Hugo Feitosa
Yuri Lacerda
Introdução
Projeto
Protótipo
Avaliação
Trabalhos Futuros
Conclusões
Avanço da tecnologia:
◦
◦
◦
◦
Câmeras Digitais
Câmeras com GPS
Telefones celulares com câmera integrada
Baixo custo de armazenamento
Grande quantidade de fotografias digitais
Dificuldade para organizar e recuperar fotos
Metadados (Exif)
◦
◦
◦
◦
◦
Data/Hora
Localização (Latitude, Longitude)
Modelo da Câmera
Marca
Entre outros
Recordação
◦ Lugares
◦ Eventos
Exemplo:
◦
◦
◦
◦
Casamento
Aniversário
Viagem
Etc.
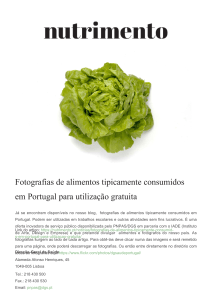
Câmera I
e1
Lt1, Lg1
e2
Lt2, Lg2
e3
Lt3, Lg3
e4
Lt4, Lg4
e5
Lt5, Lg5
tempo
E(n) – Evento n
Lt(n) – latitude n
Lg(n) – longitude n
Organizar a coleção de fotografias de um
determinado usuário em eventos
automaticamente
A partir de informações espaciais e temporais
dos metadados das imagens utilizar um
algoritmo de agrupamento e um de
segmentação para detectar os eventos
Agrupar fotografias de acordo com a posição
geográfica
Algoritmos analisados:
◦ K-means
◦ DBSCAN
Algoritmo
Selecione K pontos como os centróides iniciais;
repeat
Forme K clusters adicionando todos os pontos
ao do centróide mais próximo;
Recalcule o centróide de cada cluster;
until Os centróides não mudaram;
Desvantagem
◦ Deve ser informado a quantidade de grupos a
serem criados;
Algoritmo de agrupamento baseado em
densidade
Vantagens
◦ Os parâmetros de entrada são fáceis de serem
estimados
epsilon: 1Km
Número mínimo de elementos em um grupo: 1
Desvantagem
◦ Epsilon não é variável
Separa os grupos espaciais em eventos
baseado nos dados temporais das fotografias
Calculo do intervalo entre eventos (Estratégia
simples)
◦ Intervalo < (média dos intervalos + desvio padrão)
Desvantagens
◦ Um evento real pode ser separado em mais de um
evento.
◦ Alguns eventos reais podem ser classificados como
um único evento.
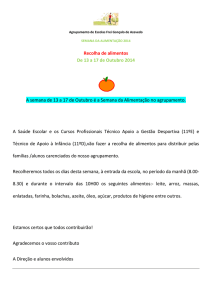
Envio das imagens para a aplicação
Organização em Eventos
Visualização dos Grupos e Eventos
Visualização das fotografias de um evento:
Base de dados
◦ 793 fotografias georreferenciadas separadas em 20
pastas
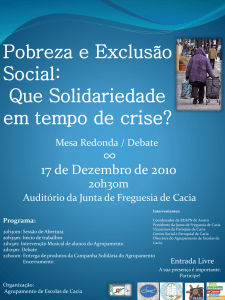
Análise do agrupamento espacial
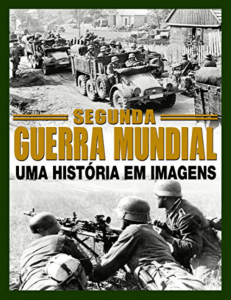
Análise do agrupamento temporal
pastas
Grupos espaciais
Pastas
separadas
Pastas
agrupadas
Agrupamento espacial isoladamente não
organiza as fotografias em eventos, pois pode
existir vários eventos próximos (espacialmente)
◦ Exemplo:
Aniversário – Restaurante Estação da Cachaça - Campina
Grande – PB no dia 05/08/2007
Festa– Restaurante Magia do Verde - Campina Grande – PB
no dia 10/11/2007
Inconsistências:
◦ Grupos com mais de uma pasta (Solução: Segmentação
temporal)
◦ Fotos de uma única pasta separadas em vários grupos
(Solução: Pós-processamento manual ou automático)
Separa os grupos que contém fotografias de
mais de uma pasta
Pode gerar as inconsistências:
◦ Separar uma única pasta em mais de um evento
◦ Agrupar mais de uma pasta em um único evento
Cluster
Agrupamento Espacial:
◦ Calcular o valor de epsilon para o DBSCAN de forma
adaptativa.
Segmentação Temporal:
◦ Executar antes e depois do agrupamento espacial
◦ Utilização de informações externas (Ex: agenda do
usuário) para uma melhor classificação temporal das
fotos
Permitir a organização manual
Atribuir nome aos eventos automaticamente.
◦ Ex: gazetteer’s, web services, agenda do usuário, etc.
Medidas de pós-processamento para auxiliar a
correção de erros
Organização automática facilita o
gerenciamento das fotografias dos usuários
A organização automática está sujeita a erros
O DBSCAN é um algoritmo satisfatório para o
agrupamento espacial
Mor Naaman, Yee Jiun Song, Andreas
Paepcke, Hector Garcia-Molina. Automatic
Organization for Digital Photographs with
Geographic Coordinates. In proceedings,
Fourth ACM/IEEE-CS Joint Conference on
Digital Libraries, (JCDL 04), June 2004.
Winner, Vannevar Bush Best Paper Award.
Introduction to Data Mining, 1st. Edition.
Pang-Ning Tan, Michael Steinbach, Vipin
Kumar. Addison-Wesley, 2006