Experimento: controle de tensão de
saı́da em um circuito RC
Controle I 0.1
Paulo Roberto Brero de Campos
Introdução
Neste experimento será realizado um controle para manter constante a tensão de saı́da aplicada
em um circuito RC. O valor da tensão de saı́da é definido a partir uma tensão de referência.
Este experimento é um sistema regulador, pois o objetivo é manter a tensão de saı́da constante,
independente de variações na carga.
Para todos os circuitos observe a tensão de referência no canal 1 do osciloscópio e a tensão na
saı́da (sobre o capacitor do circuito RC) no canal 2 do osciloscópio.
0.2
Explicação sobre os circuitos
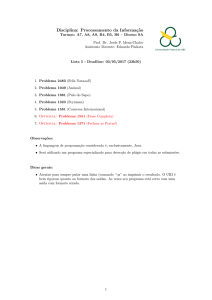
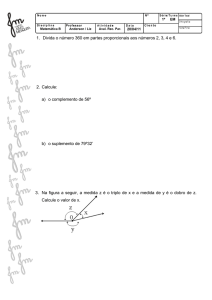
Nas figuras 3, 4 e 5 o bloco somador é composto pelo amplificador operacional 1, (AO1).
Na figura 3, o amplificador operacional (AO2) atua como um compensador proporcional, cujo
ganho é dado por K = R/P .
O integrador puro é mostrado na figura 4. O amplificador operacional (AO2) atua como um
integrador, cujo ganho do conjunto capacitor (C) e potenciômetro é dado por K = 1/P C.
Na figura 5, o amplificador operacional 2 (AO2) atua como um compensador C(s), com um
pólo na origem (integrador) e um zero cuja função de transferência é dada por C(s) = − (s+b)
. O
s
valor do zero é dado por b =
1
.
RC
O ganho é dado por K = R/P .
Como alternativa ao LM741, pode-se utilizar o TL071 ou TL072 (com 2 amplificadores no
mesmo CI), mostrado na figura 2.
1
Figura 1: TL071 e TL072
Figura 2: Amplificador operacional 741
0.3
Procedimentos
0.3.1
Montagem do compensador Proporcional
1. Monte o sistema de controle em malha fechada, como mostrado na figura 3. Aplique um
degrau de valor 1V na entrada de referência, e meça o erro em regime e o tempo de estabilização, para o potenciômetro no valor de 2, 9KΩ. Calcule o valor do ganho K.
2. Ajuste o potenciômetro para o valor de 1, 0KΩ. Calcule o valor do ganho K e meça o tempo
de estabilização ts e o erro em regime.
3. Para P = 600Ω, calcule o valor do ganho K e meça o tempo de estabilização ts e o erro em
regime.
4. Analise e comente os resultados obtidos.
Figura 3: Sistema de controle com compensador proporcional
0.3.2
Montagem do compensador Integral
1. Monte o sistema de controle em malha fechada, como mostrado na figura 4, e para uma
entrada degrau de valor 1V, meça o erro em regime e o tempo de estabilização, com o
2
potenciômetro em 2, 9KΩ. Calcule o valor do ganho K.
2. Para P = 600Ω, calcule o valor do ganho K e meça o tempo de estabilização ts .
3. Para P = 1000Ω, calcule o valor do ganho K e meça o tempo de estabilização ts .
4. Analise e comente os resultados obtidos. Compare com o sistema proporcional.
Figura 4: Sistema de controle com compensador integral
0.3.3
Montagem do compensador Integral com um zero
1. Monte o sistema de controle em malha fechada, como mostrado na figura 5, e para uma
entrada degrau de valor 1V , meça o erro em regime e o tempo de estabilização, para o
potenciômetro em 2, 9KΩ. Calcule o valor do ganho K.
2. Para P = 100Ω, calcule o valor do ganho K e meça o tempo de estabilização ts .
3. Para P = 1000Ω, calcule o valor do ganho K e meça o tempo de estabilização ts .
4. Analise e comente os resultados obtidos. Compare com os outros dois sistemas.
Figura 5: Sistema de controle com compensador integral e com um zero
3