ESTUDO SOBRE CONTROLE DE MOTORES DE INDUÇÃO TRIFÁSICOS
Autores : Marina PADILHA, Tiago DEQUIGIOVANI.
Identificação autores: Engenharia de Controle e Automação - Bolsista Interno; Orientador IFC - Campus Luzerna.
Introdução
Em aplicações industriais, o motor de indução trifásico é a principal fonte de
movimento dentre os outros motores. As aplicações deste motor vão além da manufatura e
produção, estando presentes também em prédios e residências realizando tarefas como
acionamentos de bombas, compressores, ventiladores, agitadores, moinhos, esteiras,
elevadores, entre outros (BARNES, 2003).
A popularidade deste motor deve-se, além desta vasta gama de aplicações, à sua
robustez, confiabilidade, preço baixo e reduzida manutenção. Entretanto, para ser mais
vantajoso industrialmente, é necessário que o motor trabalhe em velocidades ou torque
diferentes do nominal. Para isso, é necessária a inserção de conversores de potência e
circuitos de controle para ajustar os parâmetros do motor ao desejado para a operação
(PAREKH, 2003).
Em vista disso, este trabalho tem por objetivo apresentar os métodos de controle de
motor de indução trifásico, abrangendo a construção básica deste motor e algumas
características. Em seguida são apresentadas as topologias de inversores que podem ser
utilizados e os métodos de controle.
Material e Métodos
O desenvolvimento deste trabalho se deu exclusivamente através de pesquisa
bibliográfica, sendo apresentadas as características do motor, as topologias de conversores
utilizadas para o seu acionamento e os tipo de controle aplicáveis.
Resultados e discussão
O motor de indução trifásico é composto por duas partes eletromagnéticas, uma fixa,
estator, e outra rotativa, rotor. Ambos são compostos por um circuito elétrico que conduz
corrente e um circuito magnético que conduz fluxo magnético. O estator é alimentado por
tensão trifásica e o rotor por correntes induzidas pelo próprio estator (BARNES, 2003).
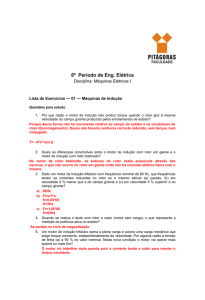
Os enrolamentos do estator são construídos nas ranhuras da parte fixa do motor. Os
enrolamentos do rotor são barras sólidas de alumínio que são fundidas nas ranhuras do rotor e
coladas em curto circuito por anéis de alumínio fundidos localizados em cada extremidade do
rotor. Um corte transversal desse conjunto pode ser observado na Figura 1(a). A Figura 1(b)
apresenta as outras partes de um motor de indução.
(a)
(b)
Figura 1 - Motor de indução trifásico: (a) corte transversal e (b) componentes do motor
Fonte: Barnes, 2003.
Sobre os motores CA, podem ser descritas as seguintes características: (BARNES,
2003)
A velocidade do motor é dada pelo número de polos ( ) e pela frequência de alimentação
( ) do motor. A velocidade de rotação ( ) do motor síncrono dado por:
Para o motor assíncrono, a velocidade no eixo ( ) possui um ‘escorregamento’ em
relação à velocidade de rotação do fluxo do estator, sendo dada por:
(
)
O fluxo do entreferro ( ) é diretamente proporcional à amplitude da tensão de
alimentação e inversamente proporcional à frequência da tensão de alimentação.
O torque de saída depende do produto do fluxo do entreferro e da corrente do rotor.
A potência de saída é proporcional ao produto do torque de saída com a velocidade de
rotação:
Acionamento do Motor de Indução Trifásico
O acionamento de máquinas CA compreende topologias com malha intermediária e
topologias de conversão direta. A topologia com malha intermediária é a mais utilizada.
Nesta, a conversão ocorre com dois estágios: a tensão alternada de alimentação é retificada
fornecendo tensão CC ou corrente CC, em seguida, este link CC é convertido em tensão
alternada a partir de um inversor (STEPHAN, 2003).
As topologias com malha intermediária são dividas em VSI (Voltage Source
Inverter) e CSI (Current Source Inverter):
a)
VSI: Nesta topologia, a malha intermediária funciona como uma fonte de
tensão. O sinal alternado oriundo da rede de alimentação é retificado com uma ponte de
diodos e após filtrado com capacitores, para se obter uma fonte de tensão CC. Os inversores
VSI, por sua vez, podem ser classificados em PAM (Pulse Amplitude Modulation) ou PWM
(Pulse Width Modulation). Outra topologia que também é inserida nessa classificação é a CRVSI-PWM, que é o conversor VSI-PWM com realimentação de corrente (Current
Regulation).
b)
CSI: Nesta topologia, a malha intermediaria comporta-se como uma fonte de
corrente. O sinal da rede de alimentação é retificado e, com auxílio de um indutor, se obtêm
uma fonte de corrente.
Controle do Motor de Indução Trifásico
Segundo (PAREKH), há três abordagens que podem ser feitas no controle do motor de
indução trifásico: o método escalar, método vetorial e o controle direto de torque.
Controle Escalar
Este tipo de controle está baseado no modelo em regime permanente do motor de
indução. O motor de indução é alimentado por uma forma de onda de amplitude e frequência
variáveis, onde a relação V/f é mantida constante para manter o torque constante na faixa de
operação. Geralmente, no controle escalar não é necessário realimentação, uma vez que a
velocidade de rotação é dependente da frequência da tensão aplicada no estator. Este tipo de
controle é de baixo custo e uma solução de fácil implementação, pois não é necessário
conhecimento aprofundado do funcionamento do motor. A desvantagem reside no fato do
torque desenvolvido não ser diretamente controlado e dependente da carga, e em frequências
acima da nominal ocorre um enfraquecimento acentuado do torque. O controle escalar pode
ser implementado via PWM-senoidal, PWM de seis passos, modulação space-vector PWM
(SVMPWM), e SVMPWM com sobre modulação (PAREKH, 2003).
Controle Vetorial
Este tipo de controle é utilizado quando se deseja um bom comportamento dinâmico,
semelhante ao motor de corrente contínua, e está baseado no modelo elétrico transitório. Estas
equações possuem certa complexidade, pois devem considerar tanto as correntes de estator
quanto as corrente de rotor e as indutâncias próprias e mútuas entre estes enrolamentos
(PAREKH, 2003).
Para conseguir o bom comportamento dinâmico, é necessário aplicar uma
transformação de variáveis que conduz a uma simplificação nas equações do modelo,
chamada transformação vetorial. Desta forma, a característica não-linear e complexa de uma
máquina de indução, que possui os eixos de fluxo e de conjugado fortemente acoplados, pode
ser transformada para variáveis mais simples de controle.(ARAUJO, 2011).
Há várias abordagens que podem ser feitas no controle vetorial, existindo dois grandes
grupos, o controle por quadratura e o controle por escorregamento. Dentre estas, há
abordagens por fluxo do entreferro, fluxo do estator e fluxo do rotor (STEPHAN, 2008).
Outra diferença é em relação ao controle em quadratura, que pode ser direto ou indireto,
através da utilização de sensores ou da aplicação de observadores computacionais,
respectivamente (ARAUJO, 2011).
Controle Direto de Torque (DTC – Direct Torque Control)
A diferença deste tipo de controle para o controle vetorial é que o controle direto de
torque não possui padrão de chaveamento fixo. O DTC vai chavear o inversor de acordo com
as necessidades da carga. Devido à eliminação do padrão fixo de chaveamento, a resposta do
DTC é extremamente rápida durante as mudanças instantâneas da carga (PAREKH, 2003).
A essência desta tecnologia é o seu modelo adaptativo de motor. Este modelo é
baseando nas expressões matemáticas da teoria básica de motores, requerendo informações
sobre alguns parâmetros do motor. O algoritmo captura todos esses parâmetros, e quanto
melhor a sintonia destes valores, melhor a precisão de velocidade e controle de torque sem a
utilização de sensores para essas variáveis (PAREKH, 2003).
A partir da medição do barramento CC, das correntes de linha e sabendo a posição
atual do chaveamento, é possível calcular o fluxo e o torque atuais do motor a partir do seu
modelo. Enquanto isso, a referência externa de velocidade é convertida em referência de fluxo
e torque, que serão comparadas com a do modelo, e o resultado selecionará o melhor
chaveamento em uma tabela, ocorrendo o controle direto de torque (PAREKH, 2003).
Conclusão
Este trabalho teve como principal objetivo apresentar os conhecimentos envolvidos
no controle de motores de indução. Como este tema é bastante amplo, não foi possível
abordar todos os temas envolvidos no controle, como o modelo do motor de indução, em
regime transitório e estacionário. Além disso, existem considerações a serem feitas sobre o
conteúdo harmônico na saída dos conversores, e o processamento exigido para cada tipo de
controle, que variam bastante de acordo com a técnica selecionada.
A partir deste estudo, pretende-se o desenvolvimento de uma planta de controle de
motor de indução trifásico, incialmente aplicando o método escalar para o controle da
velocidade. Com esta etapa implementada, tem-se maior facilidade para o desenvolvimento de
trabalhos sobre os outros métodos de controle aqui citados, pois a topologia do circuito de
potência e de comando não precisa ser alterada, pode-se focar somente no estudo das outras
técnicas de controle.
Referências
ARAÚJO, Amanda Guerra de. Controle vetorial de um motor de indução trifásico aplicado
em sistemas de posicionamento. Dissertação de mestrado, UFPB, 2011. Disponível em:
<http://tede.biblioteca.ufpb.br/bitstream/tede/5315/1/arquivototal.pdf>.
Acesso em 23 de
setembro de 2015.
BARNES, Malcolm. Practical Variable Speed Drives and Power Electronics. Elsevier, 2003.
PAREKH, Rakesh. AC Induction Motor Fundamentals. Microchip, 2003. Disponível em:
<http://ww1.microchip.com/downloads/cn/AppNotes/cn_00887a.pdf>. Acesso em 23 de
setembro de 2015.
STEPHAN, Richard M. Acionamento, comando e controle de máquinas elétricas. UFRJ,
2008.