Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
DESENVOLVIMENTO DE UM MÓDULO DE CONTROLE DE NÍVEL UTILIZANDO
O KIT ARDUINO UNO
Carla M. M. dos Santos∗, Bruno L. G. Costa∗, Rodrigo A. Silva∗, Paulo R. Scalassara∗
∗
Universidade Tecnológica Federal do Paraná (UTFPR) - Campus Cornélio Procópio
Av. Alberto Carazzai, 1640 - Cornélio Procópio, Paraná, Brasil
Emails: [email protected], [email protected],
[email protected], [email protected]
Abstract— This paper describes the construction of a didactical platform with water reservoirs for application
of level control strategies, as well as the project of PI control using the Matlab software and the Arduino Uno
development kit. The goal is develop a supervisor that sends and receives command data from the plant,
through serial communication, allowing the display through a graphical interface. In addition, we seek to develop
an educational kit low cost that helps students in their learning and academic development.
Keywords—
Level Control, PI Control, Arduino Uno.
Resumo— Este artigo descreve a construção de uma plataforma didática com reservatórios de água para
aplicação de estratégias de controle de nı́vel, bem como o projeto de um controle PI a partir do software Matlab
e do kit de desenvolvimento Arduino Uno. O objetivo é desenvolver um supervisório que envie e receba dados de
comando da planta, através de comunicação serial, permitindo a visualização por meio de uma interface gráfica.
Além disso, busca-se desenvolver um kit didático de baixo custo que auxilie os alunos em seu aprendizado e
desenvolvimento acadêmico.
Palavras-chave—
1
Controle de Nı́vel, Controle PI, Arduino Uno.
Introdução
(UTFPR-CP), a fim de se criar kits didáticos que
possibilitem o projeto e o ensaio de diferentes estratégias de controle e linguagem de programação.
Como exemplo de outro trabalho desenvolvido na
linha de controle e que auxilia o ensino de alunos do curso de graduação em Engenharia Elétrica, tem-se o proposto por Bertachi et al. (2012)
e Almeida et al. (2012) que se refere ao desenvolvimento de um módulo didático de controle de
servomecanismo.
O crescimento industrial e o avanço da engenharia
de controle podem ser justificados pela possibilidade de se aplicar sistemas de controle a plantas
industriais e necessidade de se sofisticar os processos industriais (Ogata, 2005).
De acordo com Ogata (2005), na área industrial o controle eficiente e robusto de variáveis
como temperatura, pressão, nı́vel, umidade e vazão, por exemplo, garante o bom desempenho de
um processo automatizado já que essas variáveis
influenciam diretamente na qualidade dos produtos produzidos.
Diante disso, devido ao avanço em tecnologia
computacional e de dispositivos eletrônicos aliados
à eficiência na elaboração de códigos de controle,
o controle digital pode ser considerado a forma
mais empregada no desenvolvimento de projetos
de sistemas de controle em geral (Kuo, 1992).
Este artigo tem por objetivo implementar em
hardware/software um sistema de controle de nı́vel aplicado a uma estrutura formada por dois
tanques em acrı́lico, a partir do desenvolvimento
de um controlador PI embarcado no software Matlab. Esse software também será utilizado como
interface usuário-planta por meio do desenvolvimento de um supervisório. Além disso, espera-se
demonstrar o baixo custo do projeto em relação à
outros existentes no mercado, já que os materiais
utilizados apresentam baixo custo.
Importante ressaltar que em paralelo a este
projeto, outros sistemas de controle foram e estão
sendo desenvolvidos na Universidade Tecnológica
Federal do Paraná - Câmpus Cornélio Procópio
2
Controle PID
Controladores PID, atualmente, são uma das metodologias de controle mais empregadas no meio
acadêmico e industrial. Seu sucesso de aplicabilidade deve-se à suas caracterı́sticas exclusivas
como simplicidade estrutural e facilidade de sintonia.
Pesquisas estimam que mais de 90% das malhas de controle industriais empregam o controle
PID (Knospe, 2006). Com isso muitas pesquisas
foram e são desenvolvidas visando extrair o máximo de desempenho possı́vel desta metodologia.
Os principais temas de pesquisa estão atrelados com a busca por novas metodologias de identificação de sistemas e aprimoramento de regras
de sintonia (Li et al., 2006).
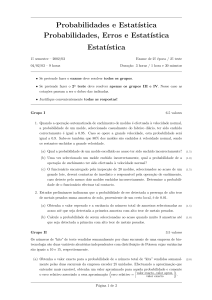
A Figura 1 ilustra a topologia de controle PID
em paralelo, que é usualmente a mais considerada. Todos os termos de controle, nessa estrutura, encontram-se combinados em ramos desacoplados, de modo que cada coeficiente possa atuar
de maneira independente. As Equações (1) e (2)
descrevem, respectivamente, a ação de controle
4091
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
para esta topologia e sua função de transferência
no domı́nio de Laplace.
P
r (t ) +
-
e(t )
K p e(t )
I Ki 0 e( )d
t
D
+
+
uc (t )
+
A identificação de um sistema, como o da
Equação (3), envolve a determinação de três parâmetros básicos: K (ganho em regime estacionário), L (atraso de transporte do sistema) e T
(constante de tempo).
Dentre alguns métodos que foram desenvolvidos para a identificação de um processo de primeira ordem estão: o de Ziegler-Nichols (Z-N ), o
de Smith e o de Sundaresan e Krishnaswamy, que
são baseados na resposta do processo ao degrau
unitário (Coelho and Coelho, 2004).
Após a identificação e modelagem matemática do processo, os métodos de sintonia podem
ser empregados para projetar um controlador PID
para o sistema. Uma das técnicas é a tentativa e
erro (do original trial-and-error ), baseada em chutes empı́ricos para os parâmetros do controlador,
até a obtenção de um conjunto de parâmetros que
contribuam para um desempenho satisfatório do
sistema. No entanto esta técnica apresenta problemas, como necessidade de inúmeros testes, às
vezes muito exaustivos, com gastos de tempo desnecessários.
Visando resolver este problema, regras de sintonia foram desenvolvidas, visando uma melhor
determinação de parâmetros. Dentre as principais
regras de sintonia descritas na literatura pesquisada, destacam-se as de Ziegler-Nichols (Z-N), de
Chien-Hrones-Reswick (CHR) e de Cohen-Coon
(Astrom and HÄgglund, 1995), geralmente aplicados caso a curva de resposta do sistema apresente
um formato em “S”.
Neste trabalho, resultados da aplicação de um
controlador PI no sistema considerado, serão ilustrados. Sendo assim, uma técnica de sintonia foi
abordada: o método de Ziegler e Nichols, detalhado a seguir.
y(t )
PLANTA
de(t )
Kd
dt
Figura 1: Estrutura PID em paralelo.
Z
t
uc (t) = Kp e(t) + Ki
e(τ )dτ + Kd
0
C(s) = Kp +
Ki
+ Kd s
s
de(t)
dt
(1)
(2)
onde os termos Kp , Ki = Kp /Ti e Kd = Kp Td
representam, respectivamente, os ganhos proporcional, integrativo e derivativo. Ti é a constante
de tempo integrativo e Td a constante de tempo
derivativo. O erro atuante do sistema e(t) é definido como e(t) = r(t) − y(t), onde r(t) e y(t) são,
respectivamente, os sinais de referência e de saı́da
do sistema.
Basicamente, o termo proporcional, como o
próprio nome sugere, atua proporcionalmente ao
erro atuante no processo (ou seja, quanto maior o
erro, maior a compensação gerada por este termo).
Sua principal caracterı́stica é acelerar a resposta
transitória do sistema, mas possui a desvantagem
de não eliminar o erro em regime estacionário. Por
sua vez o termo integrativo é proporcional à integral da área do erro atuante de controle. Devido
à presença de um polo na origem do plano complexo, essa ação de controle tende a reduzir os
erros estacionários do sistema (Johnson and Moradi, 2005). Já o termo derivativo, conhecido também como ação antecipatória, antecipa sua atuação em virtude de uma tendência incorreta do erro
de controle. No entanto, este termo possui algumas questões crı́ticas que tornam-o não aplicável
em casos práticos, como por exemplo, com relação a estabilidade, pois pode amplificar ruı́dos do
sistema (Li et al., 2006).
2.1
2.1.1
Ziegler and Nichols (1942) propuseram dois métodos para a sintonia de controladores PID, que
ainda hoje são muito utilizados. Ambos os métodos são baseados nas caracterı́sticas da resposta
transitória de um processo, e pretendem obter um
valor máximo de ultrapassagem de 25% na resposta ao degrau (Ogata, 2005). O considerado
aqui, primeiro método, leva em consideração a resposta do sistema em malha aberta para um sinal
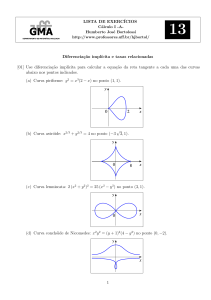
de teste em degrau unitário (Figura 2), caracterizado pela determinação de dois parâmetros. A
Figura 3 mostra um exemplo de uma curva obtida
de um sistema, submetido à um degrau. Os pontos que devem ser identificados no gráfico são: t1 ,
que é o ponto onde a linha tangente (traçada a
partir do ponto de inflexão da curva) toca o eixo
das abcissas (eixo do tempo) e t2 , o ponto onde a
linha tangente cruza com a linha contı́nua do ganho K. T é dado pela distância t2 − t1 e L = t1 .
Identificação de Sistemas e Regras de Sintonia
Alguns processos industriais são caracterizados
por funções de transferência, geralmente, de primeira ou de segunda ordem. Uma função de transferência de primeira ordem, como a do processo
considerado neste trabalho, pode ser representada
como na Equação (3):
G(s) =
Ke−Ls
Ts + 1
Método de Ziegler e Nichols (Z-N)
(3)
4092
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
baseados em equações diferencias aplicados os sistemas de controle analógico. No entanto, para serem implementados em um hardware digital, devese utilizar métodos numéricos aplicados à solução
de equações diferenciais que possibilitem, então, a
aproximação do sistema a uma equação de diferenças. A partir dessa equação de diferenças, que
depende da taxa de amostragem da conversão, se
define o comportamento do controle digital, permitindo o embarque de modelos de controladores
em dispositivos digitais.
Um dos métodos mais eficientes de aproximações por métodos numéricos de equações diferenciais é o Método de Euler Trapezoidal. Nesse
método, os pontos amostrados durante o perı́odo
Ts analisado são conectados por uma reta inclinada, formando um trapézio entre estes dois pontos. Tal método de discretização pode ser representado pela Equação (4).
Figura 2: Resposta de um processo para uma sinal
de teste degrau unitário.
Figura 3: Curva de resposta de um sistema em
malha aberta para uma entrada degrau.
ZKT
u(τ )dτ ≈
Uma vez que os parâmetros K, T e L foram
obtidos, utiliza-se a Tabela 1 para a obtenção dos
parâmetros do controlador, de acordo com a opção
do projetista.
(4)
(K−1)T
3
3.1
Tabela 1: Sintonia PID pelo Método 1 de ZieglerNichols (Z-N 1)
Controlador
Kp
Ti
Td
T
P
∞
0
KL
0,9T
L
PI
0
KL
0,3
1,2T
P ID
2L 0, 5L
KL
2.2
Ts
[u(k) + u(k − 1)]
2
Módulo de Controle de Nı́vel
Arduino Uno
Como já exposto, o presente artigo utiliza a plataforma de desenvolvimento Arduino Uno, ilustrado
na Figura 5, para implementação do controlador
de nı́vel.
Sistemas de controle de tempo discreto
Diferentemente do controle em tempo contı́nuo,
o controle digital trabalha com sinais de tempo
discreto obtidos do processo de amostragem (Kuo,
1992).
A estrutura básica de um sistema de controle
de tempo discreto em malha fechada é detalhada
na Figura 4.
Figura 5: Kit Arduino Uno.
O kit Arduino Uno é composto por microcontroladores do modelo ATmega328 de 8 bits,
tendo sua linguagem de programação facilitada já
que essa é muita próxima da linguagem C. Desta
forma, o kit pode ser programado de forma intuitiva, com as configurações de portas feitas de
forma rápida. Suas principais especificações estão
descritas na Tabela 2.
A estrutura básica de programação do kit envolve quatro etapas fundamentais: inclusão de bibliotecas, declaração de variáveis, laço void se-
Figura 4: Estrutura tı́pica de sistemas de controle
de tempo discreto.
2.3
Método de Discretização
Para o desenvolvimento de sistemas de controle
são utilizados os mesmos modelos matemáticos
4093
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
Com o objetivo de melhorar a planta já existente, fez-se algumas melhorias, tal como o aumento do volume de água admissı́vel por cada reservatório e confecção dos mesmos por materiais
com baixo custo.
Como atuador do sistema fez-se uso de uma
bomba CC de 12 V e 2 A que, devido a essas
caracterı́sticas, necessitou de um circuito de acionamento a parte para alimentá-la, bem como para
isolar eletricamente os circuitos por onde circulam
as altas correntes do circuito de comando.
Para o circuito de acionamento da bomba
utilizou-se uma placa de acionamento, conforme a
Figura 7, composta pelo CI L298N, do fabricante
ST Eletronics, composto por dois circuitos ponte
H independentes e comandados externamente por
seus respectivos pinos (Microeletronics, 2014).
Tabela 2: Especificações do Arduino Uno
Tensão de operação
Tensão de entrada
Entradas e saı́das
digitais
Entradas analógicas
Corrente CC por pino
de entrada e saı́da
Saı́das de tensão
Memória flash
SRAM
EEPROM
Velocidade de Clock
Conexão com PC
5 V cc
7 à 12 V cc (limitados
entre 6 e 20 V cc)
14 pinos (incluindo
6 pinos PWM)
6 pinos (A0 ao A5)
40 mA
3,3 V cc e 5 V cc
32 kB (0,5 kB dedicados
ao bootloader)
2 kB
1 kB
16 MHz
Via USB
tup() para determinação das condições de operação das portas digitais e analógicas e laço void
loop() para implementação da rotina principal do
código.
O ambiente de programação é disponibilizado pela fabricante Arduino, possuindo uma IDE
(Integrated Development Environment) executável
que se destina à elaboração e compilação dos programas no kit.
3.2
Figura 7: Placa de acionamento da bomba CC
composta pelo CI L298N.
Estrutura Fı́sica do Sistema de Nı́vel
Circuitos em ponte H se caracterizam por inverterem a rotação de motores de corrente contı́nua, desta forma, para o circuito utilizado no
projeto, foi necessário apenas uma das pontes H
existentes já que se fez uso de apenas um motor.
A construção dos reservatórios de água para implementação do controle de nı́vel foi baseada em
reservatórios já existentes na UTFPR-CP, conforme a Figura 6. Como pode-se observar, a
planta é composta por dois tanques dispostos um
sobre o outro, sendo que o controle de nı́vel é aplicado exclusivamente no tanque de cima, de forma
que o outro tanque é utilizado apenas como reservatório de água.
3.3
Sensor de nı́vel
Para obter-se as medidas de nı́vel do reservatório utilizado, optou-se por um sensor medidor de
distância por ultrassom HC-SR04.
O sensor escolhido, Figura 8, possui uma resolução de 3 mm e realiza medidas de distância
entre 2.5 cm à 4.3 cm, tendo os pinos ECHO e
TRIGGER como responsáveis por sua operação.
Figura 8: Sensor de nı́vel ultrassônico HC-SR04.
O pino TRIGGER recebe um pulso TTL de
10 us enviado pelo microcontrolador. Em seguida,
o transmissor do sensor envia um sequência de oito
Figura 6: Sistema de nı́vel de lı́quido do laboratório da UTFPR.
4094
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
pulsos ultrassônicos que, ao chegarem até o objeto
à sua frente, são refletidos e captados pelo receptor
sensor. Após isso, o HC-SR04 calcula o tempo
através da média dos tempos que cada um dos oito
pulsos leva para ir e voltar até o sensor. Com esse
valor médio, o pino ECHO é levado à condição de
nı́vel alto pelo mesmo tempo médio calculado. Por
fim, este pulso é enviado para uma porta digital do
microcontrolador que converte o tempo para uma
medida de nı́vel de água em centı́metros, através
da Equação (5).
D = Htan que −
3.4
Tmdio
58
3.5
Funcionamento da planta de nı́vel
O funcionamento geral do sistema de controle de
nı́vel pode ser representado pela Figura 10. Como
se observa, todos os elementos atuadores e sensores do sistema estão diretamente acoplados ao
Arduino Uno que desempenha a função de aquisição de dados e comando do atuador. Desta maneira, o Arduino Uno recebe os sinais do código
do Matlab e envia sinais de nı́vel, recebidos do
sensor, de volta para esse software, por meio de
uma comunicação serial. Desta forma toda planta
é comandada pelo supervisório montado.
(5)
Sistema supervisório da planta de nı́vel
Como dito, o trabalho envolve também a elaboração de uma interface usuário-planta, que foi elaborada a partir do software Matlab, mais precisamente em sua ferramenta especı́fica para desenvolvimento de interfaces chamada Guide.
A tela do supervisório é a interface entre o
usuários e os comandos da planta, sendo que o
supervisório também comanda toda a rotina de
códigos para ensaios em malha aberta ou malha
fechada. Na tela do supervisório existem comandos que devem ser adicionados diretamente pelo
usuário. Assim, o usuário deve selecionar o tipo de
ensaio que deseja realizar (malha aberta ou malha
fechada), inserindo após isso os valores de degrau
a serem aplicados na planta e o número de amostras que deseja. Por fim, basta pressionar o botão
INICIAR/PARAR ENSAIO.
Caso o usuário escolha a opção de ensaio em
malha fechada, deverá indicar os valores de ganhos Kp, Ki e Kd para o controlador, o número de
amostras e o valor de setpoint, devendo, por fim,
pressionar o botão INICIAR/PARAR ENSAIO.
Na Figura 9 tem-se a tela do supervisório,
sendo que o gráfico ao lado da tela mostra, em
tempo real, a resposta de nı́vel do sistema seja em
malha aberta ou malha fechada.
Figura 10: Diagrama de funcionamento do sistema de controle de nı́vel
4
4.1
Metodologia
Identificação da planta
A identificação da planta foi feita pelo software
Matlab, por meio da função ident do toolbox de
controle, que é dedicada a identificação de sistemas em geral.
Para iniciar a identificação, primeiramente
realiza-se o ensaio em malha aberta e obtém-se
a curva de reação da mesma quando submetida a
um degrau de entrada. Diante disso, fez-se um ensaio em malha aberta com um degrau de entrada a
uma tensão constante de 7 V aplicada na bomba
e 700 amostras, resultando em um nı́vel estável
de aproximadamente 3 cm. Por fim, obteve-se a
Figura 11 que mostra a curva do ensaio.
Figura 11: Curva de resposta ao degrau do sistema
de nı́vel em malha aberta
Figura 9: Tela do supervisório
Com os dados obtidos no ensaio em malha
aberta, pode-se determinar a função de transfe-
4095
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
rência G(s) por meio da função ident, como se
observa na Figura 12.
Figura 14: Tela de importação de dados.
Figura 12: Tela inicial da função IDENT do Toolbox de controle do Matlab.
Por fim, após todos os dados serem carregados, faz-se a modelagem do sistema por meio do
ı́cone process model, de acordo com a Figura 13.
Figura 15: Tela de importação de dados.
4.3
Com os dados obtidos na fase de sintonia do controle PI, pode-se aplicá-los na rotina de controle
por meio do supervisório da planta. Após isso,
realizaram-se ensaios em malha fechada com set
point para valores de nı́vel de 5, 10 e 15 centı́metros. Também foi inserido em cada ensaio uma
perturbação ao sistema causado pelo fechamento
e abertura da válvula de drenagem do tanque superior da planta.
Figura 13: Determinação do modelo da planta.
A função G(s) gerada pela função ident é
uma função de primeira ordem sendo descrita pela
Equação (6).
0.4357
(6)
6.436s + 1
Levando em consideração o pequeno atraso de
transporte presente na resposta em malha aberta,
adotou-se para a Equação 6 um valor de L = 0.4,
que levou à Equação (7) que representa a G(s)
que mais se aproxima do comportamento real da
planta.
0.4357e−0.4s
G(s) =
(7)
6.436s + 1
Por fim, a Figura 14 compara a resposta real
do sistema obtida pelo ensaio em malha aberta e
a resposta G(s) identificada, ambas com o mesmo
valor de degrau de entrada.
G(s) =
4.2
Aplicação do controle PI
5
Resultados
As Figuras 16, 17 e 18 fornecem os resultados dos
ensaios em malha fechada para os valores de set
point de 5, 10 e 15 centı́metros. Como se observa
em cada um dos ensaios em malha fechada teve-se
uma perturbação causada pelo fechamento e abertura da válvula de drenagem do tanque superior
da planta.
A análise das figuras acima demonstra que a
planta conseguiu reagir bem ao controle, tendo resultados satisfatórios, que demonstram a eficiência
do controle PI projetado.
Como proposto, outro objetivo do projeto era
a construção de uma planta de baixo custo que pudesse ficar à disposição dos alunos da UTFPR-CP.
Isso pode ser comprovado pela Tabela 3 que relaciona cada componente utilizado na construção da
Sintonia do controle PI
Após a identificação satisfatória da planta, podese realizar a sintonia do controle PI. Para esse projeto utilizou-se o método de sintonia de Ziegler e
Nichols, obtendo-se como resultado: T = 0.636, K
= 0.4357, L = 0.4, que, por sua vez, resultaram
em Kp = 15 e Ki = 11.
4096
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
Tabela 3: Custos do Projeto
Descrição do componenete
Tanque superior em acrı́lico
Tanque inferior em acrı́lico
Duas válvulas globo niqueladas
Dois metros de mangueira
1 metro de cano tigre 1,5 mm
Três adaptadores de bronze 1/4”
Régua em acrı́lico
Bomba DC 12 V
Kit Arduino UNO
Shield L298N
Sensor ultrassônico HC-SR04
Total
Figura 16: Resposta em malha fechada para set
point de 5 centı́metros.
6
Valor
R$ 75,00
R$ 75,00
R$ 20,00
R$ 2,00
R$ 6,70
R$ 13,50
R$ 2,00
R$ 12,00
R$ 69,00
R$ 25,00
R$ 16,00
R$ 316,20
Conclusão
A análise do projeto proposto mostra que os objetivos foram atingidos e a construção fı́sica da
planta de nı́vel juntamente com sua automação,
resultou em um módulo didático eficaz de controle
de nı́vel.
Os resultados obtidos com o controlador PI
demonstraram-se satisfatórios, desde o processo
de identificação do sistema até a aplicação do
controle, o que permitiu um controle eficiente da
planta com um erro em regime permanente praticamente nulo. Frente às perturbações, o sistema
também mostrou-se robusto já que se recuperava
após a aplicação de uma perturbação, retornando
ao valor de set point desejado.
Portanto, o funcionamento da planta didática
ficou comprovado por meio dos resultados obtidos
que validaram a eficiência do kit como um todo,
permitindo que esse possa ser usado para trabalhos futuros já que fica a disposição da UTFPRCP.
Figura 17: Resposta em malha fechada para set
point de 10 centı́metros.
Referências
Almeida, J. P. L. S. d., Angélico, B. A., Endo, W.
and Vallim, M. B. R. (2012). Atualização tecnológica, identificação e sintonia da malha de
vazão de uma planta didática industrial, XIX
Congresso Brasileiro de Automática (CBA),
Campina Grande.
Figura 18: Resposta em malha fechada para set
point de 15 centı́metros.
Astrom, K. J. and HÄgglund, T. (1995). PID controllers, 2 edn, Instrument Society of America, Research Triangle Park.
planta bem como seus preços. Observa-se que o
gasto total foi de 316,20 reais, valor considerado
pequeno perto dos kits de controle de nı́vel disponı́veis no mercado. Neste ponto cabe ressaltar que
o preço da licença do Matlab não está incluso pelo
fato de a Universidade fornecê-la e o kit se destinar totalmente ao uso acadêmico. Além disso, o
alcance desse objetivo deve-se ao fato da utilização do Arduino Uno, que é um kit de baixo custo
e grande eficiência, além do baixo custo do sensor ultrassônico adotado e placa de acionamento
composta pelo CI L298N.
Bertachi, A. H., Angélico, B. A. and Neto, A. F.
(2012). Desenvolvimento de módulo didático de controle de servomecanismo, XIX
Congresso Brasileiro de Automática (CBA),
Campina Grande.
Coelho, A. A. R. and Coelho, L. d. S. (2004).
Identificação de sistemas dinâmicos lineares,
UFSC, Florianópolis.
4097
Anais do XX Congresso Brasileiro de Automática
Belo Horizonte, MG, 20 a 24 de Setembro de 2014
Johnson, M. A. and Moradi, M. H. (2005). PID
Control, Springer, Londres.
Knospe, C. (2006). Pid control, IEEE Control
Systems 26(1): 30–31.
Kuo, B. C. (1992). Digital Control Systems, Oxford University Press.
Li, Y., Ang, K. H. and Chong, G. C. Y. (2006).
Pid control system analysis and design, IEEE
Control Systems 26(1): 32–41.
Microeletronics, S. (2014). L298n dual full-bridge
driver datasheet.
Ogata, K. (2005). Engenharia de controle moderno, 3 edn, Pearson Prentice-Hall, Rio de
Janeiro.
Ziegler, J. G. and Nichols, N. B. (1942). Optimum
settings for automatic controllers, Transactions of the ASME (64): 759–768.
4098