Material de apoio: interacção gravítica
Equação
do Movimento
movimento rectilíneo
referencial do CM de M
r
M
m
F
v
a t ur constante
r (t ) r (t )ur
distância do CM de m ao CM de M
Mm
F G 2 ur
M
a
G
ur
r
2
r
F ma
d 2 r d 2 (rur ) d 2 r
a 2
2 ur rur
2
M
dt
dt
dt
ru r G 2 u r
r
equação do movimento
pode ser obtida uma equação mais simples,
recorrendo à expressão da energia mecânica que
se conserva
Material de apoio: interacção gravítica
Equação
do Movimento
movimento rectilíneo
v
a t ur constante
referencial do CM de M
r
m
F
1
Mm
2
E mv G
2
r
d (rur ) d (rur )
v v
rur rur r 2
dt
dt
M
E
vector constante
1
Mm
2
Mm
mr 2 G
r
E
G
2
r
m
r
equação do movimento
+ : movimento de afastamento, distância aumenta com o tempo
- : movimento de aproximação, distância diminui com o tempo
Material de apoio: interacção gravítica
Equação
do Movimento
movimento rectilíneo
r
v
a t ur constante
2
Mm
E G
m
r
r
dr
2
Mm
E
G
r0
dt
m
r
dr '
2
Mm
E G
m
r'
constante
t
dt '
t
0
integral com solução analítica, embora complicada
expressão analítica para o vector posição: conhecida a posição de m t
E 0 m atinge distância máxima e reaproxima-se, não escapa ao campo gravítico
E 0 m atinge o com velocidade = 0, escapa ao campo gravítico
E 0 m atinge o com velocidade > 0, escapa ao campo gravítico
Material de apoio: interacção gravítica
Equação
do Movimento
movimento curvilíneo
referencial do CM de M
m
r
M
r (t ) r (t )ur (t )
distância e direcção variam com o tempo
E
F
1
Mm
mv 2 G
2
r
d (rur ) d (rur )
v v
r ur r
u r ur r
u r 2 r 2 2 r 2 r 2 2
v
v
dt
dt
v
v
r
r
2
1
Mm
1
1
L
Mm
E m r 2 r 2 2 G
L mr 2 E mr 2
G
2
r
2
2 mr 2
r
derivando em ordem ao tempo obtem-se (E e L são constantes)
L2 1
1 2
Mm
d
d mr
d
G
2
2
2
m
r
dE
L
r
2
r
mrr;
-GMm r
0;
;
dt
dt
dt
m r3
dt
r2
Material de apoio: interacção gravítica
Equação
do Movimento
movimento curvilíneo: obtem-se a equação
referencial do CM de M
r
M
L2 1
1
r 2 3 GM 2 0
m r
r
m
F
equação do movimento que não tem solução analítica
é sempre possível resolução numérica-computacional
MAS é possivel obter uma equação para a trajectória com solução analítica
trajectória plana : posição determinada apenas por 2 coordenadas : r e
obtem-se expressão analítica para a função r ()
Material de apoio: interacção gravítica
Equação
do Movimento
movimento curvilíneo: obtenção da função r()
dr d
dr
d dt
d
L
L mr 2
2
mr
r ( ) r
r
L dr
mr 2 d
d L dr
d L dr L
L2 1 dr
L2 1 d 2 r
r
r 2 2 5
2 4
2
2
2
d mr d
d mr d mr
m r d m r d 2
defina-se a variável
1
r
1
2
2
2
2
2 dr
1
d
1 dr
d
1
d
r
2
dr
1
d
r
r
2
r
d
dr d
r d
d 2
r 2 d 2
r 3 d
r 2 d 2
2
pelo que
d
L2 2 d 2
r 2
m
d 2
que inserindo na equação do
movimento conduz a:
Material de apoio: interacção gravítica
Equação do Movimento
movimento curvilíneo: obtenção da função r()
inserindo na equação do movimento
L2 2 d 2 L2 3
d 2
2
2
2 GM 0
( 0 )
2
2
m
d
m
d
d 2 ( 0 )
( 0 )
2
d
GMm 2
L2 constante
equação diferencial já conhecida
equação do oscilador harmónico com W=1
solução analítica muito simples
( ) 0 A cos( 0 )
a determinar em função das constantes do movimento E e L
= 0 por ajuste
do sistema
de eixos
Material de apoio: interacção gravítica
Equação do Movimento
movimento curvilíneo: obtenção da função r()
d 1 A
definindo
d 1 0
A
0
relembrando 1 r
cáculo de d=1/A e =A/0 em função de E e L
d
1 cos
r ( )
1
1 L2
Mm
2
E mr
G
2
2 mr 2
r
d 1 d
1
1 d d
1 d
1
r r
2 2
2
r 2 2
d dt
d dt
d
1
d
d
A cos 0 A2 sin 2
d
d
2
2
d 2
d
2
L2
2
2 4
m r
Material de apoio: interacção gravítica
Equação
do Movimento
movimento curvilíneo: obtenção da função r()
assim
1
1 L2 2
2
A sin 2
mr
2 m
2
1 L2
1 L2
2
A
cos
0
2
2
2
m
mr
Mm
G r GMm A cos 0
introduzindo na equação da energia
conduz a
2
Mm
2m
2m 2
2
A 2 E G 2 2
L
L
L
2
dividindo por 02 e relembrando que 2 A2 02
2E L
2
1
m GMm
2
Mm
G L
2
Material de apoio: interacção gravítica
Equação
do Movimento
movimento curvilíneo: obtenção da função r()
2
assim
2
E
L
d
2
r ( )
1 cos
1
m GMm
L2
d
GMm2
parâmetros da cónica expressos em função
das quantidades do movimento E e L
equação geral da cónica
– excentricidade
d - distância do foco F à directriz D
o que define uma cónica: a razão das distâncias de qualquer ponto P ao foco
e à directriz é igual à excentricidade
D
cónica
r
P
distância de P ao foco
r
d r cos
F
d
distância de P à directriz
r (d r cos )
d
1 cos
r
Material de apoio: interacção gravítica
Equação
do Movimento
movimento curvilíneo: obtenção da função r()
as 3 cónicas
E 0 < 1 – cónica é uma elipse: m não tem energia para escapar ao
campo gravítico de M trajectória fechada
E 0 = 1 – cónica é uma parábola: m tem energia (mínima) para
escapar ao campo gravítico de M trajectória aberta
E 0 > 1 – cónica é uma hipérbole: m tem energia para escapar ao
campo gravítico de M trajectória aberta
foco da cónica encontra-se na origem do referencial
origem do referencial é o CM de M, a massa que cria o
campo gravítico a que m está sujeita : centro da força
foco da cónica está
no CM de M
Material de apoio: interacção gravítica
Equação
do Movimento
movimento curvilíneo: reconhecendo as cónicas: parábola = 1
y
r
F c
d
d
1 cos
1 cos
1 r ( )
r ( )
D
2
2
d r r
cos
d
x
r
d
x
r
x2 y 2
x
P
V
x
x
d
1 2
y
2
2d
equação cartesiana de uma parábola
com vértice V em (d/2,0)
d
no vértice V tem-se: 0 : x r c d x r c d
2
relaciona as distâncias do foco ao vértice e do foco à directriz
O foco é o centro da força
Material de apoio: interacção gravítica
Equação do Movimento
movimento curvilíneo: reconhecendo as cónicas: elipse < 1
D
y
P
r
b
V2
a
O
r2
c
V1 x
F
d
1 cos d r r
cos
r ( )
x
2
2
2
2
d x x y
V1 : 0 r a c d a c (a c)
V2 : r a c d a c (a c)
a - semieixo maior
b - semieixo menor
d
equação cartesiana de uma elipse com
centro O em (-c,0)
O foco é o centro da força
c
a2 c2
1 d
a
a
( x c) 2
y2
2
1
2
2
a
a
c
b2
= 0 (a = b) : circunferência
Material de apoio: interacção gravítica
Equação do Movimento
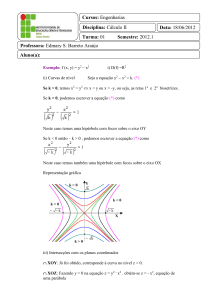
movimento curvilíneo: reconhecendo as cónicas: hipérbole > 1
y
P
r
F
d
1 cos d r r
cos
r ( )
x
2 d x 2 x 2 y 2
D
V1
a
r2
V2
O
V1 : 0 r c a d c a (c a )
x V2 : r a c d a c (a c)
c
c2 a2
1 d
a
a
d
c
equação cartesiana de uma hipérbole
com centro O em (c,0)
O foco é o centro da força
( x c) 2
y2
2
1
2
2
a
a
c
b2
Nota: o ramo direito da hipérbole seria a trajectória se no
foco estivesse o centro de uma força repulsiva
Material de apoio: interacção gravítica
Leis
de Kepler
1ª Lei : todos os planetas do sistema solar descrevem órbitas
elípticas com o sol num dos focos
planetas não escaparam ao campo gravítico do sol descrevem
trajectórias fechadas com E 0
elipses são as únicas soluções da equação do movimento com
E0
P
r
b
c
V2
a
O
F
V1
Sol no foco: centro da força
V1- periélio: ponto de menor distância do planeta ao Sol, (a-c), menor Ep, maior velocidade
V2- afélio: ponto de maior distância do planeta ao Sol, (a+c), maior Ep, menor velocidade
Material de apoio: interacção gravítica
Leis de Kepler
2ª Lei : o vector , definido pelo sol e planeta, varre áreas iguais
em intervalos de tempo iguais
porque d é infinitesimal
P'
P' '
dr rdu drur
d
r
P
rdu
O
Sol
planeta
dAPOP''
dAPOP' dAPOP''
área varrida por r em dt
área do triângulo rectângulo:
ângulo recto em P
dAPOP'' 1 2 d
1
1 2
r rd
r
r
2
dt
2
dt
2L m
constante do movimento
dAPOP'' 1 L
constante
dt
2m
taxa de varrimento
é constante
Material de apoio: interacção gravítica
Leis de Kepler
3ª Lei : o quadrado do período de revolução em torno do sol é
proporcional ao cubo do semieixo maior da elipse a
2
T 1 L
dAPOP'' 1 L
1 L
1
L
2
A
dt
T A2
T
0 2 m
dt
2m
2m
4 m2
área total varrida num período = área da elipse
A ab
L2
d
GMm 2
a2 c2 b2
d
a
a
2
(
2
)
T2
a3
GM
constante de proporcionalidade
Material de apoio: interacção gravítica
Leis de Kepler
3ª Lei numa órbita circular
F
sol
Mm
v2
2
2
3 2
G 2 m
GM rv r (r ) r
r
r
T
força gravítica é puramente normal
2
(
2
)
T2
r3
GM
2
Material de apoio: interacção gravítica
Superfície da Terra (planeta)
movimento curvilíneo dum grave é parabólico
elipse tem que se confundir com uma parábola na vizinhança do
eixo: ~ 0
O- centro da elipse
O
F
c
r
~ 0 rcos
c a
P
x
a
x
( x c)
y
a2 2
2
2
2 1 ( x c) a 2 y
2
a
b
b
2
troço de elipse que se
confude com uma
parábola
2
a2 2
( x c) a ( x c) a 2 y
b
2a
superfície da Terra
F- foco: CM da Terra
origem do referencial
x (a c)
a 2
y
2
2b
parábola de vértice em (a-c,0)
Material de apoio: interacção gravítica
Superfície da Terra (planeta)
movimento curvilíneo dum grave é parabólico
hipérbole tem que se confundir com uma parábola na vizinhança
do eixo: ~ 0
r
F
~ 0 c rcos
a
P
O
x
a
c
superfície da Terra
F- foco: CM da Terra
origem do referencial
x
( x c) 2 y 2
a2 2
2
2
2 1 ( x c) a 2 y
2
a
b
b
troço de hipérbole
que se confude
com uma parábola
a2 2
( x c) a
( x c) a 2 y
b
2a
a 2
x (c a ) 2 y
2b
parábola de vértice em (c-a,0)