PROGRAMA DE FORMAÇÃO CONTÍNUA EM MATEMÁTICA
PARA PROFESSORES DO 1º E 2º CICLOS
Transformações geométricas
1.
Vectores
1.1. Adição dum ponto com um vector
1.2. Adição de dois vectores
1.3. Multiplicação dum número real por um vector
2.
Isometrias
2.1. Translação associada a um vector
2.2. Rotação no plano
2.3. Simetria central
2.4. Simetria axial
2.5. Classificação das isometrias no plano
3.
Homotetias
3.1. Consequências da definição
3.2. Propriedades das homotetias de razão r 0
3.3. Classificação das homotetias
4.
Semelhanças
4.1. Classificação das semelhanças
4.2. Figuras semelhantes
4.2.1.
Polígonos semelhantes
4.3. Semelhança de triângulos
4.4. Teorema de Thales
4.5. Consequências da semelhança aplicada aos triângulos rectângulos
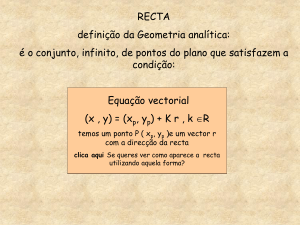
1. Vectores
Definição
Dois segmentos dizem-se equipolentes se têm a mesma direcção, o mesmo sentido e o
mesmo comprimento.
Consideremos um segmento orientado [A,B] e o conjunto de todos os segmentos
orientados equipolentes a ele.
Este conjunto de segmentos com a mesma direcção, o mesmo sentido e o mesmo
comprimento, define um vector (ou vector livre) de que cada um dos segmentos orientados é
um representante.
Notação
Este vector representa-se por AB ou CD ou MN ou ainda por uma letra minúscula
tendo por cima uma seta: u .
Definição
Vector nulo, 0 , é um vector de comprimento igual a zero.
Observação: A direcção e o sentido do vector nulo são indeterminados.
1.1 Adição dum ponto com um vector
Definição
Dados, no plano um vector u , chama-se soma de A com u ao ponto B tal que AB u
e escreve-se B A u .
B
u
u
A
1
Programa de Formação Contínua em Matemática
1.2 Adição de vectores
Definição
Soma dos vectores a e b é o vector a b , que se obtém da seguinte forma:
- a um ponto O, qualquer, soma-se a e obtém-se um ponto M;
- ao ponto M soma-se a e b e obtém-se N.
a b ON
Então
Exemplos
M
1)
b
a
b
N
a
O
a b
Como, num triângulo, qualquer lado é menor do que a soma dos outros dois, tem-se:
a b a b
a
2)
a
O
M
b
N
b
O
N
a b
Quando, como neste caso, os vectores têm a mesma direcção e sentido, tem-se:
a b a b
3)
a
a
N
M
b
b
N
Neste caso tem-se
O
a b
O
a b a b
2
Programa de Formação Contínua em Matemática
4)
a
b
a
b
a b 0
NO
(Neste caso, os vectores são simétricos)
Também se tem:
a b a b .
Definição
Dois vectores dizem-se simétricos se têm a mesma direcção, sentidos opostos e o mesmo
comprimento. (A sua soma é o vector nulo.)
Conclusão
Podemos concluir dos exemplos anteriores que, quaisquer que sejam os vectores u e v,
u v u v .
tem-se sempre:
Propriedades da adição de vectores
Para quaisquer vectores do plano a , b , c , tem-se:
i) Propriedade Comutativa
a b b a
ii) Propriedade Associativa
a b c a b c
iii) Existência de elemento neutro
a+ 0 = 0 +a=a
0 é o elemento neutro da adição de vectores.
iv) Existência de oposto
a a a a 0
O oposto de a é o seu simétrico a .
3
Programa de Formação Contínua em Matemática
1.3 Multiplicação dum número real por um vector
Definição
Produto dum número real k por um vector u é um vector que se representa por k u
(ou k . u ou k u ) e:
Se k 0 e u 0 , tem
- o comprimento igual ao produto do valor absoluto de k pelo comprimento de u
( | k | . | u |) ;
- a direcção do vector u ;
- o sentido de u se k > 0, e o sentido contrário se k < 0.
Se k = 0 ou u = 0 , então k . u = 0 .
Exemplos
u
Consideremos um vector u 0 , (qualquer)
kZ
1) 3 u
u
u
u
3u
2) -2 u
u
u
2 u
4
Programa de Formação Contínua em Matemática
kQ
3)
1
u
2
3
u
2
u
3
u
2
5
4) u
2
1
u
2
u
u
5
u
2
k { Números irracionais }
5)
2u
2u
u
u
2u
Propriedades
Quaisquer que sejam os vectores u e v e os números reais m e p, tem-se:
i) m ( p u ) = ( m p) u
ii) (m + p) u = m u + p u
iii) m ( u + v ) = m u + m v
iv) 1 . u = u
5
Programa de Formação Contínua em Matemática
Definição
Dois vectores, u e v , não nulos, são colineares (têm a mesma direcção) se e só se
existir um número real k tal que u = k v .
u
Ao número k chama-se razão dos vectores u e v e escreve-se: k .
v
Nota
O vector nulo é colinear com qualquer outro.
No entanto, só tem sentido falar na razão entre u e v se v 0 .
6
Programa de Formação Contínua em Matemática
2. Isometrias
ISO + METRIA – mesma medida
Definição
Uma isometria é uma transformação geométrica que transforma uma figura noutra
geometricamente igual.
Iremos estudar três tipos diferentes de isometrias no plano: as translacções, as rotações
e as simetrias.
2.1 Translação associada a um vector
Definição
Translação definida por um vector u é uma aplicação T , do conjunto P, dos pontos do
u
plano, nele mesmo, que a cada ponto A faz corresponder a sua soma com u .
T : P P
A’
u
A A’ = A + u
u
u
T
A
A’ chama-se o transformado ou imagem de A pela translacção T .
u
Programa de Formação Contínua em Matemática
u
Propriedades
1) A translação associada ao vector nulo é a aplicação identidade.
T ( A) A
A
0
A A 0
T
0
2) A imagem de uma recta é:
a) uma recta estritamente paralela,
se a direcção do vector associado é diferente da direcção da recta;
r’
u
u
u
r // r '
r
b) a própria recta
se o vector associado tem a direcção da recta.
r
u
r’
r r'
u
3)
A imagem de uma semi-recta é uma semi-recta directamente paralela (isto é, com o
mesmo sentido)
A’
B’
u
u
u
A
B
Programa de Formação Contínua em Matemática
T A B A' B'
u
4) A imagem de um segmento orientado é um segmento orientado equipolente.
A
A’
u
( A, B) ( A' , B' )
u
( A, B) ~ ( A' , B' )
u
B’
B
5) A imagem dum ângulo é um ângulo de lados directamente paralelos (mesma amplitude e
B’
mesmo sentido).
A’
u
u
u
u
B
C’
ABC A' B' C '
C
A
6) A composta de duas translações associadas, respectivamente, aos vectores u e v é a
translação definida pelo vector u v
A’
u
T T ( A) A' ' T ( A)
u
uv
v
u
v
A
v
u v
A’’
7) A inversa da translacção definida pelo vector u é a translação associada a u :
T
u
A’
u
T ( A) A' e T
T
A
u
( A' )
u
A
u
Nota
Toda a translação é uma isometria : transforma uma figura noutra geometricamente igual.
Programa de Formação Contínua em Matemática
2.1.1. Aplicações das translações
1) Ângulos de lados paralelos
Ângulos de lados directamente paralelos são geometricamente iguais.
B
A B // N M e A C // N Q
A
C
directamente
M
u
Q
N
Como MNQ BAC então MNQ BAC
T
NA
Observação
Duas semi-rectas dizem-se directamente paralelas se são paralelas e têm o mesmo sentido.
Ângulos de lados inversamente paralelos são geometricamente iguais.
u
'
ˆ ' ˆ , já que os ângulos ’ e são ângulos de lados directamente paralelos
ˆ
ˆ ' , já que e ’ são ângulos verticalmente opostos.
Logo ˆ ˆ
Programa de Formação Contínua em Matemática
2) Ângulos definidos por duas rectas paralelas e uma secante
s
2
1
r
4
3
u
6
p
5
7
8
Ângulos alternos internos: os ângulos (3,5) e (4,6)
Ângulos alternos externos: os ângulos (1,7) e (2,8).
Ângulos externos do mesmo lado da secante: Pares de ângulos (1,8) e (2,7)
Ângulos internos do mesmo lado da secante: Pares de ângulos (3,6) e (4,5)
Os ângulos alternos (internos ou externos) são geometricamente iguais.
Os ângulos do mesmo lado da secante (internos ou externos) são suplementares.
3) Soma dos ângulos internos de um triângulo
A
E
3
C
3
2
D
1
1
B
Consideremos um triângulo [ABC] e seja ED a paralela a BC conduzida pelo ponto A.
DÂB CBˆ A , já que DAB e CBA são ângulos alternos internos.
EÂC BCˆ A , já que EAC e BCA são ângulos alternos internos.
Então
ABC CAB BCA ângulo raso , isto é 1̂ 2̂ 3̂ 180 º
A soma das amplitudes dos ângulos internos de um triângulo é igual à de um ângulo raso.
Programa de Formação Contínua em Matemática
4) Ângulo externo de um triângulo
A
E
2
C
2
1
1
D
B
Na figura BE // AC e ABˆ D ABˆ E EBˆ D .
Como EBˆ D ACˆ B , já que EBD e ACB são ângulos correspondentes
e ABˆ E CÂB , já que ABE e CAB são ângulos alternos internos, então
ABˆ D ACˆ B BCˆ A .
Um ângulo externo de um triângulo é igual à soma dos ângulos internos não adjacentes.
Programa de Formação Contínua em Matemática
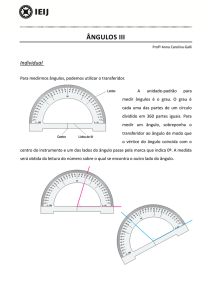
2.2 Rotações do plano
Definições
Ângulo orientado
Ângulo positivo é o ângulo gerado no sentido contrário ao movimento dos ponteiros
do relógio, por uma semi-recta rodando em torno da origem.
A
Lado extremidade
O A – lado origem
+
O
Lado origem
O B – lado extremidade
B
O ângulo representa-se por O A, O B .
Ângulo negativo é o ângulo gerado no sentido do movimento dos ponteiros do relógio,
por uma semi-recta rodando em torno da origem.
D
Lado origem
C D – lado origem
-
C
C E – lado extremidade
E
Lado extremidade
O ângulo representa-se por C D, C E .
Definição
Rotação de centro O e amplitude é a aplicação que a cada ponto M do plano faz
corresponder um ponto M’ tal que:
OM OM '
e
^
O M , O M '
e escreve-se R (O, ) (M) = M’.
Programa de Formação Contínua em Matemática
Propriedades
1) A rotação de amplitude 0º é a aplicação identidade.
R (C, 0º) (A) = A.
2) A imagem do centro da rotação é o próprio centro.
3) A imagem de uma recta é outra recta. r r ' .
R
4) A imagem de uma semi-recta é outra semi-recta. A B A' B' .
R
5) A imagem de um segmento de recta é um segmento de recta geometricamente igual.
ABA' B'
R
6) A imagem de um ângulo orientado é outro ângulo orientado equipolente (geometricamente
igual e do mesmo sentido).
N P , N M N ' P ' , N ' M '
R
^
e
^
N P, N M N ' P ' , N ' M '
7) A composta de duas rotações com o mesmo centro
R (C, ) R (C, )
é uma rotação com o mesmo centro e amplitude igual à soma + :
R (C, ) R (C, ) = R (C, +)
8) A rotação inversa da rotação de centro C e amplitude é a aplicação R (C, -):
[R (C, -) R (C, )] (A) = A
Nota
Toda a rotação é uma isometria : transforma uma figura noutra geometricamente igual.
Programa de Formação Contínua em Matemática
2.3 Simetria central
Definição
Simetria central ou simetria em relação a um ponto M, é a rotação de centro em M e
amplitude 180º (SM).
MB MB'
S M ( B ) B'
S M ( B' ) B
Terminologia
M é o centro da simetria e os pontos B e B’ dizem-se simétricos relativamente a M.
Observação
Todo o ponto B se transforma em outro ponto B’ a igual distância de M e pertenceÀ
semi-recta oposta a M B .
Programa de Formação Contínua em Matemática
Figuras simétricas em relação a um ponto
Definição
Uma figura diz-se simétrica em relação a um ponto C quando coincide consigo própria
na simetria que tem por centro C. C é o centro da simetria dessa figura.
Exemplos
Figuras simétricas em relação a C
Não é uma figura simétrica em relação a C
Propriedades
As simetrias centrais têm todas as propriedades das rotações (são rotações) e
consequentemente são isometrias.
Programa de Formação Contínua em Matemática
2.4 Simetria axial
Definições
Simetria em relação a uma recta r, Sr, é a aplicação do plano nele mesmo em que:
i)a imagem de um ponto A não pertencente a r é um ponto A’ tal que r é
perpendicular ao meio de [AA’];
ii) a imagem de um ponto de r é o próprio ponto.
Os pontos A e A’ dizem-se simétricos relativamente a r:
Sr (A) = A’ e Sr (A’) = A.
A simetria em relação a uma recta r também se chama simetria axial de eixo r.
r
B B'
A
Se A r então AA' r
M
A'
e
MA MA'
Se B r então S r ( B ) B
Propriedades
1) Numa simetria axial de eixo r, Sr, os pontos de r são invariantes.
r
P P'
Se P r então Sr (P) = P.
Programa de Formação Contínua em Matemática
2) A imagem duma recta é uma recta:
m
P
Q
Sr (m) = m’.
r
Q'
P'
m'
Nota
Basta determinar os simétricos de dois quaisquer pontos P e Q da recta: Sr (P) = P’, Sr (Q) = Q’
3) A imagem duma semi-recta é uma semi-recta:
B
A
S r A B A ' B' .
r
A'
B'
Nota
Basta determinar os pontos simétricos de dois pontos da semi-recta: a sua origem A e um outro
qualquer ponto B: Sr (A) = A’ e Sr (B) = B’.
Programa de Formação Contínua em Matemática
4) A imagem dum segmento de recta é um segmento de recta geometricamente igual.
r
A
A'
S r [ AB] [ A ' B ' ]
em que [ AB] [ A' B' ]
B
B'
Nota
Basta determinar os pontos simétricos dos extremos A e B do segmento de recta: Sr (A) = A’ e
Sr (B) = B’
5) A imagem dum ângulo orientado é outro ângulo orientado geometricamente igual e de
sentido contrário:
C D, C E C ' D ' , C ' E '
S
r
A
B
C
r
C'
B'
A'
Nota
Aqui temos de determinar os simétricos de três pontos do ângulo: o vértice B e dois quaisquer
pontos A e C situados em lados distintos do ângulo: Sr (B) = B’, Sr (A) = A’ e Sr (C) = C’.
Programa de Formação Contínua em Matemática
Nota
A simetria axial é uma isometria, transforma uma figura noutra geometricamente igual
mas inverte o sentido dos ângulos orientados.
Figuras simétricas em relação a uma recta
Definição
Uma figura diz-se simétrica em relação a uma recta r se coincide com a sua imagem na
simetria de eixo r (eixo de simetria da figura).
Exemplos
Programa de Formação Contínua em Matemática
2.5 Classificação das isometrias do plano
Translações
Positivas ou
Rotações
Deslocamentos
Composições de rotações e translações
Simetrias axiais
Isometrias
Negativas
Composições duma simetria axial
com deslocamentos
Programa de Formação Contínua em Matemática
3. Homotetias
Definição
Dados um ponto O e um número real r, chama-se homotetia de centro O e razão r, e
escreve-se H (O,r), à aplicação do plano em si mesmo, que faz corresponder a cada ponto M
um ponto M’ tal que:
OM ' r OM
Se r > 0, a homotetia diz-se positiva.
Se r < 0, a homotetia diz-se negativa.
Se r = 0, a imagem de qualquer ponto é o centro da homotetia.
Exemplos
1)
P'
P
Se r > 0
H (A,2)
AP' = 2 AP
P é homotético de P'
A
2)
P
Se r < 0
A
AP' = -2 AP
H (A,-2)
P é homotético de P'
P'
3)
Se r = 0
H (A,0)
AP' = 0 AP
P' A
P
A P'
P é homotético de P'
ESEV, 2005/2006
3.1 Consequências da definição
1) A imagem do centro da homotetia é o próprio centro.
2) Numa homotetia de centro A que transforma P em P’, os pontos A, P e P’ são pontos
colineares.
3) Dados um ponto M, o seu transformado M’ e o centro da homotetia A, é possível
determinar a razão da homotetia.
4) Dados um ponto e o seu transformado numa homotetia de razão dada, é possível
determinar o centro da homotetia.
5) Uma homotetia de razão igual a 1 é a aplicação identidade.
6) Uma homotetia de razão igual a -1 é a simetria de centro A.
ESEV, 2005/2006
Figuras homotéticas
Definição
Duas figuras são homotéticas se existe uma homotetia que aplica uma na outra.
Exemplos
A'
1) H (O,2)
A
O
C
B
D
E
H
F
C'
B'
D'
E'
G
F'
H'
G'
Note que as figuras têm a mesma forma e diferem apenas no tamanho e na posição.
2) Dado o [ABC] e o segmento [DE] // [BC], construir o triângulo homotético ao dado.
D
B
A
C
E
D
Resolução
B
A'
A
O
C
ESEV, 2005/2006
E
3.2 Propriedades das homotetias de razão r 0
1
r
1) A aplicação inversa da homotetia H(O, r) é a homotetia H O, .
2) Imagem dum segmento orientado
Numa homotetia, o transformado de um segmento orientado é um segmento orientado
paralelo e do mesmo sentido se a razão for positiva e de sentido contrário se a razão for
negativa.
A razão entre o comprimento da imagem e o comprimento do segmento é igual ao valor
absoluto da razão da homotetia.
3) Imagem duma recta
Se o centro da homotetia não pertence à recta, a imagem é uma recta estritamente
paralela.
Se o centro pertence à recta, a imagem é a própria recta.
4) Imagem dum ângulo orientado
Um ângulo orientado é transformado num ângulo orientado equipolente.
Aplicação à resolução de problemas
Conhecido o centro duma homotetia O, um ponto A e o seu homotético A’, determinar a
imagem de qualquer outro ponto B O A .
Dados dois segmentos [AB] e [CD] com a mesma direcção (mas não pertencentes à
mesma recta), definir uma homotetia que aplique um no outro.
ESEV, 2005/2006
3.3. Classificação das homotetias
Quanto ao sinal da razão:
Positivas se r > 0
Negativas se r < 0
Quanto ao valor absoluto da razão:
Ampliações se | r | > 1
Isometrias se | r | = 1
Reduções se | r | < 1
Exemplos
1)
H (O,2)
Positiva; ampliação
H (O, ½ )
Positiva; redução
O
2)
A
H (O,-1)
O
Negativa
C
B
D
E
H
E'
F
ESEV, 2005/2006
G
(homotetia inversa)
3)
O
1
H O,
3
Negativa; redução
H (O, -3)
Negativa; ampliação
3.4. Consequências métricas das homotetias
Um feixe de rectas concorrentes determina em duas transversais segmentos
correspondentes directamente proporcionais.
O
B
A
r
s
C
D
OC
OA
OD
OB
CD
AB
ESEV, 2005/2006
4. Semelhanças
Definições
Chama-se semelhança a uma aplicação do plano em si mesmo, que transforma ângulos em ângulos
geometricamente iguais e segmentos de recta em segmentos de recta de comprimentos directamente proporcionais.
Razão de semelhança é o quociente entre o comprimento de um segmento de recta transformado e o
comprimento do correspondente segmento original. (Evidentemente será um número positivo)
Aplicação inversa de uma semelhança
A aplicação inversa de uma semelhança, S, de razão r é ainda uma transformação de semelhança, cuja razão é o
inverso aritmético da de S,
1
.
r
Composição de semelhanças
A composta de duas transformações de semelhança é ainda uma transformação de semelhança, cuja razão é
valor absoluto do produto das razões das componentes.
Tipos de semelhanças
São semelhanças:
As isometrias (translacções, rotações e simetrias)
As homotetias
Razão de semelhança: 1
Razão de semelhança: razão da homotetia
As aplicações compostas de duas ou mais homotetias:
Razão de semelhança: valor absoluto do produto das razões das homotetias
As aplicações compostas de uma homotetia com uma isometria:
Razão de semelhança: valor absoluto da razão da homotetia
E
ESSE
EV
VIISSEEUU
4.1. Classificação de semelhanças
Quanto ao valor da razão:
Ampliações se r > 1
Isometrias se r = 1
Reduções se r < 1
Quanto à conservação ou não do sentido dos ângulos orientados:
Positivas se conservam o sentido
Negativas se invertem o sentido
4.2. Figuras semelhantes
Definição
Duas figuras A e B são semelhantes se existir, pelo menos, uma semelhança que transforme uma na outra
Nota
Duas figuras semelhantes têm, afinal, a mesma forma, podendo diferir na posição e no tamanho.
E
ESSE
EV
VIISSEEUU
4.2.1 Polígonos semelhantes
Definição
Dois polígonos P e P’ são semelhantes se têm de um para o outro:
os ângulos iguais;
lados correspondentes directamente proporcionais.
Notação Escreve-se P ~ P’.
Observações
Os pares de lados proporcionais de polígonos semelhantes dizem-se homólogos.
A razão dos perímetros de dois polígonos semelhantes é igual à razão de semelhança:
P
r.
P'
A razão das áreas de dois polígonos semelhantes é igual ao quadrado da razão de semelhança:
A
r2 .
A'
Como consequência da definição de semelhança de polígonos, pode afirmar-se que dois polígonos regulares
com o mesmo número de lados são semelhantes.
E
ESSE
EV
VIISSEEUU
4.3. Semelhança de triângulos
Para concluir que dois triângulos são semelhantes, é suficiente que se verifique uma das três condições
seguintes (casos de semelhança de triângulos).
Casos de semelhança de triângulos
1) (AAA) Dois triângulos são semelhantes se têm dois ângulos iguais.
2) (LAL) Dois triângulos são semelhantes se têm um ângulo igual e os comprimentos dos lados que os formam
directamente proporcionais.
3) (LLL) Dois triângulos são semelhantes se têm os comprimentos dos três lados proporcionais.
E
ESSE
EV
VIISSEEUU
4.4. Teorema de Thales
Consideremos várias rectas paralelas a, b, c e d, intersectadas pelas duas secantes r e s.
Os segmentos [AB] e [MN], contidos nas rectas secantes e compreendidos entre duas paralelas dizem-se
correspondentes.
Também são correspondentes os segmentos [AC] e [MP]; [BC] e [NP]; [CD] e [PQ];...
Teorema de Thales
Um feixe de rectas paralelas determina em duas transversais segmentos correspondentes directamente
proporcionais.
AB
MN
BC
NP
CD
PQ
AC
MP
...
E
ESSE
EV
VIISSEEUU
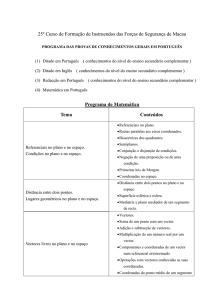
4.5. Consequências da semelhança aplicada aos triângulos rectângulos
Projecção ortogonal sobre uma recta
Projecção ortogonal de um ponto P sobre uma recta r é o ponto P’, pé da perpendicular baixada de P sobre
r.
Projecção ortogonal de um segmento de recta sobre uma recta r é o segmento cujos extremos são as
projecções ortogonais dos extremos do segmento sobre a recta.
E
ESSE
EV
VIISSEEUU
A semelhança nos triângulos rectângulos
1) Em qualquer triângulo rectângulo, a altura relativa à hipotenusa divide-o em dois triângulos rectângulos
semelhantes entre si e semelhantes ao triângulo dado.
[ABH] ~ [BCH] ~ [ABC]
2) Teorema do cateto
Num triângulo rectângulo, um cateto é meio proporcional entre a hipotenusa e a sua projecção sobre ela.
b a
a n
e
b c
c m
3) Teorema da altura
Num triângulo rectângulo, a altura relativa à hipotenusa é meio proporcional entre os segmentos que ela determina.
m h
h n
E
ESSE
EV
VIISSEEUU