DDEs. Sendo assim, para realizar o cálculo dos expoentes de Lyapunov é
necessário utilizar uma representação alternativa do sistema com a qual são eliminadas
as dependências de estados defasados no tempo, conforme apresentado a seguir.
4.1.1
Representação do sistema proposto para o cálculo dos expoentes
de Lyapunov
Para calcular o expoente de Lyapunov do modelo apresentado na Equação (4.1),
é proposta a representação alternativa mostrada na Equação (4.2). Com isso, o sistema
original com controlador é reescrito como um conjunto de
forma, assumindo-se
aproximação de
,
e considerando-se as variáveis
no intervalo
EDOs. Desta
para a
, o conjunto de equações que governam
o sistema dinâmico é dado por:
, para 2
(4.2)
onde
e
é o passo de integração. Desta forma, o conjunto de EDOs de
primeira ordem dado pela Equação (4.2) pode ser integrado numericamente utilizando o
método de Runge-Kutta de quarta ordem e o maior expoente de Lyapunov é calculado a
partir de um algoritmo proposto por Wolf et al. (1985). É importante ressaltar que a
trajetória da OPI associada ao sistema original
43
é substituída pela série temporal
da órbita, obtida na identificação da mesma (DE PAULA & SAVI, 2009 a; FERREIRA
et. al., 2011).
Sendo assim, a estabilização da órbita escolhida pode ser alcançada para
parâmetros relacionados a valores negativos do expoente. Além disso, a escolha dos
valores dos parâmetros deve ser realizada de forma que o expoente de Lyapunov
máximo esteja próximo do seu valor mínimo, o que segundo Pyragas (1995) fornece
uma taxa de convergência maior das órbitas próximas para a OPI de interesse. Na
segunda etapa, o sistema é perturbado a fim de alcançar sua estabilização. Os resultados
obtidos na segunda etapa são mostrados a seguir.
4.1.2
Controle de caos
Iniciando a análise do emprego do método de controle escolhe-se uma OPI de
período-2. A Figura 4.1 mostra a órbita identificada e os expoentes de Lyapunov
máximos calculados para diferentes valores dos parâmetros de controle,
e . Regiões
associadas a valores negativos do expoente de Lyapunov máximo indicam que a
estabilização do sistema pode ser alcançada para qualquer valor de
, considerando-se valores adequados de
(a)
, inclusive para
.
(b)
Figura 4.1: (a) OPI de período-2 identificada e (b) expoentes de Lyapunov máximos.
A Figura 4.2 mostra o espaço de fase e a resposta do sistema no tempo em
regime permanente e a perturbação imposta pelo controlador utilizando
. Além disso, considera-se
e
, correspondente à periodicidade 2, e
44
. Verifica-se que o controlador é capaz de estabilizar
a OPI e, conseqüentemente, retirar o sistema de um comportamento caótico indesejado
através de pequenas perturbações.
(a)
(b)
(c)
Figura 4.2: OPI de período-2 estabilizada, utilizando
e
: (a) Espaço de
fase em regime permanente; (b) Resposta no tempo; (c) Perturbação no tempo.
Em seguida, analisa-se uma OPI de período-4. Na Figura 4.3 estão ilustrados a
órbita identificada e os expoentes de Lyapunov máximos considerando-se
, correspondente à periodicidade 4. Verifica-se que a estabilização da órbita
pode ser obtida para uma faixa de valores de , quando
45
,
e
.
3
(a)
(b)
Figura 4.3: (a) OPI de período-4 identificada e (b) expoentes de Lyapunov máximos.
(a)
(b)
Figura 4.4: (a) Bacia de atração considerando
e
; (b) Estado do sistema
no momento em que a ação de controle é iniciada.
Para a estabilização da OPI de período-4 adota-se
e
. Entretanto,
analisando o desempenho do método de controle nota-se que, de acordo com as condições
iniciais, o controlador pode levar a trajetória do sistema a diferentes comportamentos. A
Figura 4.4 (a) apresenta a bacia de atração do sistema com o controlador, utilizando os
parâmetros de controle em questão. Verifica-se que, de acordo com as condições iniciais, o
sistema pode convergir para um atrator periódico de período-1 (pontos pretos), pode
estabilizar a OPI de período-4 (pontos azuis) ou pode apresentar um comportamento caótico
(pontos rosa). A Figura 4.4 (b) apresenta o estado do sistema no momento em que se inicia
a ação de controle, em
, juntamente com os pontos fixos da OPI de período-4
(pontos verdes). Novamente, os pontos em preto, azul e rosa indicam, respectivamente, a
46
convergência para a órbita de período-1, a estabilização da OPI de período-4 e um
comportamento caótico, em regime permanente. Mais ainda, verifica-se que quando o
sistema está na vizinhança da OPI de interesse ao se iniciar a ação de controle, a chance de
se estabilizar a órbita é maior.
Seguindo a análise do sistema com ação de controle considerando
,
utiliza-se
e
e
,
correspondente à periodicidade 4. Na Figura 4.5 estão ilustradas a órbita estabilizada, a
resposta no tempo em regime permanente e a perturbação imposta. Observa-se que foi
possível estabilizar a OPI, aplicando pequenas perturbações ao sistema.
(a)
(b)
(c)
Figura 4.5: OPI de período-4 estabilizada, considerando
,
e
: (a) Espaço de fase em regime permanente;
(b) Resposta no tempo; (c) Perturbação no tempo.
47
Em seguida, alteram-se as condições iniciais para
e considera-se, novamente,
. A Figura 4.6 apresenta a
órbita de período-1 encontrada, a resposta no tempo em regime permanente e a
perturbação aplicada ao sistema. Verifica-se que, utilizando essa condição inicial, o
sistema converge para o atrator periódico apresentado na Figura 3.5. Desta forma, o
comportamento obtido não consiste na estabilização de uma OPI do sistema, na
realidade, a perturbação realizada transfere a trajetória do sistema do atrator caótico
para o periódico.
(a)
(b)
(c)
Figura 4.6: Órbita de período-1 encontrada, considerando
,
e
: (a) Espaço de fase; (b) Resposta no tempo em
regime permanente; (c) Perturbação no tempo.
Novamente modificam-se as condições iniciais, agora para
e mantém-se
. Na Figura 4.7 estão ilustrados o espaço de
48
fase, a resposta no tempo e a perturbação imposta ao sistema. Verifica-se que, com
essas condições iniciais, o controlador não se mostrou eficaz na estabilização do
sistema, apresentando um comportamento caótico.
(a)
(b)
(c)
Figura 4.7: Comportamento caótico encontrado, considerando
,
e
: (a) Espaço de fase; (b) Resposta no tempo; (c)
Perturbação no tempo.
Analisando as Figuras 4.5 a 4.7 pode-se dizer que o sistema contendo a lei de
controle e utilizando os parâmetros do controlador
e
possui 3 atratores
coexistentes, sendo dois periódicos e um caótico.
Entretanto, observa-se que também é possível estabilizar a OPI de período-4
mantendo as condições iniciais com as quais na primeira análise não foi possível
estabilizar o sistema,
, utilizando
e
modificando os parâmetros do controlador. Sendo assim, adotam-se os parâmetros de
49
controle
e
. Na Figura 4.8 estão ilustradas a órbita estabilizada, a resposta
no tempo em regime permanente e a perturbação imposta ao sistema.
(a)
(b)
(c)
Figura 4.8: OPI de período-4 estabilizada, considerando
,
e
: (a) Espaço de fase em regime permanente; (b)
Resposta no tempo; (c) Perturbação no tempo.
(a)
(b)
Figura 4.9: (a) OPI de período-10 e (b) expoentes de Lyapunov máximos.
50
A fim de verificar a eficácia do método de controle ETDF em estabilizar órbitas
de alta periodicidade analisou-se a OPI de período-10. Nesse contexto, considera-se
,
correspondente
à
periodicidade
10,
e
. A Figura 4.9 ilustra a OPI de período-10
identificada e os expoentes de Lyapunov máximos. Verifica-se que não existem
expoentes negativos, sendo assim não é possível estabilizar a órbita através o método de
controle utilizado.
Os resultados mostram que o método é eficaz na estabilização de OPIs de baixa
periodicidade. No entanto, nota-se uma dependência das condições iniciais,
determinante para a estabilização da órbita. Verifica-se que, de acordo com as condições
iniciais, o sistema pode ser estabilizado em uma OPI de interesse ou apresentar
comportamentos diferentes. Além disso, é importante mencionar que quando a ação de
controle se inicia na vizinhança da OPI de interesse, há uma maior chance de
estabilização desta órbita. Entretanto, a estabilização de órbitas de elevada periodicidade
não pode ser alcançada utilizando o método ETDF.
4.1.3
Supressão de caos
Uma alternativa para evitar o comportamento caótico é a supressão do caos. Esse
procedimento foge da ideia central do controle de caos de utilizar pequenas
perturbações para estabilizar OPIs que pertencem à dinâmica do sistema. No entanto, no
caso dos ritmos cardíacos pode ser utilizado para suprimir o comportamento caótico em
uma situação de emergência.
(a)
(b)
Figura 4.10: (a) Órbita de período-2 encontrada, utilizando
perturbação no tempo.
51
e
, e (b) a
Nesse contexto, De Paula & Savi (2009 b) mostram que o aumento do esforço do
controlador, representado pelos parâmetros de controle, pode suprimir o comportamento
caótico. Sendo assim, opta-se por utilizar
e
. Na Figura 4.10 estão
ilustradas a órbita de período-2 encontrada e a perturbação imposta ao sistema.
Em seguida, utiliza-se
e
. Na Figura 4.11 estão ilustradas a
órbita de período-1 encontrada e a perturbação aplicada ao sistema.
(a)
(b)
Figura 4.11: (a) Órbita de período-1 encontrada, utilizando
e
, e (b) a
perturbação no tempo.
Para os dois conjuntos de parâmetros utilizados é possível suprimir o
comportamento caótico utilizando valores elevados dos parâmetros de controle. Neste
caso, o comportamento obtido não consiste em uma órbita natural do sistema e as
perturbações não são pequenas. Entretanto, mesmo fugindo da ideia central da estratégia
de controle, verifica-se que a supressão é uma alternativa importante, pois elimina o
risco iminente de morte em situações emergenciais críticas.
Finalmente, pode-se concluir que, para o sistema analisado, tanto a estabilização
de OPIs quanto a supressão do caos são eficazes, pois eliminam respostas
patologicamente indesejadas de um dos marca-passos cardíacos.
52
5
CONTROLE DE CAOS DO SISTEMA CARDÍACO
No Capítulo 3 comprova-se que a fibrilação ventricular apresenta um
comportamento caótico. Estudos relacionados com esta patologia são essenciais porque
ela é uma arritmia cardíaca grave que, se não for tratada rapidamente, torna-se letal ao
organismo humano. Sendo assim, neste capítulo avalia-se a eficácia do método de
controle de caos ETDF em controlar, suprimir ou minimizar os efeitos das respostas
caóticas nos ritmos cardíacos associadas à fibrilação ventricular. Com isso, torna-se
possível simular a inserção desta técnica de controle de caos em um marca-passo ou
microdesfibrilador. O modelo utilizado agora considera três osciladores acoplados,
sendo capaz de descrever os sinais do ECGs.
Para isso, a lei de controle é incorporada ao modelo matemático do sistema
cardíaco, apresentado na Equação (3.3). Considera-se que o controle é aplicado no
marca-passo natural, o nódulo SA. Inicialmente, para determinação dos parâmetros do
controlador, analisa-se a dinâmica desse sistema desacoplado dos demais. A partir daí, o
sinal controlado é utilizado com um sinal de entrada para os outros nódulos.
Depois dessa análise, passa-se a tratar todo o sistema acoplado. Com isso, os
parâmetros do controlador são obtidos através do sistema com três osciladores
acoplados.
5.1
Controle de caos utilizando uma análise desacoplada
Primeiramente é realizada uma análise desacoplada do controle de caos do
sistema cardíaco. Para isso, é resgatado o estudo do controle de um marca passo natural,
realizado no Capítulo 4. A ideia é utilizar o sinal controlado como um marca-passo,
sendo um sinal de entrada para os outros sistemas, segundo e terceiro osciladores.
Sendo assim, considera-se o sistema de controle associado ao modelo dos ritmos
cardíacos. Nessas condições, a dinâmica do sistema é governada pelo seguinte conjunto
de equações:
53
(5.1)
onde
e
são conhecidos, consistindo nos sinais controlados do marca-passo natural,
previamente obtidos no Capítulo 4. Com isso, simula-se a inserção do sinal de controle
no primeiro oscilador, associado ao nódulo SA.
Nas simulações são empregados os parâmetros de controle,
e , calculados e
analisados no Capítulo 4, com os quais é possível controlar os sinais caóticos de um
marca-passo
natural
cardíaco.
Utilizam-se
as
seguintes
condições
iniciais
.
Os mesmos casos tratados anteriormente, no controle do marca-passo natural,
são utilizados aqui. Inicia-se a análise, avaliando o controlador com
e
,
anteriormente aplicados para estabilizar a OPI de período-2. Na Figura 5.1 estão
ilustrados o ECG com fibrilação ventricular (em preto tracejado) e o ECG controlado
(em rosa).
Figura 5.1: ECG com fibrilação ventricular (em preto tracejado) e do ECG com controle
(em rosa), utilizando a abordagem desacoplada, com
54
e
.
Na Figura 5.2 são apresentados os espaços de fase do ECG com fibrilação
ventricular (em preto) e do ECG controlado (em rosa) e algumas projeções
bidimensionais representando a dinâmica do nódulo SA, nódulo AV e feixe de HisPurkinje. Após a inserção do sinal controlado, o nódulo AV, o feixe de His-Purkinje e o
ECG com fibrilação ventricular passam a apresentar uma dinâmica com um padrão de
comportamento que tende a ser menos crítico.
(a)
(b)
(c)
(d)
Figura 5.2: Espaços de fase do ECG com fibrilação ventricular (em preto) e do ECG
com controle (em rosa), utilizando a abordagem desacoplada, com
e
: (a)
ECG, (b) Nódulo SA, (c) Nódulo AV e (d) Feixe de His-Purkinje.
Em seguida, considera-se a estabilização de uma órbita de período-4, onde
utilizam-se os parâmetros de controle
e
. Na Figura 5.3 são mostrados o
ECG com fibrilação ventricular (em preto tracejado) e o ECG controlado (em rosa). A
Figura 5.4 apresenta os espaços de fase do ECG com fibrilação ventricular (em preto) e
55
do ECG controlado (em rosa). Além disso, na Figura 5.4 também estão ilustradas as
projeções bidimensionais que representam a dinâmica do nódulo SA, nódulo AV e feixe
de His-Purkinje. Note que o controlador é capaz de levar o ECG com fibrilação
ventricular, o nódulo AV e o feixe de His-Purkinje a comportamentos dinâmicos com
padrões mais adequados e menos complexos.
Figura 5.3: ECG com fibrilação ventricular (em preto tracejado) e do ECG com controle
(em rosa), utilizando a abordagem desacoplada, com
e
(a)
(b)
(c)
(d)
.
Figura 5.4: Espaços de fase do ECG com fibrilação ventricular (em preto) e do ECG
com controle (em rosa) , utilizando a abordagem desacoplada, com
e
(a) ECG, (b) Nódulo SA, (c) Nódulo AV e (d) Feixe de His-Purkinje.
56
:
5.2
Controle de caos utilizando uma análise acoplada
Neste momento, realiza-se uma análise desempenho do controle de caos aplicado
ao sistema cardíaco que representa os ritmos cardíacos. Entretanto, as análises são
realizadas considerando o sistema acoplado. Como realizado na seção anterior, o
controlador atua no marca-passo natural, primeiro oscilador do modelo proposto. A
diferença para o caso anterior é que nesta seção os parâmetros de controlador são
determinados através do modelo acoplado, contendo os três osciladores, conforme
mostrado na Equação (5.2).
(5.2)
O processo de controle se inicia com a identificação das OPIs imersas na
dinâmica do sistema. Essa identificação é realizada utilizando o método dos pontos
recorrentes próximos (AUERBACH et al., 1987). Este método é empregado à seção de
Poincaré obtida através da série temporal relacionada ao funcionamento caótico do
coração, ilustrada na Figura 3.20. Além disso, utiliza-se
,
e
.
Investigam-se órbitas até a periodicidade 7.
57
Depois da identificação é realizado o cálculo dos expoentes de Lyapunov
máximos para cada OPI que se deseja estabilizar, considerando diferentes valores dos
parâmetros do controlador,
e . Inicia-se o estudo analisando a OPI de período-2. A
Figura 5.5 mostra a órbita identificada e as projeções bidimensionais associadas
representando a dinâmica do nódulo SA, do nódulo AV e do feixe de His-Purkinje. A
Figura 5.6 mostra os expoentes de Lyapunov máximos, considerando
,
correspondente à periodicidade 2. Analisando as regiões relacionadas aos valores
negativos dos expoentes de Lyapunov máximos, observa-se que é possível estabilizar o
sistema com qualquer valor de , considerando-se adequadamente os valores de .
(a)
(b)
(c)
Figura 5.5: OPI de período-2 identificada: (a) Nódulo SA, (b) Nódulo AV e (c) Feixe de
His-Purkinje.
58
Figura 5.6: OPI de período-2: Expoentes de Lyapunov máximos do sistema acoplado.
Verifica-se que há uma coerência entre o resultado obtido através do sistema
acoplado e a abordagem desacoplada utilizada na seção anterior, visto que através da
análise dos expoentes conclui-se que também é possível utilizar
e
para
estabilizar a OPI de período-2. Além disso, nota-se a similaridade entre os ECGs
controlados (em rosa) obtidos na análise atual, Figura 5.7, e anterior, Figura 5.1. Bem
como das seções de Poincaré e projeções bidimensionais associadas às dinâmicas do
nódulo SA, AV e feixe de His-Purkinje atuais, Figura 5.8, e anteriores, Figura 5.2. Além
disso, na Figura 5.9 é apresentada a perturbação imposta ao sistema. Observa-se que é
possível minimizar os efeitos da fibrilação ventricular no sistema cardíaco caótico
utilizando de pequenas perturbações.
Figura 5.7: ECG com fibrilação ventricular (em preto tracejado) e do ECG com controle
(em rosa), utilizando a abordagem acoplada, com
59
e
.
(a)
(b)
(c)
(d)
Figura 5.8: Espaços de fase do ECG com fibrilação ventricular (em preto) e do ECG
com controle (em rosa), utilizando a abordagem acoplada, com
e
: (a)
ECG, (b) Nódulo SA, (c) Nódulo AV e (d) Feixe de His-Purkinje.
Figura 5.9: Perturbação no tempo utilizada na estabilização da OPI de período-2 do
sistema cardíaco acoplado.
Em seguida, analisa-se a OPI de período-4. Na Figura 5.10 está ilustrada a órbita
identificada e as projeções bidimensionais representando a dinâmica do nódulo SA, do
60
nódulo AV e do feixe de His-Purkinje, e na Figura 5.11 são apresentados os expoentes
de Lyapunov máximos para diferentes parâmetros de controle, considerando
, associado à periodicidade 4.
(a)
(b)
(c)
Figura 5.10: OPI de período-4 identificada: (a) Nódulo SA, (b) Nódulo AV e (c) Feixe
de His-Purkinje.
Figura 5.11: OPI de período-4: Expoentes de Lyapunov máximos do sistema acoplado.
61
(a)
(b)
(c)
(d)
Figura 5.12: Espaços de fase do ECG com fibrilação ventricular (em preto) e do ECG
com controle (em rosa), utilizando a abordagem acoplada, com
e
,ea
ação de controle começando em
: (a) ECG, (b) Nódulo SA, (c) Nódulo AV e
(d) Feixe de His-Purkinje.
Analisando a Figura 5.11, observa-se que, escolhendo adequadamente os valores
de
, é possível estabilizar o sistema com qualquer valor de
estabilização da OPI de período-4 adota-se
e
. Sendo assim, para
. Na Figura 5.12 são
apresentados os espaços de fase do ECG com fibrilação ventricular (em preto) e do
ECG contendo a lei de controle (em rosa) e algumas projeções bidimensionais,
representando a dinâmica do nódulo SA, nódulo AV e feixe de His-Purkinje. Nota-se
que o método de controle não apresenta um bom desempenho.
Até o momento, em todas as simulações realizadas, a ação de controle se inicia
somente quando todos os estados defasados necessários do sistema são conhecidos, em
. Entretanto, conforme concluído através da análise da Figura 4.4 (b), quando o
sistema está na vizinhança da OPI de interesse ao se iniciar a ação de controle, há uma
chance maior de se estabilizar a órbita.
Na Figura 5.13 estão ilustrados o ECG com fibrilação ventricular (em preto
tracejado) e o ECG contendo a lei de controle (em rosa) e na Figura 5.14 são
62
apresentados os espaços de fase associados ao ECG com fibrilação ventricular (em
preto) e ao ECG controlado (em rosa) e algumas projeções bidimensionais. Entretanto,
para esses resultados é necessário um tempo de espera para que com controlador inicie
sua atuação sob o sistema. Sendo assim, o controlador espera, primeiramente, até que os
estados defasados necessários sejam conhecidos e, em seguida, até que o sistema esteja
na vizinhança da OPI de período-4. Depois disso a ação de controle se inicia.
Figura 5.13: ECG com fibrilação ventricular (em preto tracejado) e do ECG com
controle (em rosa), utilizando a abordagem acoplada, com
e
, e a ação de
controle começando na vizinha da OPI de interesse.
(a)
(b)
(c)
(d)
Figura 5.14: Espaços de fase do ECG com fibrilação ventricular (em preto) e do ECG
com controle (em rosa), utilizando a abordagem acoplada, com
e
,ea
ação de controle começando na vizinha da OPI de interesse: (a) ECG, (b) Nódulo SA,
(c) Nódulo AV e (d) Feixe de His-Purkinje.
63
Na Figura 5.15 é apresentada a perturbação imposta ao sistema. Nota-se que foi
possível estabilizar o sistema na OPI desejada utilizando, para isso, pequenas
perturbações. Além disso, observa-se que o controlador demora mais tempo para iniciar
a atuação. Isso ocorre por causa do tempo de espera. Além disso, verifica-se que
aplicando o método ETDF ao ECG com fibrilação ventricular é possível levar o sistema
para um comportamento dinâmico mais suave.
Figura 5.15: Perturbação no tempo utilizada na estabilização da OPI de período-4 do
sistema acoplado.
(a)
(b)
(c)
Figura 5.16: OPI de período-7 identificada: (a) Nódulo SA, (b) Nódulo AV e (c) Feixe
de His-Purkinje.
64
Para avaliar a eficácia do método de controle ETDF em estabilizar órbitas de alta
periodicidade analisa-se a OPI de período-7. Na Figura 5.16 é apresentada a órbita
identificada e as projeções bidimensionais representando a dinâmica do nódulo SA,
nódulo AV de do feixe de His-Purkinje. Além disso, na Figura 5.17 estão ilustrados os
expoentes de Lyapunov máximos, considerando
, correspondente à
periodicidade 7. Nota-se que não há expoentes negativos, não sendo possível estabilizar
esta órbita através do método de controle utilizado.
Figura 5.17: OPI de período-7: Expoentes de Lyapunov máximos do sistema acoplado.
Entretanto, os resultados mostram que o método ETDF apresenta um bom
desempenho na estabilização das OPIs de baixa periodicidade associadas ao sistema
cardíaco caótico, mais especificamente do ECG com fibrilação ventricular. No entanto,
nota-se que os ECGs controlados e a dinâmica do sistema observada através dos
espaços de fase são a mesma quando utiliza-se a abordagem desacoplada e acoplada.
Sendo assim, conclui-se que análise do sistema de forma acoplada não é interessante
porque demanda um maior tempo computacional na determinação dos parâmetros de
controle.
Neste momento vale destacar que os ECGs obtidos quando o sistema é
controlado possuem a característica da patologia conhecida como bloqueio de ramo,
mais especificamente do feixe de His, também conhecido como bloqueio de ramo do
feixe. Nas Figuras 5.3 e 5.13, onde é estabilizada a OPI de período-4, observam-se
algumas características do flutter auricular.
65
Os bloqueios são distúrbios na condução elétrica do coração que detêm a
passagem dos estímulos, podendo ocorrer em três regiões, no nódulo SA, no nódulo AV
ou no feixe de His e seus ramos. O bloqueio de ramo do feixe é ocasionado pelo
bloqueio do impulso dos ramos direito ou esquerdo do feixe de His (DUBIN, 1996). No
funcionamento cardíaco normal os ventrículos se despolarizam simultaneamente, já no
bloqueio de ramo do feixe há um retardamento do impulso no lado correspondente a
ocorrência do distúrbio (DUBIN, 1996). Sendo assim, um ventrículo se despolariza
pouco depois do outro, fazendo com que dois complexos QRS se juntem, conforme
apresentado na Figura 5.18. Isso faz com que o complexo QRS aparente estar alargado.
Figura 5.18: Esquema do bloqueio de ramo do feixe de His (DUBIN, 1996).
O flutter auricular, por sua vez, é uma arritmia cardíaca produzida pela presença
de outro foco auricular ectópico, além do nódulo SA, disparando com frequência de 250
a 350 batimentos/minuto (DUBIN, 1996). Conforme observa-se na Figura 5.19, o ECG
desta patologia se caracteriza por uma série de ondas P iguais, em sucessão rápida, se
assemelhando aos dentes de uma serra. Essa característica também pode ser verificada
nos comportamentos cardíacos obtidos quando é estabilizada a OPI de período-4,
conforme nota-se nas Figuras 5.3 e 5.13.
Figura 5.19: ECG com flutter auricular
(http://hugoveiga.atspace.com/Flutter_Auricular.htm).
66
Sendo assim, observa-se que os ECGs controlados possuem as características
presentes tanto no bloqueio de ramo quanto no flutter auricular. Isso é muito
interessante porque quando o paciente apresenta uma dessas duas patologias, o
tratamento é bem mais brando do que o tratamento da fibrilação ventricular. Desta
forma, pode-se dizer que a aplicação do controle de caos é eficiente no sentido de tornar
a dinâmica bem mais tolerável para o paciente.
Além disso, através da análise realizada no Capítulo 4 e do resultado do
expoente de Lyapunov máximo da OPI de período-7 conclui-se que o método de
controle ETDF não se mostra eficaz na estabilização de órbitas de alta periodicidade.
Neste caso, uma alternativa é a utilização da supressão de caos. Os resultados da
aplicação dessa estratégia alternativa são apresentados a seguir.
5.2.1
Supressão de caos
Na supressão de caos utilizam-se grandes perturbações, com as quais o sistema é
estabilizado em uma órbita que não é natural, aumentando-se o esforço de controle.
Nesse sentido, na tentativa de estabilizar a OPI de período-7 utiliza-se, primeiramente,
e
. Na Figura 5.20 estão ilustrados os espaços de fase relacionados ao
ECG com fibrilação ventricular (em preto) e ao ECG suprimido em uma órbita de
período-1 (em rosa). Além das projeções bidimensionais da dinâmica do sistema. Já na
Figura 5.21 é apresentada a perturbação imposta ao sistema.
67
(a)
(b)
(c)
(d)
Figura 5.20: Espaços de fase do ECG com fibrilação ventricular (em preto) e do ECG
com controle (em rosa), utilizando
e
: (a) ECG, (b) Nódulo SA, (c)
Nódulo AV e (d) Feixe de His-Purkinje.
Figura 5.21: Perturbação no tempo utilizada para suprimir o sistema em uma órbita de
período-1.
68
Em seguida adota-se
e
. Na Figura 5.22 estão ilustrados os
espaços de fase associados ao ECG com fibrilação ventricular (em preto) e ao ECG
suprimido em uma órbita de período-2 (em rosa), juntamente com as projeções
bidirecionais que representam a dinâmica do nódulo SA, do nódulo AV e do feixe de
His-Purkinje. Já na Figura 5.23 é apresentada a perturbação aplicada ao sistema.
(a)
(b)
(c)
(d)
Figura 5.22: Espaços de fase do ECG com fibrilação ventricular (em preto) e do ECG
com controle (em rosa), utilizando
e
: (a) ECG, (b) Nódulo SA, (c)
Nódulo AV e (d) Feixe de His-Purkinje.
Figura 5.23: Perturbação no tempo utilizada para suprimir o sistema em uma órbita de
período-2.
69
Verifica-se que utilizando os dois conjuntos de parâmetros de controle propostos
é possível suprimir o comportamento caótico presente no ECG com fibrilação
ventricular. Entretanto, analisando as Figura 5.20 a Figura 5.23 nota-se que as órbitas
encontradas não são órbitas naturais do sistema e que são utilizadas grandes
perturbações. Sendo assim, mesmo fugindo da ideia central do método de controle
ETDF, conclui-se que a supressão de caos é uma opção em situações emergenciais e
que leva o ECG com fibrilação ventricular a comportamentos mais suaves.
70
6
CONCLUSÕES
Neste trabalho é realizada uma análise da capacidade do método de controle por
realimentação
com
estados
defasados
estendidos
(ETDF)
em
estabilizar
comportamentos cardíacos caóticos, patológicos, mais especificamente, a fibrilação
ventricular. Sendo contribuição inédita na literatura a utilização do método ETDF com
esta finalidade.
Inicialmente, é realizada uma revisão bibliográfica que revela a importância do
estudo do funcionamento cardíaco e do controle de caos como uma nova estratégia
terapêutica para controlar, suprimir ou minimizar respostas caóticas indesejadas do
coração. Nota-se também que vários estudos realizados confirmam a natureza não linear
e caótica de algumas arritmias cardíacas. Dentre elas, a que possui maior potencial para
aplicação terapêutica das técnicas de controle de caos é a fibrilação ventricular.
Primeiramente realiza-se o estudo do comportamento de um marca-passo natural
cardíaco modelado através de uma equação de Van der Pol modificada. Então,
simulações numéricas são realizadas, reproduzindo dois tipos de comportamentos,
normal e patológico, associados respectivamente à resposta periódica e caótica de um
dos marca-passos naturais do coração, o nódulo SA ou o nódulo AV.
Em seguida, são reproduzidos alguns funcionamentos cardíacos utilizando um
modelo matemático onde são considerados três osciladores de Van der Pol modificados
conectados por acoplamentos com defasagem no tempo. Simulações são realizadas e
mostram que o modelo proposto é capaz de capturar de forma qualitativa o
comportamento geral de alguns ritmos cardíacos. Nestas simulações são reproduzidos o
ECG normal e o ECG de duas patologias, o flutter ventricular e a fibrilação ventricular.
Além disso, é realizado um estudo da dinâmica dos sinais obtidos.
O próximo passo é a aplicação da técnica de controle ETDF aos sistemas
propostos em regime caótico e avaliação da sua capacidade de estabilização.
Primeiramente, esta estratégia de controle é aplicada a um marca-passo natural se
mostrando eficaz tanto na estabilização das OPIs quanto na supressão do
comportamento caótico, eliminando respostas patologicamente indesejadas.
71
Por fim, o método de controle é aplicado ao ECG com fibrilação ventricular,
utilizando uma análise do sistema cardíaco, desacoplada e acoplada. A lei de controle é
incorporada às equações associadas ao primeiro oscilador do modelo que representam
fisiologicamente o nódulo SA. Dessa forma, simula-se a incorporação da técnica de
controle ETDF a um marca-passo ou microdesfibrilador atuando na aurícula direita. As
análises mostram que esta estratégia de controle de caos é eficaz no controle quando o
sistema é analisado de forma acoplada e desacoplada, minimizando os efeitos da
fibrilação ventricular e levando o sistema a comportamentos mais adequados e menos
críticos. Entretanto, nota-se que para as duas abordagens são obtidos resultados
semelhantes para as OPIs analisadas. Sendo assim, conclui-se que é mais interessante a
utilização da abordagem desacoplada porque o tempo utilizado na determinação dos
parâmetros de controle é menor.
Os comportamentos cardíacos obtidos após atuação do controlador apresentam
características que estão presentes em duas patologias, o bloqueio de ramo do feixe de
His e o flutter auricular. O tratamento dessas duas patologias é bem mais brando do que
o da fibrilação ventricular. Sendo assim, conclui-se que embora o controlador não leve o
ECG com fibrilação ventricular a um comportamento normal, com ele é possível levar o
ECG caótico a comportamentos cardíacos bem menos complexos. Desta forma, é
possível associar mais de um tratamento para levar o paciente a apresentar um ECG
normal.
Um fato que não pode deixar de ser mencionado é que o método de controle de
caos ETDF também não se mostra eficaz na estabilização de OPIs de alta periodicidade
associadas a respostas cardíacas caóticas. Nessas situações, contudo, o método continua
sendo útil para promover a supressão do caos o que representa uma solução emergencial
em situações críticas.
De uma maneira geral, entende-se que a abordagem dinâmica proporciona uma
compreensão adequada do comportamento dos ritmos cardíacos, sendo útil na
identificação, monitoração e controle do sistema cardiovascular.
6.1
Trabalhos futuros
Pyragas (2001) propôs um controlador baseado no método de controle ETDF
com o qual é possível eliminar totalmente todas as limitações desse método. Sendo
assim, como sugestão para continuação deste trabalho propõe-se a aplicação desse
72
controlador a fim de contornar a dificuldade do método ETDF em estabilizar órbitas alta
periodicidade.
Além disso, observou-se que a estabilização da OPI de interesse está
condicionada a determinação adequada dos parâmetros de controle e a definição correta
das condições iniciais. Esta sensibilidade às condições iniciais foi observada no estudo
do marca-passo natural. Então, sugere-se fazer a bacia de atração também para o
sistema acoplado.
Outra sugestão para trabalhos futuros é a identificação de outras OPIs do sistema
acoplado, sendo possível, dessa forma, encontrar outras patologias cardíacas menos
agressivas que a fibrilação ventricular e diferentes das já observadas ou, até mesmo, um
comportamento que se aproxime do ECG normal.
73
7
REFERÊNCIAS BIBLIOGRÁFICAS
Abarbanel, H. D. I., 1996, "Analysis of Observed Chaotic Data", Nova York: Springer,
272 p.
Attarsharghi, S., Jahed-Motlagh, M. R., Vasegh, N., Khaki-Sedigh, A., 2009, “Adaptive
Control of Chaos in Cardiac Arrhythmia”, Mechanical and Electronics Engineering,
pp. 49-53.
Auerbach, D., Predrag, C., Eckmann, J. P., Gunaratne, G. & Procaccia, I., 1987,
“Exploring Chaotic Motion Through Periodic Orbits”, Physical Review Letters, v.
58, n. 23, pp. 2387-2389.
Babloyantz, A. & Destexhe, A., 1988, “Is the normal heart a periodic oscillator?”,
Biological Cybernetics, vol. 58, n. 3, pp. 203-211.
Bessa, W. M., De Paula, A. S. & Savi, M. A., 2009, “Chaos Control Using an Adaptive
Fuzzy Sliding Mode Controller With Application to a Nonlinear Pendulum”, Chaos,
Solitons and Fractals, v.42, pp.784-791.
Bezerianos, A., Bountis, T., Papaioannou, G. & Polydoropoulos, P., 1995, “Nonlinear
Time Series Analysis of Electrocardiograms”, Chaos, v. 5, n. 1, pp. 95-101.
Chen, G., 2001, “Introduction to Chaos Control and Anti-Control”, In: Leung, T. P.;
Qin, H. –S., Advanced Topics in Nonlinear Control Systems, Singapore: World
Scientific Pub. Co., 2001, cap. 6, pp. 193-245.
Christini, D. J., Stein, K. M. Markowitz, S. M., Mittal, S., Slotwiner, D. J., Scheiner, M.
A., Iwai, S. & Lerman, B. B., 2001, “Nonlinear-Dynamical Arrhythmia Control in
Humans”, Medical Sciences, v. 98, n. 10, pp. 5827-5832.
Christini, D.J. & Glass, L., 2002, “Introduction: Mapping and Control of Complex
Cardiac Arrhythmias”, Chaos, v.12, n.3, pp.732-739
Cunningham, W. J., 1954, “A Nonlinear Differential-Difference Equation of Growth”,
Mathematics, v. 40, pp. 708-713.
De Paula, A. S. & Savi, M. A., 2008, “A Multiparameter Chaos Control Method
Applied to Maps”, Brazilian Journal of Physics, v.38, n.4, pp.537-543.
74
De Paula, A. S. & Savi, M. A., 2009a, “Controlling Chaos in a Nonlinear Pendulum
Using an Extended Time-Delayed Feedback Method”, Chaos, Solitons and Fractals,
v. 42, pp. 2981-2988.
De Paula, A. S. & Savi, M. A., 2009b, “A Multiparameter Chaos Control Method Based
on OGY Approach”, Chaos, Solitons and Fractals, v.40, n.3, pp.1376-1390.
De Paula, A. S. & Savi, M. A., 2011, “Comparative Analysis of Chaos Control
Methods: A Mechanical System Case Study”, International Journal of Non-Linear
Mechanics, v.46, pp.1076-1089.
De Paula, A. S., Savi, M. A., Wiercigroch, M., Pavlovskaia, E., 2012, “Bifurcation
Control of a Parametric Pendulum”, International Journal of Bifurcation and Chaos
in Applied Sciences and Engineering, v.22, n.5, pp.1250111-1250111.
Dubin, D., 1996, “Interpretação Rápida do ECG...Um Curso Programado”, Rio de
Janeiro: Ed. de Publicações Científicas, v.1, 295 p.
Dubljevic, S., Lin, S.F. & Christofides, P.D., 2008, “Studies on Feedback Control of
Cardiac Alternans”, Computers & Chemical Engineering, v.32, n.9, pp.2086-2098.
Farmer, J.D., 1982, “Chaotic Attractors of an Infinite-Dimensional Dynamical System”,
Physica 4D, pp. 366-393.
Ferreira, B. B., De Paula, A. S. & Savi, M. A., 2011, “Chaos Control Applied to Heart
Rhythm Dynamics”, Chaos, Solitions and Fractals, v. 44, pp. 587-599.
Garfinkel, A., Spano, M. L., Ditto, W. L. & Weiss, J. N., 1992, “Controlling Cardiac
Chaos”, Science, v. 257, pp. 1230-1235.
Garfinkel, A., Weiss, J. N., Ditto, W. L. & Spano, M. L., 1995, “Chaos Control of
Cardiac Arrhythmias”, Trends in Cardiovascular Medicine, v. 5, n. 2, pp. 76-80.
Glass, L., Guevara, M. R., Shrier, A. & Perez, R., 1983, “Bifurcation and Chaos in a
Periodically Stimulated Cardiac Oscillator”, Physica 7D, pp. 89-101.
Glass, L., Goldberger, A. L., Courtemanche, M. & Shrier, A., 1987, “Nonlinear
Dynamics, Chaos and Complex Cardiac Arrhythmias”, Proceedings of the Royal
Society of London, v. 413, n. 1844, pp. 9-26.
Glass, L. & Hunter, P., 1990, “There is a Theory of Heart”, Physica D, 43, pp. 1-16.
75
Godoy, M. F., 2003, “Teoria do Caos Aplicada à Medicina”, Dissertação de Mestrado,
Faculdade de Medicina de São José do Rio Preto.
Gois, S. R. S. M. & Savi, M. A., 2009, “An Analysis of Heart Rhythm Dynamics Using
a Three-Coupled Oscillator Model”, Chaos, Solitons and Fractals, v. 41, pp. 25532565.
Grudzinski, K. & Zebrowski, J. J., 2004, “Modeling Cardiac Pacemakers with
Relaxation Oscillators”, Physica A, v. 336, pp. 153-162.
Hall, K., Christini, D. J., Tremblay, M., Collins, J. J., Glass, L. & Billette, J., 1997,
“Dynamic Control of Cardiac Alternans”, Physical Review Letters, v. 78, n. 23, pp.
4518-4521.
Hodkin, A. L. & Huxley, A. F., 1952, "A Quantitative Description of Membrane
Current and Its Application to Conduction and Excitation in Nerve", Journal of
Physiology, v. 117, pp. 500-544.
Hubinger, B., Doerner, R., Martienssen, W., Herdering, M., Pitka, R. & Dressler, U.,
1994, “Controlling Chaos Experimentally in Systems Exhibiting Large Effective
Lyapunov Exponents”, Physical Review E, v.50, n.2, pp.932-948.
Just, W., Bernard, T., Ostheimer, M., Reibold, E. & Benner, H., 1997, “Mechanism of
Time-Delayed Feedback Control”, Physical Review Letters, v.78, n.2, pp.203-206.
Kantz, H., 1994, “A Robust Method to Estimate the Maximal Lyapunov Exponent of a
Time Series”, Physics Letters A, v. 185, pp. 77-87.
Kantz, H. & Schreiber, T., 1998, “The Human ECG – Nonlinear Deterministic Versus
Stochastic Aspects”, IEEE Proceedings – Science, Measurement and Technology, v.
145, n. 6, pp. 279-284.
Kaplan, D. T. & Cohen, R. J., 1990, “Is Fibrillation Chaos?”, Circulation Research, v.
67, pp. 886-892.
Kapitaniak, T., 2005, "Controlling Chaos: Theoretical and Practical Methods in NonLinear Dynamics", San Diego: Academic Press Inc, 165p.
Karma, A. & Gilmour Jr, R. F., 2007, “Nonlinear Dynamics of Heart Rhythm
Disorders”, Physics Today, pp. 51-57.
76
Korte, R. J. de, Schouten, J. C. & Bleek, C. M. van den, 1995, “ Experimental Control
of a Chaotic Pendulum With Unknown Dynamics Using Delay Coordinates”,
Physical Review E, v.52, n.4, pp.3358-3365.
López, M. J., Consegliere, A., Lorenzo, J. & García, L., 2010, “Computer Simulation
and Method for Heart Rhythm Control Based on ECG Signal Reference Tracking”,
WSEAS Transactions on Systems, v. 9, n. 3, pp. 263-272.
Mensour, B. & Longtin, A., 1997, “Power Spectra and Dynamical Invariants for DelayDifferential and Difference Equations”, Physica D, v. 113, pp. 1-25.
Nakajima, H., 1997, “On Analytical Properties of Delayed Feedback Control of Chaos”,
Physics Letters A, v.232, pp.207-210.
Nakajima, H. & Ueda, Y., 1998, “Limitation of Generalized Delayed Feedback
Control”, Physica D, v.111, pp.143-150.
Postnov, D., Han, S. K. & Kook, H., 1999, “Synchronization of Diffusively Coupled
Oscillators Near the Homoclinic Bifurcation”, Physical Review E, v. 60, n. 3, pp.
2799-2807.
Pyragas, K., 1992, “Continuous Control of Chaos by Self-Controlling Feedback”,
Physics Letters A, v. 170, pp. 421-428.
Pyragas, K., 1995, “Control of Chaos Via Extended Delay Feedback”, Physics Letters
A, v. 206, pp. 323-330.
Pyragas, K., 2001, “Control of Chaos Via an Unstable Delayed Feedback Controller”,
Physics Review Letters, v. 86, n. 11, pp. 2265-2268.
Pyragas. K., 2006, “Delayed Feedback Control of Chaos”, Philosophical Transactions
of the Royal Society A, v.364, pp.2309-2334.
Ott, E., Grebogi, C. & Yorke, J. A., 1990, “Controlling Chaos”, Physical Review
Letters, v. 64, n. 11, pp. 1196-1199.
Santos, A. M., Lopes, S. R. & Viana, R. L., 2004, “Rhythm Synchronization and
Chaotic Modulation of Coupled Van der Pol Oscillators in a Model for the
Heartbeat”, Physica A, v. 338, pp. 335-355.
Savi, M. A., 2005, “Chaos and Order in Biomedical Rhythms”, Journal of the Brazilian
Society of Mechanical Sciences and Engineering, v. 27, n. 2, pp. 157-169.
77
Savi, M. A., 2006, "Dinâmica Não-Linear e Caos", Rio de Janeiro: E-papers, v. 1, 304p.
Socolar, J. E. S, Sukow, D. W. & Gauthier, D. J., 1994, “Stabilizing Unstable Periodic
Orbits in Fast Dynamical Systems”, Physical Review E, v. 50, n. 4, pp. 3245-3248.
Sprott, J.C., 2007, “A Simple Chaotic Delay Differential Equation”, Physics Letters A,
v. 366, pp. 397-402.
Stein, K. M., Walden, J., Lippman, N. & Lerman, B. B., 1999, “Ventricular Response in
Atrial Fibrillation: Random or Deterministic?”, American Journal of Physiology Heart and Circulatory Physiology, v. 277, pp. H452-H458.
Tong, Q. & Liu, Z., 1990, “Nonlinear Dynamic Behavior of Cardiac Oscillators”,
International Journal of Cardiology, v. 26, pp. 211-216.
Ushio, T., 1996, “Limitation of Delayed Feedback Control in Nonlinear Discrete-Time
Systems”, IEEE Transactions on Circuit Systems I: Fundamental Theory Applied,
v.43, pp.815-816.
Van der Pol, B. & Van der Mark, J., 1928, “The Heartbeat Considered as a Relaxation
Oscillator and an Electrical Model of the Heart”, Philosophical Magazine, v.6,
pp.763-775.
Wessel, N., Kurths, J., Ditto, W., Bauernschmitt, R., 2007, “Introduction:
Cardiovascular Physics”, Chaos, v.17, n.1, Article Number: 015101.
Witkowski, F. X., Kavanagh, K. M., Penkoske, P. A., Plonsey, R., Spano, M. L., Ditto,
W. L. & Kaplan, D. T., 1995, “Evidence for Determinism in Ventricular
Fibrillation”, Physical Review Letters, v. 75, n. 6, pp. 1230-1233.
Wolf, A., Swift, J.B., Swinney, H.L. & Vastano, J.A., 1985, “Determining Lyapunov
Exponents from a Time Series”, Physical D, v. 16, pp. 285-317.
78