UNIVERSIDADE FEDERAL DE OURO PRETO
ESCOLA DE MINAS
DEPARTAMENTO DE ENGENHRARIA DE CONTROLE E AUTOMAÇÃO
INSTRUMENTAÇÃO
Relatório: Caracterização de um LVDT como sensor
de posição linear
Aluna: Ana Cláudia de Oliveira
Ben-Hur Rodrigues
Edson Gomes Jr.
Warley Henrique
Ouro Preto
2009
Caracterização de um LVDT como sensor de posição linear:
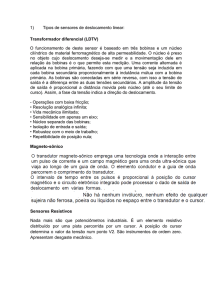
Os LVDT’s (Linear Variable Differential Transformer) são sensores para medição de
deslocamento linear. O funcionamento de deste sensor é baseado em três bobinas e um
núcleo cilíndrico de material ferromagnético de alta permeabilidade. Ele dá como saída
um sinal linear, proporcional ao deslocamento do núcleo, que está fixado ou em contato
com o que se deseja medir. A bobina central é chamada de primária e as demais são
chamadas de secundárias. O núcleo é preso no objeto cujo deslocamento deseja-se
medir e a movimentação dele em relação às bobinas é o que permite esta medição. Para
esta medição, uma corrente alternada é aplicada na bobina primária, fazendo com que
uma tensão seja induzida em cada bobina secundária proporcionalmente à indutância
mútua com a bobina primária. A freqüência da corrente alternada está geralmente entre
1 e 10 kHz. De acordo com a movimentação do núcleo, esta indutância mútua muda,
fazendo com que as tensões nas bobinas secundárias mudem também. As bobinas são
conectadas em série reversa, com isso a tensão de saída é a diferença entre as duas
tensões secundárias. Quando o núcleo está na posição central, eqüidistante em relação
às duas bobinas secundárias, tensões de mesma amplitude, porém opostas são induzidas
nestas duas bobinas, assim, a tensão de saída é zero. Quando o núcleo é movimentado
em uma direção a tensão em uma das bobinas secundárias aumenta enquanto a outra
diminui, fazendo com que a tensão aumente de zero para um máximo. Esta tensão está
em fase com a tensão primária. Quando o núcleo se move em outra direção, a tensão de
saída também aumenta de zero para um máximo, mas sua fase é oposta à fase primária.
A amplitude da tensão de saída é proporcional a distância movida pelo núcleo (até o seu
limite de curso), sendo por isso a denominação "linear" para o sensor. Assim, a fase da
tensão indica a direção do deslocamento. Como o núcleo não entra em contato com o
interior do tubo, ele pode mover-se livremente, quase sem atrito, fazendo do LVDT um
dispositivo de alta confiabilidade. Além disso, a ausência de contatos deslizantes ou
girantes permite que o LVDT esteja completamente selado das condições do ambiente.
Podemos citar como aplicações do LVDT o seu uso para posicionamento das
articulações em robótica, uso como sensores de nível dos reservatórios, como sensor
nos tanques de combustível dos automóveis, uso em aparelhos de ultra-sonografia e
como medidores de vazão.
Como algumas das vantagens do LVDT, podemos citar: Utilização para medida de
deslocamentos em ensaios estáticos ou quase estáticos; Utilização em ensaios
dinâmicos, acoplados aos sistemas de aquisição de dados; Por
não
terem
sistemas
mecânicos de amplificação, tais como alavancas ou engrenagens, não introduzem
esforços secundários nos corpos-de-prova. Dessa forma são os mais recomendados para
a investigação de modelos reduzidos (diferentes dos transdutores mecânicos que
utilizam molas, engrenagens e alavancas).
Como desvantagens, podemos citar: Necessitam de aferição antes da montagem; Não
têm indicação direta do deslocamento, utilizam-se de recursos de amplificação
eletrônica e conversão de dados como placas analógica digital (A/D).
Objetivos: Calibrar o sensor LVDT para medição de posição linear, verificar a sua
sensibilidade, simetria, linearidade e exatidão.
Materiais Utilizados: Base para montagem do LVDT, bobinas em suporte, haste com
núcleo, parafuso com suporte a paquímetro ou micrômetro; Multímetro e fios de
ligação.
Parte Prática: Na montagem, foi colocada a haste com o núcleo no interior do LVDT e
fixado o suporte do parafuso, colocando-o numa posição em que este pudesse ser
avançado até que a haste tocasse o fundo da cavidade. Um multímetro foi conectado ao
LVDT para a leitura de tensões. Inicialmente, foi medido o passo da rosca do parafuso.
Para isso, mediu-se o tamanho do parafuso e dividiu pelo número de voltas para
encontrar o passo. Dessa forma, a cada volta, foi possível saber a distância de avanço do
parafuso. A cada volta que o parafuso dava, anotava-se o número da volta, a posição
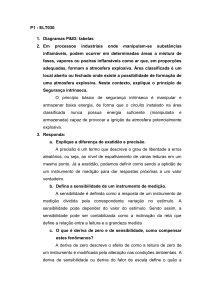
(em mm) e a corresponde tensão de saída (em mV) lida no multímetro. A partir dos
dados de posição e tensão, foi traçada a curva tensão x posição e a equação da posição
(2ª coluna) em função da tensão (3ª coluna). Através dos valores de tensões medidos,
foram determinadas as posições calculadas pela equação de ajuste, e colocadas na tabela
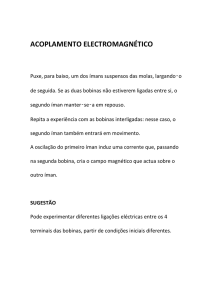
(4ª coluna). Ao subtrair os valores da 4ª coluna com os valores da 2ª coluna, foram
calculados os desvios de linearidade (5ª coluna). Finalmente, foi traçado a curva desvio
de lineridade (posição x desvio linear).
Dados obtidos:
volta posição(mm)
tensão
(mV)
posição nova
(mm)
desvio de linearidade
(mm)
0
0
87
7.12
7.12
1
1.104
86.9
7.14
6.04
2
2.208
85.67
7.44
5.23
3
3.312
82.8
8.13
4.82
4
4.416
78.43
9.18
4.76
5
5.52
72.67
10.56
5.04
6
6.624
65.88
12.19
5.57
7
7.728
58.51
13.96
6.23
8
8.832
51.68
15.60
6.77
9
9.936
46.03
16.95
7.02
10
11.04
41.72
17.99
6.95
11
12.144
39.27
18.58
6.43
12
13.248
38.74
18.70
5.46
13
14.352
39.87
18.43
4.08
14
15.456
42.4
17.82
2.37
15
16.56
45.84
17.00
0.44
16
17.664
50
16.00
-1.67
17
18.768
54.62
14.90
-3.88
18
19.872
59.16
13.80
-6.07
19
20.976
62.81
12.93
-8.05
20
22.08
64.81
12.45
-9.63
21
23.184
64.43
12.54
-10.65
22
24.288
61.2
13.31
-10.98
23
25.392
54.8
14.85
-10.54
24
26.496
45.03
17.19
-9.30
25
27.6
31.75
20.38
-7.22
26
28.704
16.83
23.96
-4.74
27
29.808
1.75
27.58
-2.23
28
30.912
-11.78
30.83
-0.09
29
32.016
-23.28
33.59
1.57
30
33.12
-31.65
35.60
2.48
31
34.224
-36.1
36.66
2.44
32
35.328
-36.5
36.76
1.43
33
36.432
-36.73
36.82
0.38
Gráfico: curva tensão x posição
Gráfico: curva de desvio de linearidade