MÉTODOS NUMÉRICOS PARA EQUAÇÕES DIFERENCIAIS PARCIAIS
2- Resolução de Sistemas
Não-lineares.
2.1- Método de Newton.
2.2- Método da Iteração.
3.3- Método do Gradiente.
2- Sistemas Não Lineares de Equações
Considere um sistema não linear de n equações com n
incógnitas.
f1 ( x1, x2 ,L , xn ) = 0
f1
x1
f
x
f
(
x
,
x
,
L
,
x
)
=
0
2 1 2
n
2
2
f(x)
0
f
x
ou
=
com
=
e
=
(1)
M
M
LLLLLLLL
f n ( x1, x2 ,L , xn ) = 0
fn
xn
Note que como caso particular podemos ter um sistema
linear de equações algébricas:
f1 ( x1 , x2 ,L , xn ) = a11 x1 + a12 x2 + L a1n xn − b1 = 0
f 2 ( x1 , x2 ,L , xn ) = a21 x1 + a22 x2 + L a2 n xn − b2 = 0
ou Ax − b = 0
LLLLLLLLLLLLLLLLLLL
f n ( x1 , x2 ,L , xn ) = an1 x1 + an 2 x2 + L ann xn − bn = 0
2.1- Método de Newton
Considere um sistema não linear de n equações com n
incógnitas.
f1 ( x1, x2 ,L , xn ) = 0
f1
x1
f
x
L
f
(
x
,
x
,
,
x
)
=
0
2 1 2
n
2
2
ou
f(x)
0
com
f
e
x
(1)
=
=
=
M
M
LLLLLLLL
f n ( x1, x2 ,L , xn ) = 0
fn
xn
Resolveremos este problema com aproximações sucessivas.
k
k
k
k
Seja a aproximação k com x = ( x1 , x2 ,L , xn ) sendo uma das
k
k
k
k
k
k
raízes de x com erro ∆x = ( ∆x1 , ∆x2 ,L , ∆xn ). Logo x = x + ∆x .
f(x k + ∆x k ) = 0
(2)
Supondo que f(x) é continuamente diferenciável num domínio
k
convexo que contem x e x podemos expandir a função em
k
série de potencia entorno do ponto x e desprezamos as
potencias maiores que 1 (termos não lineares).
2.1- Método de Newton
Linearização do sistema (2).
f(x) = f(xk + ∆xk ) ≈ f(xk ) + f '(xk )∆xk = 0
(3) ou
∂f1
∂f1
∂f1
k
k
k
k
k
k
f
(
x
)
≈
f
(
x
,
x
,
L
,
x
)
+
∆
x
+
∆
x
+
L
+
∆
x
1
1 1
2
n
1
2
n =0
∂x1 xk
∂x2 xk
∂xn xk
f (x) ≈ f ( x k , x k ,L , x k ) + ∂f 2 ∆x k + ∂f 2 ∆x k + L + ∂f 2 ∆x k = 0
n
n
2
1
2
1
2
2
∂
x
∂
x
∂
x
1 xk
2 xk
n xk
LLLLLLLLLLLLLLLLLLLLLLLLLLLL
∂f n
∂f n
∂f n
k
k
k
k
k
f n (x) ≈ f n ( x1 , x2 ,L , xn ) +
∆x1 +
∆x2 + L +
∆xnk = 0
∂x1 xk
∂x2 xk
∂xn xk
Devemos entender f '(x) como sendo a matriz Jacobiana das
funções f1 , f 2 ,L, f n com respeito as variáveis x1 , x2 ,L, xn .
2.1- Método de Newton
∂ f1
∂x
1
∂f 2
f '(x) = W (x) = ∂ x1
L
∂f n
∂ x1
∂ f1
∂x2
L
∂f 2
∂x2
L
L
∂f n
∂x2
L
L
∂ f1
∂xn
∂f 2
∂xn
L
∂f n
∂ x n
O sistema (3) é um sistema linear da forma:
∂ f1
f1 ( x )
∂ x1 x k
f ( x k ) ∂f 2
2
+ ∂ x1 x k
M
L
f n ( x k ) ∂ f n
∂ x1 x k
k
∂ f1
∂ x2
∂f 2
∂ x2
L
xk
L
xk
L
∂f n
∂ x2
L
L
xk
∆ x1k
xk
∂f 2 k
∆ x2
= 0 ou f(x k ) + W (x k ) ∆ x k = 0
∂xn x k
L
M
∂f n k
∆ xn
∂ x n x k
∂ f1
∂xn
2.1- Método de Newton
k
W(x
) é não singular, então possui inversa e segue
Se a matriz
W(x k ) −1[f(x k ) + W(x k )∆x k ] = 0 ⇒ ∆x k = − W(x k ) −1 f(x k ) logo
x k +1 = x k + ∆x k = x k − W(x k ) −1 f(x k ) com k = 0,1,2,...
Para a aproximação zero podemos escolher x 0 como um valor
estimado grotescamente para a raiz procurada.
Este é o Método de Newton e note que devemos calcular a
matriz inversa em cada passo: x k +1 = x k − W(x k ) −1 f(x k ) . Se a
matriz inversa W(x) −1 é continua na vizinhança da solução
procurada x* e a aproximação inicial x 0 é suficientemente perto
de x*, então podemos fazer a seguinte aproximação para obter
o Método de Newton Modificado:
W(x k ) −1 ≈ W(x 0 ) −1
x k +1 = x k − W(x 0 ) −1 f(x k )
2.1.1- Existência de Raiz do Sistema e Convergência do
Método de Newton
Teorema 1: Seja um sistema não linear de equações com
coeficientes reais, onde as funções f(x) são definidas e
continuas junto com suas derivadas parciais de primeira e
segunda ordem num domínio Ω . Ou seja, f(x) ∈ C 2 (Ω) .
f1
x1
f
x
f(x) = 0 com f = 2 e x = 2
M
M
fn
xn
0
0
Suponha x 0 e o fecho de sua vizinhança V (x ) = x − x m ≤ ∆x ⊂ Ω
serem pontos de Ω, onde m é a m-norma e as seguintes
condições serem válidas:
{
}
0
1) A matriz Jacobiana W(x) em x tem inversa W(x 0 ) −1 e
0 −1
W(x )
≤ A0 , com W(x )
0
m
m
1
= max
i
det( W(x 0 ))
n
∑W
j =1
ij
, W ij
são os cofatores
do elemento Wij
2.1.1- Existência de Raiz do Sistema e Convergência do
Método de Newton
2) W(x 0 )−1 f(x 0 ) ≤ B0 ≤ ∆x ,
m
2
n
3) ∑
k =1
∂ 2 fi (x)
≤ C com (i, j = 1,L , n ) e x ∈ V (x 0 ),
∂ x j ∂ xk
4) as constantes A0 , B0 e C satisfazem a desigualdade
µ 0 = 2nA0 B0C ≤ 1.
p +1
p
p −1
p
x
=
x
−
W(x
)
f(x
), p = 0,1, 2,...
Então o Método de Newton
converge para esta escolha de aproximação inicial x 0 e
x* = lim x p é a solução do sistema f(x) = 0 tal que
p →∞
x* − x 0
m
≤ 2B0 ≤ ∆x.
Note que, sempre que sejam verificadas
todas as hipóteses do teorema o método *
de Newton converge para uma solução x
0
que é raiz do sistema na vizinhança de x .
2.1.1- Existência de Raiz do Sistema e Convergência do
Método de Newton
2
Note que, se f(x) ∈ C (Ω) e o sistema f(x) = 0 tem em Ω uma
*
solução x segue que f(x* ) = 0 e W(x* ) ≠ 0 e as condições do
teorema são válidas para qualquer ponto x 0 suficientemente
perto de x*.
Por outro lado, para que a condição 2) seja válida é importante
observar que B0 fornece uma estimativa da diferença entre as
aproximações primeira e inicial. Desta forma podemos verificar
rapidamente se esta desigualdade é verificada assim que a
primeira aproximação seja calculada:
2)
0 −1
0
W(x ) f(x )
= x −x
1
m
0
m
∆x
≤ B0 ≤
.
2
Também, podem ser obtidos resultados de convergência
análogos aos anteriores para o caso em que a norma
ou
.
considerada é
l
k
2.1.1- Existência de Raiz do Sistema e Convergência do
Método de Newton
Definição de Taxa de Convergência para os Métodos
iterativos:
*
Dizemos que um método iterativo converge para a solução x
com taxa de convergência de ordem Q se a seguinte
desigualdade se verifica ∀ k > k
x
k +1
− x
*
específica
onde c não depende de
Taxa de
Convergência
Computacional
ρ
=
ln
ln
≤ c x
k
− x
*
Q
específica
x k.
k + 1
x
x
x
k
x
k
k −1
− x
− x
*
− x
*
*
específica
específica
− x
específica
*
específica
2.1.2- Unicidade da Solução do Método de Newton e Taxa
de Convergência e Estabilidade.
Teorema 2: Se as condições 1) a 4) do Teorema 1 são
verificadas, então existirá no domínio x − x 0 m ≤ 2B0 ≤ ∆x uma
única solução do sistema f(x) = 0 .
Teorema 3: Se as condições 1) a 4) do Teorema 1 são
verificadas, então a seguinte desigualdade se verifica para as
p
x
aproximações sucessivas
x* − x p
m
1
≤
2
p −1
( µ 0 ) 2 p −1 ( B0 )
*
*
onde x é a solução do sistema f(x ) = 0 e µ 0 = 2nA0 B0C ≤ 1.
Falta algum resultado que garanta a estabilidade da
convergência do Método de Newton quando varia a escolha da
aproximação inicial!
2.1.2- Unicidade da Solução do Método de Newton e Taxa
de Convergência e Estabilidade.
Teorema 4: Se as condições 1) a 4) do Teorema 1 são
verificadas e 2 B 0 C ≤ ∆x onde µ 0 = 2nA0 B0C < 1, então o Método
µ0
*
de Newton converge para sua única solução x do sistema f(x) = 0
no domínio x − x 0 m ≤ 2B0 ≤ ∆x para qualquer escolha da
aproximação inicial x 0 que pertença ao domínio x% 0 − x 0 ≤ 1 − µ 0 B0 .
2µ 0
m
Note que se 2B0 < ∆x e µ 0 < 1 então para a aproximação inicial x 0
sempre há uma vizinhança e qualquer ponto desta vizinhança
pode ser escolhido como aproximação inicial para que o Método
*
de Newton seja convergente para a solução procurada x .
Suponha 2 B0 < 2qB0 = ∆x com q > 1 fixe µ 0* = max( µ 0 ,1/ q ) logo pelo
0
%
teorema 1 e 4 o Método de Newton para qualquer aproximação inicial x
0
que verifique a condição x% − x 0
m
1 − µ 0*
≤
B0 será convergente para x* .
2 µ0
2.1.3- Exemplo 2 pag. 462 do Demidovich
Use o Método de Newton para encontrar a solução aproximada
positiva do sistema de equações: x 2 + y 2 + z 2 = 1
2
2
2
x
+
y
− 4z = 0
3x 2 − 4 y + z 2 = 0
começando com a aproximação inicial x0 = y0 = z0 = 0.5.
2
2
2
f
(
x
,
y
,
z
)
=
x
+
y
+
z
−1 = 0
1
Solução: Nosso sistema é
2
2
f
(
x
,
y
,
z
)
x
y
=
2
+
− 4z = 0
M é to d o d e N e w to n
2
2
2
x k +1 = x k − W (x k ) −1 f (x k )
f
(
x
,
y
,
z
)
3
x
4
y
z
=
−
+
=0
3
W (x) =
∂ f1
∂x
∂f2
∂x
∂f3
∂x
∂ f1
∂y
∂f2
∂y
∂f3
∂y
∂ f1
∂z
∂f2
∂z
∂f3
∂z
Para executar cada
aproximação devemos
calcular em cada passo
f (x k ), W (x k ) e W (x k ) −1
2.1.3- Exemplo 2 pag. 462 do Demidovich
2
2
2
f
(
x
,
y
,
z
)
=
x
+
y
+
z
−1 = 0
Solução: Nosso sistema é
1
2
2
f
(
x
,
y
,
z
)
=
2
x
+
y
− 4z = 0
x0 = y0 = z0 = 0.5.
2
2
2
=
−
+
=0
f
(
x
,
y
,
z
)
3
x
4
y
z
3
0
0
0
2
2
2
f
(
x
,
y
,
z
)
=
(0.5)
+
(0.5)
+
(
0.5)
− 1 = −0.25
−0.25
1
0
f (x ) = −1.25 = f 2 ( x 0 , y 0 , z 0 ) = 2(0.5) 2 + (0.5)2 − 4(0.5) = −1.25
−1.00 f 3 ( x 0 , y 0 , z 0 ) = 3(0.5) 2 − 4(0.5) + (0.5) 2 = −1.00
2 x
W (x) = 4 x
6 x
W (x 0 ) − 1
2z
1
2 y − 4 logo W (x 0 ) = 2
3
− 4 2 z
− 15 − 5 − 5
1
e x1 = x 0
=−
−
14
−
2
6
40
− 11 7 − 1
2y
1
1
−4
1
− 4 e det( W (x 0 )) = − 40
1
0.875
− W (x 0 ) −1 f(x 0 ) = 0.500
0.375
2.1.3- Exemplo 2 pag. 462 do Demidovich
Para a iteração 2 devemos calcular
1 1 1
2
2
2
f
(
x
,
y
,
z
)
=
(0.875)
+
(0.500)
+
(0.375)
−1 = 0.15625
0.15625
1
1
f (x ) = 0.28125 = f2 (x1, y1, z1) = 2(0.875)2 + (0.500)2 − 4(0.375) = 0.28125
0.43750 f3 (x1, y1, z1) = 3(0.875)2 − 4(0.500) + (0.375)2 = 0.43750
2 x 2 y 2 z
1.750 1 0.750
W(x) = 4x 2 y −4 logo W(x1 ) = 3.500 1
−4 e det(W(x1 )) = −64.75
6x −4 2z
5.250 −4 0.750
−3.75 −4.75
−15.25
0.78981
1
e x2 = x1 − W(x1 )−1 f(x1 ) = 0.49662
1 −1
W(x ) = −
−
23.625
−
2.6250
9.62
5
64.75
−19.25
0.36993
12.25 −1.75
e assim sucessivamente,
0.78521
0.00001
0.007279
note que a medida que
0.49662 f(x3 ) = 0.00004 f(x2 ) = 0.014511
3
x
=
aumenta o número de
0.36992
0.00005
0.021767
k
iterações f(x ) → 0
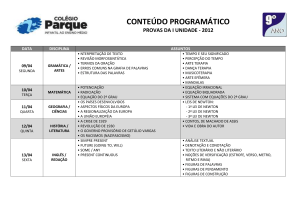
2.1.3- Exemplo 2 pag. 462 do Demidovich
Visualização gráfica do problema
Frase do Dia
“True Laws of Nature cannot be linear.”
Albert Einstein