Estudo e Implementação Experimental de Conversores
AC/DC de Onda Sinusoidal
Alexandre Paulo Guerreiro Morgado Jorge
Dissertação para obtenção do Grau de Mestre em
Engenharia Electrotécnica e de Computadores
Júri
Presidente:
Prof. Doutor Paulo José da Costa Branco
Orientador:
Prof. Doutor Gil Domingos Marques
Vogal:
Prof. Doutor José Manuel Dias Ferreira de Jesus
Outubro 2009
ii
Agradecimentos
Agradecimentos
Apesar de uma dissertação ser um trabalho individual, não posso deixar de agradecer a pessoas,
cujos contributos individuais, permitiram que este trabalho fosse concluído.
Em primeiro lugar, gostaria de agradecer ao Professor Gil Marques, pela orientação, disponibilidade,
dedicação e conhecimentos transmitidos, na resolução de problemas que foram surgindo no
desenrolar do trabalho.
À Lúcia Cordeiro pelo apoio prestado na realização deste trabalho.
A todos os meus amigos e colegas que partilharam comigo estes anos de formação, e que de uma ou
outra forma, contribuíram com conselhos fundamentais para a minha formação.
iii
iv
Resumo
Resumo
Actualmente, procura-se cada vez mais a melhoria nos sistemas de controlo dos conversores de
potência,
importantes
para
a
conversão
AC/DC
ou
DC/AC.
Com
a
introdução
dos
microprocessadores nos sistemas de controlo em detrimento do uso de componentes de electrónica,
os sistemas melhoraram a sua eficiência.
Neste trabalho pretende-se estudar a implementação experimental de um sistema de controlo de um
inversor de tensão, constituído por um controlador PI responsável pelo controlo da tensão no
condensador e por dois controladores PI responsáveis pelo controlo das correntes dq. Para tal,
recorreu-se ao uso de um DSP que possui software necessário para a realização do algoritmo do
sistema de controlo proposto. As leituras das tensões e das correntes são realizadas a partir de
sensores de tensão e de corrente. Para o disparo dos semicondutores do inversor é utilizado o
método do PWM que compara as tensões sinusoidais com uma onda triangular.
Os resultados comprovam o correcto funcionamento no laboratório, do inversor controlado a partir do
sistema proposto. O sistema responde correctamente a variações dos valores de referência,
verificando-se o desacoplamento entre as componentes d e q das correntes. Verifica-se portanto, que
a potência activa não é influenciada pela potência reactiva.
Palavras-chave
Conversor DC/AC, Controlador PI, DSP, PWM
v
Abstract
Abstract
Nowadays, the demand of better power converters control systems plays an important role, for DC/AC
or AC/DC conversion. With the introduction of microprocessors in control systems over the use of
electronic components, systems have improved their efficiency.
This paper aims to study the experimental implementation of a voltage source inverter control system,
comprising a PI controller responsible for controlling the voltage on the capacitor and two PI
controllers responsible for controlling the currents in the dq axes. To this end, a DSP with software
implemented was used, for the implementation of the control system proposed. The readings of
voltages and currents values are taken from voltage and current sensors. For the inverter
semiconductors gate signals, a PWM method that compares the sinusoidal voltages with a triangular
wave was used.
The results confirm the proper functioning of the inverter, controlled by the proposed system. The
system responds correctly to a variation of the reference values, verifying the decoupling between the
d and q current components. Therefore, the active power is not influenced by the reactive power.
Keywords
DC/AC Converter, PI Controller, DSP, PWM
vi
Conteúdo
Conteúdo
Agradecimentos .................................................................................................................... iii
Resumo ................................................................................................................................. v
Abstract ................................................................................................................................ vi
Conteúdo ............................................................................................................................. vii
Lista de Figuras ...................................................................................................................... x
Lista de Tabelas .................................................................................................................. xiii
Lista de Acrónimos .............................................................................................................. xiv
Lista de Símbolos ................................................................................................................. xv
1
Introdução ............................................................................................................... 1
1.1
Enquadramento ................................................................................................ 2
1.2
Motivação e Conteúdo ...................................................................................... 3
2
Modelo do Conversor .............................................................................................. 5
2.1
Conversor DC-AC ............................................................................................. 6
2.1.1
Introdução .............................................................................................................. 6
2.1.2
Transformação de Clarke ...................................................................................... 8
2.1.3
Transformação de Park ......................................................................................... 9
2.2
Modulação por Largura de Impulsos (PWM) ....................................................10
2.2.1
3
Sinusoidal PWM (SPWM) .................................................................................... 10
Controlo do Conversor ............................................................................................13
3.1
Controlo Interno da Corrente ...........................................................................14
3.1.1
Síntese da cadeia de controlo interno da corrente .............................................. 16
3.1.2
Determinação dos parâmetros do controlador PI ................................................ 18
3.2
Controlo da Tensão .........................................................................................20
3.2.1
Síntese da cadeia de controlo da tensão ............................................................ 21
3.2.2
Determinação dos parâmetros do controlador PI ................................................ 22
3.3
Simulação do Sistema de Controlo do Conversor ............................................23
3.3.1
Modelo de simulação ........................................................................................... 23
3.3.2
Parâmetros de simulação .................................................................................... 26
3.3.3
Análise de resultados .......................................................................................... 27
vii
4
Implementação do Sistema ....................................................................................31
4.1
Descrição Geral do Sistema ............................................................................32
4.2
Características do Equipamento ......................................................................35
4.2.1
Inversor de tensão ............................................................................................... 35
4.2.2
Processador Digital de Sinais (DSP) ................................................................... 38
4.2.3
Placa de Aquisição de Sinal ................................................................................ 41
4.2.4
Placa do DSP ...................................................................................................... 42
4.3
Configuração do Sistema .................................................................................44
4.3.1
4.4
5
Esquema de montagem ...................................................................................... 44
Descrição do Software .....................................................................................45
4.4.1
Ficheiro adc.c ...................................................................................................... 45
4.4.2
Ficheiro medidas.s............................................................................................... 46
4.4.3
Ficheiro multiply.c ................................................................................................ 46
4.4.4
Ficheiro transf.c ................................................................................................... 46
4.4.5
Ficheiro PI.c ......................................................................................................... 47
4.4.6
Ficheiro PWM.c ................................................................................................... 48
4.4.7
Ficheiro main.c .................................................................................................... 49
4.4.8
Fluxograma do sistema ....................................................................................... 49
Resultados .............................................................................................................51
5.1
Cadeia Aberta ..................................................................................................52
5.2
Controlo da Corrente .......................................................................................57
5.2.1
5.3
Ensaio em cadeia fechada .................................................................................. 57
Controlo da Tensão no Condensador ..............................................................65
5.3.1
Ensaio da cadeia de controlo da tensão ............................................................. 65
5.3.2
Subida da tensão de referência ........................................................................... 65
5.3.3
Descida da tensão de referência ......................................................................... 67
6
Conclusões .............................................................................................................69
A
Projecto da Placa de Aquisição de Sinal.................................................................71
A.1
Sensores de Corrente ......................................................................................72
A.2
Sensores de Tensão ........................................................................................74
A.3
Circuito Condicionador de Sinal .......................................................................75
B
Projecto da Placa do DSP ......................................................................................77
B.1
C
Circuito da Placa do DSP.................................................................................78
Código do Sistema de Controlo ..............................................................................79
C.1
Ficheiro adc.c ..................................................................................................80
C.2
Ficheiro medidas.s ...........................................................................................82
C.3
Ficheiro multiply.c ............................................................................................84
viii
D
C.4
Ficheiro transf.c ...............................................................................................84
C.4
Ficheiro PI.c .....................................................................................................88
C.5
Ficheiro PWM.c ...............................................................................................91
C.6
Ficheiro main.c ................................................................................................92
C.7
Ficheiro common.h ..........................................................................................95
Folha de Dados Técnicos .......................................................................................97
Referências ..........................................................................................................................99
ix
Lista de Figuras
Lista de Figuras
Figura 1.1. Esquema de implementação do sistema proposto. ...............................................................3
Figura 2.1. Esquema do inversor de tensão trifásico e da sua ligação à rede eléctrica trifásica. ...........6
Figura 2.2. Diagrama fasorial da Transformação de Park. ......................................................................8
Figura 2.3. Diagrama fasorial da transformação de Park. .....................................................................10
Figura 2.4. Princípio de funcionamento do SPWM [3]. ..........................................................................11
Figura 3.1. Esquema de implementação do sistema de controlo interno da corrente do inversor
de tensão. .....................................................................................................................15
Figura 3.2. Diagrama de blocos do sistema com controlador de corrente. ...........................................17
Figura 3.3. Diagrama de blocos simplificado sem o acoplamento entre as componentes d e q
da corrente. ...................................................................................................................17
Figura 3.4. Diagrama de blocos simplificado de acordo com o descrito em 3.1.2.................................18
Figura 3.5. Diagrama de blocos simplificado cuja função de transferência representada permite
o dimensionamento dos parâmetros do controlador PI. ...............................................19
Figura 3.6. Esquema de implementação do sistema de controlo de tensão com controlo interno
da corrente. ...................................................................................................................20
Figura 3.7. Esquema simplificado do sistema a controlar. .....................................................................21
Figura 3.8. Diagrama de blocos do controlo da tensão no condensador. .............................................22
Figura 3.9. Modelo utilizado para a simulação do sistema de controlo de tensão com controlo
interno de corrente. .......................................................................................................24
Figura 3.10. Bloco “Current PI Controller”. .............................................................................................25
Figura 3.11. Bloco “PI Controller”. ..........................................................................................................25
Figura 3.12. Bloco “SVPWM”. ................................................................................................................26
Figura 3.13. Variação da tensão do condensador para uma entrada em escalão na tensão de
referência do condensador aos 10 ms. ........................................................................27
Figura 3.14. Resposta das correntes nas 3 fases para uma entrada em escalão na tensão de
referência do condensador aos 10 ms. ........................................................................27
Figura 3.15. Resposta da corrente
para uma entrada em escalão na tensão de referência do
condensador aos 10 ms. ..............................................................................................28
Figura 3.16. Resposta da corrente
para uma entrada em escalão na tensão de referência do
condensador aos 10 ms. ..............................................................................................28
Figura 3.17. Variação da tensão do condensador para uma entrada em escalão na tensão de
referência do condensador aos 10 ms e na corrente aos 30 ms. ............................29
Figura 3.18. Resposta das correntes nas 3 fases para uma entrada em escalão na tensão de
referência do condensador aos 10 ms e na corrente aos 30 ms. ............................29
Figura 3.19. Resposta da corrente
para uma entrada em escalão na tensão de referência do
condensador aos 10 ms e na corrente aos 30 ms. ..................................................30
Figura 3.20. Resposta da corrente
para uma entrada em escalão na tensão de referência do
condensador aos 10 ms e na corrente aos 30 ms. ..................................................30
Figura 4.1. Esquema de implementação do ensaio em cadeia aberta do sistema no laboratório. .......33
Figura 4.2. Esquema de implementação do ensaio em cadeia fechada do sistema de controlo
da corrente no laboratório. ............................................................................................33
Figura 4.3. Esquema de implementação do ensaio em cadeia fechada do sistema de controlo
x
da tensão no laboratório. ..............................................................................................34
Figura 4.4. Módulo do conversor utilizado no laboratório do fabricante SEMIKRON. ...........................35
Figura 4.5. Módulo de disparo de um braço de potência do conversor utilizado no laboratório. ..........37
Figura 4.6. Esquemático do módulo de disparo de um braço de potência do conversor. .....................37
Figura 4.7. Esquema do microprocessador dsPIC30F4011 do fabricante MICROCHIP utilizado
para realizar o controlo do inversor de tensão. ............................................................40
Figura 4.8. Placa de Aquisição de Sinal utilizada no laboratório com os componentes
montados. .....................................................................................................................42
Figura 4.9. Circuito da Placa do DSP montado no laboratório. .............................................................43
Figura 4.10. Régua com as entradas necessárias para a interligação entre a Placa de
Aquisição de Sinal e a Placa do DSP. ..........................................................................43
Figura 4.11. Configuração do cabo que interliga o MPLAB ICD2 e a Placa do DSP. ...........................44
Figura 4.12. Esquema de montagem no laboratório. .............................................................................45
Figura 4.13. Esquema de implementação do controlador PI. ................................................................48
Figura 4.14. Fluxograma do programa que efectua o sistema de controlo. ..........................................50
Figura 5.1. Correntes de saída (fases a e b) do inversor trifásico com amplitude de 5 A (escala
de 10mV/A). ..................................................................................................................52
Figura 5.2. Correntes de saída (fases a e b) do inversor trifásico com amplitude de 10 A (escala
de 100mV/A). ................................................................................................................53
Figura 5.3. Tensões compostas à saída do conversor. .........................................................................54
Figura 5.4. Tensões compostas à saída do conversor. .........................................................................54
Figura 5.5. Formas de onda da tensão
e da corrente
em valores por unidade, para um
ensaio com uma corrente de saída de 5 A. ..................................................................55
Figura 5.6. Representação das correntes
e , em valores por unidade, para um ensaio com
uma corrente de saída de 5 A. .....................................................................................55
Figura 5.7. Formas de onda da tensão
e da corrente , em valores por unidade, para um
ensaio com uma corrente de saída de 10 A. ................................................................56
Figura 5.8. Representação das correntes
e , em valores por unidade, para um ensaio com
uma corrente de saída de 10 A. ...................................................................................56
Figura 5.9. Resposta no tempo das correntes ( e
referência
e
e para
) do sistema para uma corrente de
(escala de 100 mV/A). .......................58
Figura 5.10. Resposta no tempo das correntes (
referência
e
e para
) do sistema para uma corrente de
(escala de 100 mV/A). .......................58
e
Figura 5.11. Formas de onda da tensão
e da corrente , em valores por unidade, para um
ensaio com uma corrente de saída de 5 A e um valor de
. .........................59
Figura 5.12. Representação das correntes
e , em valores por unidade, para um ensaio
com uma corrente de saída de 5 A e um valor de
. .....................................59
Figura 5.13. Resposta no tempo das correntes ( e
referência
e
e para
) do sistema para uma corrente de
(escala de 10 mV/A). ......................60
Figura 5.14. Resposta no tempo das correntes ( e
referência
e
e para
) do sistema para uma corrente de
(escala de 10 mV/A). ......................61
Figura 5.15. Formas de onda das correntes nas 3 fases para uma variação de
de 0 para 10
A e se mantém
(escala de 10mV/A). ................................................................61
Figura 5.16. Representação das correntes
e , em valores por unidade, para uma variação
de
de 0 para 10 A e se mantém
. ..................................................................62
Figura 5.17. Formas de onda das correntes nas 3 fases para uma variação de
de 0 para 10
A e se mantém
(escala de 10mV/A). ................................................................63
Figura 5.18. Representação das correntes
e
, em valores por unidade, para uma variação
xi
de
de 0 para 10 A e se mantém
. ..................................................................63
Figura 5.19. Representação das correntes
e , em valores por unidade, para uma variação
de de 0 para -10 A e se mantém
. .................................................................64
Figura 5.20. Formas de onda da tensão (a amarelo), da corrente (a roxo) numa das fases e da
tensão no condensador (a azul) para um aumento de tensão no condensador
de 250 V para 350 V. ....................................................................................................65
Figura 5.21. Resposta da corrente (a roxo) e da tensão no condensador (a azul) para uma
variação de 250 V para 350 V na tensão do condensador. .........................................66
Figura 5.22. Resposta no tempo da corrente
para uma variação de tensão no condensador
de 250 V para 350 V. ....................................................................................................66
Figura 5.23. Formas de onda da tensão (a amarelo), da corrente (a roxo) numa das fases e da
tensão no condensador (a azul) para uma diminuição da tensão no
condensador de 250 V para 350 V. ..............................................................................67
Figura 5.24. Resposta da corrente (a roxo) e da tensão no condensador (a azul) para uma
variação de 250 V para 350 V na tensão do condensador. .........................................68
xii
Lista de Tabelas
Lista de Tabelas
Tabela 3.1. Parâmetros utilizados para as simulações. .........................................................................26
Tabela 4.1. Características principais do módulo do conversor do fabricante SEMIKRON. .................36
Tabela 4.2. Função de cada conector do módulo de disparo. ...............................................................38
Tabela 4.3. Valores de tensão admissíveis pelo microprocessador nas portas utilizadas. ...................40
Tabela 5.1. Valores de corrente obtidos no microprocessador. .............................................................53
xiii
Lista de Acrónimos
Lista de Acrónimos
AC
Alternating Current
ADC
Analog-to-Digital Converter
BJT
Bipolar Junction Transistor
DC
Direct Current
DSP
Digital Signal Processing
IGBT
Insulated Gate Bipolar Transistor
MOSFET
Metal Oxide Semiconductor Field Transistor
PAS
Placa de Aquisição de Sinal
PD
Proportional-Derivative
PI
Proportional-Integral
PWM
Pulse Width Modulation
SPWM
Sinusoidal Pulse Width Modulation
xiv
Lista de Símbolos
Lista de Símbolos
Amplitude da tensão de saída do inversor
Sinais de comando do inversor de tensão
Corrente no condensador
Corrente que circula na carga em paralelo com o condensador
Corrente continua à entrada do inversor de tensão
Ganho Integral do controlador
Ganho Proporcional do controlador
Potência activa no referencial de Park
Potência reactiva no referencial de Park
Período de comutação do inversor de tensão
Constante de tempo da cadeia de controlo interno de corrente
Tensão no condensador
Tensão de referência no condensador
Tensões nas 3 fases da rede
Frequência da modulação PWM
Correntes nas 3 fases à saída do inversor de tensão
Correntes no referencial de Park
Correntes de referência no referencial de Park
Correntes no referencial de Clarke
Tensões nas 3 fases à saída do inversor de tensão
Tensões no referencial de Park
Tensões no referencial de Clarke
Componentes da Transformação de Park
Tensões compostas à saída do inversor
Componentes da Transformação de Clarke
Frequência angular de corte
Condensador
Indutância à saída do inversor
xv
Neutro
Resistência à saída do inversor
Ângulo entre a componente d da Transformação de Park e o eixo α
Constante de tempo dos parâmetros da rede
Frequência angular
xvi
Capítulo 1
Introdução
1 Introdução
Uma breve descrição do sistema de controlo a implementar é feita neste capítulo. Para além disso, os
objectivos principais da dissertação encontram-se também definidos neste capítulo. No fim é
fornecida uma estrutura dos capítulos escritos.
1
1.1 Enquadramento
Nos últimos anos tem-se assistido a uma procura da melhoria da qualidade de energia e da eficiência
dos sistemas de potência existentes, devido à crescente instalação de geração a partir de recursos
renováveis. Porém, na maior parte dos casos, a qualidade de energia é inferior comparada com a
energia produzida por uma unidade de geração cuja fonte não seja instável ao longo do tempo. No
sentido de proporcionar esta melhoria na qualidade de energia, é necessário que os sistemas
possuam um sistema de controlo fiável e robusto.
A energia produzida a partir de uma fonte solar, por exemplo, pode ser armazenada num sistema de
armazenamento. Para que esta energia seja injectada na rede é necessário convertê-la em tensão
alternada, através da utilização de inversores trifásicos. Estes inversores convertem tensão contínua
em tensão alternada. São constituídos por semicondutores que necessitam de um sistema de
comando adequado para entrarem em condução. Para tal, hoje em dia, utilizam-se diversos sistemas
de controlo, que controlam as correntes e as tensões de saída do inversor, de acordo com os valores
de referência pretendidos.
Muitos dos sistemas de controlo anteriormente realizados utilizavam muitos componentes
electrónicos, o que, em caso de avaria de algum componente, trazia grandes problemas de fiabilidade
e de robustez. Com a introdução de microprocessadores (como é o caso dos DSP’s) nos sistemas de
controlo, reduziu-se o número de componentes electrónicos e o espaço que estes ocupam e a
eficiência do sistema melhorou.
Este trabalho tem como objectivo estudar a implementação no laboratório de um sistema de controlo
de um conversor, controlado por um DSP, que contém software para a realização do controlo de
tensão com cadeia de controlo interno de corrente.
Para que este controlo seja possível ser implementado é necessário que o sistema proposto
contenha sensores de corrente e de tensão indispensáveis para a leitura dos valores de corrente e de
tensão no DSP. Após estes valores estarem disponíveis no microprocessador, as rotinas para
implementação dos controladores PI da tensão no condensador e das correntes entram em
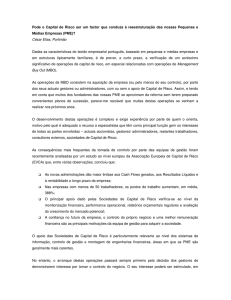
funcionamento. A Figura 1.1 apresenta o esquema de implementação simplificado no laboratório.
2
Inversor
L
R
Udc
Rede
6 sinais PWM
DSP
Udc
PAS
ia
ib
va
vb
Figura 1.1. Esquema de implementação do sistema proposto.
1.2 Motivação e Conteúdo
Com o presente trabalho pretende-se verificar a influência dos controladores PI no sistema de
controlo e a sua implementação num microprocessador. Outro ponto importante que se pretende
verificar é a resposta do sistema a perturbações impostas, por forma a proporcionar a estabilidade do
sistema a implementar.
A dissertação é constituída por 6 capítulos:
Capítulo 1 – Introdução
Capítulo 2 – Modelo do Conversor
Capítulo 3 – Controlo do Conversor
Capítulo 4 – Implementação do Sistema
Capítulo 5 – Resultados
Capítulo 6 – Conclusões
3
4
Capítulo 2
Modelo do Conversor
2 Modelo do Conversor
Neste capítulo encontra-se uma descrição geral da topologia de um conversor DC-AC e do seu
modelo, onde são focadas as suas equações. São descritas também as transformações de variáveis
necessárias para simplificar a implementação do sistema de controlo, tais como a Transformação de
Clarke e a Transformação de Park.
No final do capítulo encontra-se a descrição detalhada do método de modulação por largura de
impulso de tensões utilizado neste trabalho, denominado por Sinusoidal Pulse Width Modulation e
vulgarmente conhecido como SPWM.
5
2.1 Conversor DC-AC
2.1.1 Introdução
Um conversor DC-AC aceita tensão contínua (DC) à sua entrada, proveniente de um condensador ou
de um outro sistema de armazenamento de energia, e converte-a em tensão alternada sinusoidal
(AC).
Tipicamente utilizam-se IGBT’s (Insulated Gate Bipolar Transistor), para a conversão. Este tipo de
semicondutor é adequado para sistemas de electrónica de potência com tensões e potências
elevadas, onde o sistema de controlo é extremamente rápido e que requerem uma frequência de
comutação elevada. Estes dispositivos melhoram a performance dos sistemas de electrónica de
potência, aumentando a eficiência e diminuído o nível de ruído audível.
Usualmente, um IGBT é conhecido como um dispositivo com as características de entrada de um
MOSFET e com as características de saída de um BJT (Bipolar Junction Transistor). O IGBT combina
a facilidade de controlo do disparo e a elevada impedância de entrada dos MOSFET, com a
capacidade, dos transístores bipolares, de funcionamento com valores de corrente e tensão elevados.
Para além disso, os IGBT’s apresentam baixas perdas de condução, que caracterizam os transístores
bipolares [1].
Actualmente no mercado existem conversores constituídos por módulos IGBT compactos, e que
utilizam poucos componentes de electrónica.
O esquema geral do inversor de tensão trifásico encontra-se representado na Figura 2.1.
Ic
Idc
Ga
S1
Gb
S3
Gc
S5
ia
ib
ic
ua
Udc
ub
uc
Ga
S2
Gb
S4
Gc
R
L
ea
R
L
eb
Rede
R
L
ec
S6
Figura 2.1. Esquema do inversor de tensão trifásico e da sua ligação à rede eléctrica trifásica.
6
O inversor de tensão trifásico é constituído por seis semicondutores dispostos por 3 braços, cada um
com dois semicondutores. A tensão contínua armazenada no condensador irá ser convertida em
tensão alternada sinusoidal e sincronizada com a tensão da rede. A protecção do inversor é
assegurada pelos díodos colocados em antiparalelo com os semicondutores.
Para o modelo do conversor considera-se que a potência é positiva quando circula do circuito de
tensão contínua para a rede eléctrica.
O estado de comutação do inversor pode assim ser determinado por três funções, uma por cada
braço de potência. As tensões de saída do inversor são definidas por
(2.1)
(2.2)
.
(2.3)
Estas tensões são determinadas apenas pelo valor da tensão no condensador e pelos sinais de
comando dos semicondutores. Para o modelo do conversor é mais conveniente utilizar as tensões do
lado da rede, referidas ao ponto neutro. Essas tensões simples devem verificar a relação
.
(2.4)
As tensões compostas são dadas por
(2.5)
(2.6)
.
(2.7)
Colocando as tensões simples em função das tensões compostas (2.5), (2.6) e (2.7), obtém-se
(2.8)
(2.9)
.
(2.10)
As tensões compostas também devem verificar a relação
.
(2.11)
Após manipulações algébricas, as tensões do lado da rede em função dos sinais de comando podem
obter-se através das equações
(2.12)
(2.13)
.
7
(2.14)
Com o objectivo de simplificar os cálculos a efectuar para controlar o disparo dos semicondutores é
necessário realizar transformações de variáveis. Para transformar o sistema trifásico variável num
sistema difásico invariável são efectuadas duas transformações: a Transformação de Clarke e a
Transformação de Park. Estas transformações irão ser descritas nos subcapítulos seguintes.
2.1.2 Transformação de Clarke
A transformação de Clarke consiste em representar um sistema de grandezas vectoriais trifásicas de
soma nula (ou seja, sem componente homopolar), tais como tensões (
e
,
e
) ou correntes ( ,
), num referencial ortogonal difásico αβ. Com esta transformação, a manipulação das tensões e
correntes do conversor é simplificada [2].
A conversão do sistema trifásico abc num sistema estático αβ0 caracteriza-se pela equação
.
Fazendo coincidir o eixo α com a fase a e, sabendo que a componente homopolar
(2.15)
é nula, a
transformação pode ser dada por
.
(2.16)
As transformações (2.15) e (2.16) convertem no sistema difásico tanto as tensões como as correntes
de um sistema trifásico. Na Figura 2.2 encontra-se representado o diagrama fasorial desta conversão.
β
b
x
xβ
xα
a α
c
Figura 2.2. Diagrama fasorial da Transformação de Park.
8
Da mesma forma, a conversão do sistema difásico para o sistema trifásico é possível através da
Transformação Inversa de Clarke. Para esse efeito é utilizada a expressão (2.17).
.
(2.17)
2.1.3 Transformação de Park
A transformação de Park consiste na passagem do referencial difásico αβ, para um referencial
ortogonal difásico dq, síncrono com a tensão da rede, que roda a uma velocidade angular
um ângulo
e que faz
com o eixo α. Este referencial encontra-se representado na Figura 2.3. O eixo d
representa a componente directa das tensões ou correntes, e o eixo q representa a componente em
quadratura das tensões ou correntes a transformar.
Uma das grandes vantagens desta transformação consiste no facto de que as tensões ou as
correntes, após a transformação, tomam valores contínuos e não sinusoidais, tornando-se assim num
sistema invariante no tempo, simplificando todas as manipulações matemáticas com tensões e
correntes.
A sincronização das tensões de saída do conversor com as tensões de referência da rede é realizada
através desta transformação.
A expressão que traduz a transformação de Park é dada por
.
(2.18)
Na expressão (2.18),
(2.19)
.
9
(2.20)
β
q
b
x
xq
ω
xd
d
θ
a α
c
Figura 2.3. Diagrama fasorial da transformação de Park.
Da mesma forma, a Transformação Inversa de Park permite a conversão do sistema difásico dq com
referencial girante para o sistema difásico αβ, através de
.
(2.21)
2.2 Modulação por Largura de Impulsos (PWM)
2.2.1 Sinusoidal PWM (SPWM)
Um inversor é, normalmente, utilizado juntamente com máquinas eléctricas de velocidade variável
para produzir tensões alternadas, sinusoidais, trifásicas e variáveis a partir de uma fonte de tensão
contínua. Uma vez que a tensão alternada é definida por duas características, como a amplitude e a
frequência, é essencial arranjar uma estratégia que permita o controlo destas grandezas.
Existem várias técnicas de modulação de largura de impulso (PWM – Pulse Width Modulation). Uma
técnica bem conhecida e utilizada em muitas aplicações consiste na técnica de modulação sinusoidal
denominada Sinusoidal Pulse Width Modulation (PWM).
Esta técnica consiste na comparação das ondas de tensão trifásicas sinusoidais modulantes, que se
pretendem à saída do inversor, com uma onda triangular portadora, com uma determinada
10
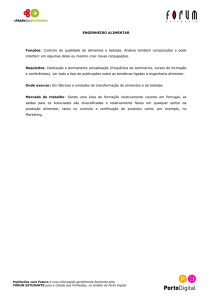
frequência. Na Figura 2.4 encontra-se o princípio de funcionamento deste tipo de modulação
sinusoidal.
Figura 2.4. Princípio de funcionamento do SPWM [3].
Para que sejam criadas as ondas sinusoidais pretendidas, desfasadas de 120º entre cada braço, o
método realiza a modulação com ondas sinusoidais com baixa frequência e amplitude definida pelo
índice de modulação, e com ondas portadoras triangulares de alta frequência. O índice de modulação
encontra-se compreendido entre 0 e 1. Esta técnica encontra-se descrita mais detalhadamente em [4]
e [5].
Neste tipo de modulação, a tensão de saída é positiva se a onda modulante é maior (em módulo) do
que a onda portadora e negativa se a onda modulante for menor (em módulo) que a onda portadora,
como se verifica na Figura 2.4.
Os semicondutores do conversor são comandados tendo em conta que quando o sinal de comando
do disparo é positivo, o semicondutor entra em condução. Os sinais de disparo dos semicondutores
11
superiores de cada braço devem estar desfasados de 120º entre cada um, enquanto que os sinais de
disparo dos semicondutores inferiores de cada braço devem ser complementares dos sinais dos
semicondutores superiores.
Como os tempos de entrada em condução dos semicondutores são normalmente inferiores aos
tempos de entrada ao corte, é necessário introduzir os tempos mortos entre os sinais de disparo dos
semicondutores superiores e inferiores, para prevenir eventuais curto-circuitos [5].
Anteriormente, esta técnica era aplicada através da utilização de um circuito analógico, que era muito
complexo e difícil de implementar. Actualmente, e com o grande avanço tecnológico na área de
controlo de sistemas de potência, a geração dos sinais PWM passaram a ser de origem digital. Isto
traz inúmeras vantagens, entre as quais a capacidade da frequência da onda portadora ser muito
superior, o que melhora bastante as formas de onda que se desejam obter. Para além disso, como
não usam circuito analógico, não estão sujeitos ao ruído adjacente a estes sinais.
A implementação digital do PWM permite maior flexibilidade na implementação de um sistema de
controlo de um conversor, devido à simplificação da sua implementação.
12
Capítulo 3
Controlo do Conversor
3 Controlo do Conversor
Neste capítulo encontra-se uma descrição geral do sistema de controlo do inversor de tensão
trifásico, a partir do modelo descrito no capítulo anterior. O controlo do conversor é assegurado pelo
controlo da tensão aos terminais do condensador e pelo controlo interno das correntes de saída do
inversor. No final do capítulo é feita uma descrição detalhada da simulação deste sistema de controlo
do inversor de tensão trifásico, realizada em ambiente MATLAB/SIMULINK.
13
3.1 Controlo Interno da Corrente
Com o modelo do conversor e o PWM já definidos, é possível agora discutir o controlo de corrente do
inversor de tensão trifásico. Como foi dito anteriormente, o disparo dos semicondutores do inversor é
comandado através do sistema de controlo das correntes de saída do inversor. Existem vários
métodos para controlar estas correntes. Porém, apenas um dos métodos será descrito em pormenor
neste capítulo.
As várias técnicas existentes para controlar as correntes do inversor podem ser agrupadas em dois
grupos principais. O primeiro grupo engloba todos os métodos de controlo de corrente que operam
num referencial estacionário (referencial difásico αβ), enquanto que o segundo grupo inclui técnicas
de controlo de corrente cujos controladores operam num referencial girante (referencial difásico dq).
O controlo de corrente num referencial estacionário é tipicamente implementado analogicamente.
Uma das técnicas mais utilizadas consiste no controlo de corrente que inclui um comparador de
histerese, que compara a corrente de saída do conversor com a corrente de referência decidindo
assim qual o dispositivo a colocar em condução. A grande desvantagem deste tipo de controlo está
relacionada com a frequência de comutação do inversor ser variável, num dado período da tensão de
saída. Assim, podem ocorrer alguns desvios de amplitude e de fase da tensão de saída, sendo
necessário por isso a introdução de um compensador. O compensador mais usual é o compensador
PI (Proporcional-Integral).
No caso do controlo de máquinas eléctricas, quando estas operam a velocidades baixas, a força
electromotriz é baixa, o que permite uma melhor compensação do erro entre o valor de referência da
corrente com o valor actual. Por outro lado, quando as máquinas eléctricas funcionam a velocidades
altas, o erro entre o valor de referência da corrente com o valor actual é superior e, portanto mais
difícil de compensar. Este problema pode ser resolvido através da utilização do controlo de corrente
num referencial girante.
O controlo de corrente num referencial girante é o mais adequado para ser uma implementação
digital. O principal objectivo deste tipo de controlo consiste no facto de que este tipo de controladores,
constituídos por compensadores do tipo PI, processa sinais contínuos. O controlador proposto para o
sistema de controlo do inversor existente no laboratório será então deste tipo. As saídas do
controlador de corrente serão as tensões de entrada do modulador SPWM, que gera os seis sinais de
disparo dos semicondutores do inversor de tensão. Mais uma vez, este tipo de controlo, juntamente
com o SPWM, constitui a solução mais frequente para implementação digital de um sistema de
controlo de um inversor de tensão trifásico.
Os compensadores podem ser de vários tipos, cada um deles específico para cada situação. Um
compensador só com ganho Proporcional (P) não garante erro estático nulo. O compensador
Proporcional (P) faz com que o controlador produza uma resposta em função do erro, ou seja, à
14
medida que o erro aumenta, o ganho Proporcional (P) também aumenta para que a correcção seja
possível. O efeito do ganho Proporcional diminui quando o erro se aproxima do zero, para o qual não
converge. O resultado é o aparecimento de um pequeno erro estático. Além disso, para ganhos
elevados pode originar instabilidade. Por outro lado, um compensador só com acção Integral (I)
origina um sistema com uma resposta lenta, pois aumenta o tempo de estabelecimento, apesar de
eliminar o erro estático ao introduzir um pólo na origem da função de transferência do controlador.
Quando se adiciona um compensador com acção derivativa (D) a um compensador do tipo
Proporcional, o controlador torna-se muito sensível a variações do erro. Apesar de adicionar
amortecimento ao sistema, melhorando a estabilidade, o compensador Proporcional-Derivativo (PD)
acentua o ruído de alta frequência, o que pode provocar variações excessivas no período do PWM.
Devido a esse facto, muitos controladores não possuem acção derivativa [6].
Considerando estes aspectos, o ideal consiste em escolher um compensador que seja eficiente e de
implementação simples. Assim, o compensador Proporcional-Integral (PI) constitui a melhor solução,
pois e adequado para sistemas com alterações de carga frequentes.
O sistema de controlo das correntes de saída do inversor de tensão encontra-se esquematizado na
Figura 3.1. Este sistema é constituído por duas cadeias de controlo interno da corrente. Na
transformação de Park e na transformação inversa de Park, os valores do
e do
são obtidos
a partir das tensões de saída do inversor [7], através da utilização das equações (2.19) e (2.20).
Udc
id*
+ -
PI
ud
uα
dq
ua
αβ
ub
iq
uq
*
+ -
αβ
PI
uβ
abc
PWM
uc
sinθ cosθ
id
iα
dq
ia
αβ
ib
iq
αβ
iβ
abc
ic
sinθ cosθ
Rede
Figura 3.1. Esquema de implementação do sistema de controlo interno da corrente do inversor de
tensão.
15
3.1.1 Síntese da cadeia de controlo interno da corrente
Para controlar as correntes de saída do inversor de tensão trifásico é necessário recorrer ao seu
modelo, descrito em 2.1. Analisando a Figura 2.1, as tensões de saída do inversor são dadas por
.
(3.1)
A implementação mais simples do sistema de controlo de corrente consiste em considerar o inversor
de tensão a funcionar com frequência fixa e com as correntes controladas no referencial girante
difásico dq, associado às tensões da rede. Para isso, é necessário aplicar as devidas transformações
de variáveis às tensões em (3.1). Aplicando as transformações de Clarke e de Park vem
(3.2)
.
(3.3)
Com o objectivo de melhorar a performance dos controladores, tipicamente introduzem-se sistemas
de desacoplamento, como se verifica em (3.3). Resolvendo as equações em (3.3) em ordem a
e
, resulta
(3.4)
.
Sabendo que a constante de tempo
(3.5)
, as equações (3.4) e (3.5) ficam
(3.6)
.
(3.7)
De acordo com as equações (3.6) e (3.7) é possível representar sob a forma de um diagrama de
blocos o sistema de controlo das correntes de saída do inversor. O diagrama de blocos encontra-se
representado na Figura 3.2. O diagrama de blocos encontra-se dividido em duas partes: uma parte
que representa o controlador PI, representado com o nome CONTROLLER, e uma segunda parte
que representa o modelo do sistema a controlar, denominada PLANT.
16
ed
id
*
ud
C(s)
+
+
-
1
+ +
R(1+sτ)
ωL
ωL
ωL
ωL
iq*
uq
+
C(s)
+ -
-
+
-
1
+ -
R(1+sτ)
id
iq
eq
CONTROLLER
PLANT
Figura 3.2. Diagrama de blocos do sistema com controlador de corrente.
Nas equações (3.6) e (3.7) verifica-se que existe um acoplamento entre as componentes d e q da
corrente do conversor. Porém, este acoplamento pode afectar o desempenho do controlador. Por isso
é necessário que seja feito o desacoplamento dessas componentes para o controlo das correntes.
Este desacoplamento entre as duas malhas de controlo encontra-se representado na parte do
controlador (CONTROLLER) da Figura 3.2. Anulando o acoplamento entre as componentes d e q das
correntes através da introdução do circuito de desacoplamento, o diagrama de blocos do sistema com
controlador de corrente é simplificado para o diagrama de blocos da Figura 3.3.
ed
id
*
ud
+
C(s)
iq*
+
C(s)
id
R(1+sτ)
uq
+ -
1
1
+ -
iq
R(1+sτ)
eq
Figura 3.3. Diagrama de blocos simplificado sem o acoplamento entre as componentes d e q da
corrente.
17
3.1.2 Determinação dos parâmetros do controlador PI
A implementação do controlador para este sistema é simples. Nesta secção encontram-se
demonstrados os vários passos de cálculo e opções tomadas na determinação dos parâmetros do
controlador PI. A função de transferência do controlador PI é dada por
.
(3.8)
Os valores dos ganhos proporcional e integral na expressão (3.8) determinam-se a partir de
(3.9)
.
Para determinar o valor das constantes
e
(3.10)
é necessário considerar que a síntese do controlador
PI deve ser realizada de modo a compensar a constante de tempo , ou seja, colocando o zero do PI
sobre o pólo do filtro. Para isso, é necessário considerar
.
Desta forma, e desprezando as perturbações
e
(3.11)
, o diagrama de blocos da Figura 3.3 pode ainda
ser simplificado, de acordo com os diagramas de blocos que se encontram representados na Figura
3.4 e na Figura 3.5.
id*
+
iq*
1 + sTn
sTi
1 + sTn
+ -
ud
1
id
R(1+sτ)
uq
sTi
1
iq
R(1+sτ)
Figura 3.4. Diagrama de blocos simplificado de acordo com o descrito em 3.1.2.
18
id*
id
+
G(s)
iq*
iq
+ -
G(s)
Figura 3.5. Diagrama de blocos simplificado cuja função de transferência representada permite o
dimensionamento dos parâmetros do controlador PI.
Sabendo que a resposta em cadeia fechada do diagrama de blocos da Figura 3.5 é dada por
.
(3.12)
Assim, o controlador é dimensionado de modo a se obter uma frequência de corte, em função de
,
dada por
.
Logo, a constante
(3.13)
pode-se determinar a partir da frequência de corte, ou seja
.
(3.14)
Os parâmetros do controlador PI serão então
(3.15)
.
(3.16)
Através de (3.15) e (3.16) verifica-se que estes dois parâmetros dependem dos parâmetros da rede
(R e L). O parâmetro L tem de ser dimensionado criteriosamente pois uma baixa indutância poderá
levar a um aumento de corrente significativo. Por outro lado, um valor elevado da indutância diminuirá
o valor da corrente mas diminui a capacidade de operação do inversor.
Para se obter uma protecção contra curto-circuitos, os valores de referência das correntes são
limitados a determinados valores.
A queda de tensão máxima na bobine é controlada pela tensão contínua armazenada no
condensador. Assim, uma corrente elevada requer não só uma elevada tensão contínua armazenada
no condensador mas também um valor da indutância não muito baixo.
19
Para a determinação do parâmetro L óptimo utiliza-se a expressão [9]
.
Na expressão (3.17)
do inversor e
(3.17)
corresponde à tensão no condensador,
corresponde à tensão de saída
corresponde à corrente que circula na bobine à saída do inversor.
3.2 Controlo da Tensão
Para que o sistema de controlo do inversor fique completo é necessário controlar a tensão da fonte
contínua, ou seja, a tensão do condensador
. O objectivo do controlo de tensão é alterar os
valores de referência das correntes da cadeia de controlo interno da corrente, mencionadas na
secção 3.1. Trata-se de um sistema de dupla realimentação e o esquema de implementação da
Figura 3.1 é alterado para o esquema representado na Figura 3.6 [10].
Udc
i d*
Udc*
PI
+ -
+ -
PI
ud
uα
dq
ua
αβ
ub
iq
uq
*
+ -
αβ
PI
uβ
abc
PWM
uc
sinθ cosθ
id
iα
dq
ia
αβ
ib
iq
αβ
iβ
abc
ic
sinθ cosθ
Rede
Figura 3.6. Esquema de implementação do sistema de controlo de tensão com controlo interno da
corrente.
O sistema de controlo representado na Figura 3.6 é constituído por duas cadeias de controlo das
correntes de saída do inversor e por uma cadeia de controlo da tensão do condensador, que
estabelece a corrente de referência segundo o eixo d. A componente segundo o eixo q pode ser
usada para controlar a potência reactiva trocada entre o inversor e a rede, enquanto que a
20
componente segundo o eixo d controla a potência activa. Usualmente, a corrente de referência
segundo o eixo q considera-se nula, o que permite maximizar o factor de potência.
Este controlo vai permitir que as correntes do lado alternado tenham a capacidade de seguir as
correntes de referência impostas pelo controlo da tensão no condensador.
3.2.1 Síntese da cadeia de controlo da tensão
A escolha do compensador é mais uma vez importante. A utilização de compensadores dos tipos
Proporcional (P) e Proporcional-Derivativo (PD) não garantem erro estático nulo e, logo não são
apropriados. Para dimensionar os parâmetros do controlo de tensão é necessário aplicar um
compensador Proporcional-Integral (PI), pois este garante erro estático nulo e é apropriado para este
tipo de sistemas [5].
O erro entre o valor de referência da tensão do condensador e o valor actual é determinado e
aplicado ao compensador PI, que estabelece o valor de referência da componente d da corrente.
A Figura 3.7 apresenta as correntes no circuito de tensão contínua que auxiliam o sistema de controlo
da tensão contínua aos terminais do condensador.
Icarga
Idc
Ic
R
L
R
L
R
L
Udc
Rede
Figura 3.7. Esquema simplificado do sistema a controlar.
Um dos principais objectivos do sistema de controlo do conversor consiste em controlar a potência
activa e a potência reactiva de saída do conversor. Desta forma, as componentes segundo o eixo d
da tensão e da corrente do referencial girante difásico controlarão a potência activa entregue à rede,
enquanto que as componentes segundo o eixo q controlarão a potência reactiva. As potências activa
e reactiva podem então ser dadas por
(3.18)
.
(3.19)
Considerando que se pretende maximizar o factor de potência, a potência reactiva é imposta nula.
Como a potência do conversor se considera constante, a potência aos terminais do condensador será
igual à potência activa, ou seja
21
.
(3.20)
Por sua vez, através da análise da Figura 3.7, a corrente do lado contínuo do condensador
corresponde a
.
(3.21)
Substituindo a equação (3.21) em (3.20), a equação (3.18) pode ser alterada para
.
(3.22)
Além disso, a corrente que passa no condensador é dada por
.
(3.23)
O diagrama de blocos do controlo da tensão no condensador encontra-se representado na Figura 3.8.
Analisando o diagrama de blocos da Figura 3.8 constata-se que é possível controlar a tensão no
condensador a partir da corrente
.
A resposta da cadeia de controlo interno da corrente pode ser representada pela função de
transferência com um atraso de
da Figura 3.8.
Icarga
Udc*
id
+ -
C(s)
*
id
1
Udc
ed
1+sTp
Idc
+
Ic
1
Udc
sC
Figura 3.8. Diagrama de blocos do controlo da tensão no condensador.
3.2.2 Determinação dos parâmetros do controlador PI
O sistema de controlo de tensão é constituído por um compensador PI. Este compensador deve ser
dimensionado de maneira a que o sistema em cadeia fechada se mantenha estável e que tenha uma
boa resposta para a eliminação de possíveis perturbações.
A função de transferência do compensador existente na Figura 3.8 será do mesmo tipo da função de
transferência em (3.8). Com o objectivo do sistema de controlo ter uma resposta rápida a uma
perturbação, os ganhos proporcional e integral para o controlador, devem ser dados pelas equações
(3.24)
22
.
(3.25)
As equações (3.24) e (3.25) são obtidas através do critério de simetria, que corresponde ao melhor
método para eliminar eventuais perturbações externas, que no caso em estudo estão relacionadas
com a corrente que circula na carga.
Tal como no controlo interno da corrente são introduzidos os limitadores, para limitar a corrente de
curto-circuito do conversor e para que o conversor nunca gere correntes acima do valor nominal da
corrente.
3.3 Simulação do Sistema de Controlo do Conversor
Nesta secção encontram-se expostos os procedimentos envolvidos na simulação do sistema de
controlo do conversor, utilizando o ambiente MATLAB/SIMULINK como ferramenta de trabalho.
Inicialmente é feita uma análise detalhada dos blocos constituintes do modelo para o sistema
considerado, baseada nas características da cadeia de controlo interno de corrente e da cadeia de
controlo da tensão do condensador, definidas em 3.1 e em 3.2, respectivamente.
As diversas simulações do sistema de controlo permitem o dimensionamento correcto e adequado
dos parâmetros do sistema. É esse um dos objectivos principais das simulações. Estes parâmetros
podem ser depois implementados no microprocessador.
Por fim, os resultados das simulações vão permitir que seja possível efectuar uma comparação
destes resultados simulados com os resultados obtidos experimentalmente no laboratório.
3.3.1 Modelo de simulação
O modelo de simulação considerado contempla o controlo da potência activa e da potência reactiva
através do controlo da tensão aos terminais do condensador.
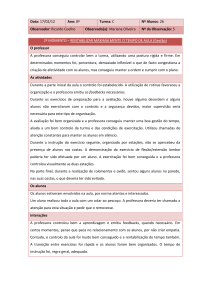
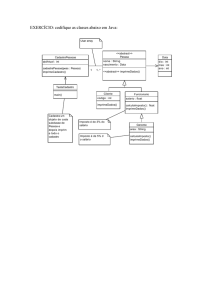
Na Figura 3.9 apresenta-se o esquema geral do modelo utilizado para a simulação do sistema de
controlo de tensão com controlo interno de corrente, realizado em MATLAB/SIMULINK. Na parte
inferior da Figura 3.9 encontra-se o sistema de potência, constituído pelo condensador, o conversor e
a rede trifásica, e na parte superior da
Figura 3.9 encontra-se o sistema de controlo a ser
implementado digitalmente no microprocessador, onde se incluem os controladores PI e o SVPWM,
responsáveis pelo comando dos semicondutores do inversor de tensão.
23
Figura 3.9. Modelo utilizado para a simulação do sistema de controlo de tensão com controlo interno
de corrente.
Os blocos da parte inferior da Figura 3.9 correspondem ao sistema de potência que se pretende
controlar, de acordo com o esquema da Figura 3.7. O bloco “Universal Bridge” corresponde ao
inversor de tensão trifásico constituído por IGBT’s comandados através do SVPWM. A rede trifásica
de 400 V de tensão composta a 50 Hz encontra-se representada pelo bloco “Three-Phase Source”.
Para completar o esquema, a fonte de tensão contínua é representada pelo condensador C. Os
parâmetros destes blocos estão definidos no ponto 3.3.2.
Na parte superior está implementado o sistema de controlo de acordo com a Figura 3.6. O bloco
“Discrete PI Controller” corresponde ao compensador PI do controlo de tensão discutido em 3.2. Este
compensador PI apresenta os limitadores descritos anteriormente.
O bloco “Current PI Controller” simula a cadeia de controlo interno de corrente, como se encontra
descrito no diagrama de blocos da Figura 3.2. Este bloco está representado na Figura 3.10.
Neste bloco são aplicadas as devidas transformações às correntes e às tensões trifásicas,
nomeadamente as transformações de Clarke e de Park, bem como as respectivas transformações
inversas, descritas em 2.1.1 e em 2.1.2, de acordo com a Figura 3.6. O bloco “PI Controller” simula o
controlador da Figura 3.2, e encontra-se representado na Figura 3.11, onde é possível verificar a
introdução do desacoplamento.
24
Figura 3.10. Bloco “Current PI Controller”.
Figura 3.11. Bloco “PI Controller”.
O bloco “SVPWM” corresponde ao bloco que gere os seis sinais de comando necessários para
disparar os semicondutores do inversor trifásico. Este bloco está representado na Figura 3.12.
25
Figura 3.12. Bloco “SVPWM”.
3.3.2 Parâmetros de simulação
Os parâmetros utilizados para as simulações do sistema de controlo do conversor encontram-se na
Tabela 3.1.
Tabela 3.1. Parâmetros utilizados para as simulações.
Descrição
Parâmetros
Valores
Unidades
4700
μF
C
Condensador do lado DC do sistema
R
Parâmetro da rede
0,1
Ω
L
Parâmetro da rede
15
mH
4000
Hz
0,00025
s
5
ms
fPWM
Frequência do PWM
TS
Período de comutação dos semicondutores
TP
Tempo de resposta do sistema de controlo de corrente
Kpi
Ganho proporcional do controlador de corrente
81,6
Kii
Ganho integral do controlador de corrente
314
Kpu
Ganho proporcional do controlador de tensão
0,3
Kiu
Ganho integral do controlador de tensão
34,4
26
3.3.3 Análise de resultados
Para o teste do sistema de controlo descrito anteriormente realizaram-se duas simulações. A primeira
simulação consistiu em realizar uma variação de escalão na tensão de referência do condensador.
De seguida analisaram-se as formas de onda para este aumento da tensão no condensador de 1000
V iniciais para 1100 V, aos 10 ms. Nas figuras 3.13 e 3.14 encontram-se, respectivamente, as
respostas no tempo da tensão no condensador e das correntes nas 3 fases da rede.
Figura 3.13. Variação da tensão do condensador para uma entrada em escalão na tensão de
referência do condensador aos 10 ms.
Figura 3.14. Resposta das correntes nas 3 fases para uma entrada em escalão na tensão de
referência do condensador aos 10 ms.
27
As figuras 3.15 e 3.16 apresentam as respostas no tempo das componentes d e q do sistema,
respectivamente, para um aumento da tensão no condensador. Como se verifica, uma variação na
tensão do condensador apenas influencia a componente d da corrente. Desta forma, as duas
componentes encontram-se desacopladas. Para além disso, verifica-se que o tempo de resposta é de
cerca de 30 ms.
Figura 3.15. Resposta da corrente
para uma entrada em escalão na tensão de referência do
condensador aos 10 ms.
Figura 3.16. Resposta da corrente
para uma entrada em escalão na tensão de referência do
condensador aos 10 ms.
28
A segunda simulação consistiu em introduzir, para além do primeiro escalão, um outro escalão aos 30
ms, na componente q da corrente. As respostas no tempo encontram-se nas figuras 3.17, 3.18, 3.19
e 3.20.
Figura 3.17. Variação da tensão do condensador para uma entrada em escalão na tensão de
referência do condensador aos 10 ms e na corrente
aos 30 ms.
Figura 3.18. Resposta das correntes nas 3 fases para uma entrada em escalão na tensão de
referência do condensador aos 10 ms e na corrente
29
aos 30 ms.
Figura 3.19. Resposta da corrente
para uma entrada em escalão na tensão de referência do
condensador aos 10 ms e na corrente
Figura 3.20. Resposta da corrente
aos 30 ms.
para uma entrada em escalão na tensão de referência do
condensador aos 10 ms e na corrente
aos 30 ms.
Mais uma vez se verifica o desacoplamento das duas componentes da corrente, pois uma variação
na componente q da corrente não influencia a resposta da componente d da corrente. Para além
disso, é possível verificar a rápida resposta da cadeia de controlo interno da corrente, que para uma
variação na componente q da corrente, o tempo de resposta é de cerca de 5 ms.
30
Capítulo 4
Implementação do Sistema
4 Implementação do Sistema
Neste capítulo encontra-se a descrição detalhada do sistema de controlo do conversor implementado
no microprocessador, bem como das características dos diversos equipamentos indispensáveis para
a realização do sistema de controlo.
Inicialmente descreve-se o equipamento utilizado e no fim do capítulo, auxiliado por um fluxograma,
são explicadas as funções e rotinas utilizadas que se encontram nos ficheiros que implementam o
sistema de controlo.
31
4.1 Descrição Geral do Sistema
O sistema a implementar no laboratório para controlar o inversor trifásico de tensão a partir da tensão
aos terminais do condensador e das correntes de saída do inversor é constituído pelo seguinte
equipamento auxiliar:
Placa de Aquisição de Sinal (PAS);
Processador Digital de Sinais (DSP).
A Placa de Aquisição de Sinal é responsável por adquirir os sinais de tensão e de corrente
necessários ao sistema de controlo. Os sinais são adquiridos através da utilização de sensores de
corrente e de tensão, que transformam estes sinais em tensões compreendidas entre certos valores,
permitindo assim a entrada destes sinais analógicos no DSP para serem processados. Para que seja
possível realizar o sistema de controlo de corrente proposto basta apenas ler as correntes em duas
das fases, bem como apenas duas tensões de saída do conversor. Por outro lado, para o controlo da
tensão aos terminais do condensador é necessário que a Placa de Aquisição de Sinal possua mais
um sensor de tensão para a leitura desta tensão.
O Processador Digital de Sinais vai receber então as duas correntes, as duas tensões das fases e a
tensão aos terminais do condensador lidas nos sensores e vai gerar os seis sinais de comando do
disparo dos semicondutores do conversor. O processador vai possuir software capaz de realizar o
controlo da tensão aos terminais do condensador assim como do controlo das correntes de saída do
inversor.
A metodologia utilizada para a implementação deste sistema completo corresponde à realização dos
ensaios seguintes:
Ensaio em cadeia aberta;
Ensaio em cadeia fechada da cadeia de controlo da corrente;
Ensaio em cadeia fechada da cadeia de controlo da tensão com controlo interno de corrente.
O ensaio em cadeia aberta tem como principal objectivo a calibração dos parâmetros do controlador
PI do controlo de corrente, bem como dos valores das correntes de referência a serem convertidos
para o formato lido pelo microprocessador. O esquema de implementação deste ensaio no laboratório
encontra-se representado na Figura 4.1. Neste ensaio são lidas as grandezas indicadas na Figura
4.1.
O ensaio em cadeia fechada realiza o controlo de corrente dimensionado no microprocessador, com
os valores já configurados no ensaio em cadeia aberta. Este ensaio encontra-se representado no
esquema de implementação da Figura 4.2.
Por fim, o ensaio em cadeia fechada do controlo de tensão permite controlar a tensão aos terminais
do condensador para o valor de referência pretendido. Para tal é necessário realizar a configuração
32
da Figura 4.3, para a implementação do sistema de controlo da tensão do condensador com controlo
interno de corrente. Este ensaio corresponde à implementação completa do sistema de controlo
proposto para o inversor trifásico e nele são lidas as grandezas indicadas na figura correspondente.
Rectificador
Inversor
L
R
Udc
Rede
6 sinais PWM
DSP
va
ia
vb
PAS
ib
Figura 4.1. Esquema de implementação do ensaio em cadeia aberta do sistema no laboratório.
Rede
Rectificador
Inversor
L
R
Udc
6 sinais PWM
DSP
va
ia
vb
PAS
ib
Figura 4.2. Esquema de implementação do ensaio em cadeia fechada do sistema de controlo da
corrente no laboratório.
33
Inversor
L
R
Udc
Rede
6 sinais PWM
DSP
ia
ib
va
vb
Udc
PAS
Figura 4.3. Esquema de implementação do ensaio em cadeia fechada do sistema de controlo da
tensão no laboratório.
Por razões relacionadas com a alimentação do microprocessador, este é ligado a uma placa
denominada Placa do DSP, cuja função consiste em alimentar o processador e fazer a interligação do
DSP com os módulos de disparo do inversor.
O conversor utilizado no laboratório para este trabalho, que vai ser descrito detalhadamente na
secção seguinte, contém um rectificador que ligado à rede gera uma tensão contínua que irá estar
disponível aos terminais do condensador.
De maneira a garantir a segurança do ensaio em cadeia fechada do sistema de controlo da tensão
coloca-se uma carga com uma determinada resistência para impedir que a corrente no condensador
aumente muito rapidamente, em caso de o sistema se tornar instável.
As bobines L existentes no laboratório e que se encontram representadas nas figuras anteriores têm
o valor de 15 mH. A resistência R tem um valor muito baixo, e para os cálculos de dimensionamento
considerou-se um valor de resistência na ordem de 1 Ω.
34
4.2 Características do Equipamento
4.2.1 Inversor de tensão
O módulo do conversor existente no laboratório a ser controlado pelo sistema proposto neste trabalho
é constituído por três equipamentos principais:
O inversor trifásico de 3 braços com os módulos de disparo incluídos;
Quatro condensadores de 4700 μF;
Rectificador para carregar o condensador a partir de uma fonte de corrente alternada.
O inversor de tensão contém os 6 semicondutores (do tipo IGBT) dispostos por 3 braços de potência,
como referido no Capítulo 2. O disparo destes é efectuado por 3 módulos de disparo existentes na
estrutura do módulo do conversor, que possuem a capacidade para comandar o disparo dos
semicondutores superiores e dos semicondutores inferiores, através do método PWM. Estes seis
sinais de disparo PWM são provenientes da Placa do DSP, que irá ser explicada nos pontos
seguintes.
Os quatro condensadores de 4700 μF encontram-se dispostos da seguinte forma: 2 em série em
paralelo com outros 2 também em série. Cada condensador consegue suportar até um valor de
tensão de 450 V. Com a configuração referida anteriormente, a tensão contínua
máxima que o
conjunto dos condensadores, constituído pelos 4 condensadores, consegue suportar no total é de
800 V.
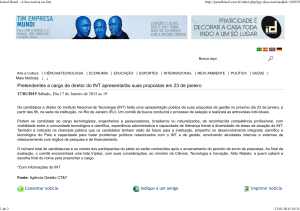
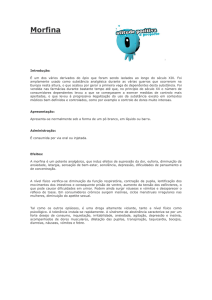
O módulo do conversor utilizado neste trabalho que contém todo o equipamento necessário para o
funcionamento do sistema de controlo do inversor de tensão corresponde ao modelo do fabricante
SEMIKRON como se encontra representado na Figura 4.4.
Condensador
Módulo de disparo
Rectificador
Figura 4.4. Módulo do conversor utilizado no laboratório do fabricante SEMIKRON.
35
Nas montagens da Figura 4.1 e da Figura 4.2 o condensador C, que corresponde ao condensador
equivalente da configuração referida anteriormente, é carregado através do rectificador existente no
módulo do conversor que se encontra alimentado por uma tensão alternada do secundário do
autotransformador ligado à rede, que regula o valor da tensão que se encontra disponível aos
terminais do condensador. Para a montagem do sistema de controlo de tensão, o rectificador deixa
de estar em funcionamento e o funcionamento do conversor fica controlado pelo sistema de controlo
completo proposto.
As características mais importantes do módulo do conversor e dos seus constituintes encontram-se
resumidos na Tabela 4.1.
Tabela 4.1. Características principais do módulo do conversor do fabricante SEMIKRON.
Símbolo
Descrição
Valor
Unidade
50
A
380
V
Tensão contínua máxima suportada no condensador
800
V
Frequência de comutação máxima
10
kHz
4700
μF
98
%
Corrente eficaz
Tensão alternada de entrada para o rectificador que carrega o
condensador
Capacidade do condensador equivalente
Rendimento do conversor
O módulo de disparo que se encontra na estrutura do conversor é o que se encontra na Figura 4.5. O
esquemático deste módulo, onde se encontram representados os conectores que irão ser ligados à
Placa do DSP, corresponde ao esquemático que se apresenta na Figura 4.6.
Os 14 conectores que se podem ver do lado esquerdo da Figura 4.6 vão ser ligados através de um
cabo para a Placa do DSP. Cada conector vai-se encontrar ligado a um determinado ponto,
dependendo do tipo de conector. Certos conectores têm a função de alimentar o módulo de disparo
enquanto que outros conectores têm a função de fornecer os sinais de disparo aos IGBT dos
semicondutores. Cada braço de potência terá o seu módulo de disparo. As funções atribuídas a cada
conector encontram-se descritas na Tabela 4.2.
36
Figura 4.5. Módulo de disparo de um braço de potência do conversor utilizado no laboratório.
Figura 4.6. Esquemático do módulo de disparo de um braço de potência do conversor.
37
Tabela 4.2. Função de cada conector do módulo de disparo.
Conector (CN1)
Símbolo
CN1:1
CN1:2
Tensão [V]
Não conectado
BOT
CN1:3
CN1:4
Descrição
Sinal de disparo do IGBT inferior
[0;5]
Não conectado
TOP
Sinal de disparo do IGBT superior
[0;5]
CN1:5
Não conectado
CN1:6
Não conectado
CN1:7
Não conectado
CN1:8
Tensão de alimentação do módulo
15
CN1:9
Tensão de alimentação do módulo
15
CN1:10
GND
Terra
0
CN1:11
GND
Terra
0
CN1:12
Não conectado
CN1:13
Não conectado
CN1:14
Não conectado
4.2.2 Processador Digital de Sinais (DSP)
O microprocessador utilizado para a realização do sistema de controlo proposto neste trabalho é do
fabricante MICROCHIP. No microprocessador irá ser implementado o software necessário para que o
inversor de tensão produza os sinais de tensão e de corrente desejados e que a potência activa e a
potência reactiva sejam controladas a partir da tensão aos terminais do condensador. O software será
desenvolvido com o auxílio da ferramenta MPLAB IDE, específica para o desenvolvimento de
software de microprocessadores do fabricante MICROCHIP.
O microprocessador da MICROCHIP utilizado foi o dsPIC30F4011 [11]. Este microprocessador é
adequado para o controlo de máquinas eléctricas e de conversores de potência, pois tem a
capacidade de gerar até 6 sinais PWM no máximo e possui 8 entradas analógicas. Para este trabalho
satisfaz os requisitos propostos referidos nas secções anteriores.
38
As características principais que o microprocessador possui e que são fundamentais para que o
sistema de controlo funcione são as seguintes:
Processador com linguagem de 16 bits;
Contadores de 16 bits internos (TIMER);
9 portas para o conversor analógico-digital (ADC, ou seja, Analog-to-Digital Converter) de 10
bits existente dentro do microprocessador [12];
Possibilidade de amostragem a uma taxa de 1 Msps;
6 canais de saída do PWM, com os modos complementares já incluídos [13].
As instruções realizadas pelo processador são baseadas em palavras de 16 bits. Os contadores
internos são importantes para o funcionamento tanto dos conversores analógico-digitais como da
geração dos sinais PWM.
O conversor analógico-digital converte sinais analógicos em sinais digitais que podem ser
interpretados pelo microprocessador como variáveis armazenadas em memória, e logo com a
possibilidade de serem manipuladas com um dado objectivo. O sinal digital resultante desta
conversão apresenta 10 bits. Como as instruções do microprocessador são de 16 bits, terão que ser
adicionados 6 bits indiferentes (0 ou 1) à palavra de saída do módulo ADC para perfazer o total de 16
bits. Esta particularidade é feita automaticamente na conversão de um sinal analógico para um sinal
digital.
O microprocessador possui um módulo que gera os 6 sinais de PWM, com os modos
complementares já incluídos, e com o tempo morto entre os sinais definido pelo utilizador também já
incluído. Possui 3 geradores de factor de ciclo e pode estar sincronizado com a amostragem do
módulo que possui o conversor analógico-digital. A frequência do PWM é também deifinida pelo
utilizador no software.
O esquema das portas do microprocessador utilizado encontra-se representado na Figura 4.7, onde é
possível ver as portas de entrada para os sinais analógicos do lado esquerdo, designadas na Figura
4.7 como ANx, em que x representa um número entre 0 e 9, bem como as saídas do PWM do lado
direito.
39
Figura 4.7. Esquema do microprocessador dsPIC30F4011 do fabricante MICROCHIP utilizado para
realizar o controlo do inversor de tensão.
Relativamente a questões eléctricas, o microprocessador necessita de ser alimentado. A tensão de
alimentação é de 5 V de tensão contínua. As portas assinaladas pelas simbologias MCLR (1), PGD
(25) e PGC (26) são fundamentais para o funcionamento do microprocessador. É através destas
portas que se pode programar o microprocessador com o software desenvolvido.
As gamas de tensões a que estão sujeitas as portas do microprocessador utilizadas neste trabalho
encontram-se resumidas na Tabela 4.3.
Tabela 4.3. Valores de tensão admissíveis pelo microprocessador nas portas utilizadas.
Portas
Tensão [V]
ANx
[0;5]
PWMxL
[0;5]
PWMxH
[0;5]
VDD
5
VSS
0
AVDD
5
AVSS
0
40
4.2.3 Placa de Aquisição de Sinal
Para que o sistema de controlo proposto neste trabalho seja realizado é necessário a leitura de duas
fases das correntes de saída do inversor, de duas tensões compostas e da tensão contínua
armazenada no condensador, tal como se encontra indicado na Figura 4.3.
A leitura destes valores é feita através de sensores que transformam valores de tensão e de
correntes elevados em valores possíveis de serem manipulados pelo microprocessador que contém o
software do sistema de controlo, ou seja, dentro da gama de tensões apresentada na Tabela 4.3.
Relativamente aos sensores de tensão, estes são do modelo LV 25-P da LEM. Para o seu
funcionamento necessitam de alimentação contínua de +15 V e de -15 V. Desta forma, foi necessário
a utilização de um transformador de 230/+15/-15 V e dos respectivos componentes para a fonte de
tensão contínua, constituída por um rectificador, condensadores e reguladores das tensões. As
entradas dos sensores de tensão são as tensões compostas. Como se tratam de valores elevados de
tensões e correntes, estes têm de ser limitados às correntes de entrada dos sensores, através de
uma resistência correctamente dimensionada. As saídas dos sensores são sinais transformados
dentro dos sensores correspondentes a correntes, e por isso coloca-se em cada saída uma
resistência, definida nas características dos sensores, para se obter um sinal de tensão. Este sinal
sinusoidal de tensão não tem componente contínua. Contudo é necessário ajustar este sinal em torno
de 0 V para que seja possível a entrada nas portas dos conversores analógico-digitais do
microprocessador que só toleram tensões entre 0 e 5 V. Dessa forma, é necessário condicionar o
sinal de saída dos sensores às tensões de entrada do microprocessador. Este circuito encontra-se
explicado no Anexo A.
Os sensores de corrente têm um funcionamento mais simples, não necessitando de electrónica
adicional. Os sensores utilizados são do modelo LTSR 25-NP da LEM. A alimentação é de 5 V de
tensão contínua e de 0 V. Mais uma vez foi necessário um transformador de 230/5 V e os respectivos
componentes para a existência de uma fonte contínua. Este tipo de sensores tem a particularidade de
os valores das correntes serem medidas através do efeito de Hall. O sinal de corrente à saída é uma
reprodução da corrente sinusoidal que se pretende medir, com uma componente contínua de 2,5 V.
Os valores de pico desta corrente à saída do sensor não ultrapassam a gama de tensões admitida
pelo microprocessador. Assim, não necessitam de electrónica adicional.
O projecto da placa, as opções tomadas e o dimensionamento dos componentes de electrónica
necessários para o correcto funcionamento dos sensores encontra-se descrito no Anexo A. A placa
com os componentes todos montados no laboratório encontra-se na fotografia da Figura 4.8.
41
Figura 4.8. Placa de Aquisição de Sinal utilizada no laboratório com os componentes montados.
Todas as considerações e opções tomadas no dimensionamento e no projecto da Placa de Aquisição
de Sinal encontram-se, como já foi referido atrás, no Anexo A. Destas considerações fazem parte o
dimensionamento correcto das resistências de entrada e de saída dos sensores de tensão, bem
como do circuito condicionador de sinal à saída dos sensores de tensão.
4.2.4 Placa do DSP
Devido aos requisitos para a alimentação do microprocessador apresentados na Tabela 4.3 foi
necessário realizar uma placa de suporte para o microprocessador. A necessidade desta placa não
se prende só pela alimentação mas também na comunicação entre o microprocessador e o módulo
de disparo do inversor, através dos conectores apresentados na Tabela 4.2. Estes conectores ligamse à Placa do DSP através de um cabo. A Placa do DSP contém também 14 conectores iguais aos
do módulo de disparo, de onde são enviados para o inversor os sinais de disparo dos semicondutores
gerados pelo sistema de controlo programado no microprocessador.
Na Figura 4.9 está representado o circuito da Placa do DSP, montado no laboratório. O circuito
projectado foi desenhado num programa que projecta uma placa de circuito impresso, designado por
KiCad, e o seu projecto encontra-se descrito no Anexo B.
42
Figura 4.9. Circuito da Placa do DSP montado no laboratório.
A régua com 12 entradas que se encontra na parte superior da placa faz a interligação entre a Placa
de Aquisição de Sinal e a Placa do DSP. As entradas da régua existente na placa tem a configuração
da Figura 4.10. As 3 primeiras entradas são de alimentação do microprocessador e dos módulos de
disparo do inversor, os quais se encontram ligados a esta placa através de cabos. Estes cabos ligamse aos conectores existentes no lado direito da Placa do DSP, de acordo com a Tabela 4.2.
5V
0V
15 V AN8
AN7
AN6
AN5
AN4
AN3
AN2
AN1
AN0
Figura 4.10. Régua com as entradas necessárias para a interligação entre a Placa de Aquisição de
Sinal e a Placa do DSP.
O software desenvolvido no computador, para ser programado no microprocessador, necessita de
passar primeiro por um circuito que faz a compilação antes de ser transferido para a memória interna
do microprocessador. Este circuito é designado por MPLAB ICD2.
A placa dispõe de um conector para cabos do tipo RJ11. Este cabo faz a comunicação entre o
MPLAB ICD2 e a Placa do DSP. A programação e a compilação do software do sistema de controlo
43
do inversor no microprocessador são feitas através das portas MCLR, PGC e PGD do
microprocessador. Estes sinais que são gerados no MPLAB ICD2 serão transferidos para o conector
para cabos do tipo RJ11 e, mais tarde, para as referentes portas do microprocessador. O conector
para cabos do tipo RJ11 tem as pistas de acordo com a configuração do cabo da Figura 4.11.
1 – MCLR
2 – VDD
3 – VSS
4 – PGD
5 – PGC
6 – NC
6
1
Figura 4.11. Configuração do cabo que interliga o MPLAB ICD2 e a Placa do DSP.
O espaço deixado para os condensadores na placa permite a colocação de condensadores nas
pistas das fontes para a filtragem de eventuais ruídos nos sinais de alimentação importantes para o
funcionamento correcto dos diversos componentes.
4.3 Configuração do Sistema
4.3.1 Esquema de montagem
O sistema montado no laboratório tem a configuração da Figura 4.12. Para as leituras das correntes e
das tensões são efectuadas ligações para a Placa de Aquisição de Sinal. Aqui, as correntes e as
tensões são transformadas em sinais analógicos entre 0 V e 5 V. Estes sinais analógicos são
transferidos para a Placa do DSP, onde são manipulados para a obtenção dos sinais de disparo dos
semicondutores do inversor através do sistema de controlo proposto neste trabalho.
O código gerado no computador é programado no microprocessador através do MPLAB ICD2, que
assegura que nenhum erro aconteça durante a compilação do software no microprocessador.
Da Placa do DSP saem os sinais de disparo dos semicondutores do inversor através de cabos que
ligam aos circuitos de disparo de cada braço do inversor.
44
Conversor
Rede
Carga
Placa do
DSP
Computador
PAS
Figura 4.12. Esquema de montagem no laboratório.
4.4 Descrição do Software
4.4.1 Ficheiro adc.c
Neste ficheiro está presente a função que configura as portas analógico-digitais do microprocessador.
As portas analógico-digitais são configuradas para receber os 5 sinais pretendidos: 2 de corrente, 2
de tensões compostas e 1 da tensão no condensador. A amostragem dos sinais foi configurada para
que seja realizada de forma sequencial, porta a porta. O contador que controla a amostragem está
interligado com o módulo PWM e com a sua frequência.
Os dados de saída das portas analógicas são armazenados em variáveis de 16 bits, no formato Q.15
(em inglês também conhecido como formato Signed Fractional). Ou seja, os dados de saída das
portas analógico-digitais são apresentados da seguinte forma: sddd dddd dd00 0000. O s representa
o sinal da variável, positivo ou negativo, enquanto o d representa os dados de saída que podem ser 1
ou 0. O protótipo da função é o seguinte:
void ADC_init( void ).
45
4.4.2 Ficheiro medidas.s
Este ficheiro apresenta uma função importante. Como já foi referido anteriormente, os sinais que
saem dos sensores apresentam uma componente contínua, para permitir a sua entrada no
microprocessador, de acordo com as gamas de tensões admissíveis nas portas analógico-digitais.
Desta forma, esta função presente neste ficheiro irá funcionar como um filtro da componente contínua
das grandezas medidas nos sensores.
Para anular a componente contínua utilizou-se um algoritmo baseado no método de Euler. Através de
.
Na expressão dada em (4.1),
(4.1)
corresponde ao valor médio de um sinal
. É este valor que tirá que
ser subtraído ao sinal de entrada deste filtro. Após manipulação algébrica chega-se à expressão que
determina a anulação da componente contínua dos sinais de entrada, dada por
.
Para a próxima iteração
, o passo de cálculo
é dado por (4.3) e
.
(4.2)
.
(4.3)
O protótipo da função que anula a componente contínua é o seguinte:
medidas().
4.4.3 Ficheiro multiply.c
Este ficheiro apresenta apenas uma função auxiliar para todo o programa desenvolvido, que auxilia a
multiplicação de duas variáveis no formato Q.15, devolvendo o produto desses números. O protótipo
da função é o seguinte:
int multiply( int a, int b ).
4.4.4 Ficheiro transf.c
Para a realização do sistema de controlo é necessário que as variáveis num sistema trifásico sejam
transformadas num sistema difásico, que permite uma melhor manipulação algébrica dos sinais a
controlar.
46
A função que realiza a Transformação de Clarke dos sinais de corrente e de tensão, de acordo com a
expressão em (2.16), tem o protótipo seguinte:
void abc_alfabeta( int ia, int ib, int vab, int vbc ).
A função que realiza a Transformação de Park das correntes transformadas através da
Transformação de Clarke, de acordo com a expressão em (2.18), tem o protótipo seguinte:
void alfabeta_dq( int ialfa, int ibeta, int valfa, int vbeta ).
As variáveis necessitam das transformações inversas de Clarke e de Park para que o módulo do
PWM entre em funcionamento. A função que realiza a Transformação Inversa de Park, de acordo
com a expressão (2.21) tem o protótipo seguinte:
void dq_alfabeta( int ud, int uq, int sen, int cosen ).
Por fim, a função que realiza a Transformação Inversa de Clarke, de acordo com (2.17) tem o
protótipo seguinte:
void alfabeta_abc( int ualfa, int ubeta ).
4.4.5 Ficheiro PI.c
Neste ficheiro apresentam-se as funções necessárias para a realização do controlador PI para a
cadeia de controlo da corrente e o controlador PI para a cadeia de controlo da tensão no
condensador.
Ambas as funções são baseadas no mesmo algoritmo para realizar o controlo proporcional e integral.
Este algoritmo é baseado na Figura 4.13.
47
T
e
+ -
Kp.e +Ki e
Figura 4.13. Esquema de implementação do controlador PI.
Através da análise da Figura 4.13 verifica-se
(4.4)
(4.5)
.
(4.6)
.
(4.7)
Assim,
O protótipo da função que realiza o controlador PI da cadeia de controlo da corrente é o seguinte:
void pi_control( int Id, int Iq, int Id_ref, int Iq_ref ).
Por outro lado, o protótipo da função que realiza o controlador PI da cadeia de controlo da tensão aos
terminais do condensador é o seguinte:
void voltage_pi_control( int Udc, int Udc_ref ).
4.4.6 Ficheiro PWM.c
Uma das funções principais para o funcionamento correcto deste sistema de controlo proposto
encontra-se neste ficheiro. Esta função realiza a modulação de largura de impulso (PWM) a partir das
tensões controladas, no caso do sistema em cadeia fechada. Esta função apresenta a configuração
necessária dos registos para configurar as portas de saída do microprocessador. O protótipo da
função é o seguinte:
void InitPWM( void ).
48
Este módulo foi configurado para funcionar a uma frequência de comutação dos semicondutores do
inversor de 2 kHz. O tempo morto entre os sinais de disparo foi configurado para cerca de 1 μs.
4.4.7 Ficheiro main.c
Neste ficheiro encontra-se a função principal para que seja possível correr o sistema de controlo
proposto neste trabalho no microprocessador. Esta função apresenta a chamada a todas as rotinas
necessárias à configuração do microprocessador, bem como das rotinas necessárias para controlar o
inversor de tensão, através do sistema implementado. O protótipo desta função é o seguinte:
int main( void ).
4.4.8 Fluxograma do sistema
O programa realizado no MPLAB IDE para o controlo do inversor deve em primeiro lugar gerar um
Interrupt e ler as correntes em duas das fases, bem como duas tensões compostas, nos canais dos
conversores analógico-digitais (A/D), que converteram estas correntes e tensões para valores em
formato digital para poderem ser manipulados algebricamente e tratados como variáveis do nosso
sistema.
Após esta leitura, as componentes contínuas são retiradas. A tensão do condensador vai ser
comparada com a tensão de referência do condensador. O erro gerado é multiplicado por um ganho
proporcional e integrado pela componente integral, ambos constituintes do controlador de tensão.
Após a acção do controlador PI da tensão, a corrente de referência
é determinada.
As transformações de Clarke e de Park entram em funcionamento e transformam as correntes lidas e
as tensões, sem as componentes contínuas, num sistema com referencial difásico a partir de um
sistema trifásico.
A partir do momento em que as correntes
e
se encontram determinadas, a malha de controlo de
corrente entra em funcionamento. As tensões que irão entrar no módulo do PWM do
microprocessador são criadas. Estas tensões criadas encontram-se num referencial difásico.
Como à entrada do módulo do PWM é necessário se ter as tensões trifásicas, as transformações
inversas de Park e de Clarke terão que ser realizadas, para que se volte a ter um sistema num
referencial trifásico.
A partir deste momento, os factores de ciclo do PWM são actualizados, de acordo com os novos
valores de tensão obtidos à entrada deste. Estas tensões irão ser comparadas com uma onda
triangular e os sinais de disparo são gerados. Na Figura 4.14 encontra-se representado o fluxograma
que resume o sistema implementado.
49
A/D Interrupt
Leitura das tensões e correntes
Filtrar componente contínua
dos sinais
Acção do controlador PI da
tensão
Transformações de Clarke e de
Park para as correntes
Acção do controlador PI da
corrente
Transformações Inversas de
Park e de Clarke
Actualização do factor de ciclo
do PWM
Fim do Interrupt
Figura 4.14. Fluxograma do programa que efectua o sistema de controlo.
50
Capítulo 5
Resultados
5 Resultados
Após a descrição das características dos equipamentos a serem utilizados, neste capítulo encontrase uma apresentação dos resultados obtidos em cadeia aberta e em cadeia fechada do sistema de
controlo do conversor.
51
5.1 Cadeia Aberta
A montagem no laboratório do ensaio em cadeia aberta foi feita de acordo com o esquema de
implementação da Figura 4.1. Este ensaio permite a configuração dos parâmetros a serem utilizados
posteriormente no sistema de controlo da corrente, em cadeia fechada.
Com o auxílio do autotransformador, aumentou-se a tensão contínua nos terminais do condensador,
, obtida a partir da ponte de rectificação existente no conversor do laboratório, descrito
anteriomente. Este aumento realizou-se até se obterem correntes de saída do conversor na ordem
dos 5 A e na ordem dos 10 A. Estas correntes obtidas, que constituem um sistema trifásico
equilibrado, podem se verificar facilmente na Figura 5.1 e na Figura 5.2.
Figura 5.1. Correntes de saída (fases a e b) do inversor trifásico com amplitude de 5 A (escala de
10mV/A).
52
Figura 5.2. Correntes de saída (fases a e b) do inversor trifásico com amplitude de 10 A (escala de
100mV/A).
O objectivo deste ensaio consiste em determinar os valores obtidos no microprocessador (em formato
Q.15) das correntes com valores de 5 A e de 10 A, para que possam ser usados no ensaio em cadeia
fechada do controlo de corrente, como valores de referência para a corrente. Assim, para os valores
de corrente ditos anteriormente, os valores obtidos no microprocessador encontram-se descritos na
Tabela 5.1. Para o estudo em questão considerou-se 1 p.u. correspondente ao valor de 10 A de
corrente à saída do conversor.
Tabela 5.1. Valores de corrente obtidos no microprocessador.
Corrente [A]
Valores por unidade [p.u.]
Decimal
Hexadecimal
5
0,5
1100
0x044C
10
1,0
2200
0x0898
Neste ensaio também foi possível se obter as ondas de tensão obtidas após a conversão e a
aplicação do PWM. As tensões compostas à saída do conversor que se visualizaram no osciloscópio
encontram-se na Figura 5.3 e na Figura 5.4.
53
Figura 5.3. Tensões compostas à saída do conversor.
Figura 5.4. Tensões compostas à saída do conversor.
A componente alternada existente na Figura 5.3 e na Figura 5.4 é imposta pelo aparelho de medida
existente no laboratório. As tensões compostas deveriam se encontrar em torno do valor médio zero
constante.
No microprocessador foi também possível obterem-se as formas de onda das tensões e das
correntes resultantes das transformações de variáveis, tais como, as transformações de Clarke e de
Park. Estas formas de onda foram obtidas através da amostragem de 100 pontos. Sabendo que a
frequência da rede é de 50 Hz, e fazendo com que o período destas ondas correspondesse a 20 ms,
considerou-se para a determinação gráfica que 16 pontos equivalem aproximadamente a 20 ms.
Na Figura 5.5 estão representadas as formas de onda da tensão
e da corrente
em valores por
unidade, sabendo que 1 p.u. para a tensão corresponde a 400 V e que 1 p.u. para a corrente
corresponde a 10 A. Neste caso, o ensaio foi realizado para uma corrente de 5 A.
54
1
Vα [pu]
0,75
Iα [pu]
0,5
0,25
0
0
0,01
0,02
0,03
0,04
0,05
0,06
-0,25
-0,5
-0,75
-1
t [s]
Figura 5.5. Formas de onda da tensão
e da corrente
em valores por unidade, para um ensaio
com uma corrente de saída de 5 A.
Através da função que realiza a Transformação de Park, a partir da qual se obtêm as correntes
e
, foi possível obterem-se as representações gráficas destas correntes, em valores por unidade, para
uma corrente de 5 A nas fases de saída do inversor. Na Figura 5.6 é possível observar a
representação gráfica das componentes resultantes da Transformação de Park, onde se verifica o
sistema difásico.
1
id [pu]
iq [pu]
0,8
0,6
0,4
0,2
0
0
0,01
0,02
0,03
0,04
0,05
0,06
-0,2
-0,4
t [s]
Figura 5.6. Representação das correntes
e
, em valores por unidade, para um ensaio com uma
corrente de saída de 5 A.
55
Da mesma forma, realizou-se um outro ensaio para uma corrente de 10 A. Os resultados
representados na Figura 5.5 e na Figura 5.6 são semelhantes. Na Figura 5.7 e na Figura 5.8
encontram-se os resultados obtidos para um ensaio com uma corrente de saída de 10 A, onde se
verifica a alteração apenas da amplitude das formas de onda das correntes.
1,5
Vα [pu]
Iα [pu]
1
0,5
0
0
0,01
0,02
0,03
0,04
0,05
0,06
-0,5
-1
-1,5
t [s]
Figura 5.7. Formas de onda da tensão
e da corrente
, em valores por unidade, para um ensaio
com uma corrente de saída de 10 A.
1
id [pu]
0,8
iq [pu]
0,6
0,4
0,2
0
0
0,01
0,02
0,03
0,04
0,05
0,06
-0,2
-0,4
-0,6
t [s]
Figura 5.8. Representação das correntes
e
, em valores por unidade, para um ensaio com uma
corrente de saída de 10 A.
56
Através da análise da Figura 5.7 constata-se que a tensão e a corrente não se encontram em fase. A
corrente está em atraso em relação à tensão pois a carga utilizada no ensaio é muito indutiva. Este
facto é possível verificar na Figura 5.8, pois a corrente
não tem um valor nulo.
Comparando a Figura 5.1 com a Figura 5.5 seria se esperar que as formas de onda das correntes
tivessem a mesma forma. Na Figura 5.5 não se visualiza a oscilação da comutação da corrente
devida à conversão, como se verifica na Figura 5.1, pois a amostragem dos conversores analógicodigitais é mais lenta que a frequência a que a conversão é efectuada, devido ao facto da amostragem
dos pontos ser feita apenas para determinados pontos dentro de um intervalo definido no
microprocessador. O mesmo se verifica na Figura 5.2 e na Figura 5.7.
5.2 Controlo da Corrente
5.2.1 Ensaio em cadeia fechada
Para o ensaio do sistema de controlo interno da corrente em cadeia fechada é necessário a ligação à
rede da saída do inversor. Esta ligação é também realizada com o auxílio de um autotransformador.
O esquema de implementação deste sistema é o representado na Figura 4.2.
Uma vez determinados os valores de referência das correntes a partir do ensaio em cadeia aberta, o
controlo do conversor é possível ser realizado. O ensaio em cadeia fechada realizado consistiu em
analisar, para o valor de corrente de 5 A, a influência da alteração dos parâmetros do controlador
Proporcional-Integral (PI). Desta forma, foram realizados vários ensaios para vários valores de
mantendo-se o mesmo valor de
,
.
Os primeiros ensaios tiveram como objectivo a obtenção das respostas do sistema de controlo de
corrente do inversor, quando o sistema entrava em funcionamento. Para uma corrente de referência
de 5 A (
e
), obteve-se a resposta das correntes para dois valores de
podem visualizar na Figura 5.9 e na Figura 5.10.
57
, que se
Figura 5.9. Resposta no tempo das correntes (
e
e para
Figura 5.10. Resposta no tempo das correntes (
e
e
) do sistema para uma corrente de referência
(escala de 100 mV/A).
e
e para
) do sistema para uma corrente de referência
(escala de 100 mV/A).
No microprocessador também foram registados os valores da tensão
os valores das correntes
e
e da corrente
, bem como
. Os gráficos da Figura 5.11 e da Figura 5.12 representam as formas
de onda da amostragem efectuada pelo microprocessador, das grandezas referidas anteriormente,
para uma corrente de 5 A e um valor de
. Mais uma vez se chama a atenção para o facto
de 1 p.u. corresponder a 10 A para a corrente e a 400 V para a tensão.
58
1
Vα [pu]
0,8
Iα [pu]
0,6
0,4
0,2
0
-0,2 0
0,01
0,02
0,03
0,04
0,05
0,06
-0,4
-0,6
-0,8
-1
t [s]
Figura 5.11. Formas de onda da tensão
e da corrente
, em valores por unidade, para um ensaio
com uma corrente de saída de 5 A e um valor de
.
1
id [pu]
iq [pu]
0,8
0,6
0,4
0,2
0
0
0,01
0,02
-0,2
0,03
0,04
0,05
0,06
t [s]
Figura 5.12. Representação das correntes
e
, em valores por unidade, para um ensaio com uma
corrente de saída de 5 A e um valor de
.
Na Figura 5.11 verifica-se que as tensões e as correntes controladas encontram-se em fase, como
seria de esperar, ao contrário do que se apresenta nas formas de onda do ensaio em cadeia aberta,
visto que no ensaio em cadeia aberta não há controlo. No ensaio em cadeia fechada existe a
possibilidade de controlo da amplitude e da fase das correntes e das tensões.
Mais uma vez seria de esperar que as formas de onda das correntes da Figura 5.11, apresentassem
o ruído proveniente da comutação dos semicondutores do inversor, como acontece nas formas de
59
onda da Figura 5.9 e da Figura 5.10. Este facto é explicado pelo facto da amostragem dos
conversores analógico-digitais do microprocessador ser mais lenta que a frequência de comutação
dos semicondutores do inversor.
Para além destes ensaios, foram realizados mais dois ensaios mas agora para uma corrente de
referência de 10 A. Estes ensaios consistiram em analisar a influência da alteração da corrente de
referência entre as correntes
e
, para um dado valor de
O primeiro ensaio, para as correntes de referência
.
e
, registaram-se no osciloscópio
a resposta do sistema de controlo de corrente, através das formas de onda das correntes
e
, que
se encontram na Figura 5.13.
Figura 5.13. Resposta no tempo das correntes (
e
e
e para
) do sistema para uma corrente de referência
(escala de 10 mV/A).
Alterando agora os valores de referência das correntes, de tal forma que
resposta no tempo do sistema de controlo da corrente encontra-se na Figura 5.14.
60
e
, a
Figura 5.14. Resposta no tempo das correntes (
e
e
e para
) do sistema para uma corrente de referência
(escala de 10 mV/A).
Através da análise da Figura 5.13 e da Figura 5.14 pode-se verificar que a resposta do sistema é
rápida, na ordem dos 50 ms, e a sobrelevação não é muito elevada.
Um dos aspectos importantes do controlo interno de corrente consiste em verificar o desacoplamento
entre as duas componentes d e q, aquando de uma variação apenas numa das componentes.
Para tal foram realizados mais três ensaios. Na Figura 5.15 encontram-se representadas as formas
de onda das correntes nas 3 fases e a resposta do sistema quando se varia o
mantém o
de 0 para 10 A e se
igual a 0.
Figura 5.15. Formas de onda das correntes nas 3 fases para uma variação de
mantém
(escala de 10mV/A).
61
de 0 para 10 A e se
Na Figura 5.16 encontram-se representadas as respostas das correntes
e
. Em conjunto com a
figura anterior, verifica-se que o tempo de resposta do sistema a esta variação é de cerca 50 ms.
1,5
id [pu]
1,3
iq [pu]
1,1
0,9
0,7
0,5
0,3
0,1
-0,1
0
0,05
0,1
0,15
0,2
0,25
-0,3
-0,5
t [s]
Figura 5.16. Representação das correntes
e
, em valores por unidade, para uma variação de
de 0 para 10 A e se mantém
.
Através da análise da Figura 5.16 pode-se verificar que as duas componentes se encontram
desacopladas, cumprindo assim os requisitos propostos para o sistema de controlo. Para uma
variação na componente d da corrente, a componente da corrente segundo o eixo q não sofre
variação.
Num novo ensaio pretendeu-se verificar, agora, a resposta do sistema quando a corrente
0 para 10 A e se mantém o
varia de
igual a 0. A Figura 5.17 apresenta a resposta a esta variação. Na
Figura 5.18 encontram-se representadas as respostas das correntes
62
e
.
Figura 5.17. Formas de onda das correntes nas 3 fases para uma variação de
mantém
de 0 para 10 A e se
(escala de 10mV/A).
1,5
id [pu]
1,3
iq [pu]
1,1
0,9
0,7
0,5
0,3
0,1
-0,1
0
0,05
0,1
0,15
0,2
0,25
-0,3
-0,5
t [s]
Figura 5.18. Representação das correntes
e
, em valores por unidade, para uma variação de
de 0 para 10 A e se mantém
.
Mais uma vez, através da análise da Figura 5.18 verifica-se que as correntes se encontram
desacopladas, não existindo nenhuma influência entre as duas componentes para esta variação
ensaiada.
Por fim, na Figura 5.19 estão representadas, apenas para confirmação do desacoplamento, as
correntes
e
, para uma variação da corrente
de 0 para -10 A. De referir que, a corrente
mantém inalterada e nula.
63
se
0,5
id [pu]
0,3
iq [pu]
0,1
-0,1
0
0,05
0,1
0,15
0,2
0,25
-0,3
-0,5
-0,7
-0,9
-1,1
-1,3
-1,5
t [s]
Figura 5.19. Representação das correntes
e
, em valores por unidade, para uma variação de
de 0 para -10 A e se mantém
64
.
5.3 Controlo da Tensão no Condensador
5.3.1 Ensaio da cadeia de controlo da tensão
O ensaio realizado para o controlo da tensão no condensador consistiu em fazer variar a tensão de
referência do condensador de 250 V para 350 V. Esta cadeia de controlo irá gerar uma corrente
de
referência, a qual irá gerar uma resposta no controlador PI da cadeia de controlo interno da corrente.
O sistema terá uma resposta e, dessa forma, registou-se também a resposta no tempo da corrente
.
Num primeiro ensaio, verificou-se a resposta do sistema para uma subida da tensão do condensador
de 250 V para 350 V. Num segundo ensaio, verificou-se a resposta do sistema a uma descida da
tensão do condensador de 350 V para 250 V.
5.3.2 Subida da tensão de referência
Neste ensaio, a resposta do sistema encontra-se representada na Figura 5.20. Os parâmetros do
controlador PI da tensão utilizados correspondem a:
e
.
Figura 5.20. Formas de onda da tensão (a amarelo), da corrente (a roxo) numa das fases e da tensão
no condensador (a azul) para um aumento de tensão no condensador de 250 V para 350 V.
Através da análise da Figura 5.20 verifica-se que a corrente (a roxo) e a tensão (a amarelo) numa das
fases se encontram em oposição de fase, pois quando a tensão de referência no condensador
aumenta, o sistema reage fazendo com que a potência circule da rede para o condensador.
Para analisar o tempo de resposta do sistema a este aumento, na Figura 5.21 pode-se verificar que o
sistema demora cerca de 100 ms a responder ao escalão de entrada de 250 V para 350 V. A corrente
65
numa das fases encontra-se a roxo enquanto que a tensão no condensador encontra-se
representada a azul.
Figura 5.21. Resposta da corrente (a roxo) e da tensão no condensador (a azul) para uma variação
de 250 V para 350 V na tensão do condensador.
A resposta no tempo da corrente
tem a representação que se apresenta na Figura 5.22.
0,5
id [pu]
0,3
0,1
-0,1
0
0,05
0,1
0,15
0,2
0,25
-0,3
-0,5
-0,7
-0,9
-1,1
-1,3
-1,5
t [s]
Figura 5.22. Resposta no tempo da corrente
para uma variação de tensão no condensador de 250
V para 350 V.
A resposta do controlador de tensão a esta variação, representada na Figura 5.22, é de cerca de 100
66
ms. O sistema de controlo da tensão apenas apresenta a influência do controlador proporcional. Não
se considerou o controlo integral, o que pode não garantir erro estático nulo.
Como se verifica na Figura 5.22, após a variação da tensão de referência do condensador de 250 V
para 350 V, a corrente
tem uma resposta de cerca de 100 ms e o errro estático não é nulo. O
ganho proporcional influencia o tempo de resposta mas como não existe ganho integral, o erro
estático de posição não é nulo. Porém, verifica-se que é inferior a 10%.
5.3.3 Descida da tensão de referência
Para o ensaio da descida da tensão de referência de 250 V para 350 V utilizaram-se os mesmos
parâmetros do controlador PI. A resposta obtida foi a resposta representada na Figura 5.23.
Figura 5.23. Formas de onda da tensão (a amarelo), da corrente (a roxo) numa das fases e da tensão
no condensador (a azul) para uma diminuição da tensão no condensador de 250 V para 350 V.
Desta vez, a corrente (a roxo) e a tensão (a amarelo) numa das fases encontram-se em fase, pois a
potência circula no sentido do condensador para a rede para uma descida de tensão no condensador,
ficando em fase com a tensão da rede.
A resposta do sistema a esta descida encontra-se representada na Figura 5.24, onde se mostram
apenas as formas de onda da corrente (a roxo) e da tensão no condensador (a azul). Mais uma vez
se verifica que a resposta do sistema se encontra perto dos 100 ms.
67
Figura 5.24. Resposta da corrente (a roxo) e da tensão no condensador (a azul) para uma variação
de 250 V para 350 V na tensão do condensador.
68
Capítulo 6
Conclusões
6 Conclusões
Neste capítulo encontram-se descritas sumariamente as conclusões e os aspectos que as verificam,
bem como a definição de possíveis trabalhos futuros que possam vir a ser desenvolvidos neste
âmbito.
69
O objectivo da presente dissertação consistia em estudar a implementação no laboratório de um
sistema de controlo de um inversor trifásico de tensão, controlado por um DSP, que contém software
para a realização do controlo de tensão com cadeia de controlo interno de corrente. Para tal, foram
utilizados controladores do tipo PI para implementar os controladores do sistema de controlo de
tensão no condensador com a cadeia de controlo interno de corrente.
Os algoritmos de controlo propostos foram implementados no microprocessador. O sistema
respondeu adequadamente, pois verificaram-se as correntes sinusoidais trifásicas à saída, com a
amplitude pretendida e com a frequência síncrona da rede.
Para o estudo da influência do sistema de controlo foram realizados 3 tipos de ensaios: um ensaio em
cadeia aberta, um ensaio em cadeia fechada apenas para a cadeia de controlo interno de corrente e
um ensaio para a caidea de controlo da tensão no condensador.
Através do ensaio em cadeia aberta pode-se concluir que os sinais de comando PWM estavam a
funcionar correctamente pois as formas de onda da tensão e da corrente tinham a amplitude
desejada e a frequência de 50 Hz.
No ensaio em cadeia fechada para a cadeia de controlo interno de corrente conclui-se que o sistema
de desacoplamento entre as componentes d e q das correntes estava a funcionar correctamente,
pois, como se verifica nos resultados, quando uma das componentes das correntes sofria um
escalão, a outra permanecia com o valor inicial, sem alteração. A resposta do sistema está
relacionada com o dimensionamento dos parâmetros do controlador PI, e neste ensaio encontrou-se
a melhor resposta possível do sistema de controlo de corrente.
No ensaio em cadeia fechada do controlo da tensão aos terminais do condensador, o sistema
funcionou correctamente e teve uma resposta estável. Porém não foi a resposta rápida desejada, pois
apenas se utilizou o ganho proporcional e considerou-se nulo o ganho integral do controlador PI do
sistema de controlo da tensão. Além disso, como não se considerou o ganho integral, o erro estático
não foi nulo para a tensão no condensador, porém foi inferior a 10%, o que traduz uma boa resposta
do sistema a um aumento ou diminuição do valor da tensão de referência.
Pode-se concluir então que a potência activa e reactiva entregue à rede não estão interligadas
quando existe uma variação nas correntes e nas tensões, pois o desacoplamento entre as
componentes d e q das correntes é verificado.
Estes resultados estão em concordância com os resultados de simulação obtidos anteriormente à
implementação do sistema de controlo.
Para o aperfeiçoamento do sistema, futuramente pode ser feito um sistema de controlo que considere
o ganho integral e que utilize para realizar os sinais de comando dos semicondutores, uma nova
modulação. Neste trabalho apenas se utilizou PWM que compara as ondas sinusoidais com a
triangular. Dessa forma, não foi implementado o SVPWM. Um estudo das harmónicas também pode
ser realizado por forma a melhorar o sistema.
70
Anexo A
Projecto da Placa de Aquisição
de Sinal
Projecto da Placa de Aquisição de Sinal
Neste anexo encontram-se as principais opções tomadas no projecto da Placa de Aquisição de Sinal,
que contém os sensores de tensão e de corrente necessários para a realização do sistema de
controlo.
71
A.1 Sensores de Corrente
A Placa de Aquisição de Sinal foi projectada no ambiente KiCad e o seu circuito encontra-se
representado na Figura A.1. Através deste circuito é possível realizar a impressão numa placa de
circuito impresso, para que possa ser utilizada no sistema proposto neste trabalho.
Os sensores de corrente, que se encontram representados na parte inferior da Figura A.1, são
alimentados a partir da fonte de tensão de 5 V e também com 0 V. Quando as correntes medidas
através do efeito de Hall, as saídas dos sensores irão ter uma réplica do sinal de corrente lido,
adicionado de uma componente contínua no valor de 2,5 V.
De acordo com a folha de dados do sensor de corrente do Anexo D, a saída do sensor de corrente é
dada por
.
(A.1)
Apesar da saída do sensor de corrente ser um sinal de tensão, este tem de ser interpretado como um
sinal de corrente, no microprocessador.
Figura A.1. Circuito da Placa de Aquisição de Sinal projectado neste trabalho.
72
Nas figuras A.2 e A.3 encontram-se representados, respectivamente, o sensor utilizado e o esquema
de princípio do sensor de corrente.
Figura A.2. Sensor de corrente utilizado no laboratório.
Figura A.3. Esquema de princípio de funcionamento do sensor de corrente.
Neste trabalho apenas são necessários dois sensores de corrente para ler as correntes em duas
fases. Porém, reservou-se espaço para outros sensores de corrente, caso haja necessidade de num
trabalho futuro se ler outra corrente.
73
A.2 Sensores de Tensão
Os sensores de tensão, representados na parte superior da Figura A.1, são alimentados a partir da
fonte de tensão de +15 V e de -15 V.
O esquema de princípio de funcionamento do sensor encontra-se representado na Figura A.4.
Figura A.4. Esquema de princípio do sensor de tensão.
Como se verifica, é necessário dimensionar as resistências que se têm que colocar em dois terminais
dos sensores. Considerando que a tensão composta admissível para o trabalho se trata dos 400 V,
de valor eficaz, e considerando a corrente de entrada, indicada pelo fabricante do sensor, é de 10
mA, é necessário colocar uma resistência que satisfaça estes requisitos. A resistência vai ser dada
por
.
(A.2)
Por outro lado, a corrente de saída do sensor é de 25 mA. Nos dados do fabricante, a resistência que
se deve colocar à saída,
, deve ter valores entre 100 Ω e 190 Ω. Neste trabalho considerou-se
uma resistência no valor de 140 Ω.
Assim, a tensão de saída do sensor corresponderá a
.
(A.3)
Este sinal de saída será uma onda sinusoidal em torno de 0 V, e com amplitude, em valor eficaz de
3,5 V, o que corresponde a cerca de 4,95 V de amplitude, e de cerca de 10 V pico a pico. Desta
forma é necessário condicionar o sinal para que este seja lido nos canais analógico-digitais, que
apenas suportam tensões entre 0 V e 5 V. Para isso, a amplitude pico a pico tem de ser diminuída
para 5 V e o valor médio tem de subir para 2,5 V.
74
A.3 Circuito Condicionador de Sinal
O circuito utilizado para fazer subir o valor médio da tensão de saída de 0 V para 2,5 V, dos 3 sinais
de saída dos sensores de tensão, é o circuito representado na Figura A.5.
Rb
+15V
RZ
+15V
R1
Vi
-
Vo
+
R2
DZ
-15V
R3
Figura A.5. Circuito Condicionador de Sinal.
A função de transferência do circuito é dada por
.
(A.4)
Considerando uma amplitude de sinal máxima de 0 V a 4,75 V para os sinais a entrar no
microprocessador, a tensão de saída vai ser dada por
.
(A.5)
Através da análise da Figura A.5 e através de (A.5) verifica-se que
.
(A.6)
Sabendo que a primeira parcela de (A.4) está relacionada com a subida do valor médio, imposta pelo
díodo de Zener, então o díodo de Zener terá de ter a tensão dada por
.
(A.7)
Assim, no laboratório foi utilizado um díodo de Zener com a tensão de 5,6 V e potência de 1 W. Para
o dimensionamento de
, considerando uma corrente máxima de passagem no díodo de 20 mA,
deve-se verificar a relação
.
(A.8)
Os valores das restantes resistências tiveram em conta a relação em (A.6), bem como das resistência
existentes no laboratório. A Tabela A.1 apresenta os valores das resistências considerados.
75
Tabela A.1. Valores da resistências utilizados no projecto da PAS.
Resistências
Valor
Unidade
R1
50
kΩ
R2
27
kΩ
R3
12,1
kΩ
Rb
22,5
kΩ
RZ
560
Ω
76
Anexo B
Projecto da Placa do DSP
Projecto da Placa do DSP
Para o correcto funcionamento do microprocessador é necessário garantir os requisitos retratados no
Capítulo 4. Este anexo retrata o projecto da Placa do DSP para sua implementação numa placa de
circuito impresso.
77
B.1 Circuito da Placa do DSP
A Placa do DSP foi também projectada no ambiente KiCad e o seu circuito encontra-se representado
na Figura B.1. Através deste circuito é possível realizar a impressão numa placa de circuito impresso,
para que possa ser utilizada no sistema proposto neste trabalho. O microprocessador descrito no
Capítulo 4 ocupa a parte central da figura. No projecto deixou-se espaço reservado à integração de
condensadores, cuja função seria filtrar eventuais ruídos existentes na transição dos sinais de
alimentação e dos sinais de tensão e de corrente medidos.
Figura B.1. Circuito da Placa do DSP projectado neste trabalho.
78
Anexo C
Código do Sistema de Controlo
Código do Sistema de Controlo
Este anexo contém o código que foi utilizado para realizar o sistema de controlo do inversor proposto
neste trabalho.
79
C.1 Ficheiro adc.c
/*------------------------------------------------------------------------------------------------------------------------------------------| FILE: adc.c
| DESCRIPTION: Configuration bits for ADC
| DATE: 12/05/2009
-------------------------------------------------------------------------------------------------------------------------------------------*/
#include "p30f4011.h"
#include "dsp.h"
#include "math.h"
#include "libq.h"
#include "common.h"
void ADC_init ( void );
void TMR3_init ( void );
/*------------------------------------------------------------------------------------------------------------------------------------------| FUNCTION: ADC_init()
-------------------------------------------------------------------------------------------------------------------------------------------*/
void ADC_init( void )
{
ADCON1bits.FORM = 3;
//Data Output Format: 1.15
ADCON1bits.SSRC = 2;
//Sample Clock Source:2 - Timer3; 3 - PWM
ADCON1bits.ASAM = 1;
//Sampling begins immediately after conversion
ADCON1bits.SIMSAM = 1;
//Enable sequential channels sampling
ADCON2bits.SMPI = 8;
//8 conversions
ADCON2bits.CHPS = 0;
//Converts CH0
ADCON2bits.CSCNA = 1;
ADCON2bits.BUFM = 0;
//Buffer configured as one 16-word buffer
ADCON2bits.ALTS = 0;
//1 always use MUX A input multiplexer setting
ADCON3bits.ADRC = 0;
//ADC Clock is derived from Systems Clock
ADCON3bits.ADCS = 63;
//ADC Conversion Clock (32*Tcy)
80
ADCHS = 0;
ADCHSbits.CH0NA = 0;
// CH0 negative input is Vref-
ADCSSL = 0xFFFF;
ADPCFG = 0xFFFF;
ADPCFGbits.PCFG0 = 0;
ADPCFGbits.PCFG1 = 0;
ADPCFGbits.PCFG2 = 0;
ADPCFGbits.PCFG3 = 0;
ADPCFGbits.PCFG4 = 0;
ADPCFGbits.PCFG5 = 0;
ADPCFGbits.PCFG6 = 0;
ADPCFGbits.PCFG7 = 0;
IFS0bits.ADIF = 0;
//Clear the A/D interrupt flag bit
IEC0bits.ADIE = 1;
//Enable A/D interrupts
ADCON1bits.ADON = 1;
//Turn on the A/D converter
}
81
C.2 Ficheiro medidas.s
;
; file medidas.s
;
.global _medidas
.global medidas
_medidas:
medidas:
;remoção da componente contínua de Ia
mov.w _offsetHIa,W0
sub.w _ADCBUF0,WREG ; W0=ADC-offset
clr.w W1
btsc W0,#15
setm W1
mov.w W0,W5 ; Guarda in W5 (ADC-Offset)
mov.w _qKI,W4
mpy W4*W5,A
sac A,#-1,W4
mov.w W4,_Ia
add _offsetLIa
mov.w W1,W0
addc _offsetHIa
;;remoção da componente contínua de Ib
mov.w _offsetHIb,W0
sub.w _ADCBUF1,WREG ; W0=ADC-offset
clr.w W1
btsc W0,#15
setm W1
mov.w W0,W5 ; Guarda em W5 (ADC-Offset)
mov.w _qKI,W4
mpy W4*W5,A
sac A,#-1,W4
mov.w W4,_Ib
add _offsetLIb
mov.w W1,W0
addc _offsetHIb
82
;;remoção da componente contínua de Vab
mov.w _offsetHVab,W0
sub.w _ADCBUF2,WREG ; W0=ADC-offset
clr.w W1
btsc W0,#15
setm W1
mov.w W0,W5 ; Guarda em W5 (ADC-Offset)
mov.w _qKU,W4
mpy W4*W5,A
sac A,#-1,W4
mov.w W4,_Vab
add _offsetLVab
mov.w W1,W0
addc _offsetHVab
;remoção da componente contínua de Vbc
mov.w _offsetHVbc,W0
sub.w _ADCBUF3,WREG ; W0=ADC-offset
clr.w W1
btsc W0,#15
setm W1
mov.w W0,W5 ; Guarda em W5 (ADC-Offset)
mov.w _qKU,W4
mpy W4*W5,A
sac A,#-1,W4
mov.w W4,_Vbc
add _offsetLVbc
mov.w W1,W0
addc _offsetHVbc
return
.end
83
C.3 Ficheiro multiply.c
/*--------------------------------------------------------------------------------------------------------------------------------------| FILE: multiply.c
| DESCRIPTION: Multiply 2 numbers in Q.15
| DATE: 03/09/2009
------------------------------------------------------------------------------------------------------------------------------------------*/
#include "p30f4011.h"
#include "dsp.h"
#include "math.h"
#include "libq.h"
#include "common.h"
int multiply (int a, int b)
{
register int dsp_accA asm("A");
int result;
dsp_accA = __builtin_mpy(a, b, NULL, NULL, 0, NULL, NULL, 0);
result = __builtin_sac(dsp_accA, 0);
return result;
}
C.4 Ficheiro transf.c
/*----------------------------------------------------------------------------------------------------------------------------------------| FILE: transf.c
| DESCRIPTION: Contains all transformation functions
| DATE: 12/05/2009
----------------------------------------------------------------------------------------------------------------------------------------------*/
#include "p30f4011.h"
#include "dsp.h"
#include "math.h"
#include "libq.h"
84
#include "common.h"
/*--------------------------------------------------------------------------------------------------------------------------------------| FUNCTION: Clarke Transform
-----------------------------------------------------------------------------------------------------------------------------------------*/
volatile int ialfa = 0;
volatile int ibeta = 0;
volatile int valfa = 0;
volatile int vbeta = 0;
void abc_alfabeta (int ia, int ib, int vab, int vbc)
{
int sqrt3by2 = Q15(0.866);
int onebysqrt3 = Q15(1.0/sqrt(3));
ialfa = ia;
ibeta = (ia + 2*ib);
ibeta = multiply(ibeta, onebysqrt3);
valfa = vab + vbc/2;
vbeta = multiply(vbc, sqrt3by2);
return;
}
/*--------------------------------------------------------------------------------------------------------------------------------------| FUNCTION: Park Transform
----------------------------------------------------------------------------------------------------------------------------------------*/
volatile int sen = 0;
volatile int cosen = 0;
volatile int id = 0;
volatile int iq = 0;
void alfabeta_dq (int ialfa, int ibeta, int valfa, int vbeta)
{
int valfa2;
int vbeta2;
85
int raiz;
int id1;
int id2;
int iq1;
int iq2;
//sen = vbeta/(sqrt((valfa*valfa)+(vbeta*vbeta)));
//cosen = valfa/(sqrt((valfa*valfa)+(vbeta*vbeta)));
valfa2 = multiply(valfa, valfa);
vbeta2 = multiply(vbeta, vbeta);
raiz = valfa2 + vbeta2;
raiz = _Q15sqrt(raiz);
raiz = 2*raiz;
asm ("repeat #17\n\tdivf %1,%2" : "=a"(sen) : "r"(vbeta), "e"(raiz) : "w1");
//sen
asm ("repeat #17\n\tdivf %1,%2" : "=a"(cosen) : "r"(valfa), "e"(raiz) : "w1");
//cosen
//id = ialfa*cosen + ibeta*sen;
//iq = -ialfa*sen + ibeta*cosen;
id1 = multiply(ialfa, cosen);
id2 = multiply(ibeta, sen);
id = id1 + id2;
id = 2*id;
iq1 = multiply(ialfa, sen);
iq2 = multiply(ibeta, cosen);
iq = -iq1 + iq2;
iq = 2*iq;
return;
}
/*------------------------------------------------------------------------------------------------------------------------------------------| FUNCTION: Inverse Park Transform
--------------------------------------------------------------------------------------------------------------------------------------------*/
volatile int ualfa = 0;
volatile int ubeta = 0;
86
void dq_alfabeta (int ud, int uq, int sen, int cosen)
{
int ua1;
int ua2;
int ub1;
int ub2;
ua1 = multiply(ud, cosen);
ua2 = multiply(uq, sen);
ualfa = ua1 - ua2;
ub1 = multiply(ud, sen);
ub2 = multiply(uq, cosen);
ubeta = ub1 + ub2;
return;
}
/*-------------------------------------------------------------------------------------------------------------------------------------------| FUNCTION: Inverse Clarke Transform
-----------------------------------------------------------------------------------------------------------------------------------------------*/
volatile int Ua = 0;
volatile int Ub = 0;
volatile int Uc = 0;
void alfabeta_abc (int ualfa, int ubeta)
{
int sqrt3by2 = Q15(0.866);
int ubeta_aux;
ubeta_aux = multiply(ubeta, sqrt3by2);
Ua = ualfa;
Ub = -ualfa/2 - ubeta_aux;
Uc = -ualfa/2 + ubeta_aux;
return;
}
87
C.4 Ficheiro PI.c
/*----------------------------------------------------------------------------------------------------------------------------------------| FILE: PI.c
| DESCRIPTION: PI functions
| DATE: 23/07/2009
-----------------------------------------------------------------------------------------------------------------------------------------*/
#include "p30f4011.h"
#include "dsp.h"
#include "math.h"
#include "libq.h"
#include "common.h"
/*----------------------------------------------------------------------------------------------------------------------------------------------| FUNCTION: PI Current Controller
----------------------------------------------------------------------------------------------------------------------------------------*/
volatile int ed = 0;
volatile int eq = 0;
volatile int ed_ant = 0;
volatile int eq_ant = 0;
volatile int Td = 0;
volatile int Tq = 0;
volatile int ud = 0;
volatile int uq = 0;
volatile int Tmax = Q15(0.9);
volatile int Tmin = Q15(-0.9);
volatile int umax = Q15(0.9);
volatile int umin = Q15(-0.9);
void pi_control (int Id, int Iq, int Id_ref, int Iq_ref)
{
int Kp = Q15(0.98);
int Kih = Q15(0.02);
int errod;
int erroq;
88
int wL = Q15(0.2041);
ed = Id_ref - Id;
eq = Iq_ref - Iq;
//Td = Kp*(ed-ed_ant) + Ki*h*ed_ant + Td;
//Tq = Kp*(eq-eq_ant) + Ki*h*eq_ant + Tq;
errod = ed - ed_ant;
erroq = eq - eq_ant;
//Td = multiply(Kp, errod) + multiply(Kih, ed) + Td;
Td = 2*errod + multiply(Kih, ed) + Td;
//Tq = multiply(Kp, erroq) + multiply(Kih, eq) + Tq;
Tq = 2*erroq + multiply(Kih, eq) + Tq;
if (Td > Tmax){
Td = Tmax;
}
if (Td < Tmin){
Td = Tmin;
}
if (Tq > Tmax){
Tq = Tmax;
}
if (Tq < Tmin){
Tq = Tmin;
}
ud = Td - multiply(wL, Iq);
ed_ant = ed;
uq = Tq + multiply(wL, Id);
eq_ant = eq;
if (ud > umax){
ud = umax;
}
89
if (ud < umin){
ud = umin;
}
if (uq > umax){
uq = umax;
}
if (uq < umin){
uq = umin;
}
return;
}
/*-----------------------------------------------------------------------------------------------------------------------------------------------| FUNCTION: PI Voltage Controller
----------------------------------------------------------------------------------------------------------------------------------------------*/
volatile int id_ref = 0;
volatile int e = 0;
volatile int e_ant = 0;
volatile int idmax = Q15(0.20);
volatile int idmin = Q15(-0.20);
void voltage_pi_control (int Udc, int Udc_ref)
{
int Kpu = Q15(0.99);
int Kiuh = Q15(0.038);
//int Kiuh = 0;
int error;
e = -Udc_ref + Udc;
error = e - e_ant;
//id_ref = multiply(Kpu, error) + multiply(Kiuh, e) + id_ref;
//id_ref = multiply(Kpu, e);
id_ref = 5*e + multiply(Kiuh, e_ant);
if (id_ref > idmax){
90
id_ref = idmax;
}
if (id_ref < idmin){
id_ref = idmin;
}
//e_ant = e;
e_ant = e_ant + e;
return;
}
C.5 Ficheiro PWM.c
/*----------------------------------------------------------------------------------------------------------------------------------------| FILE: PWM.c
| DESCRIPTION: PWM configuration bits
| DATE: 23/07/2009
-----------------------------------------------------------------------------------------------------------------------------------------*/
#include "p30f4011.h"
#define Fosc_FRC 7372800
#define PLL
#define Fpwm
// oscilattor is a fast (7.37 MHz +/-2% nominal)
16
2100
//2Khz PWM
#define Fosc
Fosc_FRC*PLL
#define Fcy
20000000
#define Tcy
(1/Fcy)
//(Fosc/4 ~14 MHz
#define PWMperiod (Fcy/Fpwm)-1 //9999
/*-----------------------------------------------------------------------------------------------------------------------------------------------| FUNCTION: InitPWM
----------------------------------------------------------------------------------------------------------------------------------------------*/
void InitPWM(void)
{
//PTMR=0;
PTPER = PWMperiod;
// Compute Period based on CPU speed and
// required PWM frequency (see defines)
OVDCON = 0x3f00;
//Output in PWMxx I/O pin is controlled by the PWM generator
91
DTCON1 = 0x0020;
//Configured to 1 us of dead time
//DTCON2 = 0;
//FLTACON=0;
//PWM fault pins not used
//FLTBCON=0;
PWMCON1 = 0x0077;
// Enable PWM output pins and configure them as
// complementary mode
PWMCON2 = 0x0002;
// 1 postscale values, for achieving 20 kHz
PDC1 = PTPER;
// Initialize as 0 voltage
PDC2 = PTPER;
// Initialize as 0 voltage
PDC3 = PTPER;
// Initialize as 0 voltage
SEVTCMP =1;
PTCON = 0x8002;
// start PWM as center aligned mode
return;
}
C.6 Ficheiro main.c
/*-------------------------------------------------------------------------------------------------------------------------------------------------| FILE: main.c
| DESCRIPTION: main function
| DATE: 07/09/2009
-----------------------------------------------------------------------------------------------------------------------------------------------*/
#include "p30f4011.h"
#include "dsp.h"
#include "math.h"
#include "libq.h"
#include "common.h"
#define SAMPLES
400
_FOSC(CSW_FSCM_OFF & FRC_PLL16);
_FWDT(WDT_OFF);
_FBORPOR(MCLR_EN & PWRT_OFF);
_FGS(CODE_PROT_OFF);
int Ia;
92
int Ib;
int Vab;
int Vbc;
int Udc;
int iq_ref = 0;
int Udc_ref = 0;
int offsetHIa = -600;
int offsetHIb = -390;
int offsetHVab = -2351;
int offsetHVbc = -3376;
int offsetLIa,offsetLIb,offsetLVab,offsetLVbc;
int qKU = Q15(0.1398);
int qKI = Q15(0.85);
extern volatile int ialfa;
extern volatile int ibeta;
extern volatile int valfa;
extern volatile int vbeta;
extern volatile int sen;
extern volatile int cosen;
extern volatile int id;
extern volatile int iq;
extern volatile int ud;
extern volatile int uq;
extern volatile int ualfa;
extern volatile int ubeta;
extern volatile int Ua;
extern volatile int Ub;
extern volatile int Uc;
extern volatile int id_ref;
int i = 0;
int j = 0;
int aux = 0;
int k = Q15(0.5);
int Kdc = Q15(0.4151);
93
/*-------------------------------------------------------------------------------------------------------------------------------------------------| FUNCTION: Main
---------------------------------------------------------------------------------------------------------------------------------------------*/
int main ( void )
{
TRISE = 0x0100; //0x0100 PWM pins as outputs, and FLTA as input
/* Initialize ADC */
ADC_init();
/* Initialization for PWM at 20kHz, Center Aligned with 1 us of deadtime */
InitPWM();
/* Initialize Timer3 */
TMR3_init();
/* Infinite Loop */
while ( 1 )
{
}
}
/*-------------------------------------------------------------------------------------------------------------------------------------------| FUNCTION: _ADCInterrupt()
-------------------------------------------------------------------------------------------------------------------------------------------------*/
void __attribute__((__interrupt__)) _ADCInterrupt(void)
{
Udc = ADCBUF4 + 1500;
Udc = multiply(Udc, Kdc);
medidas();
abc_alfabeta (Ia, Ib, Vab, Vbc);
alfabeta_dq (ialfa, ibeta, valfa, vbeta);
//voltage_pi_control (Udc, Udc_ref);
//id_ref = Q15(0.125);
pi_control (id, iq, id_ref, iq_ref);
dq_alfabeta (ud, uq, sen, cosen);
alfabeta_abc (ualfa, ubeta);
94
Ua = multiply(Ua,k);
Ub = multiply(Ub,k);
Uc = multiply(Uc,k);
PDC1 = Ua + (PTPER);
PDC2 = Ub + (PTPER);
PDC3 = Uc + (PTPER);
IFS0bits.ADIF = 0;
//Clear the A/D interrupt flag bit
//or else the CPU will keep vectoring back to the ISR
}
C.7 Ficheiro common.h
#include "p30f4011.h"
#include "dsp.h"
#include "math.h"
#include "libq.h"
extern void ADC_init ( void );
extern void __attribute__((__interrupt__)) _ADCInterrupt(void);
extern void abc_alfabeta (int ia, int ib, int vab, int vbc);
extern void alfabeta_dq (int ialfa, int ibeta, int valfa, int vbeta);
extern void dq_alfabeta (int ud, int uq, int sen, int cosen);
extern void alfabeta_abc (int ualfa, int ubeta);
extern int multiply (int a, int b);
extern void pi_control (int Id, int Iq, int Id_ref, int Iq_ref);
extern void voltage_pi_control (int Udc, int Udc_ref);
extern void InitPWM(void);
95
96
Anexo D
Folha de Dados Técnicos
Folha de Dados Técnicos
Este anexo contém as folhas de dados do inversor de tensão, do microprocessador, do sensor de
corrente e do sensor de tensão utilizados neste trabalho.
97
Referências
Referências
[1]
Abdus Sattar, Insulated Gate Bipolar Transistor (IGBT) Basics, IXYS Corporation.
[2]
R. Pires dos Santos, Gerador Eólico Baseado na Máquina de Indução com Conversor
Matricial Ligado no Rotor, Dissertação para obtenção de Grau de Mestre, 2007.
[3]
A. M. Gole, Power Electronics, 2000.
[4]
B. Farid e O. Amar, A Study of New Techniques of Controlled PWM Inverters, European
Journal of Scientific Research, 2009.
[5]
J. Fernando Silva, Electrónica Industrial, Fundação Calouste Gulbenkian, 1998.
[6]
Jorge Zambada, AN1078 – Sensorless Field Oriented Control of PMSM Motors,
Microchip Technology Inc., 2007.
[7]
Fotios N. Gakis e Stavros A. Papathanassiou, Simple Control Schemes for GridConnected Three-Phase Voltage Source Inverters of DG Units.
[8]
E. Levi, Current Control Techniques in High Performance AC Drives, 2001.
[9]
M. P. Kazmierkowski, R. Krishnan e Frede Blaabjerg, Control in Power Electronics,
Academic Press, 2002.
[10]
R. Pena, J. C. Clare, G. M. Asher, Doubly Fed Induction Generator Using Back-to-Back
PWM Converters and its Application to Variable Speed Wind Energy Generation, IEE
Proceedings, 1995.
[11]
MICROCHIP, dsPIC30F4011/4012 Data Sheet, Microchip Technology Inc., 2008
(http://www.microchip.com).
[12]
MICROCHIP, Section 17. 10-bit A/D Converter, Microchip Technology Inc., 2007
(http://www.microchip.com).
[13]
MICROCHIP, Section 15. Motor Control PWM, Microchip Technology Inc., 2007
(http://www.microchip.com).
99