PPgEE - UFRN
Tese de Doutorado
PLATAFORMA DE EMBARQUE PARA IMPLEMENTAÇÃO
DE FUNÇÕES DE CONTROLE DE TEMPO REAL EM
REGULADORES DE TENSÃO UTILIZADOS EM REDES DE
DISTRIBUIÇÃO DE ENERGIA ELÉTRICA.
Doutorando:
José Alberto Nicolau de Oliveira
Orientador:
Prof. Dr.-Ing. Manoel Firmino de Medeiros Jr.
Co-orientador:
Prof. Dr. Ivan Saraiva Silva
1
Proposta
● Desenvolvimento de uma plataforma de embarque para
automação e controle, em tempo real, de equipamentos
reguladores de tensão, usados em redes de distribuição
de energia elétrica.
● Implementação de um circuito que, a partir do ajuste das
tensões de saída de um banco regulador trifásico, forneça
níveis adequados de tensão em determinados nós de um
alimentador.
2
Sumário
● Introdução: contextualização do problema
● Regulação de tensão
● Sistemas embarcados de tempo real
● Projetos Baseados em Plataforma
● Definição da Plataforma Alvo
● Definição das tensões de regulação baseada na
linearização de parâmetros de sensibilidade
3
Sumário
● Avaliação dos efeitos causados, em redes de distribuição
trifásicas, por variações de tensões impostas nas saídas
dos reguladores.
● Implementação e teste da Plataforma Alvo
● Conclusão
● Trabalhos publicados
● Dedicatórias e agradecimentos*
4
Introdução: contextualização do problema
● O objetivo primário de qualquer sistema de distribuição de
energia elétrica é garantir qualidade do fornecimento de
energia aos seus consumidores.
● Principais fatores que prejudicam a qualidade:
● a regulação da tensão no ponto de entrega de cada
consumidor fora de padrões estabelecidos.
● os centelhamentos causados pelas repetitivas e rápidas
mudanças de tensão na rede de distribuição.
● os desbalanceamentos de cargas - responsáveis pelos
desequilíbrios nas tensões entre as fases.
5
Introdução: contextualização do problema
● Como atenuante a estes problemas, as fornecedoras de
energia elétrica optam por incluir reguladores de tensão ou
bancos de capacitores ao longo do alimentador.
● No entanto, a distribuição destes equipamentos é
fortemente dependente da topologia da rede e totalmente
orientada por exaustivas análises de fluxos de carga.
● Análises estas feitas em suas unidades de planejamento
onde, são consideradas regras cotidianas previsíveis e
mudanças sazonais de carregamento.
● Em geral, carregamentos fixados em todas as seções do
alimentador seguindo padrões similares.
6
Introdução: contextualização do problema
● No caso do uso de reguladores, ainda são premissas do
engenheiro de planejamento definir:
● sobre a melhor localização do regulador no alimentador;
● que tensão deverá ser mantida em sua saída;
● que ajustes devem ser feitos no circuito LDC do
regulador para que se tenha a tensão desejada em um
determinado ponto remoto.
● Ressalva: o modelo do LDC é o de um circuito estático
simplificado (r + jx), definido por suposições de cargas
uniformemente distribuídas, continuamente violadas e,
em curto prazo, não mais representativas da rede.
7
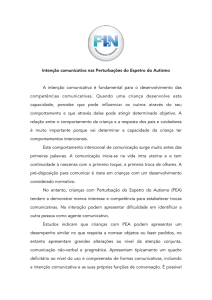
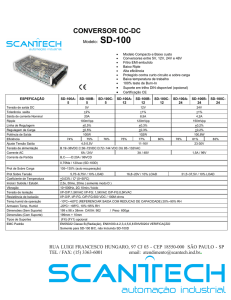
Esquema elétrico de um regulador de tensão
+
1
2
3
S
TC
r
L
x
4
5
V1
V2
I/tc
Vr
6
TP
7
x
r
8
N
V/tp
VSC
SL
8
Regulação de tensão
● Princípios de regulação de tensão
● Modelagem do regulador de tensão
● Lógica de controle dos reguladores de tensão atuais
● Procedimentos atuais de controle dos reguladores de tensão
● Ajustes do LDC em sistemas com regulação remota
● Avaliação dos procedimentos de ajuste do LDC
● Proposições para ajustes da regulação de tensão em tempo
real
9
Princípios de regulação de tensão
● Padrões internacionais de regulação de tensão exigem que
os sistemas de distribuição atendam a seus consumidores
com uma tensão dentro de uma faixa prescrita de valores.
● A ANEEL, através da resolução no 505, que dispõe sobre a
conformidade dos níveis de tensão de energia elétrica em
regime permanente, define que, em condição normal:
● a tensão de atendimento deve situar-se entre 95% e
105% da tensão nominal de operação do sistema no
ponto de entrega ou de conexão.
10
Modelagem do regulador de tensão
S1
F
V1
Is
Zs
+
Vs
I
-
S2
C
V2
Zd
Id
+
V2 = V1 – IsZs – Vs
Vd = V2 – IdZd – Vref
Vs = Vd / n
IL = Is – Id
S1 = V1 .Is*
S2 = V2 . IL*
Vd
-
Vref
FC
ANSI Tipo B
11
Lógica de controle dos reguladores de tensão
atuais
● Os controles atuais dos reguladores de tensão incorporam
lógica digital e tecnologia microprocessada, normalmente de
8 bits, associadas a um conversor A/D.
● A lógica de controle de operação é disparada sempre que a
tensão medida no TP do regulador apresentar um valor fora
de uma faixa pré-estabelecida de tensões de ajuste.
● Por exemplo, entre 119 V e 121 V para uma tensão de
base 120 V e uma largura de faixa de 2 V
12
Procedimentos atuais de controle dos reguladores
de tensão:
● 1. se a tensão no TP mover-se para um nível fora da faixa, a
amostra do sinal, em formato digital, é fornecida ao P;
● 2. o P, reconhecendo esta condição de tensão, dispara um
circuito de tempo de retardo (tr) de 30 s;
● 3. durante o tr, a tensão continua sendo medida. Se moverse para a faixa, a operação de ajuste é encerrada.
● 4. persistindo a condição fora de faixa, ao término do tr, uma
mudança de tap é iniciada;
● 5. após a mudança de tap, é feita uma pausa de 2 s. Após
essa pausa, se a tensão ainda estiver fora da faixa, outra
mudança de tap é iniciada. Este procedimento se repete até
que a tensão volte para a faixa.
13
Ajustes do LDC em sistemas com regulação
remota
● Fórmulas sugeridas pela Cooper Power System, para ajuste
de R e X do LDC
( I ct x RL )
Rs
ntp
( I ct x X L )
Xs
ntp
● Onde:
● Rs e Xs são a resistência e a reatância do LDC em Volts
● RL e XL são a resistência e a reatância da linha em Ohms
● Ict é a corrente nominal primária do TC em Ampères e
● ntp é a relação de transformação do TP
14
Avaliação dos procedimentos de ajustes do LDC
● Influencia negativamente no desempenho do regulador já
que leva em conta apenas as quedas de tensão resistiva e
reativa do regulador até o ponto de regulação.
● Pressupõe o sistema equilibrado e que os transformadores
presentes no alimentador funcionam em sua capacidade
nominal.
● Como não utiliza um fluxo de carga, faz uma aproximação
considerando a carga total em um ponto médio, o que na
prática, leva a erros de dimensionamento.
15
Proposições para ajustes da regulação de tensão
em tempo real
● O ajuste de tensão ideal seria aquele que fizesse com que
todas as tensões do alimentador, a jusante do regulador, se
igualassem as suas tensões nominais, mas, tecnicamente
inviável.
● Entretanto, segundo Medeiros e Pimentel, será possível,
através da otimização de uma função objetivo, elevar o
perfil de tensão, aproximando-o do perfil regular nominal.
● Para tal, torna-se necessário embarcar, no regulador, todas
as informações da rede que viabilizem, em tempo real, a
execução de cálculos de fluxo de carga e de estimação de
estado. Opção imaginada, a priori, com sérias restrições
espaciais e temporais.
16
Proposições para ajustes da regulação de tensão
em tempo real
● A alternativa apresentada é de se obter, off line, a partir de
cálculos de fluxos de cargas, dados que caracterizem o
comportamento de um alimentador, quando submetido a
variações de tensão ou de carga, que possam ser
relacionados a parâmetros de sensibilidade das grandezas
da rede e que viabilizem o embarque, no regulador, de um
algoritmo de ajuste de tensão em tempo real.
● Embora os reguladores possam fornecer medições de
corrente e tensão em tempo real, buscou-se controlar o
perfil de tensão da rede a partir, apenas, de medições de
tensão.
17
Sistemas embarcados de tempo real
● Conceitos gerais
● Requisitos e definição do RTOS
● Quadros comparativos de RTOS
18
Conceitos gerais
● Um sistema de tempo real (RTS) se caracteriza por interagir
continuamente com o seu ambiente, enviando respostas,
em prazos específicos, a estímulos de entrada (sistema
computacional reativo).
● O atendimento desses prazos exige que um RTS e o seu
RTOS apresentem requisitos precisos de natureza temporal
onde, o seu funcionamento dependa não só da integridade
dos resultados obtidos, precisão lógica, como também do
tempo em que eles são produzidos, precisão temporal.
● Uma reação que ocorra além do prazo especificado pode
ser sem utilidade ou até representar uma ameaça iminente.
19
Requisitos e definição do RTOS
● Na escolha do RTOS considerou-se, principalmente,
requisitos que garantissem que a aplicação se comportasse
como um sistema de tempo real crítico seguro a falhas,
onde, o mais importante era a previsibilidade e não a
rapidez de cálculo.
● Outras funcionalidades, tais como escalonamento de tarefas
e threads, tipo de scheduler, mecanismos de comunicação e
sincronização entre tarefas, tratamento otimizado de
interrupções e ports p/ processadores alvo reconfiguráveis
influenciaram fortemente na escolha do RTOS.
● Os RTOS analisados foram o eCos, o Salvo, o µC/OS II e o
CMX-RTX. Optando-se pelo µC/OS II.
20
Quadros exemplos, comparativos de RTOS
Custo de Desenvolvimento
Principais processadores alvo
eCos
0 – US$ 5,000
eCos
Intel x86, ARM, MIPS, ...
Salvo
0 – US$ 800
Salvo
Intel x86, PIC, TMS
µC/OS-II
US $ 75
µC/OS-II
Intel x86, ARM, MIPS, PIC, ...
NIOS, MicroBlazer (reconfig.)
CMX-RTX
Varia, inicia em $2,000
CMX-RTX Sim* (ARM)
Quantidade de ROM para o Kernel
(min, max)
Quantidade de RAM para o Kernel
(min, max)
eCos
1.250 bytes, 300 kbytes
eCos
600 bytes, dep. da aplicação
Salvo
1 kbyte, 2 kbytes
Salvo
50 a 100 bytes
µC/OS-II
5 kbytes, 20 kbytes
µC/OS-II
300 bytes, 2 Kbytes
CMX-RTX
1 kbyte, 6 kbytes
CMX-RTX 512 bytes, 2 kbytes
21
Projetos Baseados em Plataforma (PBP)
● Conceito e orientações gerais
● Estratégias de Projetos Baseados em Plataforma
● Metodologia de PBP centrada no meio de comunicação
Avalon
● Definição da Plataforma Alvo
22
Conceitos e orientações gerais
● Pelas orientações atuais, para se ter alta produtividade e
atender tempo de mercado, um projeto dedicado, para um
certo domínio de aplicações, deve ser um PBP.
● Surge aí o dilema da 1ª geração onde, uma plataforma está
sendo pensada para um conjunto futuro de aplicações às
quais, possam ser consideradas baseadas nesta plataforma.
● Um 1º PBP não se limita a escolher e mapear IPs. Ele inclui
o estudo da arquitetura e dos seus módulos construtivos
onde, o comportamento global, a modelagem e as garantias
de desempenho são críticos e devem ser bem avaliadas.
23
Conceitos e orientações gerais
● A metodologia de PBP propõe uma arquitetura de co-design
específica para um certo domínio de aplicações, que:
● abstraia do projetista seus detalhes construtivos;
● que seja altamente parametrizável;
● que permita elevado grau de personalização;
● e que enfatize o reuso de blocos previamente projetados
e validados, denominados de ip cores (núcleos de
propriedade intelectual).
24
Estratégias de Projetos Baseados em Plataforma
● Dentre as estratégias de PBP destacam-se:
● a baseada em padrões de barramentos, centrada no
meio de comunicação (bus-centric);
● a baseada na interface de comunicação (core-centric) e;
● a baseada na adaptação da interface por uso de
wrappers.
● Estas duas últimas, não dependentes do barramento.
● Optou-se pela 1ª estratégia e os padrões de barramentos
analisados foram o CoreConnect, o AMBA e o Avalon.
Optando-se pelo Avalon.
25
Metodologia de Projeto Baseado em Plataforma
centrada no meio de comunicação Avalon
● O padrão Avalon é uma arquitetura simples, de barramento
único, o Avalon Switch Fabric, de alta performance,
projetado para acomodar processadores da família NIOS e
periféricos on-chip ou externos, em um ambiente SOPC.
● Suas especificações definem transferências de dados entre
componentes mestres e escravos onde, qualquer periférico
mestre pode se conectar a qualquer periférico escravo e a
largura dos dados é feita automaticamente (podendo chegar
até 128 bits).
26
Metodologia de Projeto Baseado em Plataforma
centrada no meio de comunicação Avalon
27
Definição da Plataforma Alvo
TP (tensão AB)
TP (tensão BC)
TP (tensão CA)
Unidade de potência
Tap
(tensão AB)
Tap
(tensão BC)
Interface Unidade de Controle/
Atuadores de Direção e de Mudança
de Tap (tensões AB, BC e CA)
Interface TP/Microcontrolador
Tap
(tensão CA)
Unidade de Controle
Microcontrolador PIC
PIO_E
PIO_S
Avalon Switch Fabric
Futuros núcleos
de IP
Núcleo de Ajuste
de Tensões
CPU NIOS II
(RTOS MicroC OS II)
Memória
Interna
Dispositivos
convencionais
de E/S
Interfaces de E/S
Memória
Externa
Dispositivos
de Memória
Flash Externa
28
Definição das tensões de regulação baseada na
linearização dos parâmetros de sensibilidade
● Análise das tensões de regulação baseada na linearização
dos parâmetros de sensibilidade
● Cálculo dos parâmetros de sensibilidade
● Validação dos parâmetros de sensibilidade
● Algoritmo proposto para ajuste da tensão de regulação com
o uso dos parâmetros de sensibilidade
● Validação do algoritmo de ajuste da tensão de regulação
com o uso dos parâmetros de sensibilidade
● Interface gráfica GUI_DdAjuste
● Módulo digital para simulação e ajuste da tensão de
saída de um regulador monofásico
29
Análise das tensões de regulação baseada na
linearização dos parâmetros de sensibilidade
● A partir de cálculos de fluxos de carga realizados em
alimentadores radiais de distribuição de energia elétrica
reais constatou-se que:
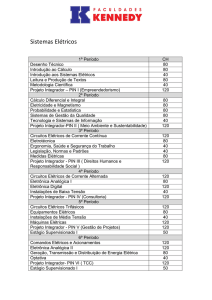
1. para condições fixas de carga, uma variação na tensão de
saída de um regulador se reflete, linearmente, para todos
os nós localizados a jusante. Ou seja
V j
V j
Vi Fc 0
Vi
● Neste caso, a tensão estimada em um nó regulado j, em
decorrência de uma medição de tensão no nó regulador i,
será dada por:
Vj
est
V j
ant
V j
Vi
V
i
med
Vi ant
30
Análise das tensões de regulação baseada na
linearização dos parâmetros de sensibilidade
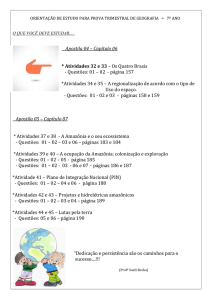
2. para uma condição fixa de tap de um regulador (ΔVit = 0) e
excursões de carregamento no intervalo usual da curva de
carga diária, as tensões nos nós, variam linearmente com a
carga. Ou seja:
e
V
V j
j
Fc
Fc Vit 0
Vi
Vi
Fc
Fc
Vit 0
● Também neste caso, relacionando a tensão estimada em
um nó j, em decorrência de uma medição de tensão no nó
regulador i, se obtém:
V j
V j est V j ant
●
Fc
Vi m ed Vi ant
Vi
Fc
ou seja: V j est V j ant
Vi med Vi ant
Vi
V j
31
Análise das tensões de regulação baseada na
linearização dos parâmetros de sensibilidade
● Constata-se portanto que:
1. com o monitoramento apenas da tensão de saída do
regulador, através da medição da tensão fornecida pelo TP,
será possível estimar a tensão em qualquer nó a jusante;
2. a estimativa da tensão em um nó remoto pode ser obtida
levando-se em conta apenas o parâmetro de sensibilidade
que relaciona as tensões no nó remoto e no nó regulador;
3. é dispensável a presença de qualquer circuito compensador
de queda de linha.
32
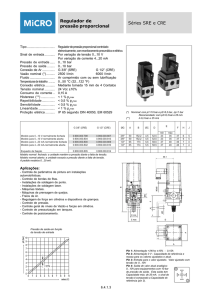
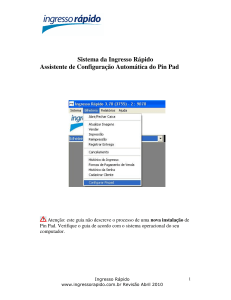
Tensão no nó (pu)
Análise das tensões de regulação baseada na
linearização dos parâmetros de sensibilidade
1,1
1,05
1
Nó 4
Nó 8
Nó 14
Nó 18
Nó 21
0,95
0,9
0,85
1,01
1,03
1,05
1,07
Tensão na saída do regulador (pu)
33
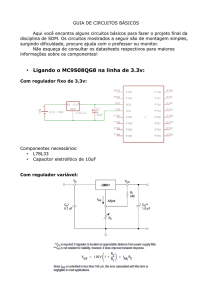
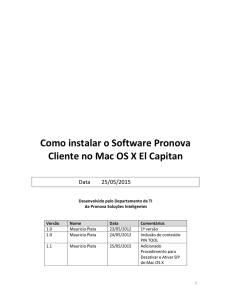
Tensao (pu)
Análise das tensões de regulação baseada na
linearização dos parâmetros de sensibilidade
1
0,95
0,9
Nó 21
Nó 11
Nó 7
Nó 34
0,85
0,8
0,75
0,7
0.5
0.75
1.0
1.25
1.5
Carregamento
34
Cálculo dos parâmetros de sensibilidade
● A derivada parcial da tensão em um nó j, em relação à
tensão em outro nó i, situado à montante, foi calculada
isolando-se a tensão Vj na equação biquadrada
R 2 X 2 P 2 Q 2 2 R P X Q
J SJ
SJ
J
SJ
J
J SJ
- V 2 V 2 V 4 0
i
J
J
● e derivando-a em relação a Vi
1
2
1 B B 2 4 AC
2
2A
Vi
V j
B
Vi
1
1 2
B 4 AC 2 2 B B 4 C
2
V
Vi
i
2A
● onde:
A1
B 2 R j Ps j X j Qs j Vi 2
C R 2j X 2j Ps 2j Qs 2j
35
Cálculo dos parâmetros de sensibilidade
● A derivada parcial da tensão em um nó j, em relação ao
fator de carregamento foi calculada, a partir das equações
Psk
linhas
nos
i 1
i 1
Peri Fc Pi
Qs k
linhas
nos
i 1
i 1
Qeri Fc Qi
● representativas das potências-somas nos nós,
● derivando-as em relação a Fc
Psk linhas Peri nos
Pi
Fc
i 1 Fc
i 1
Qs k linhas Qeri nos
Qi
Fc
i 1 Fc
i 1
● obtendo-se:
1
2
1 B B 2 4AC
2
2A
Fc
V j
B
Fc
1
1 2
B 4AC 2 2B B 4 C
2
F
Fc
c
2A
36
Validação dos parâmetros de sensibilidade
● Para validar o uso dos parâmetros de sensibilidade, na
definição do novo perfil de tensão de um alimentador, em
resposta a uma variação de tensão ou de carregamento,
foram feitas algumas análises em alimentadores reais:
● Num primeiro exemplo de análise, foram levantados os
perfis de tensão após uma elevação de tensão.
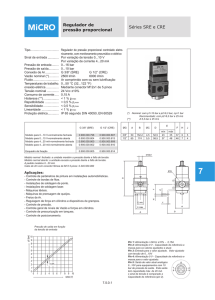
● Num segundo exemplo de análise, foram levantados os
perfis de tensão, depois de determinados aumentos de
carga.
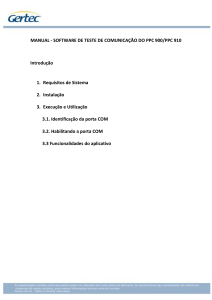
37
Validação dos parâmetros de sensibilidade
1,01
0,99
0,97
Tensão (pu)
0,95
calc
est
0,93
0,91
0,89
0,87
0,85
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
35
37
39
41
43
45
47
49
51
Nó
O erro máximo foi de 0,7% para uma elevação aproximada de 15%
38
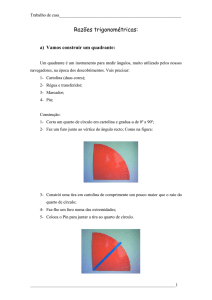
Validação dos parâmetros de sensibilidade
1,05
1
0,95
0,9
0,85
Real 1,5
Est 1,5
0,8
0,75
0,7
0,65
0,6
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
O erro máximo foi de 3,0% para um aumento do carga de 50,0%
39
Algoritmo para ajuste da tensão de regulação com
o uso dos parâmetros de sensibilidade
1. Monitorizar a tensão de saída do regulador até perceber uma
variação de tensão superior a um degrau de tensão;
2. Estimar a tensão de saída do regulador para que a condição
anterior à variação seja obtida;
3. Estimar os degraus, relativos a posição atual do tap, a elevar ou
rebaixar;
4. Analisar o impacto de uma mudança de tap no perfil de tensão
do alimentador;
5. Enviar comando para uma mudança de tap, caso nenhuma
restrição tenha sido violada;
6. Redefinir o perfil de tensão da rede;
7. Voltar a executar o procedimento 1.
40
Validação do algoritmo de ajuste da tensão de
regulação com o uso dos parâmetros de sensibilidade
● Para validar o algoritmo de ajuste da tensão de regulação,
com os parâmetros de sensibilidade, foram implementados:
● uma interface gráfica, projetada no ambiente do MatLab
com o nome de GUI_FdAjuste
● um módulo digital, no ambiente de desenvolvimento
Simulink MatLab, com o DSP Builder, que permite ajustar
a tensão de saída de um regulador e simular o seu
comportamento em tempo de operação.
41
Interface gráfica GUI_FdAjuste
42
Interface gráfica GUI_FdAjuste
43
Diagrama de blocos do módulo digital para simulação e
ajuste da tensão de saída de um regulador monofásico
lutRAMp
Restrições
lutRAMc
UAT
(Unidade
de Ajuste
de tensão)
Condições
iniciais
InLoad
MdE
Reset
Tensão
medida
ADC
Sampler
UCT
(Unidade
de Controle
de Tap)
Sinais de
posicionamento
do tap
44
Implementação do módulo digital para simulação e ajuste
da tensão de saída de um regulador monofásico
45
Implementação do módulo digital para simulação e ajuste
da tensão de saída de um regulador monofásico
46
Implementação do módulo digital para simulação e ajuste
da tensão de saída de um regulador monofásico
47
Implementação do módulo digital para simulação e ajuste
da tensão de saída de um regulador monofásico
48
Implementação do módulo digital para simulação e ajuste
da tensão de saída de um regulador monofásico
Start = 0
Stop = 0
Stop = 1
s1
InLoad = 1
s2
s3
Start = 1
s4
s5
s6
s7
InLoad = 0
49
Avaliação dos efeitos causados por variações de
tensões impostas nas saídas dos reguladores.
● Em um banco regulador trifásico, em configuração Estrela
Aterrada a amostra da tensão é sobre uma tensão de fase e
a atuação do regulador é sobre uma tensão de fase.
● Em bancos reguladores em Delta ou em Delta Aberto, o
mesmo não acontece, a amostra da tensão é sobre uma
tensão de linha, e a atuação é sobre uma tensão de fase.
50
Banco regulador trifásico em configuração Estrela
Aterrada.
VA1
nAVA2
Z
VA2
IA1
IA2
VB1
Controle
nBVB2
TP
VC2
VB2
nCVC2
VC1
Obs: para simplificar a figura, o controle é
mostrado em apenas uma das derivações.
51
Bancos reguladores trifásicos em configurações
Delta e Delta Aberto.
VA1
nAVAB2
Z
VA2
IA1
Delta
IA2
VB1
VC2
nBVBC2
Controle
VA2
TP
Z
IA2
Z
VB1
nAVAB2
VC1
Obs: para simplificar as figuras,
os controles são mostrados em
apenas uma das derivações.
VB2
Z
nCVCA2
VB2
Delta Aberto
VA1
IA1
Controle
TP
VC1
nCVBC2
VC2
52
Avaliação dos efeitos causados por variações de
tensões impostas nas saídas dos reguladores.
● Como reflexo desta 2ª constatação, foi feito um estudo do
comportamento apresentado por um alimentador real
quando submetido a ações de um banco regulador trifásico.
● Como condições de operação se considerou o alimentador:
● com uma carga ativa de 50% de potência constante e 50% de
impedância constante;
● com uma carga reativa de 100% de impedância constante;
● e sendo regulado por um banco regulador trifásico em
configuração Delta.
● Nas análises foram realizados cálculos exatos de fluxo de
carga considerando diferentes modalidades de atuação do
banco regulador.
53
Modalidades de atuação do banco regulador
1. Caso base, com tap 0, para o alimentador equilibrado, com:
carregamento nominal; 50% do carregamento nominal; e 150% do
carregamento nominal.
2. Atuação de um degrau de tensão nos três reguladores para as
mesmas situações colocadas em 1.
3. Atuação de um degrau de tensão em apenas um regulador para as
mesmas situações colocadas em 1.
4. Atuação em tap livre, em apenas um regulador para as mesmas
situações colocadas em 1.
5. Caso base, tap 0, para o alimentador desequilibrado, com:
carregamento nominal, 50% do carregamento nominal; e 150% do
carregamento nominal.
6. Atuação em tap livre, em apenas 1 regulador para as mesmas
situações colocadas em 5.
54
Avaliação dos efeitos causados por variações de
tensões impostas nas saídas dos reguladores.
● Alguns resultados obtidos para o nó 10, onde existe um
transformador trifásico para fornecimento de energia em
baixa tensão, podem ser vistos nas tabelas
● 1 (para 50% do carregamento nominal);
● 2 (para carregamento nominal) e;
● 3 (para 150% do carregamento nominal).
55
Tabela 1.
Análise no nó 10
Carregamento 50% do nominal
Tensões de linha do alimentador
(kV)
Ref
Fases AB
Fases BC
Tensões no secundário de baixa
(V)
Fases CA
Fase A
Fase B
Fase C
Desequilíbrio entre fases
B-A
C-B
A-C
1
12,7922
12,8662
12,824
203,3715
204,5475
203,8768
1,176
-0,6707
-0,5053
2
12,9106
12,9854
12,9422
205,2544
206,4421
205,7559
1,1877
-0,6862
-0,5015
3
12,8704
12,8686
12,8618
204,615
204,5854
204,4779
-0,0296
-0,1075
0,1371
4
13,2229
12,879
13,0365
210,2186
204,7526
207,2543
-5,466
2,5017
2,9643
5
12,4853
13,0474
12,991
198,4953
207,4262
206,531
8,9309
-0,8952
-8,0357
6
12,9919
13,064
13,2268
206,5479
207,6932
210,2784
1,1453
2,5852
-3,7305
7
0
0
0
0
0
0
8
0,0092556
0,0092646
0,0092171
0,0092584
0,0092624
0,0092168
9
0,0061131
0,0001865
0,0029476
0,0061144
0,0001853
0,0029483
10
0,0336690
0,0009949
0,0165705
0,0336679
0,0010027
0,0165664
11
0
0
0
0
0
0
12
0,040576
0,001272
0,018151
0,040568
0,001287
0,018144
56
Tabela 2.
Análise no nó 10
Carregamento nominal
Tensões de linha do alimentador
(kV)
Ref
Fases AB
Fases BC
Tensões no secundário de baixa
(V)
Fases CA
Desequilíbrio entre fases
Fase A
Fase B
Fase C
B-A
C-B
A-C
1
10,5737
10,7715
10,6338
182,8011
185,0892
183,5046
2,2881
-1,5846
-0,7035
2
10,6826
10,8811
10,7416
184,5056
186,81
185,1964
2,3044
-1,6136
-0,6908
3
10,6434
10,7794
10,6647
183,9128
185,1778
184,0044
1,265
-1,1734
-0,0916
4
11,6136
10,8797
11,1211
199,4204
186,3135
191,3888
-13,1069
5,0753
8,0316
5
9,7135
11,1877
11,1652
172,7983
190,1915
189,2706
17,3932
-0,9209
-16,4723
6
10,9563
11,3309
11,6226
192,4214
191,797
197,1487
-0,6244
5,3517
-4,7273
7
0
0
0
0
0
0
8
0,010299
0,010175
0,010137
0,009324
0,009297
0,009219
9
0,006592
0,000733
0,002906
0,006081
0,000479
0,002724
10
0,098348
0,010045
0,045826
0,090915
0,006615
0,042965
11
0
0
0
0
0
0
12
0,127946
0,0128
0,040967
0,113561
0,008441
0,041623
57
Tabela 3.
Análise no nó 10
Carregamento 150% do nominal
Tensões de linha do alimentador
(kV)
Ref
Fases AB
Fases BC
Tensões no secundário de baixa
(V)
Fases CA
Desequilíbrio entre fases
Fase A
Fase B
Fase C
B-A
C-B
A-C
1
9,9369
10,1577
9,9993
157,9783
161,4897
158,9759
3,5114
-2,5138
-0,9976
2
10,0305
10,252
10,0918
159,4629
162,9856
160,4414
3,5227
-2,5442
-0,9785
3
9,9939
10,169
10,0241
158,8838
161,6681
159,3686
2,7843
-2,2995
-0,4848
4
11,8088
10,4707
10,8683
187,7352
166,4622
172,7866
-21,273
6,3244
14,9486
5
8,6263
10,5688
10,6444
137,1461
168,0303
169,2157
30,8842
1,1854
-32,0696
6
10,4662
10,8538
11,1126
166,3984
172,5602
176,6608
6,1618
4,1006
-10,2624
7
0
0
0
0
0
0
8
0,0094194
0,0092836
0,0092507
0,0093975
0,0092631
0,0092184
9
0,0057362
0,0011125
0,0024802
0,0057318
0,0011047
0,0024702
10
0,1883787
0,0308141
0,0869061
0,0532991
0,0685524
0,1112426
11
0
0
0
0
0
0
12
0,2132896
0,0269662
0,0439856
0,213293
0,0269588
0,0439977
58
Avaliação dos efeitos causados por variações de
tensões impostas nas saídas dos reguladores.
● O que de mais importante se observou foi que:
1. ao ser constatada a necessidade de mudança de tap em 1
regulador, caso se atue igualmente em todos os reguladores do
banco, as condições diferenciais ou relativas das tensões de
linha e das tensões de fase atuais se mantêm.
Ou seja, se o sistema está equilibrado ele se manterá
equilibrado, se estiver desequilibrado, ele se manterá
igualmente desequilibrado.
Percentualmente, não existem alterações significativas nas
condições de operação (como se pôde ver na linha Ref 9).
59
Avaliação dos efeitos causados por variações de
tensões impostas nas saídas dos reguladores.
● O que de mais importante se observou foi que:
2. ao ser constatada a necessidade de mudança de tap em 1
regulador, caso se atue apenas nele as condições diferenciais
ou relativas das tensões de linha e das tensões de fase atuais
de operação do sistema, são imprevisíveis.
Pode-se ou não melhorar as condições de equilíbrio e de
diferenças entre fases embora, na maioria das vezes, existam
maiores tendências de melhora.
60
Estratégia para atuação no ajuste das tensões de
saídas dos reguladores.
● Proposição:
estando operando em tempo real, se obtêm os
melhores resultados se a atuação no banco regulador
for regida numa visão de otimização do nível de tensão
e do melhor equilíbrio de tensão entre as fases
61
Implementação e teste da plataforma alvo
● Projeto do núcleo de ajuste das tensões de saída de um
banco regulador trifásico
● Incorporação do núcleo de ajuste de tensão no SOPC Builder
● Projeto e desenvolvimento da unidade complementar de
controle
● Compilação, síntese e análise da unidade complementar de
controle
● Programações usadas para teste da unidade de controle
● Programação do C PIC
● Programação da CPU NIOS II
62
Projeto do núcleo de ajuste das tensões de saída
de um banco regulador trifásico
q[2].[30]
Start1
full
1
rreq
Vi[2].[30]
FIFO
VjDej[2].[30]
empty
wreq
usdw(2:0)
7
FIFO
[2].[30]
aPerfil
WRITE
4:0
write
[2].[30]
aCjVab
Write Data
[2].[30]
4:0
[2].[30]
DataIn
aPerfil1
4:0
[2].[30]
aCjVab1
4:0
[2].[30]
aPerfil2
4:0
[2].[30]
aCjVab2
sel[2:0]
0
1
MUX
2
3
4
vNohj
ViEsp[2].[30]
Nohj[6:0]
aPerf ilIn[2].[30]
aCjVabIn[2].[30]
v Cont[6:0]
23
nNohs[6:0]
vnNohs
Read Data
[2].[30]
DataOut
d[2].[30]q[2].[30]
full
rreq FIFO
empty
wreq usdw(2:0)
f In
HDL SubSystem_In
READ
read
FIFO1
n-to-1 Multiplexer
0
BusConcatenation1
vnNohs2
a[29:0]
ab[31:0]b[1:0]
ab[1:0]
4:0
Address
Nohi[6:0]
vNohi
10
sel[2:0]
0
1
MUX
2
3
4
BusConcatenation
a[0]
b[0]
Address
n-to-1 Multiplexer1
ViEspf [2].[30]PosTap[4:0]
AND
d[2].[30]
ands
S5_2
ViMed[2].[30]
reset
1
Chav1
s1
s2
Start
s3
s4
InLoad s5
S6
stop
S7
S6_2
pTap
ViIn[2].[30]
S7_2
iTap
S3_2
S1_2
MdEcaPerfil
1
0
vnNohs1
SignalTap II Analysis
SignalCompiler
Altera Cyclone II EP2C35 DSP Development Board
configuration
ViAt[2].[30]
Chav2
sel[0:0]
stop
HDL SubSystem_tap
0 MUX
1
MuxMed
63
Projeto do núcleo de ajuste das tensões de saída
de um banco regulador trifásico
64
Projeto do núcleo de ajuste das tensões de saída
de um banco regulador trifásico
65
Projeto e desenvolvimento da unidade
complementar de controle
Componente convencional
Microcontrolador PIC
Componentes em FPGA
PIO_S
PIO_E
Avalon Switch Fabric
Futuros núcleos
de IP
Núcleo de Ajuste
de Tensões (NAT)
CPU NIOS II
(RTOS MicroC OS II)
Memória
Interna
Interfaces de E/S
66
Unidade complementar de controle construída no
SOPC Builder
67
Compilação, síntese e análise da unidade
complementar de controle
68
Compilação, síntese e análise da unidade
complementar de controle
69
Esquemático da Unidade Complementar de
Controle
connector_pll
PLD_CLOCKINPUT[1]
inclk0
INPUT
VCC
inclk0 f requency : 50.000 MHz
Operation Mode: Normal
Option Value
Location PIN_K5
c0 sysclk
e0
OUTPUT
PLD_CLKOUT
Option Value
Location PIN_L8
Clk Ratio Ph (dg) Td (ns) DC (%)
c0
1/1
0.00
0.00
50.00
e0
1/1
0.00
0.00
50.00
inst2
Cy clone
delay_reset_block
PLD_CLEAR_N
clock_in
reset_n
INPUT
VCC
Option Value
Location PIN_C4
delayed_reset_n
std_1c20
clk
reset_n
inst3
USER_PB[3..0]
Option
Location
Location
Location
Location
INPUT
VCC
in_port_to_the_button_pio[3..0]
Value
PIN_W3
PIN_Y4
PIN_V4
PIN_W4
be_n_to_the_ext_ram[3..0]
ext_ram_bus_address[22..0]
ext_ram_bus_data[31..0]
ext_ram_bus_readn
read_n_to_the_ext_ram
select_n_to_the_ext_flash
select_n_to_the_ext_ram
w rite_n_to_the_ext_flash
w rite_n_to_the_ext_ram
LCD_E_from_the_lcd_display
LCD_RS_from_the_lcd_display
LCD_RW_from_the_lcd_display
LCD_data_to_and_from_the_lcd_display[7..0]
out_port_from_the_led_pio[7..0]
bidir_port_to_and_from_the_reconfig_request_pio
RXD[1]
Option Value
Location PIN_K16
INPUT
VCC
rxd_to_the_uart1
inst
OUTPUT
SRAM_BE_N[3..0]
OUTPUT
FSE_A[22..0]
BIDIR
VCC
OUTPUT
FSE_D[31..0]
OUTPUT
OUTPUT
OUTPUT
OUTPUT
OUTPUT
OUTPUT
OUTPUT
OUTPUT
BIDIR
VCC
OUTPUT
BIDIR
VCC
out_port_from_the_seven_seg_pio[15..0]
OUTPUT
txd_from_the_uart1
OUTPUT
Option
Location
Option
Location
Option
Location
SRAM_OE_N
Location
Option
Location
Location
FLASH_CS_N
Option
Location
SRAM_CS_N
Location
Option
Location
FLASH_RW_N
Location
Option
Location
SRAM_WE_N
Location
Option
Location
Location
Option
Location
LCD_E
Location
LCD_RS
Location
Option
Location
LCD_RW
Option
Location
LCD[7..0]
Location
Option
Location
Location
Option
Location
LEDG[7..0]
Location
Location
Location
Location
Option
Location
PLD_RECONFIGREQ_N
Location
Location
Location
Option
Location
Location
Display _7_Segment[15..0]
Location
Location
Location
Option
Location
Location
TXD[1]
Location
Location
Location
Option
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
Location
FLASH_OE_N
Value
PIN_V17
Value
PIN_V16
PIN_B4
Value
PIN_W16
PIN_E4
PIN_C6
Value
PIN_T16
PIN_E5
PIN_F8
PIN_B12
Value
PIN_F3
PIN_E8
PIN_Y17
Value
PIN_E3
PIN_B8
PIN_A12
Value
PIN_E2
PIN_A8
PIN_W17
Value
PIN_F4
PIN_D8
PIN_D12
PIN_F5
Value
PIN_C8
PIN_F2
PIN_U16
PIN_B9
PIN_F1
PIN_A9
Value
PIN_F6
PIN_D9
PIN_J20
Value
PIN_A4
PIN_C9
PIN_J15
Value
PIN_G5
PIN_E6
PIN_J19
Value
PIN_G1
PIN_E9
PIN_H14
PIN_G2
PIN_E10
PIN_J14
PIN_D5
Value
PIN_B10
PIN_J17
PIN_E14
PIN_D6
PIN_A10
PIN_J18
PIN_E13
PIN_C5
PIN_F10
Value
PIN_K15
PIN_C14
PIN_B5
PIN_C10
PIN_V8
PIN_W18
PIN_D14
PIN_C2
PIN_D10
Value
PIN_V18
PIN_E12
PIN_D2
PIN_C11
PIN_V7
PIN_V19
PIN_F12
PIN_D4
PIN_D11
PIN_T6
Value
PIN_B3
PIN_D1
PIN_B11
PIN_W5
PIN_M14
PIN_B14
PIN_B6
PIN_V5
PIN_A11
PIN_U5
PIN_E11
PIN_T5
PIN_A6
PIN_Y6
PIN_F7
PIN_T8
PIN_E7
PIN_R7
PIN_B7
PIN_Y7
PIN_A7
PIN_W7
PIN_D7
PIN_V6
PIN_C7
PIN_U6
PIN_U7
PIN_W6
PIN_T7
70
Circuito RTL, da Unidade Complementar de
Controle, gerado pelo RTL Viewer
std_1c20:inst
LCD_E_from_the_lcd_display
LCD_RS
LCD_RW_from_the_lcd_display
LCD_RW
bidir_port_to_and_from_the_reconfig_request_pio
ext_ram_bus_readn
connector_pll:inst2
read_n_to_the_ext_ram
PLD_CLOCKINPUT[1..1]
c0
clk
e0
reset_n
inclk0
SRAM_CS_N
in_port_to_the_button_pio[3..0]
write_n_to_the_ext_ram
be_n_to_the_ext_ram[3..0]
TXD[1..1]
FLASH_RW_N
SRAM_WE_N
SRAM_BE_N[3..0]
ext_ram_bus_address[22..0]
FSE_A[22..0]
ext_ram_bus_data[31..0]
FSE_D[31..0]
delayed_reset_n
PLD_CLEAR_N
SRAM_OE_N
FLASH_CS_N
txd_from_the_uart1
reset_n
FLASH_OE_N
select_n_to_the_ext_ram
write_n_to_the_ext_flash
clock_in
PLD_RECONFIGREQ_N
select_n_to_the_ext_flash
rxd_to_the_uart1
delay _reset_block:inst3
LCD_E
LCD_RS_from_the_lcd_display
LCD_data_to_and_from_the_lcd_display[7..0]
out_port_from_the_led_pio[7..0]
out_port_from_the_seven_seg_pio[15..0]
LCD[7..0]
LEDG[7..0]
Display _7_Segment[15..0]
USER_PB[3..0]
RXD[1..1]
PLD_CLKFB
sdram_pll:inst1
inclk0
e0
SDRAM_CLK
PLD_CLKOUT
71
Programações usadas para teste da unidade de
controle
● Optou-se por uma estratégia de programação com divisão
de tarefas entre o C PIC e a CPU NIOS II.
● No C PIC foram executadas as tarefas de:
● amostra dos sinais analógicos de tensão presentes na saída
da interface TP/MicrocontroladorPIC;
● conversão destes sinais analógicos em sinais digitais;
● cálculo do somatório do quadrado das tensões instantâneas
amostradas durante cada meio-ciclo;
● colocação dos valores calculados à disposição da unidade
complementar de controle e de gerar um pedido de
interrupção a CPU NIOS II após cada finalização de cálculo.
72
Programação do microcontrolador PIC.
1,5
Tensão vAB
1
vmax
Tensão vCA
Tensão vBC
0,5
T7
0
T1
T2
T3
T4
T5
T6
-0,5
-1
-1,5
Para cada meio-ciclo são feitas 122 amostras.
Na conversão A/D de 10 bits considerou-se que:
• uma tensão de 5 V equivaleria a uma excursão máxima da tensão de
linha de 537,4 V (valor de pico de um sinal de tensão de 380 Vrms)
• 5 V equivaleriam a um valor digital igual a 1.023 (11 1111 11112).
73
Programação do microcontrolador PIC.
● O cálculo deste somatório:
● viabiliza que a comunicação do C PIC com o NIOS II só
venha a ocorrer a cada 11,11 ms e que o tempo de execução
de qualquer programa crítico no NIOS II possa ser de até
33,33 ms, que é o tempo de 3 conjuntos de amostras;
● simplifica o cálculo do valor rms, a ser feita pelo NIOS, dado
por:
T2
Vrms
1
v 2 (t )dt
T 2 T1
T1
● ou, tratando-se de sinais digitalizados, dado por Vrms
onde, N é o número de amostras na janela de
cálculo e vi é a tensão amostrada no instante i.
1
N
N
vi 2
i 1
74
Formatação da palavra enviada pelo Microcontrolador PIC.
Pino
Pinos
Pinos
RA2
RA5 e RA4
RE2 a RE0
Sinal 01 = vAB
Int
10 = vCA
Pinos RD7 a RD0
Pinos RC7 a RC0
Pinos RB7 a RB0
27 bits para armazenamento do somatório das tensões amostradas
em cada meio ciclo
11 = vBC
75
Programação da CPU NIOS II
● O programa escrito para o NIOS II teve como objetivos:
● criar as tarefas de tempo real, definindo pilhas,
prioridades e semáforos necessários as operações de
tempo real;
● declarar as variáveis de dados requisitadas pelo módulo
de ajuste de tensão ou pelo hardware de acesso ao kit
de desenvolvimento utilizado (Cyclone Edition da Altera);
● permitir acompanhar a execução do programa residente
no FPGA através do microcomputador, via interface
JTAG;
76
Programação da CPU NIOS II
● O programa escrito para o NIOS II teve como objetivos:
● reconhecer pedidos de interrupção na borda de subida
de sinais gerados a partir do kit de desenvolvimento;
● implementar o algoritmo de ajuste das tensões de saída
de um banco regulador trifásico, controlando a
passagem de semáforos entre as tarefas de tempo real;
● enviar comandos de simulação de ajuste de taps.
● atualizar variáveis representativas dos novos perfis de
tensão.
77
Algoritmo para teste da Unidade Complementar
de Controle:
1. aguarda até que ocorra pedido de interrupção de hardware;
2. lê somatório das tensões amostradas (vAB, vCA ou vBC);
3. complementa o cálculo do seu valor eficaz.
4. se as condições de tensões estiverem fora da faixa de regulação
ótima, executa o procedimento 5, se não volta ao procedimento 1.
5. inicia contagem do tempo de retardo;
6. aguarda novos pedidos de interrupção;
7. busca novos valores das amostras das tensões;
8. complementa o cálculo dos seus valores eficazes.
78
Algoritmo para teste da Unidade Complementar de
Controle
9. se as tensões voltarem a faixa de regulação ótima, encerra o
tempo de retardo, encerra o processo de ajuste e volta a 1.
Caso contrário, enquanto não termina o tempo de retardo, volta
a 6. Após o tempo de retardo, vai para 10;
10. estima quantos degraus devem ser elevados ou rebaixados;
11. simula, para as mudanças de taps, novos perfis de tensão,
verificando, no ponto de regulação, quais as posições de taps
que garantem tensões dentro da faixa e melhores condições de
equilíbrio entre as tensões de fase.
12. envia, com base nas simulações feitas em 11, comandos para
mudanças de taps. Aguarda 2 s. Durante este tempo recalcula e
armazena o novo perfil de tensão do alimentador. Após os 2 s,
volta a 6;
79
Conclusão
● Resultados e produtos obtidos
● Ressalvas
● Trabalhos futuros
80
Resultados e produtos obtidos
● Comprovação da eficácia do ajuste das tensões de
regulação em um alimentador, com base na linearização
dos parâmetros de sensibilidade;
● Controle, em tempo real, da tensão em um nó qualquer de
um alimentador a partir da amostra da tensão de saída do
regulador e dos parâmetros de sensibilidade que definem
as derivadas parciais da tensão de cada nó a jusante, em
relação à tensão de saída do regulador.
● Correção, em tempo real, de desequilíbrios de tensão no
ponto de regulação.
81
Resultados e produtos obtidos
● Desenvolvimento de uma interface gráfica no ambiente de
programação do MatLab, para simulações das tensões de
regulação e do perfil de tensão de alimentadores;
● Implementação de um módulo digital, no ambiente de
desenvolvimento Simulink/MatLab com o DSP Builder, para
simulação do comportamento dinâmico de reguladores de
tensão monofásicos;
● Eliminação do bloco LDC, possibilitando a redução dos
custos de construção, de operação e de manutenção dos
reguladores de tensão;
82
Resultados e produtos obtidos
● eliminação de custos e eventuais transtornos com
deslocamentos de pessoal;
● redução nos indesejáveis desligamentos da rede e
freqüentes operações periculosas;
● Desenvolvimento e implementação de uma plataforma de
embarque para reguladores de tensão;
● Implementação de um núcleo embarcado para ajuste das
tensões de saída de bancos reguladores trifásicos;
● Incorporação de saídas de transferência de dados padrões
e de cartão de memória flash.
83
Ressalvas
● A falta de uma bancada de testes com reguladores impediu
fazer algumas avaliações que pudessem apontar
conclusivamente para a sua aplicabilidade prática e de
implementação em escala industrial;
● A plataforma foi desenvolvida pensando-se exclusivamente
no seu embarque em reguladores, no entanto, ela é
adaptável a qualquer equipamento de potência que possua
ou que permita a inclusão de transformadores de potencial;
84
Ressalvas
● Embora não tenha sido possível acessar dados da memória
flash externa, a inclusão de um cartão compact flash
permitirá que se atualize, com uma simples troca de cartão,
por exemplo, as características de um alimentador;
● Embora a concepção do Núcleo de Ajuste de Tensão tenha
sido pensada para que, no final do trabalho, ele fosse
disponibilizado como um núcleo de propriedade intelectual,
entende-se, que a sua descrição, validação e normalização
ainda não sejam suficientes para caracterizá-lo como um IP;
85
Ressalvas
● Nos ajustes de tensão foram utilizados tempos de espera
iguais aos utilizados pelas concessionárias de energia
elétrica, mantendo a atuação do regulador ainda muito lenta.
● A comparação do tempo de espera, que é de 30 s, com o
tempo máximo de execução do algoritmo de ajuste, que é de
33,33 ms, aponta para a necessidade de uma revisão na
política de operação do regulador;
● Recursos adicionados à plataforma, como o RTOS e o NIOS
II, parecem estar além dos objetivos requeridos pela
aplicação mas, suas presenças são plenamente justificadas,
quando avaliadas na perspectiva da pesquisa científica.
86
Trabalhos futuros
● Substituição do algoritmo de ajuste com parâmetros de
sensibilidade por um programa de cálculo de fluxo de carga;
● Embarque de rotinas de programas ou núcleos dedicados,
especificamente projetados para monitorizar grandezas
relativas à operação do equipamento, indispensáveis a uma
avaliação da sua vida útil;
● Desenvolvimento de novos núcleos funcionais para a
plataforma, tais como transmissores e receptores de dados
e/ou IP GPS.
87
Trabalhos futuros
● Implementação de uma bancada de testes que permita se
avaliar, na prática, o comportamento de bancos reguladores
trifásicos, após ajustes de tensão e de carregamento;
● Implementação de um sistema, com comunicação com o
TOpReDE, que permita simular, no ambiente Matlab/
Simulink, o comportamento de bancos reguladores trifásicos,
usando, segundo a topologia, 2 ou 3 módulos de ajuste.
88
Publicações
● MEDEIROS JÚNIOR, M. F. de et al. Análise tecno-econômica
da correção do perfil de tensão de alimentadores de média
tensão. In: II CITENEL. 2003. Salvador.
● OLIVEIRA, J. A. N. de et al. IP core for regulation voltage
adjustment in electric energy distribution systems. In: IPSOC 2005. Grenoble.
● OLIVEIRA, J. A. N. de et al. Embedded platform and Ip Core
for adjustment off regulation voltage in electric energy
distribution systems. In: VII INDUSCON. 2006, Recife.
● OLIVEIRA, J. A. N. de et al. A system to simulate the behavior
of distribution system voltage regulators with embedded
software IP control. In: IEEE PES. Caracas: 2006.
89
Publicações
● PIMENTEL FILHO, M. C. et al. Linearização dos parâmetros de
sensibilidade tensão X tensão e tensão X carregamento para
regulação remota em alimentadores de média tensão. In: VII
INDUSCON. Recife. 2006.
● PIMENTEL FILHO, M. C. et al. Three-phase models of voltage
regulators for the power summation load flow. In: VI
INDUSCON. Joinville. 2004.
● RAMOS, K. D. N. et al. Projeto baseado em reuso:
implementação de um IP de processador didático em FPGA
com interface OCP. In: X IBERCHIP. Cartagena de Indias,
Colombia. 2004.
90
? ... !
91
Dedico este trabalho:
● a minha esposa Célia, uma grande mulher e uma companheira
maravilhosa;
● ao meu pai Nicolau, in Memoriam, um homem
extraordinariamente bom;
● a minha mãe Maria, uma mulher de fibra;
● ao meu irmão Ivo, por alguns anos, um segundo pai;
● a minha irmã Socorro, uma pilastra nos momentos mais difíceis;
● a minha irmã Vanda, sempre uma grande amiga e;
● com muito carinho, aos meus filhos Leonardo, Leandro e Mariana
na esperança de que lhes possa servir de exemplo e incentivo
futuro.
92
Agradecimentos
● A Deus, por me proporcionar tantos momentos, como este,
de regozijo, esperança e felicidade.
● Aos meus familiares, com um pedido de perdão pelos
momentos em que estive ausente. Sem eles eu não
realizaria este sonho.
● Ao professor, parceiro e amigo Manoel Firmino por este tema
de tese maravilhoso, pelas orientações precisas e pela
oportunidade dada de compartilhar de sua integridade e de
sua competência profissional.
● Ao professor e amigo Ivan Saraiva, por todo apoio e ajuda
prestada.
93
Agradecimentos
● Ao amigo Marcos Dias, pelo apoio e pelos inestimáveis
esclarecimentos.
● Ao meu amigo e colega Max Chianca, cuja ajuda permitiu
que muitas barreiras fossem ultrapassadas.
● Aos amigos professores do DEE e do DCA pela motivação e
pelo carinho demonstrado em toda esta minha trajetória. Em
particular, agradeço aos amigos das muitas sextas-feiras,
aos quais, dou um grande e afetuoso abraço.
● In Memoriam, a Bimbo, amigo, colega e incentivador de
todas as horas.
94
Agradecimentos
● Aos funcionários do DEE, do DCA e do PPgEE pelo apoio
recebido.
● Aos alunos do curso de graduação e de pós-graduação em
Eng. Elétrica e, em particular, aos da base, pela ajuda
recebida e pelo amigável convívio e exercício acadêmico.
● A Soraya, secretaria da base de pesquisa pelas traduções
realizadas.
● Aos funcionários da Biblioteca Central e a professora Rildeci
Medeiros pelas orientações e disponibilidade na
normalização deste texto.
● Enfim, a todos que, direta ou indiretamente, contribuíram
com a realização deste trabalho.
95