Sumário
Sistemas Robóticos
◊ Sensores
◊ Actuadores
Sensores e Actuadores
Carlos Carreto
Curso de Engenharia Informática
Ano lectivo 2003/2004
Escola Superior de Tecnologia e Gestão da Guarda
Sensores
O que é um sensor?
É qualquer dispositivo que permite ao robô aperceber-se do seu estado de
funcionamento e do meio ambiente que o rodeia.
Tipos de sensores:
Contacto
Luz
Posição
Orientação
Velocidade
Aceleração
Proximidade
Presença
Temperatura
Som
Força
...
Sensores de contacto
Interruptores
Existem vários tipos de mini e micro
interruptores que podem ser usados
como sensores de contacto.
Por outro lado é muito fácil
construir este tipo de sensores de
uma forma caseira, onde o limite é a
nossa imaginação. São baratos,
simples de usar e robustos. Só
gastam energia quando o contacto é
establecido Funcionam por contacto
o que para algumas aplicações pode
ser uma desvantagem.
1
Sensores de posição e orientação
Sensores de posição e orientação
Potenciómetro
Encoders
Podem ser lineares ou de revolução.
Oferecem uma relação linear ou
logarítmica entre a posição e a
resistência. Por exemplo, ao rodar o
potenciómetro 1/4 de volta, a
resistência entre o terminal
extremo mais próximo e o terminal
do centro é 1/4 da resistência entre
extremos. São relativamente
baratos e simples de usar. Alguns
são pouco exactos e têm pouca
resolução
Podem ser incrementais ou
absolutos. Medem a rotação angular
de um eixo. Podem ser usados para
determinar a posição e/ou a
velocidade de eixos. Usados também
para indicar o número total de voltas
de eixos (odómetros). Podem ter
resoluções muito altas, não
necessitam de contacto mecânico,
permitem repetir resultados e são
fácies de construir de forma
caseira. São relativamente caros.
www.sensorsmag.com/articles/ 1198/enc1198/main.shtml
Sensores de posição e orientação
Encoders
Sensores de posição e orientação
IR Beacon
www.seattlerobotics.org/ encoder/200109/dpa.html
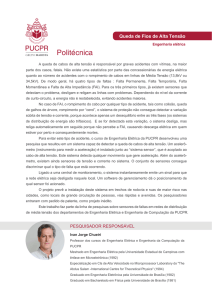
Estes dispositivos quando usados aos pares
permitem determinar a orientação de um deles em
relação ao outro. Cada dispositivo tem 4 emissores
e 4 receptores de IV estrategicamente
posicionados de modo a definirem 4 direcções (N,
S, E, W). Os dispositivos estão constantemente a
alternar o seu funcionamento entre emissão e
recepção do sinal de IV. Assim, quando um
dispositivo muda a sua orientação em relação ao
outro, o sensor que estava na direcção do outro
dispositivo, deixa de receber o sinal de IV e o
sensor que fica na direcção do outro dispositivo
passa a receber o sinal. A orientação de um
dispositivo em relação ao outro é assim
determinada pelo sensor que estiver a receber o
sinal em dado momento.
http://www.pololu.com/products/pololu/0001/
2
Sensores de posição e orientação
Sensores de presença
CMPS03 Magnetic Compass
Piroelectricos
Voltage - 5v only required
Current - 20mA Typ.
Resolution - 0.1 Degree
Accuracy - 3- 4 degrees approx. after calibration
Output 1 - Timing Pulse 1mS to 37mS in 0.1mS increments
Output 2 - I2C Interface, 0-255 and 0-3599 SCL speed up to
1MHzSmall
Size - 32mm x 35mm
São sensíveis ao calor em forma de
radiação infravermelha. São úteis
para detectar o corpo humano. São
baratos, simples de usar e robustos,
mas normalmente é necessário haver
movimento para detecção continua.
bearing var word
main:
pulsin 8, 1, bearing ' Obter a leitura
bearing = (bearing-500)/50 ' Converter para graus
debug 2,1,1, "Compass Bearing ", dec3 bearing
goto main
http://www.robot-electronics.co.uk/shop/Compass_CMPS032004.htm
Sensores de proximidade
Sensores de proximidade
Sensores de infravermelhos
Sensores de infravermelhos
São normalmente de dois tipos:
transmissivos e reflectivos. Ambos
são constituídos por um emissor e
um detector de luz infravermelha. A
diferença está no caminho que a luz
segue. Nos transmissivos a luz
emitida pelo emissor dirige-se
directamente para o receptor,
enquanto que nos reflectivos a luz é
reflectida por um objecto antes de
chegar ao receptor. Ambos podem
ser usados para detectar a presença
de objectos.
Os do tipo reflectivo podem ser
usados para medir distâncias. A
medição pode ser feita de 3
maneiras distintas: tempo de voo,
força do sinal recebido ou
triangulação. A primeira é
complicada de implementar em
sensores de IV devido à velocidade
da luz, a segunda depende da
superfície dos objectos e a terceira
é a mais comum e fácil de
implementar.
3
Sensores de proximidade
Modelação do sinal de infravermelhos
Sensores de proximidade
Sensores de IV Sharp GP2*
Normalmente a luz IV emitida pelo emissor é
modelada a uma determinada frequência e o
receptor apenas responde à luz recebida nessa
mesma frequência.
O circuito ao lado pode ser construído com o
emissor de IV D1 que emita luz com um
comprimento de onde da 980nm, por exemplo. O
receptor T1 deverá ter um filtro óptico que deixe
passar luz apenas com esse mesmo comprimento de
onda e terá também um filtro electrónico que
permita apenas passar luz modelada a 38kHz. Por
outras palavras, o receptor só responde a luz
infravermelha que pisque 38.000 vezes por segundo.
Este método evita interferências provocadas por
fontes externas de IV como o sol (0Hz) ou as luzes
das casas (120 Hz).
Sensores de proximidade
Sensores de proximidade
Sensore Sharp GP2D02
Sensor de ultra-sons
http://www.acroname.com/robotics/info/examples/GP2D02-4/GP2D02-4.html
Medem a distância a que se encontra um
objecto. Um circuito transmissor emite
sinais acústicos com uma frequência típica
de 50kHz (ultra-sons). Estes sinais ao
chocarem com objectos provocam ecos que
são captados por um circuito receptor. A
distância a que se encontra o objecto é
proporcional ao tempo que decorre entre a
transmissão do sinal e a recepção do eco
correspondente. Este tipo de sensor
acústico é mais preciso do que o sensor de
IV. Existem no mercado vários exemplares
de diferentes marcas.
4
Sensores de proximidade
Sensor de ultra-sons SRF04
Voltage - 5v only required
Current - 30mA Typ. 50mA
Max.Frequency - 40KHz
Max Range - 3 m
Min Range - 3 cm
Sensitivity - Detect 3cm diameter broom handle at > 2 m
Input Trigger - 10uS Min. TTL level pulse
Echo Pulse - Positive TTL level signal, width proportional to range.
Small Size - 43mm x 20mm x 17mm height
Sub Main()
Const EchoPin As Byte = 14 ' Define porta a usar
Const TrigPin As Byte = 13
Dim Range As Integer
Call PutPin(EchoPin, bxInputTristate)
Call PutPin(TrigPin, bxOutputLow)
do
Call PulseOut(TrigPin, 10, 1) ' impulso de disparo de 10uS
Range = PulseIn(EchoPin, 1) \ 54 ' 54 para Cm 137 para polgadas
Debug.Print "Range is "; CStr(Range)
Call Delay(0.1) ' esperar 100mS antes do próximo ping (minimo 10mS)
loop
End Sub
Sensores de proximidade
Sensores Capacitivos
Estes sensores geram um campo electrostático que reage às
alterações de capacitância provocadas pela presença de
objectos. A grande desvantagem deste tipo de sensores é
que a sensibilidade dos mesmos depende das propriedades
dialécticas dos objectos.
Sensores Indutivos
Têm um princípio de funcionamento semelhante ao dos
sensores capacitivos, mas usam um campo electromagnético
em vez de electrostático. Têm como desvantagem estarem
limitados à detenção de objectos metálicos.
http://www.robot-electronics.co.uk/shop/Ultrasonic_Ranger_SRF041999.htm
Outros tipos de sensores
CMUCam
http://www-2.cs.cmu.edu/~cmucam/
Uma câmara que a 17 frames por segundo é
capaz de:
-> Identificar a posição e tamanho de um objecto
medir o histograma RGB ou YUV de uma região da imagem;
automaticamente identificar e seguir o primeiro objecto
visível
-> Seguir automaticamente um objecto através de um
servomotor ligado directamente
-> Enviar a imagem capturada através da porta série
Outros tipos de sensores
Reconhecimento de fala
Características típicas:
-> Componentes externos mínimos
-> Reconhecimento de dezenas de palavras ou frases
-> 99% de precisão no reconhecimento
-> Reconhecimento de frases com 2 a 3 segundos de duração
-> Fácil de usar
-> Fácil de configurar
-> Enviar um bitmap com a forma do objecto detectado,
através da porta série.
http://www.sensoryinc.com/
5
Circuitos úteis
Multiplexer
Quando o número de entradas do
controlador não chegar podemos
usar um multiplexer como o 74150
para conseguir mais entradas.
O 74150 permite obter 16
entradas usando apenas 4 portas
do controlador.
Actuadores
É qualquer dispositivo que permite ao robô actuar no meio em que se encontra (moverse, pegar em objectos, emitir som, comandar aparelhos, etc).
Tipos de actuadores:
Motores eléctricos
Cilindros pneumáticos
Altifalantes
...
Motores de corrente continua
Motores de corrente continua
Os motores CC são ideais para a construção de robôs
móveis uma vez que são pequenos, relativamente
baratos, razoavelmente eficientes e fáceis de controlar.
São dispositivos que convertem energia eléctrica em
energia mecânica. A corrente eléctrica circula por
bobinas montados num rotor. Isto faz com que as
bobinas criem campos magnéticos que reagem aos
campos magnéticos dos ímans permanentes que se
encontram a rodear essas bobinas. Estes campos
magnéticos atraem-se e repelem-se continuamente
fazendo o rotor girar.
Propriedades
A eficiência de um motor é prejudicada pela fricção das
peças moveis, pelo que parte da energia eléctrica é
perdida em forma de calor. Os Motores CC dos
brinquedos têm uma eficiência de 50% enquanto que
Motores CC industriais podem ter uma eficiência de
90%
Tenção Nominal -É a tensão de alimentação recomendada do motor.
A maioria dos motores pode funcionan a tenções inferiores à recomendada,
embora com menos potência. Também podem funcionar a uma tensão
superior, mas tendo como consequência a diminuição do tempo de vida do
motor.
Corrente - Quando a tensão de alimentação for constante, o motor
consome uma corrente que é proporcional ao trabalho que realiza.
A corrente consumida será mínima quando o motor roda sem carga e será
máxima quando a carga for tanta que faz com que o motor não rode.
Força - É a força rotacional que o motor consegue fornecer a uma certa
distancia do eixo. É uma consequência directa da reacção electromagnética
que faz girar o rotor.
Potência mecânica - É o produto da Força pela velocidade angular do
rotor. Notar que se não houver carga, o motor tem uma velocidade angular
máxima, mas a Força é zero pelo que a potência também é zero. O mesmo
acontece se a carga for tão grande que faz o motor parar. Nesse caso a
Força é máximo, mas a velocidade angular é zero e a potência é novamente
zero. Entre estes dois extremos a potência de um motor é caracterizada
por uma relação parabólica.
6
Motores de corrente continua
Motores de corrente continua
Potência mecânica
Engrenagens Redutoras
Uma roda dentada pequena, ao fazer rodar uma maior:
T=F.r=m.g.r
Pm = T . ω
Aumenta a força de rotação
Diminui a velocidade
Potência eléctrica
Redução de 3 para 1
A potência aplicada à roda dentada de 8 dentes provoca
uma redução de velocidade de 1/3 e aumenta a força de
rotação 3 vezes, na roda dentada de 24 dentes.
V = R . I + L dI/dt + e
Pe = I . V
Redução de 9 para 1
Ao colocar duas reduções de 3:1 em série, obtém-se uma
redução de 9:1. A redução total resulta da multiplicação
de cada par de reduções. Este tipo de engrenagens é
muito usado para transformar a elevada velocidade e
pequena força de rotação dos Motores de CC em
velocidade e forças de rotação úteis.
Motores de corrente continua
Motores de corrente continua
Motor CC
Código RS
323-4846
323-4852
Potencia nominal (W)
2
2
Tensión nominal (V)
Correspondente engrenagem planetária
6
12
Tensión nominal máx.
12
21
Velocidad sin carga (rpm) a la tensión máx.
12.200
13.600
Par de parada (mNm)
4,78
5,23
Velocidad (rpm) a la tensión máx.
6.100
7.771
12.700
Exemplo do calculo da potencia de um par de motores
Dados do problema
• O peso do robô deve ser aproximadamente 1kg;
• Deve ser capaz de subir rampas com 30º de inclinação a uma velocidade constante de 20m/s;
• Deve ter dois motores iguais para uma plataforma de direcção diferencial;
• O coeficiente de fricção das rodas com o solo é µ = 0.3.
Velocidad máx. permisible (rpm) a la tensión máx.
12.700
Corriente sin carga (mA)
9,5
6,5
Corriente máx. continua (mA)
244
154
Par máx. continuo (mNm)
9,19
14,40
Fapp = µ.FN + Ff = µ.m.g.cosθ + m.g.senθ
long. del cuerpo
25,4
25,4
long. del eje
6,1
6,1
A potência mecânica é:
Ø del cuerpo
16
16
Ø del eje
1,5
1,5
terminales
2,8×0,4
2,8×0,4
Dimensiones (mm)
tipo
código RS
1-4
5-9
10+
6V nom.
323-4846
precio unitario
39,22 €
37,62 €
35,99 €
12V nom.
323-4852
44,34 €
42,53 €
40,69 €
Considerando a velocidade constante:
Pm = Fapp.v = m.g.v.(µ.cosθ + senθ)
Substituindo as variáveis pelos dados do problema:
Pm = 1.5W
Potência de cada motor = 0.75W
7
Motores de corrente continua
Engrenagens
Actuadores
Tipos de engrenagem
Os Motores CC são dispositivos com velocidade elevada e força de rotação
pequena, no entanto os mecanismos dos robôs requerem velocidades
pequenas e forças de rotação elevadas.
As engrenagens são usadas para trocar velocidades elevadas por mais força
de rotação.
A força de rotação gerada no centro de uma engrenagem é dada por
T=Fxr
Onde F é a força aplicada perpendicularmente e r é o raio da engrenagem.
Actuadores
Tipos de engrenagem
www.tamiya.com
Motores de corrente continua
Controlo Electrónico – Ponte-H
Quando DIR-L=0, DIR-R=1 e ENABLE=1: Q1 e Q4 estão ligado e a corrente circula pelo motor da
esquerda para a direita.
Quando DIR-L=1, DIR-R=0 e ENABLE=1: Q2 e Q3 estão ligado e a corrente circula pelo motor
da direita para a esquerda.
Quando DIR-L=1 e DIR-R=1: Q2 e Q4 estão ligados e o motor trava.
8
Sensores de proximidade
Dual H-Bridge Motor Driver
http://www.lynxmotion.com/dhb.htm
Driver type = L298 IC
Chip rated voltage = 46 vdc max
Chip rated current = 2 amps max
DHB Motor voltage = 20 vdc max
DHB Motor current = 1 amp max
I/O required = Four TTL level lines (outputs)
Supply capacitance = 330uF 20v
Logic voltage = 5vdc regulated
Onboard regulator = None
Current requirements (5v) = 36mA
Servomotores
Motores de corrente continua
Controlo Electrónico – PWM
A técnica PWM (Pulse With Modulation) consiste em ligar e desligar rapidamente o circuito que
alimenta o motor. Por exemplo, actuando no sinal ENABLE da Ponte-H.
O Duty Cycle representa a percentagem de tempo que o circuito que alimenta o motor fica
ligado. Quanto maior for o Duty Cycle maior é a velocidade do motor.
Servomotores
Os servomotores são Motores CC que giram apenas até uma determinada posição.
Controlo Electrónico - PWM
São formador por:
O sinal de controle enviado ao servo indica a posição desejada.
Motor CC
Engrenagem Redutora
Sensor de Posição
Circuito Electrónico de controle
Este sinal é comparado com um sinal de feedback que indica a posição actual medida pelo sensor
de posição.
São muito usados em aplicações de Radiomodelismo para controlar a orientação de rodas, lemes, etc.
É gerado um sinal de erro que é usado para ajustar a posição do motor.
A ligação eléctrica consiste normalmente em três fios: Tensão, Massa e Linha de Controle.
A tensão de alimentação ronda os 6V.
9
Servomotores
Servomotores
Controlo Electrónico - PWM
Transformação para rotação continua
O sinal de controle usa PWM para representar a posição
desejada.
Um servomotor roda o seu eixo no sentido horário e antihorário de uma ângulo tipicamente igual a 180º.
No entanto, enquanto que no controle de velocidade o sinal
PWM representava a percentagem de tempo do Duty Cycle,
no caso dos servomotores o sinal PWM é uma representação
da posição desejada.
Um servomotor pode ser facilmente modificado para que
rode continuamente como um Motor CC normal. Nesse caso o
sinal de controle especifica a velocidade e direcção de
rotação, em vez da posição angular desejada.
Diferentes comprimentos de onda representam diferentes
posições.
A modificação do servo é feita substituindo o potenciómetro
que serve de sensor de posição por um par de resistências
fixas, que simulam a posição central do potenciómetro.
Quando o sinal de controle se desviar do centro o circuito
electrónico do servomotor tentará em vão, controlar o
motor para o fazer voltar à posição central. Como resultado,
o servomotor roda continuamente com uma direcção e uma
velocidade controlada pelo sinal.
• 920 µs – posição limite no sentido anti-horário
• 1520 µs – posição central
• 2120 µs – posição limite no sentido horário
É também necessário remover um pequeno pino existente
numa das rodas dentadas, que serve de limitador mecânico à
rotação continua do servomotor.
De modo a que o servomotor tente continuamente atingir a
posição indicada pelo sinal de controle, o sinal de controle é
repetido a intervalos regulares, tipicamente entre 14 e 20
ms.
Servomotores
Plataformas móveis
Transformação do MX-400 para rotação continua
Desapertar os 4 parafusos na
base do servomotor e retirar
a tampa. Tomar nota da
posição de cada roda
dentada.
Eliminar o pequeno pino da
roda dentada maior para que
esta possa rodar livremente.
Usar um alicate de corte ou
um chizato.
Retirar a peça de plástico do
potenciómetro. Sem esta
peça, o potenciómetro não
será arrastado pela roda
dentada mais grande. Ligar o
servomotor a um controlador
de modo a que este envie o
sinal correspondente à
posição de repouso do
servomotor. Rodar
manualmente o potenciómetro
até que o motor pare.
Controlo da direcção
Montar as rodas dentadas
tendo cuidado em não mover
o potenciómetro. Colocar a
tampa e apertar os
parafusos.
10
Plataformas móveis
Controlo da direcção
Plataformas móveis
Geometria da plataforma
11