M E S T R AD O I N T E G R AD O E M E N G E N H AR I A E L E C T R O T É C N I C A E D E C O M P U T AD O R E S
Ramo de Automação - 4º Ano
Controlo de Movimento
Caderno de Problemas
A. Pina Martins – Rui E. Araújo
2007
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
CONTROLO DE MOVIMENTO
Caderno de Problemas
Índice
1ª Parte, motores de corrente contínua
1
Características de um accionamento com conversor CC/CC............................................. 1
2
Accionamento com controlador proporcional.................................................................... 2
3
Accionamento com ponte tiristorizada monofásica ........................................................... 3
4
Accionamento com ponte trifásica e indutor controlado ................................................... 4
5
Caracterização de diferentes modelos de um accionamento com ponte trifásica .............. 5
6
Accionamento com ponte trifásica e filtro de harmónicos na entrada ............................... 6
7
Quatro quadrantes com pontes trifásicas em anti-paralelo ................................................ 7
8
Conversor CC/CC de um quadrante tiristorizado .............................................................. 8
9
Caracterização de um accionamento com conversor CC/CC e baixo ripple de binário .... 9
10
Regime dinâmico com um conversor CC/CC de um quadrante .................................. 10
11
Controlo com conversor CC/CC de quatro quadrantes................................................ 11
12
Frenagem reostática com conversor CC/CC de quatro quadrantes.............................. 12
13
Motor série com conversor CC/CC de um quadrante e frenagem reostática ............... 13
__________________________________________________________________________________________
A. Pina Martins, Rui E. Araújo
i
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
CONTROLO DE MOVIMENTO
Caderno de Problemas
1
Características de um accionamento com conversor CC/CC
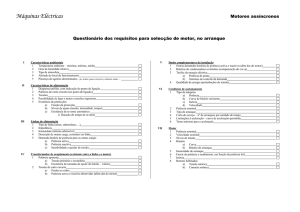
A figura mostra a característica binário-velocidade, L, de uma carga mecânica e as
características T-n de dois pontos de funcionamento de um controlador associado, D1 e D2. A
carga pode ser definida por: n=50*T (T em N.m; n em rpm).
As rectas D1 e D2 passam pelos pontos (0, 1000); (40, 800) e (0, 1600); (40, 1400),
respectivamente.
O momento de inércia total é de J=0.2 kg.m2.
n
(rpm)
L
2000
p2
1000
0
D2
p1
20
D1
40
T (Nm)
Característica binário-velocidade de uma carga e característica de um controlador.
a) Justifique a evolução das curvas D1 e D2 do controlador de potência. Esta evolução aplicase a qualquer tipo de conversor?
b) Os pontos de intersecção p1 e p2 são pontos de funcionamento estáveis ou não? Justifique.
c) Em caso afirmativo para b) determine as coordenadas dos dois pontos de funcionamento.
d) Dimensione, justificando, um conversor CC/CC de dois quadrantes, com limitação de
corrente, para esta aplicação. Seleccione, igualmente, um motor CC de excitação
separada.
e) Considere o sistema no ponto p2 e que o controlador muda de referência para D1. Esboce
(simule) a evolução temporal de T e de n no primeiro meio segundo da transição p2-p1.
f) Considere, agora, o sistema no ponto p1 e que o controlador muda de referência para D2.
Comente a evolução temporal de T e de n para esta transição p1-p2.
__________________________________________________________________________________________
A. Pina Martins, Rui E. Araújo
1
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
CONTROLO DE MOVIMENTO
Caderno de Problemas
2
Accionamento com controlador proporcional
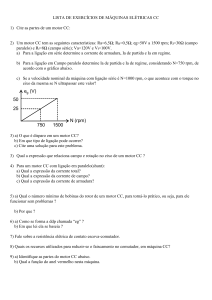
O motor de 20 Hp (14.9 kW), de 1750 rpm, utilizado no accionamento controlado
representado na figura, tem as seguintes características principais:
Un=230 V; In=74 A; Ra=0.18 Ω; La=2.93 mH; potência de campo: Wf=200 W
O binário resistente é de ¾ do nominal e a carga apresenta J=0.156 kg.m2
Controlador de
velocidade
nref
+
-
Controlador
PI
Ia, máx
Conversor
electrónico
vt
Motor
Limitação
de corrente
Carga
Taquímetro
ia
Realimentação
de velocidade
Diagrama de blocos de um accionamento controlado.
a) Obtenha as funções de transferência ω(s)/Vt(s) e ω(s)/(-Tw(s)) para o motor.
b) Calcule a velocidade do motor quando a excitação é a nominal mas Vt=210 V e o binário é
¾ do nominal. Considere que o binário de perdas é proporcional à velocidade.
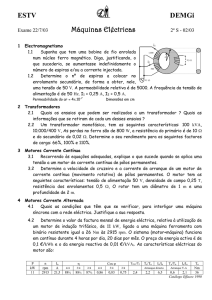
c) Admita que o conversor é CC/CC; o transdutor de velocidade é um gerador taquimétrico e
a referência de velocidade é obtida a partir de uma fonte CC regulada de 50 V. O valor
nominal de Vref é de 40 V. Em regime permanente o controlador é apenas proporcional.
Para que a velocidade não varie mais que 1% entre a situação de vazio e o binário nominal
determine o valor do ganho do taquímetro e o ganho do amplificador de potência.
Referência
de velocidade
Controlador
Fonte de
alimentação
Conversor
electrónico
vt
Tw
Motor
e Carga
ω
Medida de
velocidade
Diagrama simplificado de um accionamento controlado em malha fechada.
d) Represente (simule) a evolução das diferentes grandezas do motor durante a evolução
entre Nn/10 e a velocidade nominal.
__________________________________________________________________________________________
A. Pina Martins, Rui E. Araújo
2
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
CONTROLO DE MOVIMENTO
Caderno de Problemas
3
Accionamento com ponte tiristorizada monofásica
Um motor CC, de excitação separada, é alimentado a partir de uma rede de 240 V; 50 Hz,
através de uma montagem rectificadora monofásica, paralela dupla, totalmente tiristorizada.
Considere para o motor:
Un=230 V, In=12.9 A, Nn=1950 rpm, Ra=2 Ω, La=50 mH
Admita que a carga apresenta:
T=1.0I N.m
Despreze as perdas do rectificador e a impedância da fonte de alimentação.
vf
ia
+
vs
vt
-
Ea
Φ
ω
Motor de corrente contínua actuado por rectificador monofásico.
a) Determine o binário que o motor desenvolve quando roda à velocidade de 150 rad/s com
um ângulo de disparo da montagem rectificadora igual a 60°. Sugestão: comece por
verificar se a corrente no motor é contínua.
b) Discuta métodos de melhoramento das características estáticas de accionamento de
motores de corrente contínua com conversores CA/CC monofásicos. Em conversores
trifásicos, esta questão apresenta a mesma importância?
c) Supondo que o binário de carga sofre um aumento de 50%, determine o ângulo de disparo
da montagem rectificadora por forma a que a velocidade permaneça igual a 150 rad/s.
d) Suponha agora que a montagem rectificadora e a máquina CC são ligadas por forma a
permitir recuperação de energia à velocidade de 150 rad/s. Determine o binário
desenvolvido para um ângulo de disparo de 150°.
e) Esboce (simule) as formas de onda da tensão e da corrente no motor para as condições da
alínea anterior.
__________________________________________________________________________________________
A. Pina Martins, Rui E. Araújo
3
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
CONTROLO DE MOVIMENTO
Caderno de Problemas
4
Accionamento com ponte trifásica e indutor controlado
Considere o sistema de controlo de movimento esquematizado na figura a seguir.
O rectificador trifásico é alimentado por 220/380 V; 50 Hz
Para os conversores monofásicos admita que: 220 V; 50 Hz.
Vf
ia
P2A
+
Vc
vt
P1
Ea
Φ
P2B
ω
Motor de corrente contínua actuado por rectificador trifásico, com possibilidade de variação do fluxo indutor.
O motor tem as seguintes características:
Un=500 V; In=60 A; Ra=50 mΩ; La=30 mH; Rf=15 Ω; Lf=700 mH; Nn=2000 rpm
Esta máquina de corrente contínua, accionada como gerador a 1000 rpm e em vazio permitiu
obter uma característica Eo=f(If) linear até Eo=300 V, com If=15 A.
a) Supondo Tr=Tn e n=Nn/5 defina os ângulos de escorvamento das montagens rectificadoras
PD3 e PD2.
b) Para Tr=Tn/3 e n=1.9Nn quais os ângulos de escorvamento das montagens rectificadoras
PD3 e PD2?
c) Suponha que o motor está a rodar à carga e binário nominais e que pretende efectuar uma
frenagem com recuperação de energia. Diga, sucintamente, como actuaria. Implemente
em diagrama de simulação.
d) Admita que o circuito de comando modifica o ângulo de disparo da montagem PD3 de tal
modo que a corrente no induzido é 1.1In e que a carga tem as seguintes características:
J=0.25 Kg.m²; B=0.1 N.m.s. Diga qual o tempo que o motor demora a parar (simule).
__________________________________________________________________________________________
A. Pina Martins, Rui E. Araújo
4
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
CONTROLO DE MOVIMENTO
Caderno de Problemas
5
Caracterização de diferentes modelos de um accionamento com
ponte trifásica
Um motor CC de excitação separada, Un=500 V, Nn=1750 rpm, apresenta os seguintes
parâmetros com corrente de campo nominal:
Ia=153.71 A, Ra=0.088 Ω, La=1.83 mH, Kb=2.646 Vs/rad
a) Represente o binário, a f.e.m. induzida, a potência, e o fluxo indutor em função da
velocidade (em unidades normalizadas) para a corrente nominal da armadura e para um
funcionamento intermitente com 1.2 p.u. de corrente na gama de velocidades entre 0 e 2
p.u..
b) O motor indicado é controlado por um rectificador trifásico totalmente controlado
alimentado por uma rede de 230/400 V, 50 Hz. Determine o ângulo de disparo quando a
máquina roda à velocidade nominal desenvolvendo o binário nominal. (Assuma que a
corrente na armadura é contínua). Simule esta condição de funcionamento.
Motor de corrente contínua actuado por rectificador trifásico, com possibilidade de variação do fluxo indutor.
c) Assumindo que a corrente é contínua, represente o ângulo de disparo em função da
velocidade mantendo o binário no valor nominal, para a gama de velocidades entre 0 e 1
p.u.
d) Obtenha um modelo de média para este sistema e, com ele, simule, de novo, a alínea b).
__________________________________________________________________________________________
A. Pina Martins, Rui E. Araújo
5
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
CONTROLO DE MOVIMENTO
Caderno de Problemas
6
Accionamento com ponte trifásica e filtro de harmónicos na
entrada
Um accionamento de dois quadrantes baseado em motor CC de excitação separada utiliza um
rectificador trifásico alimentado pela tensão 115/230 V, 50 Hz. O motor tem os seguintes
parâmetros:
Un=230 V, P=40 Hp, Nn=1500 rpm
Ra=0.066 Ω, La=6.5 mH, Kb=1.33 Vs/rad, J=25 kgm2, Bl=0.4 Nms/rad
A carga apresenta um binário resistente proporcional à velocidade.
a) Seleccione os tirístores para o conversor, considerando que a corrente não excede 1.2 p.u.
nos regimes transitórios do accionamento.
b) Represente a característica binário-velocidade em função do ângulo de disparo do
conversor, quer em condução contínua quer em condução descontínua.
c) Dimensione um filtro de harmónicos para atenuar adequadamente (consulte Normas
aplicáveis) os 5º e 7º harmónicos na entrada do conversor. Considere um equivalente
indutivo da rede. Simule a condição de funcionamento no circuito de entrada à velocidade
nominal.
Filtro de harmónicos na entrada de um rectificador associado a um motor de corrente contínua.
d) Represente (simule) a variação de velocidade entre a nominal e Nn/10 bem como a
variação inversa.
__________________________________________________________________________________________
A. Pina Martins, Rui E. Araújo
6
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
CONTROLO DE MOVIMENTO
Caderno de Problemas
7
Quatro quadrantes com pontes trifásicas em anti-paralelo
Considere o sistema de controlo de velocidade representado na figura.
iA
iB
+
iM
Vc
Vc
Φ
vt
PA
-
PB
ω
Motor de corrente contínua actuado por dois rectificadores trifásicos, em antiparalelo, no induzido.
As características do motor são:
Un=200 V; In=50 A; Ra=0.5 Ω; La=10 mH; Nn=1520 rpm
Para a carga admita que:
J=2 Kg.m²; B=0.02 Nms
A saída das pontes trifásicas é caracterizada por:
Uav=270 V (em vazio); ∆U=20 V (com I=50 A)
a) Justifique a característica de saída das pontes trifásicas.
b) Implemente um modelo de simulação para este sistema.
c) Que método de controlo deve ser utilizado com esta estrutura de potência? Dimensione as
bobinas interfases.
d) Se fosse Tr=K.n2 (com binário nominal à velocidade nominal) obtenha o valor do ângulo
de disparo da ponte A se o motor rodar a Nn/2.
NOTA. Admita o binário de carga constante e de valor nominal para as alíneas seguintes.
e) Efectua-se uma frenagem com corrente constante, igual a 1.5In, a partir da velocidade e
binário nominais. Determine o valor inicial do ângulo de disparo da ponte A. Justifique.
f) A frenagem é seguida de inversão do sentido de rotação até à velocidade nominal,
mantendo-se I=1.5In durante a aceleração. Determine, aproximadamente, o tempo total
desde o início da frenagem até se atingir a velocidade nominal inversa. Simule este regime
dnâmico.
__________________________________________________________________________________________
A. Pina Martins, Rui E. Araújo
7
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
CONTROLO DE MOVIMENTO
Caderno de Problemas
8
Conversor CC/CC de um quadrante tiristorizado
Um motor CC é alimentado por uma fonte de tensão de 24 V através de um conversor CC/CC
de um quadrante, à frequência de 1 kHz. A queda de tensão nos semicondutores é constante e
igual a 1 V. Os parâmetros do motor são:
Pn=1 Hp, Un=10 V, η=78.5%, Nn=2500 rpm, Ra=0.01 Ω, La=2 mH, Kb=0.03819 V/rad/s
a) Determine a variação do duty-cycle requerida para ter uma variação de velocidade de 0 a
1 p.u.sob um binário constante de 2 p.u.
b) Considerando, agora, qua a carga é de binário proporcional à velocidade, com binário
nominal à velocidade nominal, calcule e represente a evolução do duty-cycle em função
da velocidade. Note que o máximo binário permitido no motor é de 2 p.u. e que o
coeficiente de atrito do motor é de 0.002 Nm.s/rad.
Motor de corrente contínua controlado por conversor CC/CC tiristorizado.
c) Represente a corrente na fonte de tensão em duas condições de funcionamento distintas
(corrente contínua e corrente descontínua) e dimensione um filtro apropriado de modo a
limitar a ondulação da corrente. Ilustre com resultados obtidos por simulação.
d) Especifique um momento de inércia para a carga admitindo, ainda, binário proporcional à
velocidade, e represente a evolução das diferentes grandezas eléctricas e mecânicas no
motor durante o arranque desde parado até à velocidade nominal.
__________________________________________________________________________________________
A. Pina Martins, Rui E. Araújo
8
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
CONTROLO DE MOVIMENTO
Caderno de Problemas
9
Caracterização de um accionamento com conversor CC/CC e
baixo ripple de binário
Uma fonte de tensão de 150 V alimenta um conversor CC/CC, com frequência de comutação
de 2000 Hz, que, por sua vez, está ligado a um motor CC de excitação separada com as
seguintes características:
Pn=3 Hp, Un=120 V, Nn=1500 rpm, Ra=0.8 Ω, La=3 mH, Kb=0.764 V/rad/s
O motor deve ser utilizado em aplicações em baixa velocidade requerendo um binário
pulsatório inferior a 2% do binário nominal à velocidade de 300 rpm.
a) Estabeleça critérios e dimensione o filtro do barramento CC e a resistência de frenagem.
b) Avalie a adequação deste drive a este conjunto de especificações. Mostre de que forma a
topologia do conversor CC/CC influencia esta avaliação.
c) Considerando a melhor topologia de potência, determine a frequência de comutação
necessária para impor esta ondulação do binário. Em alternativa determine o valor da
indutância necessária a colocar em série com a armadura do motor para garantir a mesma
condição.
d) Considere que o motor se insere num sistema de controlo de posição e que o binário
pulsatório deve ser inferior a 1% do binário nominal. Se, com o motor parado, for
produzido um binário máximo de 3 p.u. determine o aumento da frequência de comutação
necessário.
e) Utilizando um controlador de corrente por histerese represente o funcionamento do motor
na condição de velocidade nominal e 1 p.u. de binário e quando parado, com 3 p.u. de
binário.
Cadeia de conversão de energia de um accionamento baseado em motor de corrente contínua.
f) Mostre a evolução de um regime dinâmico deste accionamento.
__________________________________________________________________________________________
A. Pina Martins, Rui E. Araújo
9
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
CONTROLO DE MOVIMENTO
Caderno de Problemas
10 Regime dinâmico com um conversor CC/CC de um quadrante
Um motor de corrente contínua, de excitação separada, é alimentado a partir de baterias de 72
V, através de um conversor CC/CC, funcionando à frequência de 1 kHz.
Considere as seguintes características para o motor:
Un=72 V, In=13.1 A, Nn=1300 rpm, Ra=0.3 Ω, La=60 mH
Vf
T
ia
Vcc
D
vt
A
Ea
Φ
ω
Motor de corrente contínua actuado por conversor CC/CC, de um quadrante.
a) Considerando Ra=0, determine as formas de onda da tensão e da corrente no motor,
supondo que este roda à velocidade de 90 rad/s, com um binário de carga de 5 N.m.
Despreze as perdas no conversor CC/CC.
b) Determine novamente as formas de onda solicitadas em a), mas considerando, agora, a
resistência do induzido do motor.
c) O sistema de controlo é solicitado a fornecer a máxima velocidade possível,
permanecendo o binário de carga constante, 5 N.m, durante o arranque. Descreva as
condições de funcionamento do motor durante o arranque, supondo que o conversor
CC/CC limita automaticamente a corrente no induzido do motor em 30 A. Considere a
inércia do conjunto motor-carga, J=0.2 Kg.m². Implemente as referidas condições num
diagrama de simulação e apresente os respectivos resultados.
d) Neste sistema, considere a necessidade de operação a velocidades superiores à nominal.
Altere o diagrama de simulação de modo a permitir esta funcionalidade e represente a
evolução das diferentes variáveis do sistema (eléctricas e mecânicas) quando este evolui
desde a velocidade nominal até 2000 rpm, com o mesmo binário de carga, 5 N.m.
__________________________________________________________________________________________
A. Pina Martins, Rui E. Araújo
10
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
CONTROLO DE MOVIMENTO
Caderno de Problemas
11 Controlo com conversor CC/CC de quatro quadrantes
Considere um motor CC de excitação separada, cuja armadura é alimentada por um conversor
CC/CC. O indutor é alimentado por uma ponte PD2 tiristorizada com Vrms=110 V.
T1
T3
Ia
Vcc
Vt
+
Φ
T2
T4
Motor de corrente contínua actuado por conversor CC/CC, de quatro quadrantes.
O conversor CC/CC tem os seguintes parâmetros: Vcc=400 V; Fc=10 kHz. O motor apresenta
as seguintes características principais:
Pn=5 kW; Nn=2000 rpm; Vtn=360 V; Ian= 14 A; Ra=0.3 Ω; La=1.5 mH
A carga apresenta como características: Tl=10+ω/14; J=0.05 kg.m2
a) O motor inicia uma aceleração de 500 a 2000 rpm. Determine o duty-cycle do conversor
no início do arranque, considerando que este é feito com 1.2 Ian. Qual o tempo de
aceleração? Compare com o resultado obtido por simulação.
b) Considerando uma actuação a potência constante, determine o duty-cycle do conversor
quando a velocidade é a máxima possível para esta carga. Justifique.
c) Determine a regulação de velocidade entre a situação de vazio e a carga nominal, quando
o sistema motor-carga está sujeito ao controlador proporcional esquematizado na figura.
Compare com o resultado obtido por simulação.
Vref
[-10...0...10]
+
-
Controlador
Kp=7
Taquímetro
G=40
ω
Kv=1/23
Circuito de controlo de velocidade, em malha fechada, para o conversor CC/CC.
__________________________________________________________________________________________
A. Pina Martins, Rui E. Araújo
11
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
CONTROLO DE MOVIMENTO
Caderno de Problemas
12 Frenagem reostática com conversor CC/CC de quatro
quadrantes
Um motor CC de excitação separada está associado ao sistema de controlo de potência
representado na figura seguinte. As características do motor são:
Un=230 V, In=5 A, Ra=4.2 Ω, La=52 mH, Nn=1250 rpm
Admita que Lf=4 mH e Cf=10 mF
Lf
Rb
Vs
Uf
Cf
Controlo
Conversor
CC/CC de 4
quadrantes
Motor
CC
Φ
Tb
Sistema de alimentação para motor CC de excitação separada, com frenagem reostática.
a) Se for Vs=230 V, 50 Hz, considera que o sistema de filtragem está correctamente
dimensionado? Justifique.
b) Dimensione a resistência de frenagem, Rb.
c) Apresente a estrutura de potência do conversor CC/CC e compare os métodos de controlo
com tensão de saída bipolar e unipolar.
d) Admitindo o motor a funcionar nas condições nominais e que este é solicitado a inverter o
sentido de rotação até à velocidade nominal inversa (com binário resistente nominal),
represente no plano (T, ω) uma possível trajectória do ponto de funcionamento do motor.
Justifique. Represente este regime dinâmico a partir de dados de simulação.
e) Inclua no diagrama de simulação o modelo completo representado na figura e projecte o
circuito de controlo de frenagem. Refaça a alínea d) com ênfase na evolução das
grandezas do barramento CC e do circuito de frenagem.
__________________________________________________________________________________________
A. Pina Martins, Rui E. Araújo
12
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Mestrado Integrado em Engenharia Electrotécnica e de Computadores
CONTROLO DE MOVIMENTO
Caderno de Problemas
13 Motor série com conversor CC/CC de um quadrante e frenagem
reostática
Um motor CC série tem as seguintes características:
Un=240 V; In=20 A; Nn=1500 rpm; Ra=0.5 Ω; La=25 mH; Rf=0.5 Ω; Lf=10 mH
Este motor encontra-se inserido no sistema da figura a seguir, em que:
Vcc=280 V; Fc=1200 Hz
O motor acciona uma carga caracterizada por:
Tr=60-ω/3.93 N.m (ω em rad/s); J=0.4 Kg.m²
T1
Vcc
ia
D1
vt
Ea
Φ
ω
Motor de corrente contínua, do tipo série, actuado por conversor CC/CC, de um quadrante.
a) Projecte e implemente um diagrama que permita configurar, de modo automático, as duas
topologias apresentadas.
b) O motor é acelerado com A=25 rad/s2 (mantida constante) desde n=300 rpm até à
velocidade nominal. Determine o valor de It1(av) 3 s após o início da aceleração.
c) Sabendo que a corrente máxima no motor é de 30 A e que a máxima aceleração é de 70
rad/s2 determine o tempo mínimo que o motor demora a passar de 300 rpm para a
velocidade nominal. Compare com o resultado obtido por simulação.
d) Para fazer regressar o motor à velocidade de 300 rpm é feita uma frenagem reostática,
como se representa na figura seguinte. O fluxo é mantido constante em 1.2 vezes o valor
nominal. Determine o valor do tempo de condução de T2 ao fim de metade do tempo de
frenagem, admitindo que a corrente é mantida constante no seu valor máximo. Considere
Rext=10 Ω e Fc=1200 Hz.
T1
if
ia
T2
Vcc
D1
vf
Ea
Rext
Φ
ω
Motor de corrente contínua, do tipo série, actuado por conversor CC/CC, em frenagem reostática.
__________________________________________________________________________________________
A. Pina Martins, Rui E. Araújo
13