Portanto:
ENERGIA MECÂNICA
Ec = ζ =
1 – CONCEITO
m . v2
2
É usual dizer-se que um sistema físico está
ENERGIZADO, quando ele é capaz de realizar um
trabalho, isto é, o sistema possui energia e existe a
possibilidade de transforma-la ou transferi-la total ou
parcialmente para outros sistemas físicos.
Uma mola comprimida, o elástico esticado de
um estilingue, um corpo no alto do prédio, um carro em
movimento são exemplos de sistemas energizados.
Lembrando que trabalho é uma forma de energia,
concluímos que as unidades e dimensões de qualquer
tipo de energia são as mesmas de trabalho.
Notas:
2 – MODALIDADES DE ENERGIA MECÂNICA
c) Como a velocidade escalar depende do referencial
adotado, a energia cinética também dependerá do
referencial adotado;
A energia chamada MECÂNICA pode se
apresentar fundamentalmente sob duas formas:
a) Sendo m > 0 e v2 > 0, a energia cinética nunca será
estritamente negativa;
b) Como a função Ec = f (v) é do 2º grau, o gráfico será
um arco de parábola;
Ec
v
d) Se representarmos a energia cinética de um corpo
( Ec) em função do quadrado de sua velocidade escalar
( v2), teremos uma função linear:
a) Energia Cinética
b) Energia Potencial
Ec
3 – ENERGIA CINÉTICA OU DE MOVIMENTO
A energia cinética, ou de movimento, é a energia
que o sistema possui em virtude do movimento das
partes que constituem o sistema em relação ao
referencial adotado.
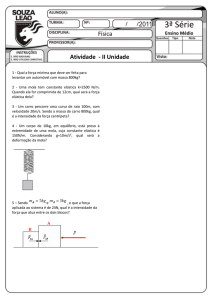
Para deduzirmos a expressão da energia cinética,
consideraremos o caso particular de um ponto material
de massa m, em repouso, que recebe ação de uma força
resultante constante F.
F
v0 = 0
V
d
V2
4 – ENERGIA POTENCIAL
A energia potencial, ou de posição, é a energia
que o sistema possui em virtude da posição especial das
partes que constituem o sistema em relação ao
referencial adotado.
A energia potencial costuma ser considerada
como uma forma de energia LATENTE, uma energia
armazenada e pronta para ser transformada em outra
forma de energia, em geral ligada a movimento
Estudaremos a energia potencial mecânica sob duas
formas:
a) Energia Potencial de Gravidade
b) Emergia Potencial Elástica
A energia de movimento que o ponto material adquire é
dada pelo trabalho realizado pela força constante F.
Da definição de trabalho temos:
ζ =F.d=m.a.d
Onde a é a aceleração escalar e d é o módulo do
deslocamento do ponto material. Da equação de
Torricelli da Cinemática, temos:
V2 = vo2 + 2. a . d
a . d = v2/2
trabalho fica:
Energia Potencial de Gravidade
A energia potencial de gravidade é uma forma de
ENERGIA DE CAMPO, isto é, conseqüência do campo
de forças gravitacionais que existe em torno da Terra.
Para determinarmos a equação que expressa a energia
potencial de gravidade, precisamos escolher um plano
horizontal de referência, isto é,um plano horizontal que
corresponde ao valor zero de energia potencial de
gravidade.
onde vo = 0
A
H
substituindo na equação de
ζ =
m . v2
(m)
(+)
Plano de referência
2
(─)
Energia Potencial = 0
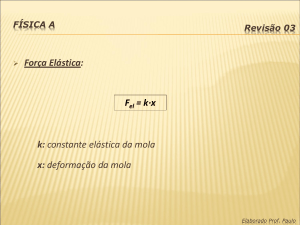
Consideremos um ponto material de massa m,
situado em um ponto A, a uma altura H, acima do plano
de referência. Seja g o módulo da aceleração da
gravidade. Se abandonarmos o ponto material, ele cairá,
devido à ação da força de gravidade, e sua energia de
posição vai gradativamente transformando-se em energia
de movimento. Quando o ponto material chegar ao plano
de referência, toda sua energia potencial terá se
transformado em energia de movimento. Essa
transformação de energia potencial de campo em energia
de movimento corresponde exatamente ao trabalho da
força peso. Então, a energia potencial de campo ( Ep)
será dada por:
A força desenvolvida por agente esterno é usada
para vencer a resistência que a mola opõe à sua
deformação, portanto, tem intensidade K.x.
O trabalho do agente externo corresponde à
energia que o agente transfere e fica armazenada na mola
sob forma de energia elástica.
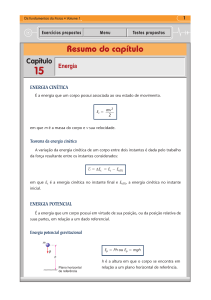
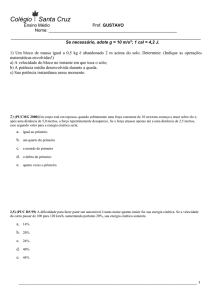
Se quisermos saber a quantidade de energia
armazenada, basta calcularmos o trabalho do agente
externo. Para calcularmos este trabalho, construímos o
diagrama da intensidade da força aplicada F em função
do deslocamento de seu ponto de aplicação d.
F
K.x
Ep = ζp = P . H = m . g . H
d
x
Se o ponto material estiver em uma posição abaixo do
plano de referência, a sua energia potencial de gravidade
será considerada negativa, isto é, o valor de H será
considerado negativo.
Fisicamente, a energia de gravidade negativa
significa que o ponto material precisa RECEBER
ENRGIA para conseguir atingir o plano de referencia,
ou seja, o nível zero da energia potencial.
Cumpre salientar que o valor da energia
potencial da gravidade ( m . g . H ) depende do plano de
referência adotado, porém a variação de energia
potencial de gravidade que é a grandeza que realmente
interessa ( m . g . ΔH ) não depende da posição do plano
horizontal de referência adotado.
Energia Potencial Elástica
A energia potencial elástica, ou de deformação, é
uma forma de energia armazenada em uma mola
deformada ou em um elástico esticado. È tipicamente,
uma forma de energia latente que está prestes a se
transformar em energia de movimento.
Para deduzirmos a expressão da energia elástica,
imaginemos uma mola comprimida.
O trabalho desenvolvido é dado pela área do triângulo
hachurado.
Logo:
ζ=
K.x .x
=
K . x2
2
=
K . x2
2
2
Eelástica
Notas:
a) Sendo K > 0 e x2 ≥0, a energia potencial elástica
nunca será estritamente negativa.
b) Sendo Ep = f ( x ) uma função do 2º grau, o
gráfico terá a forma de um arco de parábola.
E
p
x
ENRGIA MECÂNICA
A energia mecânica total EM é a soma das energias
cinética e potencial.
EM
=
Ec
+
Ep
x
F
Cumpre salientar que o valor da energia mecânica total
depende do referencial e pode ser negativo, positivo ou
nulo.
Sendo x a deformação da mola, sabemos que a
intensidade da força que a mola opõe à sua deformação é
dada por:
F = K . x ( Lei de Hooke )
Onde K representa uma grandeza característica da mola (
ou sistema elástico, se for o caso ) denominada “
CONSTANTE ELÁSTICA”.
Pra deformar a mola, um agente externo aplicou
uma força F, produzindo um deslocamento x e, portanto,
realizando um certo trabalho.
2