Servomecanismo
N7SRV
Prof. Dr. Cesar da Costa
6.a Aula: Controladores Eletronicos
Constituicão Básica do Controlador Eletronico
Constituicão Básica do Controlador Eletronico
O controle de equipamentos para acionamentos industriais é
comumente realizado por intermédio de um microprocessador
embarcado no produto, o qual carrega um programa armazenado
composto de algoritmos dedicados à aplicação em questão.
Muitas vezes um único processador acumula, além das funções de
controle, também as funções de diálogo com o operador e
comunicações com outros dispositivos, através de redes industriais
(também conhecidas como barramentos de campo).
Constituicão Básica do Controlador Eletronico
Para que seja possível integrar em software as sofisticadas técnicas
de controle utilizadas atualmente no acionamento de máquinas
elétricas, juntamente com outros módulos de programas que
assegurem conectividade em rede e interface amigável com o
operador, tudo isso a custo competitivo, é necessário escolher
adequadamente o processador a ser utilizado.
O tipo de microprocessador que melhor se presta a esta categoria de
aplicações costuma ser aquele que integra na mesma pastilha de
silício, além da unidade central de processamento (CPU), também
circuitos de memória e uma diversidade de circuitos auxiliares
(periféricos) dedicados a funções de entrada e saída (E/S) específicas,
tais como conversão analógico-digital (A/D) e saídas digitais
moduladas por largura de pulso (PWM).
Constituicão Básica do Controlador Eletronico
Com relação à arquitetura interna da CPU, os processadores
atualmente disponíveis no mercado podem ser classificados em
quatro grupos principais:
• Os que possuem arquitetura de Von Neuman (CISC – Complex
Instruction Set Computer);
• Os de arquitetura de Harvard (CISC – Complex Instruction Set
Computer);
• Os de arquitetura RISC (Reduced Instruction Set Computer),
arquitetura utilizada pelo servoconversor WEG SCA-05).
Os de arquitetura FPGA (Field Programmable Gate Array),
arquitetura utilizada pela National Instruments.
Constituicão Básica do Controlador Eletronico
Arquitetura de Von Neuman
É processada uma única informação por vez, visto que nessa
tecnologia, execução e dados percorrem o mesmo barramento, o que
torna a arquitetura mais simples, porém torna o processo lento em
relação à arquitetura Harvard.
Arquitetura de Harvard
Caminhos de dados e de instrução distintos, dessa forma, seus
componentes internos também estão dispostos em lugares distintos, o
que a torna mais rápida, porém mais complexa.
Constituicão Básica do Controlador Eletronico
Concluímos que a principal diferença entre as duas arquiteturas
apresentadas é que a arquitetura de Harvard separa o
armazenamento e o trafego das instruções da CPU e dos dados em
duas unidades distintas de memória, enquanto a Von Neumann
utiliza o mesmo espaço de memória para ambos.
Nas CPUs atuais, é mais comum encontrar a arquitetura Von
Neunmann, por ser uma arquitetura mais simples, mas devido
a
necessidade
de
se
aumentar
o
desempenho,
algumas características
da arquitetura Harvard também são
encontradas.
Constituicão Básica do Controlador Eletronico
Arquitetura de Von Neuman
Constituicão Básica do Controlador Eletronico
Arquitetura Havard:
Constituicão Básica do Controlador Eletronico
Arquitetura RISC
RISC (Reduced Instruction Set Computer ou Computador com um
Conjunto Reduzido de Instruções) é uma linha de arquitetura de
processadores, que favorece um conjunto simples e pequeno de
instruções, que levam aproximadamente a mesma quantidade de tempo
para serem executadas.
A maioria dos microprocessadores modernos são RISCs. O tipo de
microprocessador mais largamente usado em desktops, o x86, é mais
CISC do que RISC, embora chips mais novos traduzam instruções x86
baseadas em arquitetura CISC, em formas baseadas em arquitetura
RISC mais simples, utilizando prioridade de execução.
Constituicão Básica do Controlador Eletronico
RISC – Reduced Instruction Set Computer
Todas as arquiteturas
apresentadas anteriormente
são conhecidas como máquinas
de estado sequencias, que
funcionam segundo o fluxogram
apresentado na Figura 4.2.
A Figura 4.3 apresenta um diagrama de tempos envolvidos na
execução de um ciclo de instrução.
Nota-se que o ciclo de instrução é igual à soma do ciclo de busca com
o ciclo de execução; o ciclo de máquina M corresponde ao tempo que o
microprocessador leva para acessar um endereço de memória ou um
dispositivo de entrada e saída, e o estado T é um período de tempo que
está vinculado ao clock do sistema. Também é a unidade de tempo,
que determina o tempo consumido na execução do ciclo de instrução.
Como a operação de somar os dois números consome um total de
23 estados, temos um ciclo total de instrução de 5,75 μs. Cerca de
2,3 μs (40% do ciclo total) são gastos com ciclos de busca de
instruções em memória.
O ciclo de busca é um tempo de processamento perdido, presente
em todos os ciclos de instruções dos controladores digitais
microprocessados, que não pode ser eliminado, pois a arquitetura
interna dos microprocessadores tradicionais não permite a sua
reconfiguração por hardware ou software
Constituicão Básica do Controlador Eletronico
Arquitetura FPGA
O FPGA é um dispositivo que suporta a implementação de circuitos
lógicos relativamente grandes.
Consiste em um grande arranjo de células lógicas ou blocos lógicos
configuráveis contidos em um único circuito integrado.
Cada célula contém capacidade computacional para implementar
funções lógicas e realizar roteamento para comunicação entre elas.
O primeiro FPGA disponível comercialmente foi desenvolvido pela em
presa Xilinx Inc., em 1983.
Constituicão Básica do Controlador Eletronico
Arquitetura FPGA
Os FPGAs são um grande arranjo de células configuráveis que podem ser
utilizadas para a implementação de funções lógicas.
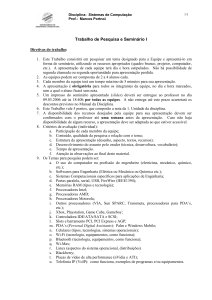
A Figura ilustra a estrutura interna simplificada de um FPGA. Basicamente é
constituída de blocos lógicos, blocos de entrada e saída, e chaves de
interconexão.
Constituicão Básica do Controlador Eletronico
Arquitetura FPGA
Basicamente é constituída de blocos lógicos, blocos de entrada e saída, e
chaves de interconexão.
Os blocos lógicos formam uma matriz bidimensional, e as chaves de
interconexão são organizadas como canais de roteamento horizontal e
vertical entre as linhas e colunas de blocos lógicos.
Esses canais de roteamento possuem chaves de interligação programáveis
que permitem conectar os blocos lógicos de maneira conveniente, em
função das necessidades de cada projeto
Constituicão Básica do Controlador Eletronico
Arquitetura FPGA
Nos sistemas embarcados, o processamento digital de sinais DSP é
necessário para realizar operações aritméticas intensas, tais como
multiplicação, adição e divisão.
Essas operações, dependendo do tamanho e complexidade, podem ser
executadas por dois tipos de hardwares: (i) processadores DSP tradicionais;
(ii) dispositivos FPGA.
A seleção de hardware mais adequado é determinada pela aplicação, custo,
desempenho ou uma combinação delas. A grande necessidade em uma
aplicação de processamento digital de sinais é a capacidade e a velocidade
de processamento requerida.
As aplicações mais comuns são: (i) filtragem; (ii) análise de frequência do
sinal por Transformada Rápida de Fourier (FFT); (iii) operações aritméticas
como multiplicar e dividir.
Constituicão Básica do Controlador Eletronico
Devido à simplicidade dos seus circuitos internos, os
microcontroladores com CPU do tipo RISC tendem a operar com
maior eficiência (menor consumo de energia) com freqüências de
clock mais elevadas.
Também por este motivo, é possível integrar quantidades muito
maiores de memória junto com a CPU e os circuitos periféricos na
pastilha de silício (chip) que constitui o microcontrolador. Com isso
torna –se viável a incorporação de novas facilidades ao software de
controle do produto, com menor impacto nos custos de produção
Constituicão Básica do Controlador Eletronico
Outra importante diferença encontrada entre famílias distintas de
microcontroladores reside no comprimento de palavra nativo da
CPU, que normalmente vai de 8 a 32 bits.
De um modo geral, os microcontroladores com palavras maiores são
mais eficientes na execução de algoritmos matemáticos, como por
exemplo os que costumam ser empregados para o acionamento de
máquinas elétricas.
Isto pode acabar se refletindo na precisão e no desempenho
dinâmico dos controles efetuados pelo microcontrolador.
Constituicão Básica do Controlador Eletronico
Em aplicações típicas de controle digital, a execução dos algoritmos
de controle precisa ocorrer a intervalos de tempo regulares. No caso
particular do controle de dispositivos eletromecânicos, é comum que
estes intervalos de tempo sejam muito reduzidos, da ordem de 104 seg
além de não serem toleráveis grandes variações nos mesmos.
Estes aspectos caracterizam o software a ser utilizado neste caso
como sendo programas de tempo real crítico. Em programas assim,
a sincronização da execução dos algoritmos de controle é
frequentemente obtida através de mecanismos de interrupções
produzidas por circuitos temporizadores internos ao microcontrolador.
Tipos de Processadores
Podem-se dividir os processadores digitais em três tipos:
a) Microcontroladores;
b) Processadores DSP;
c) Processadores FPGA.
Microcontroladores
Os microcontroladores são microprocessadores que podem ser
programados para funções específicas. Em geral, eles são usados
para controlar circuitos e, por isso, são comumente encontrados
dentro de outros dispositivos, sendo conhecidos como "controladores
embutidos". A estrutura interna de um microcontrolador apresenta um
processador, bem como circuitos de memória e periféricos de entrada
e saída.
Com freqüências de clock de poucos MHz (Megahertz) ou talvez
menos, os microcontroladores operam a uma freqüência muito
baixa se comparados com os microprocessadores DSP ou os
processadores FPGAatuais, no entanto são adequados para a
maioria das aplicações usuais, como por exemplo, controlar uma
máquina de lavar roupas ou uma esteira de chão de fábrica.
Microcontroladores
O seu consumo em geral é relativamente pequeno, normalmente na
casa dos miliwatts e possuem geralmente habilidade para entrar em
modo de espera (Sleep ou Wait) aguardando por uma interrupção
ou evento externo, como por exemplo o acionamento de uma tecla,
ou um sinal que chega via uma interface de dados.
O consumo destes microcontroladores em modo de espera pode
chegar na casa dos nanowatts, tornando-os ideais para aplicações
onde a exigência de baixo consumo de energia é um fator decisivo
para o sucesso do projeto.
Microcontroladores
Fabricantes de Microcontroladores:
Microchip;
Atmel;
Freescale
Microcontroladores
Característica
HC08
HCS08
pinagem
8/16 pinos
8/16/28 DIP
Até 64 LQFP
Tensão de operação
3 ou 5V
1,8 à 3,6V
A/D
4 canais 8bits
8 canais 10 bits
Interrupção de
Tempo Real
-----------
1 módulo (relógio)
Baixo consumo
2 Modos
5 Modos
Frequência
8MHz (5V)
4MHz (3V)
Até 40MHz
Corrente de saída
15 a 25mA
2 a 10mA
Microprocessadores DSP
Os DSPs são microprocessadores com características próprias que
podem ser programados e operam em tempo real, com velocidades
muito superiores aos microcontroladores para aplicações genéricas.
A capacidade de processar grandes quantidades de números em
pouco tempo é um dos principais benefícios que os Processadores
Digitais de Sinais oferecem ao mundo da eletrônica.
DSP acima de tudo é um dispositivo programável, que detêm seu
próprio código de instruções. Cada empresa que cria o seu
processador cria também o seu ambiente de desenvolvimento (IDE)
próprio para aquele tipo de chip, tornando dessa forma a manipulação
do microprocessador muito mais fácil e rápida.
Microprocessadores DSP
A capacidade de processamento em tempo real dos DSP ́s torna este
processador perfeito para aplicações onde o delay (tempo de
resposta) não é tolerável, como por exemplo em um telefone celular.
A capacidade que os DSPs têm de repetir (com uma instrução prévia,
por exemplo "RPT") em extrema velocidade uma instrução complexa
(como por exemplo a "MPYA": "Multiply and Accumulate Previous
Product") que faz com que sejam rapidamente resolvidas, por
exemplo, as Transformadas Rápidas de Fourier (FFT), permitindo a
implementação de filtros digitais.
Estes filtros são muito usados em telecomunicações, por exemplo
para decodificar a sinalização (DTMF, MFC, etc).
Microprocessadores DSP
Principais aplicações:
Filtragem digital
Microprocessadores DSP
Principais aplicações:
Compressão e descompressão de sinais
O uso dos DSPs associados a algoritmos de compressão permitiu a
implementação de diversas tecnologias de CODEC’s. CoDec é o
acrônimo de Codificador/Decodificador, dispositivo de hardware ou
software que codifica/decodifica sinais.
Exemplos de chips DSP são o DSP542 e DSP549 fabricados pela Texas
Instruments e usados pela CISCO Systems em seus gateways VoIP
[CISCO- CODEC1]
Microprocessadores DSP
Principais aplicações:
A tecnologia DSP está presente atualmente em infinitos
dispositivos como celulares, computadores multimídia, gravadores
de vídeo, CD players, controladores de disco rígido, modems e
televisores. Esta presente nas mais diversas áreas, como militar,
médica, científica e automotiva.
Microprocessadores DSP
A figura ilustra o diagrama do ADSP-21160M da Analog Devices. Esse
DSP possui as seguintes especificações técnica:
Microprocessadores DSP
Principais características técnicas:
Microprocessadores DSP
Principais características técnicas:
Processadores FPGA
No projeto de hardware do processador core, utiliza-se uma interface
gráfica com o usuário (GUI), denominada SOPC Builder, que permite
ao projetista customizar o processador para uma aplicação particular.
Os parâmetros de configuração incluem tamanho do barramento, tipo
de memória, espaço de endereçamento, registros de propósito geral e
específico, UART, controla dores de Ethernet, etc.
Uma vez, que os parâmetros de hardware do processador core é
definido na interface gráfica SOPC Builder, o processador core NIOS II
é criado na forma de um arquivo HDL.
Processadores FPGA
Configurável por software;
O usuário cria o seu processador de acordo com as suas
necessidades.
Processadores FPGA
Pode chegar a uma velocidade de 900 Mhz
Processadores FPGA
Desempenho
Aproveitando-se do paralelismo do hardware, os FPGAs excedem o
poder dos processadores digitais de sinais (digital signal processors –
DSPs) quebrando o paradigma de execução sequencial e realizando
mais por um ciclo de clock.
A BDTI, uma notável empresa de realização de benchmarks, lançou
benchmarks mostrando como os FPGAs podem oferecer muitas vezes
o poder de processamento por dólar de uma solução DSP em algumas
aplicações.
Controlar entradas e saídas (E/S) no nível do hardware fornece tempos
de resposta muito mais rápidos devido à funcionalidades
especializadas para aproximar aos requisitos da aplicação.
Processadores FPGA
Recursos
Obs: Ao analisar as especificações de um chip FPGA, note que elas são divididas
em blocos lógicos configuráveis, células lógicas, lógica de função fixa como
multiplicadores e recursos de memória como bloco de RAM integrada.
Controladores Digitais
Podem-se dividir os controladores digitais em dois tipos:
a) Controladores digitais dedicados;
b) Controladores lógicos programáveis, também conhecidos
como CLPs.
c) Controladores lógicos programáveis baseados em FPGA
Controladores Digitais
1. Controladores digitais dedicados :
Os controladores digitais dedicados são basicamente
aplicações de microcontroladores tradicionais (família 8051,
por exemplo), em tarefas de controle cujo propósito específico
é executar um algoritmo de controle gravado em sua memória
EPROM, e em geral comunicar-se com dispositivos externos
para troca de informações e atuação neles.
Controladores Digitais
Como, por exemplo, medição e controle de temperatura,
ligar /desligar motores, ler um teclado em sua entrada,
controlar um motor DC, ler um encoder etc.
Programa-se a EPROM com códigos de máquina, linguagem
Assembler ou linguagem C.
O projetista deve conhecer bem o conjunto de instruções do
microcontrolador utilizado, seu hardware e a tarefa de controle
a ser realizada.
Exemplos de Controladores Digitais Dedicados
Controlador Digital Multi-Loop Smar CD 600
• O CD600 é um poderoso controlador digital, microprocessado, de processos,
capaz de controlar simultaneamente até 4 malhas de controle, com até 8 blocos
PID e mais de 120 blocos de controle avançado.
Controladores de Temperatura