UNIVERSIDADE DE AVEIRO
DEPARTAMENTO DE ELECTRÓNICA TELECOMUNICAÇÕES E INFORMÀTICA
Sistemas e Controlo I – Aulas Práticas (2016/17)
Trabalho prático nº 2
Objectivos: Criação do modelo matemático do acelerómetro mecânico.
Representação do modelo através de Diagramas de Simulação.
Introdução ao SIMULINK. Implementação em SIMULINK de modelos de sistemas simples.
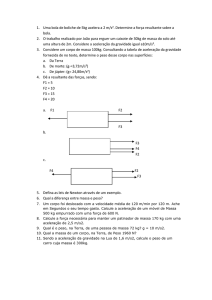
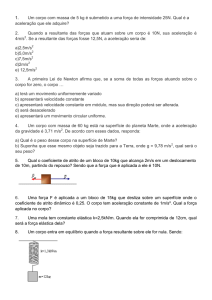
Ex.1 Considere o acelerómetro mecânico representado na Fig. 1 [A., Melo. Teoria dos sistemas de controlo
lineares, p.111]. O acelerómetro é um sensor-transdutor que mede a aceleração de um sistema em
movimento (por exemplo um veiculo). O acelerómetro é constituído por uma massa M, ligada ao sistema
móvel (cuja aceleração se pretende medir) através de uma mola com coeficiente de elasticidade k e um
amortecedor com coeficiente de atrito f. Supõe-se que o sistema móvel se desloca segundo a direcção x(t)
com aceleração a(t). Devido à sua inércia, a massa M sofre um movimento y(t) na direcção oposta que
provoca extensão da mola e é amortecido pelo amortecedor. y(t) é medido com um ponteiro numa escala
fixa no acelerómetro. Considere M=0.2 [kg], f=2.4 [Nsm-1], k = 6.4 [Nm-1].
Fig. 1
a) Determine a função de transferência entre o sinal observado y(t) e a aceleração do veiculo a(t),
considere que no momento inicial y(0)=0, y’(0)=0. (Sugestão: aplique a lei de Newton das forças
envolvidas).
b) Considere uma aceleração constante a(t)=A m/s2. Determine A em função do valor medido no regime
estacionário yss. (Sugestão: aplique o teorema do valor final).
c) Determine o diagrama de simulação (DS) do acelerómetro - forma canónica de Fase Variável.
d) Implemente o DS obtida na alínea anterior no SIMULINK e simule ao longo de 10 seg.. Considere que
durante os primeiros 3 seg. a velocidade do veiculo é constante (10 m/s) e depois começou acelerar
com 0.5 m/s2.
Ex. 2 Simule a resposta do RLC circuito do trabalho prático 1 ao longo de 20 seg. Considere que durante os
primeiros 10 seg. a tenção aplicada Vin(t) = 1 V e depois aumentou para 2 V.
a) Resolve o problema utilizando a função de Matlab lsim. Obtenha o traçado da resposta em frequência
(função bode).
b) Resolve o problema em Simulink onde o circuito é representado pelo bloco Transfer Fcn.
Apêndice 1: Sistemas mecânicos de translação
Lei de Newton: A soma de todas as forças que atuam num sistema mecânico de translação é nulo, ou de
outra forma, a aceleração linear de um dado corpo de massa M é igual a soma de todas as forças que lhe
são aplicadas (conforme as suas direcções):
∑ Fi = M
i
dv(t )
d 2 x(t )
=M
= Ma (t )
dt
dt 2
Forças inerciais num sistema mecânico de translação constituído por um corpo de massa M interligado a
uma mola e um amortecedor.
• A mola produz uma força de reacção elástica proporcional ao deslocamento x:
Fmola = kx ,
k- constante de elasticidade
• O amortecedor produz uma força de reacção (de atrito viscoso) proporcional à velocidade:
Fatrito = f
dx
, f -constante do amortecedor
dt
• A massa produz uma força de reacção inercial proporcional à aceleração:
Fmassa = M
d 2x
dt 2
Biblioteca de Simulink:
Continuous: Transfer Fcn
Sources: Step
Sinks: To Workspace
Commonly used blocks: Gain; Sum; Integrator; Scope