Universidade Federal do Rio Grande do Norte
Centro De Ciências Exatas e da Terra
Departamento de Física Teórica e Experimental
Programa de Educação Tutorial
Curso de Nivelamento:
Mecânica
PET DE FÍSICA:
Carlene Paula Silva de Farias
Cleiton Cruz Serafim
Cristóvão Porciano do Nascimento Júnior
Edson José da Costa Santos
Flávio Maux Viana da Silva
Francisco Biagione de Lima Júnior
George Barbosa de Araújo
Ivandson Praeiro Sousa
Jadson Tadeu Dantas Souza
Maxwell Santana Libório
Rafaela Medeiros de Souza
Rodrigo dos Santos Candreva
Valmar da Silva Sobrinho
2011
NATAL-RN
Sumário
1. Álgebra Vetorial ............................................................................................................................................................ 2
1.1-Introdução. ............................................................................................................................................................. 2
1.2-Escalares e Vetores. ................................................................................................................................................ 2
1.3- Soma e Subtração de Vetores................................................................................................................................ 5
1.4- Produto Escalar. ..................................................................................................................................................... 5
1.5- Produto Vetorial. ................................................................................................................................................... 6
1.7- Exercícios. .............................................................................................................................................................. 7
2. Movimento Unidimensional e Bidimensional ............................................................................................................... 9
2.1-Velocidade .............................................................................................................................................................. 9
2.2-MRU – Movimento Retilíneo Uniforme ................................................................................................................ 10
2.3-Aceleração ............................................................................................................................................................ 10
2.4-MRUV – Movimento Retilíneo Uniformemente Variado ..................................................................................... 10
2.5-Movimento Bidimensional.................................................................................................................................... 11
2.6-Exercícios: ............................................................................................................................................................. 12
3. As Três Leis de Newton ............................................................................................................................................... 13
3.1-Leis de Newton ..................................................................................................................................................... 13
1ª Lei de Newton......................................................................................................................................................... 13
2ª Lei de Newton......................................................................................................................................................... 13
3ª Lei de Newton......................................................................................................................................................... 14
3.2-Exercícios: ............................................................................................................................................................. 14
4. Aplicação das Três Leis de Newton ............................................................................................................................. 16
4.1-Peso, massa e gravidade ....................................................................................................................................... 16
# Peso é diferente de massa!!! ................................................................................................................................... 17
4.2-Força de Tração .................................................................................................................................................... 17
4.3-Entre tapas e beijos .............................................................................................................................................. 18
4.4-Força normal ......................................................................................................................................................... 19
4.5-Força de atrito ...................................................................................................................................................... 19
4.6-Aplicações ............................................................................................................................................................. 22
5. Conservação da Energia Mecânica e do Momento Linear.......................................................................................... 27
5.1-Energia .................................................................................................................................................................. 27
5.2-Energia Cinética e Trabalho .................................................................................................................................. 27
5.3-Teorema Trabalho-Energia ................................................................................................................................... 27
5.4-Energia Potencial .................................................................................................................................................. 28
5.5-Energia Potencial Gravitacional ............................................................................................................................ 28
5.6-Energia Potencial Elástica ..................................................................................................................................... 29
5.7-Forças Conservativas e Não-Conservativas .......................................................................................................... 30
5.8-Momento Linear ................................................................................................................................................... 30
5.8.1-Conservação do Momento Linear ..................................................................................................................... 30
5.9-Exercícios: ............................................................................................................................................................. 31
1
1. Álgebra Vetorial
1.1-Introdução.
Todos nós já vimos acerca de grandezas matemáticas separadas entre grandezas escalares e vetoriais; mas a
pergunta até mesmo de pessoas que lidam com essas ferramentas de forma exaustiva, é o que elas significam? , ou
então que propriedades diferem umas das outras? , elas precisavam diferir? .Essas perguntas e outras devem ser
muito bem respondidas para que o leitor possa progredir bem em outros assuntos que utilizarão essas ferramentas
como base.
1.2-Escalares e Vetores.
Imaginemos primeiramente que temos um pedaço de pedra de geometria qualquer, jogado em um lugar
arbitrário de uma Sala de Estar, se quisermos medir o peso dessa pedra basta ter em mãos uma balança e da forma
com que fomos educados – treinados – mediremos erroneamente o peso da pedra que poderá ser 1, 2, 3...
quilogramas; imaginemos que o peso medido tenha sido de 3 kg. Logo mudamos a pedra sucessivas vezes de lugar e
medimos seu peso que continua sendo 3 kg, sabemos que a medida de peso em quilogramas provoca um
entendimento físico intuitivamente errado – razões que deixaremos para capítulos posteriores, é aconselhável dar
um passo de cada vez – mesmo assim é possível perceber que o “peso” não muda, mostrando que seu valor
independe do lugar da sala em que sua medida é feita.
Assim é uma grandeza escalar, independentemente de onde esteja – desde que conservada as condições –
ela denotará a intensidade de uma determinada grandeza física e podendo ser representada simplesmente por um
número, e como exemplo de grandezas escalares podemos citar o tempo, massa, etc. Mas sem esquecer de ressaltar
o peso não é uma grandeza escalar, pois como observamos acima ele só permanece o mesmo se as condições que
está sendo medido permanecerem as mesmas, o que permanece constante é sua massa, não se deixe confundir com
o exemplo acima que foi usado apenas para ilustrar uma grandeza escalar mediante algo que tratamos
cotidianamente, porém relembrado mais uma vez que esta idéia é errada.
Sim, agora que já sabemos o que é uma grandeza escalar, nos perguntarmos agora o que caracterizaria uma
grandeza vetorial? , o que seria um vetor?
Para respondermos estas e outras perguntas retomemos novamente o exemplo da pedra na Sala de Estar de
forma que agora desejamos dizer qual seria sua posição, para isto precisamos definir previamente um sistema de
coordenadas do qual tomaremos com referência e este será o sistema cartesiano. Se olharmos a sala de cima e por
uma representação matemática como sugerido anteriormente teremos a figura abaixo.
Figura 1.1- Sistema cartesiano de coordenadas em duas dimensões.
2
A medida que mudarmos a pedra de lugar pelo chão da sala veremos que ela marcará sempre uma distância
em relação ao eixo x e uma em relação ao eixo y . Mas para entendermos a essência do problema vejamos como
seria a mudança de posição de pedra apenas no eixo x.
Figura 1.2- Sistema cartesiano de coordenadas em uma dimensão.
A pedra é colocada em três posições diferentes seguindo uma ordem crescente em relação ao eixo x,
traçando uma reta a partir da origem até o local onde a pedra está localizada veremos que esta reta terá
comprimento igual ao da posição da pedra no eixo x ; então ela possui magnitude que dependerá da posição da
pedra, para que seja possível traçar uma reta é necessário que essa reta seja paralela ao eixo que estamos usando
indicando de tal forma que a mesma possui direção semelhante a do eixo x. Como já definimos que a reta está sendo
traçada da origem a posição em que a se encontra o sentido que a mesma segue é da esquerda para a direita, o que
é indicado por uma seta colocada na ponta da reta.
As características apresentadas acima são as propriedades matemáticas que definem um vetor, sem
confundir que um vetor é algo que representa uma magnitude, ou representa uma direção ou até mesmo um
sentido, mas sim que essas propriedades juntas é que fundamentam esse ente matemático denominado vetor.
Figura 1.3- Vetor posição A ao longo do eixo x.
Para passarmos de uma dimensão para duas dimensões primeiramente e assim sucessivamente devemos
saber que os eixo cartesianos x,y são escritos em termos de vetores fundamentais que são i para o eixo x e j para o
eixo y que são conhecidos como versores, esses são os vetores mínimos no sistema cartesiano de coordenadas,
também chamados de vetores unitários, significando que qualquer outro vetor diferente dos vetores unitários serão
escritos em termos deles.
Figura 1.4- Representação do Sistema Cartesiano em termos dos vetores unitários.
Para entendermos melhor lembremos mais uma vez do exemplo da pedra no eixo de coordenas x, as
possíveis posições da pedra da pelo vetor posição X, por exemplo, serão
0, 1, 2, … , .
3
(1.1)
Em relação ao eixo y a mesma regra é válida, mas para um objeto com posição representada no espaço
bidimensional – Fig. 1.4 – teremos que esse objeto terá uma posição em relação ao eixo x e outra em relação ao eixo
y.
O que pode nos levar a seguinte pergunta, como representar o vetor posição em já que os eixos x e y são
independentes? , na pergunta de imediato percebemos a resposta, por eles serem independentes podemos
representar um vetor que indique juntamente as posições nos eixos x e y. Se em relação ao coordenada x um objeto
está na posição e em relação ao eixo y esse mesmo objeto está na posição , tais que B e C são as
magnitudes dos vetores no eixo x e y respectivamente.
O vetor que representará a posição do objeto do espaço bidimensional será composto através da
combinação linear – soma – dos vetores e .
(1.2)
Figura 1.5- Vetor posição R no Sistema Cartesiano.
Você deve esta se perguntando, qual é a magnitude desse novo vetor? . Responderemos a esta pergunta
quando estivermos falando de produto escalar.
O vetor R no espaço tridimensional seria formado da mesma forma com construímos o espaço bidimensional
sendo adicionado apenas um eixo de coordenadas z com respectivo vetor unitário k. Abaixo temos uma
representação do espaço composto pelas três dimensões espaciais.
Figura 1.6 – Vetor R no espaço tridimensional.
4
1.3- Soma e Subtração de Vetores.
Iremos tratar de algumas operações usando vetores e para facilitar o trabalho não utilizaremos os eixos de
coordenadas, já que os mesmo não afetarão na compreensão deste tópico.
Dados os vetores A e B tal que o resultante será
(1.3)
é um vetor único, determinado pelo seguinte. Colocando-se o ponto inicial de B no ponto final de A teremos que o
vetor resultante será C que terá o ponto inicial de A e o ponto terminal em B.
Figura 1.7- Soma de Vetores.
Se os vetores A e B tiverem um ponto inicial em comum, logo será o vetor que liga o ponto terminal de
B ao ponto inicial de A.
(1.4)
Propriedades da adição vetorial.
A+B=B+A
(Lei comutativa)
A + (B + C) = (A + B) + C
(Lei associativa)
m(A + B) = mA + mB
(Lei distributiva)
(m + n)B = mB + nB
(Lei distributiva escalar)
C+0=C
(Identidade)
C + (- C) = C – C = 0
(Inversa)
1.4- Produto Escalar.
O produto escalar entre dois vetores A e B é um escalar e é dado por
. |||| cos
(1.5)
tal que é o ângulo entre os vetores A e B que pode ser expresso como
.
cos !|"||#|$
5
(1.6)
Propriedades do produto escalar:
A.B = B.A (Lei comutativa)
A.(B + C) = A.B + A.C (lei distributiva)
(mA).B = A.(mB) = m(A.B)
onde m é um escalar qualquer.
Outra maneira de vermos os vetor seria considerando agora o Sistema de coordenas de Cartesiano, onde
cada vetor terá uma componente associada ao eixo x, outra ao y e outro ao z.
Sejam então os vetores % %& %' ( e ) )& )' (, e fazendo o produto estalar entre
eles teremos
. % %& %' (. ) )& )' (
. % . ) )& )' ( %& . ) )& )' ( %' (. ) )& )' (
. % ) . % )& . % )' . ( *
… %& ) . %& )& . %& )' . ( *
… %' ) (. %' )& (. %' )' (. ( .
Onde as propriedades do produto escalar mostram que como os eixos são linearmente independentes o
produto entre índices diferentes devem ser nulos.
. = . ( = . = . ( = (. = (. = 0.
. = . = (. ( = 1.
Fazendo com que o produto resulte apenas em
. % ) %& )& %' )'
(1.7)
1.5- Produto Vetorial.
O produto vetorial de dois vetores A e B é dado por
+ |||| sin .
em que é o ângulo entre os vetores, e r é o vetor unitário perpendicular aos vetores A e B.
Propriedades do produto vetorial.
AxB = - BxA
(Lei anticomutativa)
Ax(B + C) = AxB + AxC (Lei distributiva)
(mA)xB = Ax(mB) = m(AxB) = mAxB
AxA = 0
6
(1.8)
Da mesma forma como fixemos no produto escalar usemos ainda os vetores % %& %' ( e
) )& )' ( realizemos produto vetorial e verifiquemos algumas de suas características.
+ % %& %' (+) )& )' (
/ % +) )& )' ( %& +) )& )' ( %' (+) )& )' (
/ % ) + % )& + % )' + ( *
… %& ) + %& )& + %& )' + ( *
… %' ) ( + %' )& ( + %' )' ( + (.
Para o produto vetorial os vetores unitários demonstram as seguintes propriedades.
/ / (/( 0.
/ (,
/( /( ,
(/ / (,
(/ Continuando o desenvolvimento do produto vetorial
/ % )& ( % )' %& ) ( %& )' %' ) %' )& / %& )' %' )& %' ) % )' (% )& %& ) (1.9)
que ainda pode ser apresentado na forma matricial como é dado a baixo
%
/ 0
)
%&
)&
(
%' 1
)'
(1.10)
1.7- Exercícios.
1.7.1- Faça a soma e a subtração dos vetores dados a baixo.
a) A = 2 8 5( e B = 20 4(.
b) A = 3 14 4( e B = 7 9 26(.
c) A = 5 44( e B = 8 3 6(.
d) A =
'
9
:;
<
&
24( e B = ' 17 :
(.
<
1.7.2-Use os vetores dados no exercício anterior e realize os produtos escalar e vetorial dados pelas equações (1.5),
(1.7), (1.8) e (1.9). Par as equações (1.5) e (1.7) use o valor do ângulo entre os vetores 30= .
1.7.3- Verifique a lei comutativa do produto escalar.
1.7.4-Verifique a lei distributiva do produto escalar.
7
Use a figura abaixo como ajuda.
1.7.5-Demonstre a Lei dos Cossenos.
1.7.6- Mostre que:
/ ||> ||> . > (Identidade de Lagrange)
1.7.7-Verifique a lei anticomutativa do produto vetorial.
1.7.8-Mostre que a área do paralelogramo formada pelos vetores adjacentes A e B com um ângulo é
? |/| |/|
1.7.9-Mostre as equações (1.9) e (1.10) são equivalentes.
8
2. Movimento Unidimensional e Bidimensional
Em um movimento unidimensional temos que a partícula se movimenta apenas em uma direção
sem variar essa direção, por exemplo: uma partícula se movimentando no eixo +. Já em um movimento
bidimensional a partícula se movimenta em um plano podendo mudar sua direção de movimento nesse
plano, por exemplo: uma partícula se movimentando no plano +, @.
2.1-Velocidade
A velocidade média de uma partícula entre dois pontos conhecidos é dada por:
AB ∆D
∆E
DF DG
EF EG
(2.1)
e representa o coeficiente angular entre o segmento de reta que liga esses dois pontos e o eixo +, ou seja
AB tan Já a velocidade instantânea é dada reta tangente a curva da função de movimento +J da partícula
no instante J.
9
2.2-MRU – Movimento Retilíneo Uniforme
No movimento retilíneo uniforme a partícula se movimenta com velocidade A constante em uma
direção. Utilizando a equação (1) e admitindo que a partícula inicialmente partisse no instante J 0,
temos:
A
∆+ +J +0 +J +K
J0
∆J
J0
+J +K AJ
(2.2)
a equação (2) representa a função horária de posição no MRU.
2.3-Aceleração
Se escolhermos arbitrariamente dois intervalos de tempo J a uma velocidade AJ e um tempo J&
a uma velocidade AJ& , a aceleração média entre esse intervalo de tempo é:
%B ∆L
∆E
LF LG
EF EG
(2.3)
2.4-MRUV – Movimento Retilíneo Uniformemente Variado
No movimento retilíneo uniformemente variado a partícula se movimenta com velocidade A
variável mais com a sua aceleração % constante em uma direção. Utilizando a equação (3) e admitindo que
a partícula inicialmente partisse no instante J 0, temos:
%
∆A AJ A0 AJ AK
∆J
J0
J0
AJ AK %J
(2.4)
a equação (4) representa a função horária de velocidade no MRUV. E a equação (5) representa a função
horária de posição no MRUV.
10
+J +K AK J %J &
&
(2.5)
2.5-Movimento Bidimensional
Neste movimento a partícula pode se movimentar tanto em relação ao eixo + como em relação ao
eixo @ num dado instante J, onde esse movimento e descrito pelo vetor posição MN J e pelo vetor
velocidade AN J. Por exemplo, considere o movimento de lançamento de projétil como mostra a figura
abaixo.
Temos que as componentes do vetor posição no eixo + e no eixo @ são dadas por:
+J MK cos AK cos J
@J MK sen AK sen J & PJ &
(2.6)
(2.7)
e as componentes do vetor velocidade são dadas por:
AD J AK cos
AQ J AK sen PJ
11
(2.8)
(2.9)
2.6-Exercícios:
2.6.1-O gráfico abaixo representa o movimento da partícula no eixo @ em função do tempo J.
a) Encontre o valor da velocidade média entre os instantes J 2R e J 4R;
b) A partir do gráfico acima calcule o valor velocidade em J 1R, J 2R e J 4R;
c) Considerando a função @J 5 2J 0,5J & , calcule o valor velocidade em J 1R, J 2R e
J 4R e compare com os valores obtidos a partir do gráfico.
2.6.2-Um objeto é lançado fazendo um ângulo com o solo, saindo com uma velocidade de módulo
igual a AK , sabendo que a aceleração da gravidade P é perpendicular ao solo. Encontre o alcance
máximo B e a altura máxima SB do objeto em função de , AK e P. Qual o valor de B e SB para
AK 20m/s e (considere P 9.8V/R & ):
a) 30°;
b) 45°;
c) 60°.
12
3. As Três Leis de Newton
3.1-Leis de Newton
1ª Lei de Newton
A primeira Lei de Newton conhecida como lei da inércia, sendo a mais sutil das três, foi formulada
vinte anos depois das duas outras que veremos a seguir e tem o seguinte enunciado: “Todo corpo
permanece em seu estado de repouso ou movimento uniforme em linha reta, a menos que seja obrigado a
mudar seu estado por forças impressas nele.”
Inércia é a propriedade que todos os corpos possuem de se oporem a alterações do estado de
repouso ou de movimento. A massa do corpo é a medida da inércia.
2ª Lei de Newton
A segunda lei de Newton conhecida como o princípio fundamental da mecânica tem o seguinte
enunciado: “A mudança do movimento é proporcional à força motriz impressa, e se faz segundo a linha
reta pela qual se imprime esta força.”
Essa lei pode ser escrita da seguinte maneira
XN V%N
(3.1)
A força impressa pela segunda lei altera o movimento do corpo, sendo a mudança proporcional a
ela. Nessa proporcionalidade, reside a possibilidade de uma ciência quantitativa e determinística. Mas é
importante notar que “a mudança do movimento” prevista pela segunda lei implica em comparações entre
o estado final e inicial do corpo. A “força motriz impressa” que muda o movimento do corpo só pode ser
definida se soubermos o que sucedia ao corpo na ausência dela, sendo este o papel da primeira lei. O
movimento retilíneo uniforme ou o repouso inercial dessa lei, que é uma propriedade inerente da matéria,
caracterizam ausências de “forças impressas”, sendo que só a partir de então, quando uma força é
“ligada”, é que a segunda lei ganha um sentido de relação entre grandezas preestabelecidas.
A 1ª lei cria assim sistemas de referenciais inerciais, sem os quais a 2ª Lei não é necessariamente
verdadeira e nem se quer é uma lei. O conceito dinâmico de “força motriz impressa” só fica esclarecido se
definir-se antes o que caracteriza sua ausência. A 1ª e a 2ª leis definem assim, dialeticamente, o conceito
newtoniano de força a partir de sua ausência e presença respectivamente.
OBS: A primeira lei não é uma particularidade da segunda na qual Y VZ [ quando Z [.
13
3ª Lei de Newton
A terceira lei de Newton conhecida como lei de ação e reação tem o seguinte enunciado: “A uma
ação sempre se opõe uma reação igual, ou seja, as ações de dois corpos, um sobre o outro, são iguais e se
dirigem a partes contrárias.”
Se um corpo A aplicar uma força sobre um corpo B, receberá deste uma força de mesma
intensidade, mesma direção e sentido oposto à força que A aplicou em B.
As forças de ação e reação têm as seguintes características:
• Estão associadas a uma única interação, ou seja, correspondem as forças trocadas entre apenas
dois corpos;
• Têm sempre a mesma natureza (ambas de contato ou ambas de campo), logo, possuem o mesmo
nome (“de contato” ou “de campo”);
• Ação e Reação, mesmo iguais e opostas, não se equilibram, pois agem em corpos distintos. Cada
força que constitui o par tem o seu próprio efeito;
• Ação e Reação são sempre iguais em valor; seus efeitos é que podem ser diferentes, pois
dependerão de outros fatores ( por exemplo, a massa);
• Ação e Reação ocorrem simultaneamente, e não um primeiro e depois a outra, de modo que
quaisquer umas das forças podem ser chamadas de ação ou reação;
• Ação e Reação são iguais e opostas mesmo que o sistema não seja de equilíbrio.
3.2-Exercícios:
3.2.1-Uma pedra gira em torno de um apoio fixo, presa por uma corda. Em dado momento corta-se a
corda, ou seja, cessam de agir forças sobre a pedra. Pela Lei da Inércia, conclui-se que:
a) a pedra se mantém em movimento circular.
b) a pedra sai em linha reta, segundo a direção perpendicular a corda no instante do corte.
c) a pedra sai em linha reta, segundo a direção da corda no instante do corte.
d) a pedra pára.
e) a pedra não tem massa.
3.2.2-Se o somatório das forças externas sobre um sistema de partículas de massa constante é zero, é
CORRETO afirmar ser constante a:
a) energia potencial do sistema.
b) energia mecânica do sistema.
c) temperatura do sistema.
d) quantidade de movimento do sistema.
e) entropia do sistema.
14
3.2.3-Tendo-se em vista a primeira lei de Newton, pode-se afirmar que:
a) se um objeto está em repouso, não há forças atuando nele.
b) é uma tendência natural dos objetos buscarem permanecer em repouso.
c) ela se aplica tanto a objetos em movimento quanto a objetos em repouso.
d) uma força sempre causa o movimento de um objeto.
3.2.4-No campeonato mundial de arco e flecha dois concorrentes discutem sobre a Física que está
contida na arte do arqueiro. Surge então a seguinte dúvida: quando o arco está esticado, no momento
do lançamento da flecha, a força exercida sobre a corda pela mão do arqueiro é igual à:
I. força exercida pela sua outra mão sobre a madeira do arco.
II. tensão da corda.
III. força exercida sobre a flecha pela corda no momento em que o arqueiro
larga a corda.
Neste caso:
a) todas as afirmativas são verdadeiras
b) todas as afirmativas são falsas
c) somente I e III são verdadeiras
d) somente I e II são verdadeiras
e) somente II é verdadeira
3.2.5-Considere a figura a seguir.
Dadas as forças f1, f2 e f3, o módulo de sua resultante, em N, é:
a) 30
b) 40
c) 50
d) 70
e) 80
15
4. Aplicação das
as Três Leis de Newton
Nesta capitulo apresentaremos algumas aplicações simples das leis de Newton a corpos que, ou
estão em equilíbrio (a = 0), ou estão em movimento retilíneo, sob a ação de forças externas constantes.
Admitiremos como modelo de calculo, que os corpos se comportem como partículas, não havendo
necessidade de levar em conta movimentos de rotação.
4.1-Peso, massa e gravidade
As crianças, de um modo geral, quando atingem aproximadamente um ano de idade gostam de jogar
pequenos objetos no chão. Nessa importante fase do desenvolvimento infantil elas estão vivenciando que
os objetos soltos de suas mãos, caem. Infelizmente,
Infelizmente, existem alguns pais que não compreendem o
comportamento dos anjinhos e justamente nessa época resolvem deixar certos objetos fora de seu
alcance. O que poucos sabem é que a culpa não é dos lindos pimpolhos.
Quando um objeto qualquer está em uma
uma região onde existe um campo gravitacional, um curioso
fenômeno se sucede: o objeto cai. Esse fato, amplamente estudado pelos físicos durante séculos, é
interpretado da seguinte forma: a Terra possui em torno de si um campo gravitacional.
Quando um objeto qualquer está mergulhado no campo gravitacional, sofre uma força, chamada de
força gravitacional ou simplesmente de FORÇA PESO.
Vamos considerar um corpo de massa m localizado em um ponto onde o modulo da aceleração em
queda livre é g. Nessa situação, o módulo do vetor peso (uma força) é
16
(4.1)
Esse vetor pode ser apresentado como
(4.2)
Ou como
(4.3)
# Peso é diferente de massa!!!
Sendo dependente de g,, o peso varia com a localização geográfica. Os corpos têm peso menor nas
altitudes elevadas do que ao nível do mar. Isso porque g diminui com o aumento da distancia ao centro da
Terra. O peso, todavia, diferentemente da massa, não é uma propriedade inerente invariável de um corpo.
Por exemplo, se Juliana tem a massa de 60 kg, então o valor do seu peso num lugar onde g = 9,80 m/s2 é
. No topo de uma montanha, onde g = 9,76 m/s2, esse peso seria de 488N apenas, o que
corresponde a uma diminuição de 2 N.
Logo, se você deseja perder peso sem dieta, faça uma escalada ou,
então, tome o seu peso durante o vôo numa aeronave, a 11 km de altura.
4.2-Força de Tração
Em muitas situações do cotidiano, em função da praticidade, é
conveniente utilizarmos cabos e cordas para transmitirmos forças a um
corpo. Por exemplo, quando vamos pescar utilizamos uma vara com um fio
de nylon para fisgar o peixe. Ninguém em sã consciência pensaria em
pegar peixe na "unha"!
17
Quando passeamos com nosso cachorro utilizamos a guia para controlar seu movimento. Seria muito
inconveniente controlar o animal segurando-o pelo pescoço.
Quando desejamos rebocar um carro utilizamos uma corda. O mesmo ocorre quando desejamos
“puxar” água de um poço, fizer com que um elevador suba ou desça soltar pipa ou elevar uma ponte
móvel.
Em todas essas situações, ao aplicarmos uma força em uma das extremidades do fio, corda ou cabo,
está é transmitida até a outra extremidade, agindo sobre o corpo desejado.
Em geral, podemos dizer que:
À força transmitida entre os extremos de um fio, corda ou cabo, denominamos de força de tração ou
]N.
tensão e, geralmente, é representada por \
Em geral, a corda é considerada sem massa (significando que sua massa em relação à do corpo é
desprezível) e não-extensível.
4.3-Entre tapas e beijos
Na Física, a idéia de contato está relacionada à interação que surge quando objetos se tocam.
Podemos entender essa idéia se pensarmos em nosso próprio corpo. Ele está equipado para sentir estas
interações, que podem se manifestar sob as mais diferentes formas, produzindo uma grande variedade de
sensações em nossa pele. Uma boa bofetada, por exemplo, corresponde a uma interação entre a mão de
quem bate e a face de quem recebe, assim como um carinho. Do ponto de vista da Física essas duas
interações são de mesma natureza. Uma diferença básica entre elas é a intensidade da força aplicada: uma
tapa, em geral, significa uma força muito mais intensa do que um carinho. Porém há outra diferença
importante entre a tapa e o carinho: a direção da força aplicada. Em uma tapa, a força é na direção
perpendicular à face da vítima e no carinho, em geral, essa força ocorre numa direção paralela à pele.
18
Essa distinção também ocorre em outras situações em que existe o contato entre os objetos. Em
batidas, chutes, pancadas, beijos, espetadas, ou mesmo simplesmente quando um objeto se apóia sobre
outro, temos forças que agem na direção perpendicular ou normal à superfície dos objetos por isso são
denominadas forças normais.
Em outros casos, a força aparece na direção paralela à superfície. É o que ocorre em situações como
arranhões, raspadas, esfregadas, deslizamentos, etc. Em geral, essas forças recebem o nome de forças de
atrito.
Portanto, os efeitos das forças de contato entre objetos dependem da maneira como são aplicadas,
paralela ou perpendicular à superfície. Mas não é só isso que influi.
4.4-Força normal
Quando algum objeto ou pessoa se apóia sobre uma superfície, ela forçar esta superfície para baixo (N). Por outro lado, a superfície sustenta a pessoa aplicando em seus pés uma força para cima (N): essa é a
força normal.
4.5-Força de atrito
Coisas que se raspam ou se esfregam estão em atrito umas com as outras. Esse atrito
também representa uma interação entre os objetos. Quando você desliza a mão sobre a
pele da pessoa amada, está exercendo sobre ela uma força de atrito.
De um modo geral, as forças de atrito se opõem aos movimentos. Ou seja, seu sentido
é oposto ao sentido do movimento. É isso que permite que um carro freie e pare: a força
de atrito entre o disco e a pastilha dos freios e o atrito entre o pneu e o chão.
As forças de atrito são também as responsáveis pela locomoção em terra. Quando empurramos a Terra
para trás para ir para frente, estamos interagindo através do atrito entre os pés e o chão. Sem atrito,
ficaríamos deslizando sobre o mesmo lugar.
19
Em determinadas situações é fundamental que o atrito seja o menor possível,
como no caso da patinação no gelo, onde os movimentos ocorrem graças ao
reduzido atrito entre as lâminas dos patins e a superfície do gelo. O peso do
patinador, concentrado todo nas lâminas, exerce uma pressão sobre o gelo
derretendo-o e formando uma pequena camada de água entre as lâminas e a
superfície do gelo. Dessa forma o atrito torna-se muito pequeno, facilitando o
movimento do patinador.
Mesmo objetos aparentemente lisos, como um vidro, uma mesa envernizada ou a superfície de um
automóvel, possuem muitas saliências e "buracos" no nível microscópico. Quando um objeto é colocado
sobre uma superfície (um tijolo sobre a mesa, por exemplo), ele tem na verdade, somente alguns pontos
de contato com ela, devido a essas saliências. A figura ao lado ilustra numa escala muito ampliada a
existência de tais saliências e o que acontece quando as superfícies de dois objetos entram em contato.
Uma teoria que explica a existência do atrito afirma que nos pontos onde as saliências se justapõem,
ocorrem fortes adesões superficiais, semelhante a uma espécie de solda entre os dois materiais. Desse
modo a força de atrito está associada à dificuldade em romper essas soldas quando um corpo é arrastado
sobre o outro.
Imaginemos um bloco sobre uma mesa horizontal, como mostra a figura abaixo. Se aplicarmos uma
força horizontal externa Y ao bloco, agindo para a direita, o bloco ficara estacionário se Y tiver módulo
muito grande. A força impede o movimento do bloco, e que atua para a esquerda, é a força de atrito, ^.
Enquanto o bloco estiver em equilíbrio, essa força de atrito é denominada força de atrito estático, ^_ .
Se o modulo de Y aumentar, o bloco, em certo instante, principia a deslizar. Quando o bloco estiver
quase deslizando, `a é um máximo. Sendo X maior que Xa,BáD , o bloco se move e acelera para a direita.
Estando o bloco em movimento, deslizando, a força de atrito retardadora é menor que Xa,BáD . Quando o
bloco se movimentar, a força retardadora será a força de atrito cinético, `c .
20
Fe, máx
0
Se a força aplicada desaparecer, a força de atrito que atua para a esquerda irá desacelera o bloco,
que acaba ficando em repouso.
Na pratica, verifica-se que não só Xa,BáD , mas também `c , são proporcionais à força normal que atua
sobre o bloco. As observações experimentais se resumem nas seguintes leis de atrito:
1. A força do atrito estático entre duas superfícies em contato é oposta à força aplicada e pode ter
valores dados por
`a d μa f
(4.4)
onde a constate adimensional μa é o coeficiente de atrito estático e g é a força normal. O sinal de
igual, na Equação 4, vale quando o bloco está a pique de iniciar o deslizamento, isto é, quando Xa Xa,BáD μa f. A desigualdade prevalece quando a força aplicada é menor que esse valor.
2. A força do atrito cinético atuando sobre um corpo tem direção oposta à do movimento e está
representada por
`c μc f
(4.5)
onde μc é o coeficiente de atrito cinético.
3. Os valores de μa e de μc dependem da natureza das superfícies, mas μc é, em geral, menor que μa .
Os valores típicos de μ estão entre cerca de 0,05, em superfícies lisas, e 1,5 em superfícies rugosas.
21
4.6-Aplicações
a) Consideremos uma partícula de massa m colocada em um plano inclinado (sem atrito) de inclinação θ:
Além da força peso h VP, atua sobre a partícula a reação de contato f devido ao seu contato com o
plano. Em geral, a reação de contato pode ter componente tanto na direção normal ao plano como na
direção tangencial.
Logo, o efeito do plano inclinado é reduzir a aceleração da queda livre por um fator igual ao ângulo de
inclinação, X VPRij.
b) Consideremos um objeto (que possa ser tomado como partícula) em equilíbrio com uma mesa: As
forças que atuam sobre o objeto são a força peso e a reação de contato da mesa f. Como o sistema
composto pelo objeto e pela mesa encontra-se em equilíbrio, temos: h f. Entretanto, embora sejam
iguais em módulo e tenham sentidos opostos, f não é reação à força peso (Figura a).
Figura a
Figura b
A reação h é a força h aplicada a Terra. A força f é a reação da mesa à força f com que o objeto atua
sobre a mesa. Logo, h f é conseqüência do equilíbrio (Figura b).
c) O pêndulo cônico: É uma partícula de massa V que gira em movimento
circular uniforme, descrevendo um circulo de raio M, suspenso por um fio de
comprimento k, de forma que o fio descreve a superfície de um cone de
22
ângulo de abertura , com Rij M/k. Seja l a velocidade angular do movimento circular uniforme.
As forças que atuam sobre a partícula são a força peso e a tensão no fio. A resultante Y mn o
destas duas forças, atuando sobre a partícula, tem que corresponder à força centrípeta. Vemos então que
este movimento mostra que:
JP X
Vl& M
l& M
VP
VP
P
d) A Máquina de Atwood: A montagem de duas massas desiguais, penduradas verticalmente por um
cordel fino e leve, que passa por uma polia sem atrito, como mostra a figura a, denomina-se máquina de
Atwood. O aparelho é usado em laboratório para medir a aceleração da gravidade.
Os diagramas de forças das duas massas aparecem na figura b, onde
admitimos V& p V . Quando se aplica a lei de Newton à massa V , com a
aceleração a para cima e para V& , tem-se
Quando se subtrai (2) de (1), obtemos
e) Determinação Experimental de μ_ : Nesse exemplo descrevemos um método simples de medição do
coeficiente de atrito estático entre um corpo e uma superfície áspera. Suponhamos que o bloco seja um
pequeno bloco colocado sobre um plano inclinado em relação ao plano horizontal, como mostra a figura
abaixo.
O ângulo do plano inclinado aumenta até a posição em que o bloco
principia a deslizar. Pela medição do ângulo c , em que se inicia o
deslizamento, obtemos imediatamente μa . Observemos que as únicas
forças que atuam sobre o bloco são, seu peso Vn, a força normal, g, e
a força do atrito estático, `a . Consideremos + paralelo ao plano e
normal ao plano, a segunda lei de Newton aplicada ao bloco dará
23
∑ XD VPRij `a 0
∑ XD f VPrsR 0
(4.6)
(4.7)
Podemos eliminar VP pela substituição VP f/cos de (2) em (1) para ter
Xa VPRij t
uvwx
Rij fJP
(4.8)
Quando o plano inclinado estiver no ângulo critico, c (denominado ângulo crítico de repouso), `a `i,Vá+ µif, e então, nesse ângulo, a equação (3) fica
µa f fJPc ⇒
µa = JPc .
4.7-Exercícios:
4.7.1 - (Unip-SP) Uma balança de farmácia(balança de mola) foi graduada em kg em um local onde g =
9,80 m/s2 . A balança é levada para um local onde g = 10,0 m/s2. Nesse novo local, uma pessoa de
massa 49 kg sobre na balança.
a) Qual a leitura na balança?
b) Qual o peso da pessoa nesse novo local?
4.7.2 – (UFMG - Adpatada) Na Terra, um fio de cobre é capaz de suportar, em uma de suas
extremidades, massas suspensas de até 60,0 kg sem se romper. Considere a acelração da gravidade, na
Terra, igual a 10,0 m/s2 e, na lua, igual a 1,50 m/s2.
a) Qual a intensidade da força máxima que o fio poderia suportar na Terra? E na Lua?
b) Qual a maior massa de um corpo suspenso por esse fio, na Lua, sem que ele rompa?
4.7.3 – Da cinemática a dinâmica (UFRN – Alterada) Um automóvel se desloca com velocidade v = 54
km/h (15 m/s); quando, a 18 metros de distância de uma faixa de pedestre, o motorista visualiza uma
senhora iniciando a travessia. Imediatamente, ele freia, e o automóvel pára, depois de ter percorrido
uma distância d.
24
Levando em conta essas condições,
a) Faça o diagrama de forças e determine o módulo da aceleração do automóvel;
b) calcule a distância, d, percorrida pelo automóvel até parar;
c) determine se o automóvel atingirá a referida senhora.
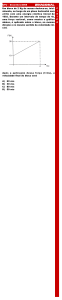
4.7.4 - (UFRN) Na correção ortodôntica de uma arcada dentária, foi passado, num dos dentes caninos,
um elástico. As extremidades desse elástico foram amarradas a dois molares, um de cada lado da
arcada, conforme a figura abaixo. A tensão no elástico é de 10,0 N e o ângulo formado pelas duas
partes do elástico é de 90º.
Nas figuras 1 e 2, estão representadas duas possibilidades para a direção e o sentido da força
resultante, FR , que está atuando sobre o referido dente canino.
Assinale a opção na qual se indica, corretamente, a figura que representa FR e o valor de sua
intensidade.
a) Figura 1 e 14,1 N
b) Figura 2 e 14,1 N
c) Figura 1 e 10,0 N
d) Figura 2 e 10,0 N
4.7.5 – (UFRN) Paulinho, após ter assistido a uma aula de Física sobre plano inclinado, decide fazer uma
aplicação prática do assunto: analisar o que ocorre com ele e sua tábua de morro (usada no “esquibunda”), ao
descer uma duna, inclinada de 30º em relação à horizontal e cuja extensão é de 40 m.
Inicialmente, Paulinho passa numa farmácia e verifica que a massa total, mT, do conjunto (isto é, sua massa
mais a massa da tábua) é de 60 kg. Sendo a tábua de fórmica, bastante lisa e lubrificada com parafina, ele
decide, numa primeira aproximação, desprezar o atrito entre a tábua e a areia da duna bem como a resistência
do ar.
Admitindo que, em nenhum momento da descida, Paulinho coloca os pés em contato com a areia,
considerando que a aceleração da gravidade é 10 m/s2 e lembrando que sen 30º = 0,5:
a) Faça o diagrama das forças externas que atuam no conjunto da figura abaixo, colocando essas forças no
centro de massa do bloco (Observe que, na figura, o bloco representa o conjunto, e o plano inclinado
representa a duna.)
25
b) Determine a velocidade, em m/s e em km/h, com que o conjunto (Paulinho com a tábua) chegará à base da
duna, supondo que ele tenha partido, do topo, do estado de repouso;
c) calcule o valor da força resultante que atua no conjunto.
d) indique se a velocidade com que o conjunto chegará à base da duna será maior, igual ou menor que a
velocidade determinada no subitem A, se o atrito entre a tábua e a areia for levado em conta. Justifique.
4.7.6 – Forças de interação: aplicação da Terceira Lei de Newton Dois blocos A e B de massas mA = 2,0
kg e mB = 3,0 kg estão juntos sobre um plano horizontal sem atrito. Uma força F = 10 N, paralela ao
plano, atua sobre A, que por sua vez empurra o bloco B, como indica a figura abaixo:
Determine:
a) a aceleração do conjunto;
b) a força que o bloco A exerce sobre o bloco B;
c) a força que o bloco B exerce sobre o bloco A;
4.7.7 - Em alguns parques de diversão, existe um brinquedo chamado ROTOR. O brinquedo consiste
basicamente em um cilindro com eixo vertical, em que as pessoas entram e encostam-se à parede. O
cilindro, passa, então, a girar com velocidade angular ω crescente. Atingida uma determinada
velocidade, o chão é baixado e as pessoas permanecem “grudadas” à parede do cilindro, conforme
nos mostra a figura abaixo.
Considere g a aceleração da gravidade e μ o coeficiente de atrito entre a pessoa e a parede do cilindro.
a) Faça o diagrama das forças externas que atuam na pessoa da figura abaixo.
b) Determine a menor velocidade angular que o cilindro com raio R deve desenvolver para que a
pessoa não escorregue.
4.7.8 – Na figura, o bloco B e o prato P pesam, respectivamente, 80 N e 1,0 N. O coeficiente de atrito
estático entre B e o plano horizontal de apoio vale 0,10 e desprezam-se os pesos dos fios e o atrito no
eixo da polia. No local, g = 10,0m / s 2 .
Dispõe-se de 20 blocos iguais, de 100 g de
massa cada um, que podem ser colocados
sobre o prato P.
a) Colocando-se dois blocos sobre P, qual
a intensidade da força de atrito exercida
em B?
b) Qual o número de blocos que deve ser
colocado sobre P, para que B fique na
iminência de se movimentar?
26
5. Conservação da Energia Mecânica e do Momento Linear
A física em geral aborda a natureza, assim, como as outras ciências da maneira que lhe apraz; sendo
a mesma construída através da história por muitas abordagens, em que trataremos aqui de uma
desenvolvida por Newton, conhecida como energia.
Várias perguntas poder ser feitas em relação a essa nova forma de encarar a natureza tais como, o
que é energia, a energia é destrutível ou criável, ela pode se transformar, como?
Newton desenvolveu um método que relaciona a energia a estados, fatos, situações em que os
sistemas físicos encontraram-se, tais como posição e movimento, e outros se basearam nesses conceitos
para desenvolver vários tópicos da física até os dias contemporâneos.
5.1-Energia
O que é energia? Esta pergunta decorre séculos e persiste em continuar apenas em
questionamento na mente dos físicos. Mas Newton não se importou em saber o que ela era; porém como
relacioná-la a que sua mente decifrava habilmente da natureza. Relacionou então energia com movimento
e posição para um dado sistema físico. Chamando de energia cinética a ligada a velocidade e energia
potencial a relacionada à posição.
5.2-Energia Cinética e Trabalho
A qualquer esforço físico ou intelectual para a realização de uma tarefa, dar-se o nome comumente
de trabalho.
Ao fato de provocar uma tensão em um sistema físico dar-se o nome de força e quando essa força
provoca movimento nesse sistema físico, a esse fato chama-se trabalho.
Percebemos então que o trabalho pode ser conceituado como a variação de um sistema físico no
esforço em relação a um eixo de coordenadas mediante uma força.
y Xz . ∆Mz Xz . {M]]]z| M]z~
}
(5.1)
Análise dimensional do trabalho. A unidade de trabalho no S.I. é Newton metro que é chamada
de joule. Logo,
PV&
1ski
R&
A força empregada nesse sistema pode ser constante ou variável, o que dependerá de como a
vizinhança modificará o estado anterior do sistema em estudo.
5.3-Teorema Trabalho-Energia
O trabalho total realizado por um agente externo implica na variação da posição do objeto, e a
mudança na posição por um parâmetro agora sim chamado tempo indica velocidade.
Ao analisarmos um corpo movendo-se ao longo do eixo x com aceleração constante, temos a
seguinte equação do movimento
27
A&& A & 2%D +& + (5.2)
A&& A &
%D 2+& + multiplicando pela massa V, teremos a segunda lei de Newton para a aceleração constante.
V%D V
A&& A &
2+& + XD +& + 1
1
VA&& VA &
2
2
yD & VA&& & VA &
(5.3)
Este é o teorema trabalho-energia, em que para analisar o trabalho realizado ou sofrido por um
sistema, basta mensurar a variação da energia desse sistema.
O recíproco também é válido. O trabalho realizado ou sofrido pelo sistema tem como conseqüência
a variação de sua energia cinética.
5.4-Energia Potencial
O que está relacionado a um objeto retornar a seu estado inicial de forma natural, por que objetos
inicialmente em repouso postos a uma determinada altura tendem entrar em movimento, por que um
objeto preso a uma mola volta a sua posição inicial quando distendida?
A estas tendências de movimento sem ação da vizinhança, Newton relacionou uma grandeza
definida energia potencial.
5.5-Energia Potencial Gravitacional
Quando um objeto inicialmente em repouso é solto de uma determinada altura com relação ao solo
ele entra em movimento até chegar ao solo e entrar novamente em repouso.
Este objeto é levado ao solo pela força gravitacional mediante a gravidade agindo no corpo.
Percebemos que ao soltar o objeto, imediatamente ele ganha velocidade implicando que parte desse
potencial tornou-se energia cinética, indicando diminuição da energia potencial gravitacional.
Se colocarmos este objeto em uma altura maior a gravidade agirá por mais tempo no mesmo,
provocando maior variação na energia cinética e conseqüentemente maior variação na energia potencial
gravitacional.
Essa variação na energia potencial gravitacional é igual a variação da energia cinética do objeto.
Então a soma dessas energias deve ser constante
rsjRJ%jJi
(5.4)
∆ ∆
0
∆ ∆
28
(5.5)
como o trabalho realizado é dado por
y ∆
logo,
y ∆
é o equivalente do trabalho energia potencial, para o caso em que somente a gravidade realiza trabalho.
De forma mais explícita
&
&
&
VA&& VA & VP@& @ &
(5.6)
5.6-Energia Potencial Elástica
Um sistema elástico é caracterizado pela capacidade de retornar a seu estado inicial quando
perturbado por uma força externa desde que suas características elásticas não sejam mudadas pela mesma
força. Para o sistema massa-mola abaixo.
Quando empregamos uma força externa a mola haverá como resposta na força restauradora
X + descoberta por Hooke que se comporta linearmente com a posição +. Para calcular o trabalho
realizado pela força de Hooke basta analisarmos o gráfico abaixo de acordo com a preposição anterior.
29
O trabalho é numericamente igual à área sob a curva
y ++ + &
&
&
(5.7)
e a equivalência trabalho-energia potencial elástica é para dois pontos distintos
y +&& + &
em que + e +& são os pontos final e inicial.
&
&
(5.8)
5.7-Forças Conservativas e Não-Conservativas
Uma força conservativa tem a característica de transformar energia cinética em potencial e viceversa, indicando processos reversíveis. Já forças não conservativa indicam processos irreversíveis.
O trabalho realizado por uma força conservativa tem quatro aspectos.
1 - É dado pela diferença entre o valor inicial e o valor final da função energia potencial.
2 - É reversível.
3 - É independente da trajetória do corpo e depende apenas do ponto inicial e do ponto final.
4 - O trabalho realizado ao longo de uma curva fechada é sempre zero.
5.8-Momento Linear
Notamos o momento linear através da 2ª Lei de Newton, que a força é diretamente proporcional a
variação do momento linear
]N
∆
B∆L
XN ∆EN ∆EN
]N
(5.9)
sendo essa grandeza definida por V , notamos então que quanto maior a massa e a velocidade,
maior a quantidade de movimento. O momento linear é uma grandeza vetorial que possui direção e
sentido da velocidade.
5.8.1-Conservação do Momento Linear
Consideraremos um sistema isolado formado por duas partículas A e B, em que A exerce uma força
sobre B, logo pela terceira Lei de Newton B também exerce uma força sobre A expressas da seguinte forma
e
XN"# ∆h]N#
∆JN
∆
XN#" ∆EN
]N
em que as taxas de variações do momento linear são iguais e contrárias,
30
(5.10)
∆
∆
∆ XN"# XN#" N N N 0
(5.11)
h]N h]N" h]N#
(5.12)
∆
XN"# XN#" N 0
(5.13)
]N
]N
∆E
]N
∆E
∆E
]N
de forma que a taxa de variação da soma vetorial h]N" h]N# é nula. Vemos então que a soma vetorial dos
momentos lineares de cada partícula é o momento linear total h]N.
e da equação (11) temos que
]N
∆E
a variação do momento linear total é zero, comprovando-se a constância do momento linear ou em outras
palavras ele é conservado.
5.9-Exercícios:
5.9.1 (UFRN 2009). A produção de energia proveniente de maré, sistema maré-motriz (no qual se utiliza o
fluxo das marés para movimentar uma turbina reversível capaz de converter em energia elétrica a energia
potencial gravitacional da água), constitui-se numa alternativa de produção de energia de baixo impacto
ambiental.
Um sistema desse tipo encontra-se em funcionamento na localidade de La Rance, França, desde 1966, com
capacidade instalada de 240 megawatts.
As figuras abaixo mostram, esquematicamente, um corte transversal da barragem de um sistema marémotriz, em quatro situações distintas, evidenciando os níveis da água, nos dois lados da represa (oceano e
rio), em função da maré.
31
As duas situações que permitem a geração de energia elétrica são:
a)
b)
c)
d)
I e IV
I e III
II e III
II e IV
5.9.2 (UFRN 2009). Visando à preservação do meio ambiente de forma sustentável, a sociedade atual vem
aumentando consideravelmente a utilização da energia dos ventos, através das turbinas eólicas. Nessa
tecnologia, a primeira transformação de energia acontece na interação das moléculas do ar com as hélices
dos cata-ventos, transformando a energia cinética de translação das moléculas do ar em energia cinética
de rotação das hélices.
Nessa interação,
a) a variação da quantidade de movimento das moléculas do ar gera uma força resultante queatua sobre
as hélices.
b) a variação do momento angular das moléculas do ar gera uma força resultante que atua sobre as
hélices.
c) a variação da força resultante exercida pelas moléculas do ar anula o momento angular das hélices.
d) a variação da força resultante exercida pelas moléculas do ar anula a quantidade de movimento das
hélices.
5.9.3 (UFRN 2008). Contrariando os ensinamentos da física aristotélica, Galileu Galilei (1564-1642) afirmou
que, desprezando-se a resistência do ar, dois corpos de massas diferentes atingiriam simultaneamente o
solo, se abandonados de uma mesma altura, num mesmo instante e com velocidades iniciais iguais a zero.
Para demonstrar experimentalmente tal afirmativa, em um laboratório de Física, duas
esferas de massas diferentes foram abandonadas de uma mesma altura, dentro de
uma câmara de vácuo, e atingiram o solo ao mesmo tempo. Do experimento realizado, pode-se concluir
também que as duas esferas chegaram ao solo
a)
b)
c)
d)
com a mesma velocidade, mas com energia cinética diferente.
com a mesma energia cinética, mas com velocidade diferente.
com diferentes valores de velocidade e de energia cinética.
com os mesmos valores de energia cinética e de velocidade.
5.9.4 (UFRN 2008). Recentemente, foi anunciada a descoberta de um planeta extra-solar, com
características
semelhantes às da Terra. Nele, a aceleração da gravidade nas proximidades da sua
superfície é aproximadamente 2g (g representa o módulo do vetor aceleração da gravidade nas
proximidades da Terra). Quando comparada com a energia potencial gravitacional armazenada por uma
represa idêntica construída na Terra, a energia potencial gravitacional de uma massa d’água armazenada
numa represa construída naquele planeta seria
32
a)
b)
c)
d)
quatro vezes maior.
duas vezes menor.
duas vezes maior.
quatro vezes menor.
5.9.5 (UFRN 2008). A Figura 1, ao lado, representa o martelo de massa M, de um bate-estaca, suspenso por
um cabo a uma altura h, em relação à superfície superior do êmbolo de um pistão. Em determinado
instante, o cabo é cortado, e o martelo cai livremente sobre o pistão. Com o impacto, o êmbolo do pistão
comprime adiabaticamente 2 moles de um gás ideal contidos no interior do pistão, conforme Figura 2,
também ao lado.
a) descreva as transformações de energia que ocorreram no sistema, considerando a evolução deste,
desde o momento em que o martelo é solto até o instante em que o êmbolo atinge a sua posição final
de equilíbrio;
b) calcule a variação de temperatura, ∆T, do gás, supondo que, no instante em que o martelo atinge o
êmbolo, 80% da energia deste é usada para comprimir o gás.
5.9.6 (UFRN 2007). Na praia de Rio do Fogo, no Rio Grande do Norte, está sendo implantada uma central
de energia eólica, como mostra a figura abaixo. Essa central terá 62 aerogeradores de 800 kW cada,
totalizando uma capacidade instalada de 49,6 MW.
33
Nesse caso, é correto afirmar que
a) o vento transfere quantidade de movimento linear para a hélice e, nesse processo, o momento de
inércia do vento é transformado em energia cinética de rotação da hélice.
b) o vento transfere quantidade de movimento linear para a hélice e, nesse processo, energia cinética de
translação do vento é transformada em energia cinética de rotação da hélice.
c) o vento transfere momento de inércia para a hélice e, nesse processo, energia cinética de translação do
vento é transformada em energia cinética de rotação da hélice.
d) o vento transfere momento de inércia para a hélice e, nesse processo, o momento de inércia do vento
é transformado em energia cinética de rotação da hélice.
5.9.7 Sabe-se que pela terceira lei de Newton, quando andamos empurramos a Terra para trás e ela, por
sua vez, nos empurra para frente. Usando a terceira lei de Newton ou o Princípio da Conservação do
Momento Linear explique porque não observamos a Terra se deslocar em sentido contrário ao nosso
movimento.
5.9.8 Um velho balde de carvalho com massa igual a 6.75Kg está pendurado em um poço na extremidade
da corda. A corda passa sobre uma polia sem atrito no topo do poço, e você puxa horizontalmente a
extremidade da corda para elevar lentamente o balde até uma altura de 4.0m.
a) Qual o trabalho realizado pela sua força ao puxar o balde para cima?
b) Qual o trabalho realizado pela força ao puxar o balde para cima?
c) Qual o trabalho total realizado sobre o balde?
5.9.9 A massa do próton tem 1836 vezes a massa de um elétron.
a) Um próton está se deslocando a uma velocidade v. A qual velocidade escalar um elétron teria a mesma
energia cinética do próton?
b) Um elétron possui energia cinética K. Se um próton possui a mesma velocidade escalar do elétron, qual
a sua energia cinética em termos de K?
5.9.10 Certo dia uma escaladora de montanhas de 75kg sobe do nível de 1500m de um rochedo vertical
até o topo a 2400m. No dia seguinte ela desce do topo até a base do rochedo, que esta a uma elevação de
1350m. Qual é a variação da energia potencial gravitacional dela
a) no primeiro dia e
b) no segundo dia.
34