Mecânica – Aula 5
Maria Augusta Constante Puget (Magu)
Cinemática X Dinâmica (1)
Cinemática: Estudo do movimento sem se
importar com o que lhe deu origem. É uma
“linguagem para descrever o movimento”.
◦ Grandezas utilizadas: Deslocamento, velocidade e
aceleração.
Dinâmica: Estudo da relação entre o
movimento e a(s) força(s) que lhe deram
origem.
◦ Grandezas utilizadas: Deslocamento, velocidade e
aceleração juntamente com dois outros conceitos:
Força e massa.
2
Dinâmica – Leis de Newton (1)
Os princípios da dinâmica podem ser
sintetizados em um conjunto de três
afirmações conhecidas como leis de
Newton do movimento.
Essas leis se baseiam em estudos
experimentais sobre o movimento dos
corpos.
3
Dinâmica – Leis de Newton (2)
As leis de Newton do movimento são
fundamentais sob dois aspectos:
1. Elas não podem ser deduzidas ou
demonstradas a partir de outros
princípios.
2. Elas permitem nosso entendimento dos
tipos mais comuns de movimento. São,
assim, os fundamentos da mecânica
clássica (também conhecida como
mecânica newtoniana).
4
Dinâmica – Leis de Newton (3)
Porém, as leis de Newton não são
universais:
1. Não se aplicam a situações que envolvem
velocidades muito elevadas (próximas à
velocidade da luz) Mecânica
Relativística.
2. Não se aplicam a situações que envolvem
dimensões muito pequenas (moleculares,
atômicas e subatômicas) Mecânica
Quântica.
5
Dinâmica – Leis de Newton (4)
As leis de Newton foram
claramente estabelecidas,
pela primeira vez, por Sir
Isaac Newton (1642 –
1727) que as publicou em
1687
em
sua
obra
intitulada
Philosophiae
Naturalis
Principia
Mathematica
(Princípios
Matemáticos da Filosofia
Natural).
6
Dinâmica – Leis de Newton (5)
Muitos
outros
cientistas
anteriores a Newton também
contribuíram
para
os
fundamentos da mecânica,
incluindo Copérnico, Brahe,
Kepler
e
especialmente
Galileu Galilei (1564 –
1642).
Nas palavras do próprio
Newton: “Se eu fui capaz de
ver um pouco mais adiante do
que outros homens, é porque eu
montei
nos
ombros
de
gigantes”.
7
Newton (1)
Seu epitáfio foi escrito pelo poeta
Alexander Pope:
A natureza e as leis da natureza estavam
imersas em trevas; Deus disse "Haja
Newton" e tudo se iluminou.
8
Força (1)
O
conceito de força nos fornece uma
descrição
quantitativa
da
interação entre dois corpos ou
entre um corpo e seu ambiente.
As forças podem ser:
1.
2.
De contato.
De campo.
9
Forças de Contato (1)
Forças de contato são aquelas que envolvem
o contato direto entre dois corpos.
Exemplos:
Força de puxar ou empurrar exercida pelas
nossas mãos.
Força de puxar exercida por uma corda sobre
um objeto no qual ela está presa.
Força que o solo exerce sobre os nossos pés:
força de atrito.
Força normal.
Força de resistência do ar (e de outros
fluidos).
10
Forças de Campo (1)
Forças que atuam mesmo entre corpos que
estejam afastados entre si.
Exemplos:
Gravidade:
◦ A Terra se mantém em órbita em torno do Sol
devido ao fato de o Sol exercer uma atração
gravitacional sobre a Terra, mesmo estando a uma
distância de 150 milhões de quilômetros desta.
Força elétrica entre duas partículas
carregadas.
Força magnética entre um par de ímãs.
11
Força – Grandeza Vetorial (1)
A força é uma grandeza vetorial.
Para caracterizar totalmente uma força,
precisamos informar:
◦ Módulo (intensidade).
◦ Direção.
◦ Sentido.
12
Força – Unidade e Valores Típicos (1)
A unidade no SI da intensidade de uma força é o newton,
denotado pela letra N.
Na tabela a seguir temos alguns valores típicos das
intensidades de algumas forças.
Atração gravitacional exercida pelo Sol sobre a Terra
3,5 X 1022 N
Força de propulsão de um foguete
3,9 X 107 N
Peso de uma baleia azul
1,9 X 106 N
Força de propulsão máxima de uma locomotiva
8,9 X 105 N
Peso aproximado de um homem de 110 kg
1,1 X 103 N
Peso de uma maçã média
1N
Atração elétrica entre o próton e o elétron no átomo de hidrogênio
8,2 X 10-8 N
Peso de uma pequena bactéria
1 X 10-18 N
Peso de um átomo de hidrogênio
1,6 X 10-6 N
Peso de um elétron
8,9 X 10-30 N
Atração gravitacional entre o próton e o elétron no átomo de hidrogênio
3,6 X 10-47 N
13
Força – Efeitos (1)
É
possível reconhecer a existência de
forças pelo efeito que produzem
quando aplicadas a um corpo.
Podemos
definir força como sendo um
agente físico capaz de:
◦ Iniciar movimentos,
◦ Alterar a velocidade dos corpos e/ou
◦ Produzir deformações.
14
Força – Efeitos (2)
Iniciar movimentos e...
Alterar a velocidade dos corpos...
são denominados efeitos dinâmicos das
interações.
As deformações são denominadas efeitos
estáticos das interações.
15
Força – Efeitos (3)
Os dois tipos de efeitos podem ocorrer
simultaneamente. Exemplo: Ao chutar uma
bola, o pé do jogador pode deformá-la, além
de alterar sua velocidade.
Obs: Nem sempre a aplicação de uma força
a um corpo implica na ocorrência de um dos
efeitos citados. Isto pode ocorrer quando a
ação da força em questão é neutralizada pela
ação de outra força.
16
Referencial Inercial (1)
As leis de Newton, nas quais se baseia a
dinâmica, só valem quando o movimento do
corpo é analisado em relação a um referencial
denominado referencial inercial.
Definimos referencial inercial como sendo
qualquer referencial em repouso em relação às
estrelas fixas ou outro que não tenha
aceleração em relação a este.
Assim, se um referencial estiver em repouso ou
em movimento retilíneo uniforme em relação a
um referencial inercial, ele também pode ser
considerado um referencial inercial.
17
A Terra como Referencial (1)
Um corpo em movimento curvilíneo não é um
referencial inercial, pois mesmo que o movimento
seja uniforme, ele sempre terá uma aceleração
centrípeta.
Em seu movimento anual em torno do Sol, o
centro da Terra descreve uma trajetória quase
circular com um raio de aproximadamente 150
milhões de km.
Porém,
a
aceleração
centrípeta
deste
movimento
é
muito
pequena,
sendo
aproximadamente mil vezes menor que a aceleração
de um objeto caindo na superfície da Terra.
18
A Terra como Referencial (2)
Desta forma, se associarmos um referencial
ao centro da Terra, este poderá ser
considerado praticamente inercial. Isto
vale para qualquer ponto do eixo de rotação
da Terra também, inclusive seus polos.
Porém, quanto mais nos afastamos dos polos
e mais nos aproximamos do Equador, mais os
efeitos da rotação da Terra em torno do
seu próprio eixo se fazem sentir.
19
A Terra como Referencial (3)
Comparando-a com os outros pontos da
superfície, a aceleração centrípeta de um
ponto qualquer do Equador é máxima.
Ainda assim, trata-se de um efeito
pequeno, pois
esta
aceleração
é
aproximadamente 300 vezes menor que g, a
aceleração de um corpo caindo na superfície
da Terra.
20
A Terra como Referencial (4)
Concluímos, assim que, desde que o estudo
dinâmico do movimento não requeira
uma precisão muito refinada, ele pode
ser efetuado adotando-se um referencial
fixo em relação à superfície da Terra.
21
Como pensavam os antigos (1)
1.
2.
3.
4.
Por que os corpos se movem?
Como tem início o movimento?
Por que os movimentos se mantém?
O que faz um corpo parar?
Perguntas como estas foram feitas
conscientemente pela primeira vez pelos
antigos gregos há cerca de 3000 anos atrás.
22
Como pensavam os antigos (2)
Para eles, o estado natural dos corpos
era o estado de repouso.
Para retirá-los deste estado, pondo-os em
movimento, era necessária uma força.
Quando a força deixava de atuar, o
movimento terminava e os corpos
paravam, voltando ao seu estado natural.
23
Como pensavam os antigos (3)
Esta explicação do movimento foi sustentada
por Aristóteles (384-322 a.C.) e, devido ao
seu grande prestígio e influência entre as
gerações que o sucederam, foi assim aceita
durante muitos séculos.
Sabe-se, hoje, que Aristóteles não estava certo.
Foi Galileu Galilei quem conseguiu ver as
coisas como são na realidade.
O enunciado do Princípio da Inércia baseiase no trabalho de Newton, que desenvolveu as
ideias de Galileu sobre a inércia.
24
Força – Princípio da Superposição (1)
O efeito produzido sobre o movimento de um
corpo por um número qualquer de forças é o
mesmo efeito produzido por uma força única
igual à soma vetorial de todas as forças.
𝑅 = 𝐹1 + 𝐹2 + 𝐹3 + ⋯ =
𝐹
25
Força – Princípio da Superposição (2)
A descoberta experimental de que as forças se
combinam seguindo a regra da soma vetorial é de
enorme importância, pois também nos permite
expressar uma força em termos de seus vetores
componentes.
O Princípio da Superposição expresso em termos
das componentes das forças nos fornece o par de
equações:
𝑅𝑥 = 𝐹𝑥 e 𝑅𝑦 = 𝐹𝑦
26
Primeira Lei de Newton (1)
Primeira Lei de Newton ou
Princípio da Inércia
Podemos enunciar o Princípio da Inércia em duas
etapas:
Todo corpo em repouso tende a permanecer em
repouso, e assim ficará a menos que uma força
externa o obrigue a sair deste estado.
Todo corpo em movimento tende a permanecer
em movimento retilíneo uniforme, e assim ficará
a menos que uma força externa o obrigue a sair
deste estado.
27
Primeira Lei de Newton (2)
É interessante observar que, quando um corpo está em repouso
ou em movimento retilíneo uniforme, tem velocidade
vetorial constante.
Por outro lado, por “força externa” devemos entender
resultante, pois em um corpo podem agir simultaneamente
diversas forças.
Assim o Princípio da Inércia pode ser enunciado, mais
sinteticamente, da seguinte forma:
Quando a resultante das forças agentes num corpo é
nula, sua velocidade vetorial permanece constante.
Em símbolos:
𝑅 = 0 𝑣 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒:
𝑣 = 0 𝑅𝐸𝑃𝑂𝑈𝑆𝑂
𝑣 ≠ 0 𝑀. 𝑅. 𝑈.
28
Primeira Lei de Newton (3)
A
tendência de um corpo de se manter
em seu estado de movimento, resulta
de uma propriedade chamada inércia.
29
Primeira Lei de Newton (4)
Quando não existe nenhuma força atuando
sobre um corpo, ou quando existem diversas
forças com uma soma vetorial resultante
igual a zero, dizemos que o corpo está em
equilíbrio.
No equilíbrio, o corpo ou está em repouso
(equilíbrio estático) ou está em movimento
com
velocidade
constante
(equilíbrio
dinâmico).
Para que isso ocorra, cada um dos
componentes da força resultante deve ser igual
a zero:
𝐹𝑥 = 0 e 𝐹𝑦 = 0
30
Primeira Lei de Newton - Exemplo 1 (1)
Um livro de física em repouso sobre uma
mesa horizontal possui duas forças
atuando sobre ele:
1. Uma força de cima para baixo oriunda da
atração gravitacional que a Terra exerce
sobre ele (força de longo alcance que
atua sempre).
2. Uma força de baixo para cima oriunda da
reação de apoio da mesa (uma força de
contato).
A reação de apoio da mesa de baixo para
cima é igual à força da gravidade de cima
para baixo, de modo que a força resultante
que atua sobre o livro é igual a zero.
Assim, se o livro está em repouso sobre a
mesa, ele deverá permanecer em repouso.
31
Primeira Lei de Newton - Exemplo 2 (1)
Em um filme de ficção científica, uma
espaçonave se move no vácuo do espaço
sideral, longe de qualquer planeta ou corpo
celeste, quando seu motor para de funcionar.
Em virtude disso, a espaçonave diminui de
velocidade e fica em repouso.
Isto está correto? Como você aplica a
primeira lei de Newton a esse evento?
32
Primeira Lei de Newton - Exemplo 2 (2)
Pelo Princípio da Inércia, uma nave espacial
lançada para fora do sistema solar
prosseguirá sua viagem pelo vácuo durante
séculos sem gastar uma única gota de
combustível.
Nestas condições, estando a nave livre da
ação de quaisquer forças, continuará em
movimento retilíneo e uniforme com a
velocidade final do lançamento.
33
Primeira Lei de Newton - Exemplo 3 (1)
Força Centrífuga
Quando um carro faz uma curva plana horizontal,
sua tendência, devido à inércia, é continuar em
linha reta (reta tangente à curva em cada ponto).
Ele só consegue se manter na curva devido à
aderência entre os pneus e o chão.
Se, em um dado instante, o carro passar sobre
uma mancha de óleo, poderá derrapar e sair da
pista.
É comum ouvirmos como explicação para isto
que o carro foi “empurrado para fora da
curva pela força centrífuga”. Explicação
errada!!!
34
Primeira Lei de Newton - Exemplo 3 (2)
Força Centrífuga
Analisando o fenômeno à luz do Princípio da
Inércia, podemos explicar corretamente o
que ocorre, da seguinte forma:
◦ Ao passar pela mancha de óleo, deixa de haver
aderência entre os pneus e o chão.
◦ Assim, o carro continua, por inércia, com a
velocidade que tinha naquele instante em
movimento retilíneo e uniforme.
35
Segunda Lei de Newton ou
Princípio Fundamental (1)
Ao estudarmos o Princípio da Inércia, vimos
que, quando a força resultante em um ponto
material é nula, seu vetor velocidade
permanece constante:
𝑅 = 0 𝑣 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒
A Segunda Lei de Newton, também chamada
de Princípio Fundamental da Dinâmica,
estuda o que ocorre com a velocidade do
corpo quando a força resultante é não nula.
36
Segunda Lei de Newton ou
Princípio Fundamental (2)
Durante séculos acreditou-se que o efeito
dinâmico da ação das forças era produzir ou
manter a velocidade das partículas em que
agissem.
O Princípio da Inércia modificou esta visão:
Não se precisa de força para manter
velocidade.
Então qual é o efeito da ação de uma
resultante não nula sobre um ponto
material?
37
Segunda Lei de Newton ou
Princípio Fundamental (3)
Ora, se quando a resultante é nula, o vetor
velocidade permanece constante, então quando ela
é não nula, o vetor velocidade sofrerá variações.
Ou seja: O efeito de uma resultante não nula é o
de produzir uma aceleração no corpo ao qual
está aplicada.
Podemos, assim, enunciar o Princípio Fundamental
como segue:
A resultante das forças que agem num ponto material
comunica-lhe uma aceleração 𝒂 na mesma direção e
sentido. A intensidade desta aceleração é diretamente
proporcional à intensidade da resultante que a provoca.
38
Segunda Lei de Newton ou
Princípio Fundamental (4)
Em símbolos:
𝐹𝑅 = 𝑚 ∙ 𝑎
Nesta expressão, m é uma constante positiva,
característica do ponto material, denominada
massa inercial (ou simplesmente massa).
39
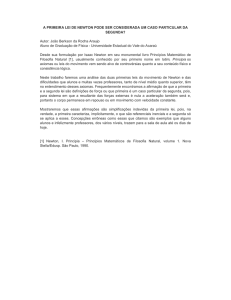
Componentes da Força Resultante (1)
Podemos sempre decompor a aceleração vetorial
em duas componentes:
1. Uma componente tangencial à trajetória e,
portanto, paralela à velocidade: 𝑎 𝑇 , que é a
aceleração tangencial.
2. Uma componente normal à trajetória: 𝑎𝐶 que
é a aceleração centrípeta.
𝑎𝑇
𝑎 = 𝑎 𝑇 + 𝑎𝐶
𝑣
t
𝑎𝐶
n
40
Componentes da Força Resultante (2)
Do Princípio Fundamental temos:
𝐹𝑅 = 𝑚 ∙ 𝑎
𝐹𝑅 = 𝑚 ∙(𝑎 𝑇 + 𝑎𝐶 )
𝐹𝑅 = 𝑚 ∙ 𝑎 𝑇 + 𝑚 ∙ 𝑎𝐶
Ao produto 𝐹𝑇 = 𝑚 ∙ 𝑎 𝑇 denominamos componente
tangencial da força resultante.
Ao produto 𝐹𝐶 = 𝑚 ∙ 𝑎𝐶 denominamos componente
centrípeta da força resultante.
41
Componentes da Força Resultante (3)
A componente tangencial da resultante é
responsável pela alteração do módulo da
velocidade: Só está presente em movimentos
acelerados e retardados.
A componente centrípeta da resultante é
responsável pela alteração da direção da
velocidade: Só está presente em movimentos
curvilíneos.
42
Componentes da Força Resultante (4)
Observações:
A aceleração vetorial e a força resultante têm
sempre a mesma direção e sentido.
A direção do movimento, isto é, a direção da
velocidade, não coincide necessariamente com a
direção da resultante.
Somente em movimentos retilíneos a
resultante e a velocidade têm a mesma direção.
43
Ângulo entre a Força Resultante e a
Direção do Movimento (1)
Para os diversos tipos de movimento, temos:
Tipo de Movimento
Ângulo entre 𝐹𝑅 e 𝑣
MRU
-
MRA
00
MRR
1800
MCU
900
MCA
00 < < 900
MCR
900 < < 1800
44
Massa Gravitacional (1)
A massa é uma constante característica de um
corpo e não se altera quando ele é levado de um
lugar para outro.
O peso de um corpo na superfície da Terra é a
força de atração gravitacional exercida pela Terra
sobre o corpo.
Os termos massa e peso são mal empregados e
considerados sinônimos no nosso cotidiano.
Por exemplo, não é correto falar: “Eu peso 50,5
kg.” O certo seria dizer: “A minha massa,
determinada indiretamente por pesagem, é igual a
50,5 kg.”
45
Massa Gravitacional (2)
Usando a atração gravitacional, podemos medir a massa de um
corpo utilizando um instrumento chamado balança.
Na balança de braços iguais procedemos da seguinte forma:
1.
Colocamos o corpo cuja massa queremos medir em um dos
pratos. Isto irá desequilibrar a balança.
2.
No outro prato, colocamos padrões de massa conhecida, até
que seja restabelecido o equilíbrio.
Realizando esta mesma experiência na superfície da Lua,
onde a atração gravitacional é aproximadamente 6
vezes menos intensa do que na Terra, verifica-se que a
quantidade de padrões necessários para restabelecer o
equilíbrio é exatamente a mesma que na Terra. Por quê?
46
Massa Gravitacional (3)
A massa do corpo, medida desta forma,
é denominada massa gravitacional,
pois utiliza a propriedade que a matéria
tem de sofrer atração gravitacional.
47
Massa Inercial (1)
O
que
representa
a
constante
de
proporcionalidade m que aparece na expressão do
Princípio Fundamental?
Fica fácil perceber o significado desta constante,
quando escrevemos esta equação do seguinte
modo:
𝐹𝑅
𝑎=
𝑚
Para uma dada força resultante , a aceleração é
tanto mais intensa quanto menor for m.
Isto quer dizer que m está relacionada com a
maior ou menor resistência que o ponto
material opõe à mudança de sua velocidade.
48
Massa Inercial (2)
A constante m é denominada medida
da inércia ou massa inercial, do ponto
material.
A experiência indica que esta constante
m está associada à quantidade de
matéria que o corpo possui.
49
Massa Inercial X Gravitacional (1)
Existem então dois tipos de massas: massa
gravitacional, obtida através de uma balança, e
massa inercial, que mede a dificuldade com que
se altera o estado inercial de um corpo.
É difícil empurrar horizontalmente uma pedra
grande porque ela possui massa inercial grande.
É difícil levantar uma pedra grande porque ela
possui peso grande.
Se levarmos esta mesma pedra para a superfície da
Lua, a dificuldade para empurrar a pedra
horizontalmente continuará sendo a mesma, porém
você conseguirá levantá-la mais facilmente.
50
Massa Inercial X Gravitacional (2)
Embora sejam conceitos distintos, verificouse experimentalmente que a massa inercial
(mi) é igual à massa gravitacional (mg):
m = mi = mg
51
Terceira Lei de Newton ou
Princípio da Ação e Reação (1)
Em um referencial inercial, se um corpo recebe a
ação de uma força, obrigatoriamente deve existir
um outro corpo que a está aplicando.
O Princípio da Ação e Reação analisa a
interação entre estes dois corpos, podendo ser
expresso como segue:
Quando um corpo A exerce uma força sobre um corpo B
(uma “ação”), então o corpo B exerce uma força sobre
o corpo A (uma “reação”). Essas duas forças têm o
mesmo módulo e a mesma direção, mas possuem sentidos
contrários. Essas duas forças atuam em corpos diferentes.
52
Terceira Lei de Newton ou
Princípio da Ação e Reação (2)
Em um par de forças ação e reação, qual das duas forças
é a ação? E qual é a reação?
É indiferente distinguir qual é a ação e qual é a reação.
A ideia fundamental contida no Princípio é a de que as
forças se manifestam sempre simultaneamente e aos
pares: não há ação sem reação.
Ação e reação são forças sempre de mesma natureza:
ambas elétricas ou ambas gravitacionais ou ambas de
contato, etc.
Ação e reação agem em corpos diferentes. Portanto,
não faz sentido dizer que ação e reação se neutralizam.
53
Terceira Lei de Newton ou
Princípio da Ação e Reação (3)
Exemplo da página 202 do Toledo.
54
Uso das Leis de Newton –
Resolução de Problemas (1)
As três leis de Newton contém todos os
princípios básicos necessários para a solução
de uma grande variedade de problemas de
mecânica.
Embora estas leis possuam formas muito
simples, sua aplicação em situações
específicas pode apresentar desafios reais.
Por esta razão, é necessário dominar algumas
técnicas, para resolver tais problemas.
55
Uso das Leis de Newton –
Resolução de Problemas (2)
Quando se utiliza a 1ª Lei de Newton, 𝐹 = 0, aplicada
a uma situação de equilíbrio, ou a 2ª Lei de Newton,
𝐹 = 𝑚𝑎 , aplicada a uma situação aonde não há
equilíbrio:
1. É necessário que se defina logo de início, o corpo
sobre o qual se está falando.
2. Após escolher o corpo, deve-se identificar as
forças que atuam sobre ele. (Aqui é importante
não confundir as forças que atuam sobre ele com as
forças exercidas por ele sobre outros corpos).
3. Para auxiliar a identificação das forças pertinentes,
desenhe um diagrama de corpo livre.
56
Diagrama de Corpo Livre (1)
Diagrama de corpo livre é um diagrama que
mostra o corpo escolhido “livre” das suas
vizinhanças, com vetores desenhados para mostrar
o módulo, a direção e o sentido de todas as forças
que atuam sobre o corpo.
57