Vetores e movimento em duas
dimensões
Posição e deslocamento
A trajetória é o caminho percorrido
por um objeto (planeta , cometa,
foguete, carro..). Qualquer ponto da
trajetória pode ser descrito pelo vetor
posição que denotamos por r(t).
O deslocamento r entre os pontos
rP e rQ é dado por
r = rQ – rP
Note que r não depende da origem
Posição e deslocamento
O vetor posição em 2-D fica definido
em termos das suas coordenadas
cartesianas por
r(t) = x(t)i + y(t)j
No caso espacial, 3-D, temos
r(t) = x(t)i + y(t)j + z(t)k
Velocidade e aceleração
Similar ao caso de 1-D,
a velocidade média é
r (t t ) r (t ) r x
y
vm
i
j
t
t t
t
A velocidade instantânea é
v lim
t 0
r (t t ) r (t ) dr
t
dt
ou em termos de componentes
d r (t ) dx dy
v
i
j
dt
dt
dt
ou
v vx i v y j
Velocidade e aceleração
Similar ao caso de 1-D,
a aceleração média é
v y
v (t t ) v (t ) v v x
am
i
j
t
t
t
t
A aceleração instantânea é
em termos de componentes
v (t t ) v (t ) dv
t 0
t
dt
a lim
dv d 2 r (t )
a
dt
dt 2
dv y
d v (t ) dv x
a
i
j
dt
dt
dt
ou
a ax i a y j
Componentes da aceleração
Componentes cartesianas
Componentes tangencial e
perpendicular
O problema inverso
Conhecida a aceleração,
podemos integrá-la e
a (t )
t
obter a velocidade, que
se integrada
v (t ) v0 a (t ) dt
t0
t
nos fornece a posição
r (t ) r0 v (t ) dt
t0
Este processo deve ser efetuado para cada componente
cartesiana do vetor considerado
Aceleração constante
• Aceleração constante movimento no
plano: plano formado pela velocidade
inicial e pelo vetor aceleração.
• Movimento fora do plano não é possível.
• A gravidade é um bom exemplo.
• Como ax e ay são constantes dois
problemas unidimensionais
independentes.
Aceleração constante
componente x de r
componente x de v
componente y de r
componente y de v
em t =0
1 2
x x0 v0 x t a x t
2
v x v0 x a x t
1 2
y y0 v0 y t a y t
2
v y v0 y a y t
r0 x0 i y0 j
v0 v0 x i v0 y j
Aceleração da gravidade
Nesse caso ay = -g e ax=0. Na direção x, vx é constante!
componente x de r
componente x de v
(constante)
componente y de r
componente y de v
em t =0
x x0 v0 x t
v x v0 x
1 2
y y0 v0 y t gt
2
v y v0 y gt
r0 x0 i y0 j
v0 v0 x i v0 y j
Aceleração da gravidade
Se tomamos x0 = y0 = 0 (saindo da origem)
de x = v0x t temos t = x/v0x
substituindo na equação para y
encontramos a equação da trajetória
y
v0 y
v0 x
1 g 2
x
x
2
2 v0 x
Equação de uma parábola!
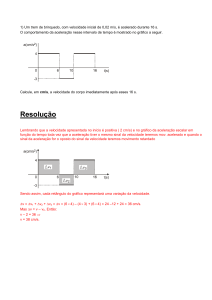
Foto estroboscópica do
movimento parabólico
Aceleração da gravidade
A coordenada y é independente
da velocidade vx.
Isto é ilustrado na figura ao lado
onde duas bolas são jogadas sob
ação da gravidade. A vermelha é
solta e a amarela tem velocidade
inicial vx.
Em cada instante elas têm
a mesma altura!!
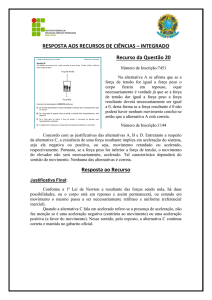
Aceleração da gravidade
Ex.: Bola sai do penhasco com v = 10 m/s na horizontal
Descreva o movimento.
A velocidade é
vx = 10 m/s
vy = (-9.8 m/s2) t
A posição é
x = (10 m/s) t
y = (-4.9 m/s2) t2
Aceleração da gravidade
Vetores r, v e a para t = 1s e t = 2s. Enquanto a é
constante r e v variam com o tempo.
Como varia o ângulo
dos vetores r e v?
vetor r:
tan = y/x = (-0.49 s-1)t
vetor v:
tan ’ = vy/vx = (-0.98 s-1)t
Alcance
Tempo para atingir altura
máxima h.
v0 y v0 sin 0
th
g
g
Alcance
Tempo para atingir altura
máxima h.
v0 y v0 sin 0
th
g
g
1 2 v0 sin 0
h v0 sin 0t h gt h
2
2g
2
O alcance R acontece em t = 2 th:
2v0 sin 0
R v0 x 2t h v0 cos 0
sin 2 0
g
g
v2
0
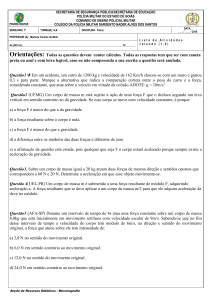
Alcance
Alcance máximo
R
v
2
0
g
sin 2 0
Para um valor fixo do
módulo da velocidade
inicial o alcance máximo
acontece para 2 0 / 2
ou seja 0 450
Rmax
v 20
g
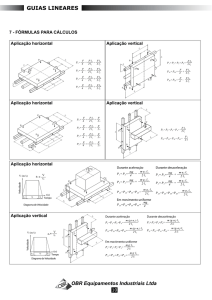
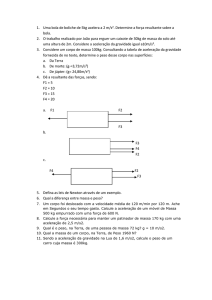
Exemplo
Bola sobre a mesa cai de altura H = 80 cm com velocidade
inicial v0 = 2.1 m/s. Qual a distância D onde ela atinge o
piso?
A altura H é dada por
1 2
2H
H gt H , t H
2
g
A vel. horizontal se mantém
constante
D v0t H v0
2H
g
2 0.80m
D 2.1m / s
85 cm
2
9.8m / s
Exemplo
Canhão atira bolas com vel. v0 portanto seu raio
máximo é Rmax =v02/g. Mostre que para atirar
em um alvo com menor distância existem dois
ângulos 0 possíveis. v0 = 100 m/s, D = 800m
gR
R
sin 2 0 2
v
Rmax
0
Usando os dados numéricos
temos Rmax = 1019 m
800
sin 2 0
0.785
1019
2 01 520 , 2 02 1280
ou
01 260 , 01 640
Movimento circular e uniforme
Este movimento tem velocidade com módulo constante
porém sua direção muda continuamente
Exemplos:
Movimento de satélites artificiais.
Pontos em um disco de vitrola.
Disco rígido de computador.
Nós como partículas girando com
o movimento da terra.
Movimento circular e uniforme
Usamos coordenadas polares
( , )
Daí, o arco fica
onde
s R
R ; fixo
Como o raio é constante,
a única variável é
Movimento circular e uniforme
Como o raio é constante,
a única variável é . A
posição angular é uma
função do tempo, (t ) . O
arco descrito em t é dado
por s R . Então,
ds
d
vR
dt
dt
Definimos assim a
velocidade angular
ds
v R
dt
d
dt
Movimento circular e uniforme
Uma volta completa
2 R vT
Período do movimento
2 R 2
T
v
Frequência
Velocidade angular e frequência
1
f
T
Unidades
T s
2 f
1
f s 1 Hz
T
Interpretação da velocidade
angular
ω
O modulo da velocidade
v R
δφ
O vetor associado vem de um
produto vetorial
ω
v
R
v ω R
Movimento circular e uniforme
r v
r
v
v v r
Aceleração média
t r t
No limite t 0
v v
r
a lim
lim
t 0 t
r t 0 t
Aceleração instantânea
v2
a
r 2
r
Movimento circular e uniforme
Aqui podemos também
usar um vetor unitário
(note que este vetor
varia com o movimento)
r
rˆ
r
A aceleração cujo módulo vimos, fica:
2
v
a rˆ
r
Tem direção do vetor posição
e aponta para o centro do
movimento. Está é a
aceleração centrípeta.
Movimento circular e uniforme
Exemplo: Peão roda uniformemente com 16 Hz. Qual
é a aceleração centrípeta de um ponto no raio do
peão em R = 3 cm
Velocidade angular é
2 f
2 rad(16 Hz ) 101rad/s
Daí a aceleração fica
a r 303 cm s
2
2
Movimento helicoidal
Exemplo de movimento tridimensional: considere
uma partícula cuja posição varia como
r (t ) R cos t i R sin t j v z t k
R, e v z constantes.
A velocidade
v (t ) R sin t i R cos t j v z k
A aceleração
a (t ) R cos t i R sin t j
2
2
Movimento helicoidal
No plano xy a partícula tem
x(t ) R cos t
O módulo da velocidade v xy (t )
v xy (t ) R
y (t ) R sin t
Movimento periódico onde
T 2 /
A aceleração
a xy (t ) 2 rxy (t )
O módulo
a xy (t ) R
2
Movimento helicoidal
Podemos compor este movimento no plano com o
movimento em z. Note que a partícula anda uma
altura h em um período do movimento no plano
h v zT 2 v z /
A cada período T a partícula
se desloca de h no plano z
descrevendo um movimento
helicoidal!
Movimento circular acelerado
Consideremos agora o caso em
que a velocidade angular não é
constante. Então,
ds
d
v(t ) R
dt
dt
é o módulo da velocidade que
também varia no tempo e a
velocidade angular é dada por
d
(t )
const.
dt
Movimento circular acelerado
Como o módulo da velocidade
também varia há uma componente
tangencial da aceleração dada por
dv(t )
d (t )
R
R (t )
dt
dt
onde (t ) é a aceleração angular
d (t )
(t )
dt
Movimento circular acelerado
A aceleração do corpo é dada por
v N (t )
v (t )
vT (t )
lim
lim
lim
t 0 t
t 0
t 0
t
t
v (t t )
R
v N
dv (t )
a (t )
a N (t ) aT (t )
dt
v
v (t )
vT
Movimento circular acelerado
Aceleração total; soma de uma componente tangencial
e uma normal
dv (t )
a (t )
a N (t ) aT (t )
dt
ou ainda
v
a (t )
R
v
r
ˆ
ˆ
R
a (t )
a N (t )
R
v (t )
aT (t )
2
T
aN (t )
a (t ) a N2 (t ) aT2 (t )
Movimento circular acelerado
Pelas definições da aceleração e velocidade angulares
temos
d (t )
(t ) (t ) 0 (t )dt
dt
t0
t
d (t )
(t ) (t ) 0 (t )dt
dt
t0
t
Movimento circular acelerado
Quando a aceleração angular é constante temos o
chamado movimento circular uniformemente acelerado
d (t )
(t ) 0 (t t0 )
dt
d (t )
1
(t ) (t ) 0 0 (t t0 ) (t t0 ) 2
dt
2
e
2 02 2 ( 0 ) 2
Em perfeita analogia com movimento linear uniformemente
acelerado!
Exemplo
Um disco possui uma aceleração angular de 2 rad/s2.
Supondo que o disco inicie o seu movimento com velocidade
angular nula, pede-se:
a) a velocidade angular do disco depois que ele girou de 200,
e
b) o tempo gasto para ele atingir esta velocidade angular.
2
a) 2
2(2 ) / 9 rad / s (2 / 3) rad / s
b) t t ( 2 / 3) / 2 s (1 / 3) s
Movimento relativo
• O movimento de um determinado objeto é
conhecido em um dado sistema de coordenadas A
• Conhecemos o movimento de um segundo
sistema de coordenadas B com respeito ao primeiro
• Desejamos conhecer o movimento do objeto em
relação ao novo sistema de coordenadas
Movimento relativo
B
r r rAB
A
r
rAB
rA r
r
Mas se são
todas funções
do tempo
r (t ) r (t ) rAB (t )
rB r
Movimento relativo
v
v
Velocidade relativa
dr drAB dr
dt
dt
dt
v v AB v
vA v
vB v
v AB
v AB
v
v
Movimento relativo
a
a
Aceleração relativa
dv dv AB dv
dt
dt
dt
a a AB a
aA a
aB a
a AB
a AB
a
a
Exemplo
Um indivíduo deixa cair um objeto dentro de um elevador
que sobe com velocidade de 1/2 m/s. Pede-se:
a) A aceleração do objeto relativa ao
elevador tão logo deixe a mão do
1/2 m/s
indivíduo
b) A velocidade do objeto com relação
ao solo após 1/10 s.
a)
a a AB a ; a AB 0
g zˆ
a a g 10m / s 2 zˆ
A B
ẑ
x̂
b) v v AB v
v v AB v0 a t
v 0,5 m / s zˆ