Aparelho Locomotor
VOLUME 2
FUNÇÃO NEUROMUSCULAR E ADAPTAÇÕES À ATIVIDADE FÍSICA
Pedro Pezarat Correia (editor)
Um Corpo de Conhecimentos
UNIVERSIDADE TÉCNICA DE LISBOA
FACULDADE DE MOTRICIDADE HUMANA
Título:
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
Editor:
Pedro Pezarat Correia
Revisão literária: Ana Gomes Faria
Ilustrações: Vanda Foster Silva
Fotografia: Francesca Maiolino
Edição:
© Faculdade de Motricidade Humana
Edições FMH - 1495-688 Cruz Quebrada
Tel.: 21 414 92 70
[email protected] - www.fmh.utl.pt
Impressão: Clássica, artes gráficas S.A.
Tiragem: 1250 exemplares
Data: Fevereiro de 2012
ISBN 978 972 735 179 4
Depósito legal n.º339520/12
Índice
Prefácio
5
PARTE I – CONTROLO E COORDENAÇÃO DO MOVIMENTO
PROPRIEDADES DO MÚSCULO ESQUELÉTICO
Pedro Pezarat Correia e Paulo Armada da Silva
9
COORDENAÇÃO NEUROMUSCULAR
Pedro Pezarat Correia
23
REGULAÇÃO MEDULAR DO MOVIMENTO
Pedro Pezarat Correia
51
REGULAÇÃO DO MOVIMENTO NOS ANDARES SUPERIORES DO SNC
Pedro Pezarat Correia
67
PARTE II – PARTICIPAÇÃO MUSCULAR NO MOVIMENTO
ANATOMIA DE SUPERFÍCIE
Sandro Freitas e Raúl Oliveira
91
ANÁLISE FUNCIONAL DA MUSCULATURA HUMANA
Pedro Pezarat Correia, Raúl Oliveira e Sandro Freitas
113
PARTICIPAÇÃO MUSCULAR EM DIFERENTES AÇÕES MOTORAS
Pedro Pezarat Correia
133
PARTE III – ADAPTAÇÕES DO APARELHO LOCOMOTOR
À ATIVIDADE FÍSICA E À INATIVIDADE
ADAPTAÇÕES MUSCULARES À ATIVIDADE FÍSICA E À INATIVIDADE
Pedro Pezarat Correia e Paulo Armada da Silva
183
ADAPTAÇÕES NEURAIS À ATIVIDADE FÍSICA E À INATIVIDADE
Pedro Pezarat Correia
207
ADAPTAÇÕES DO TECIDO CONJUNTIVO À ATIVIDADE FÍSICA E À INATIVIDADE
Margarida Espanha, António Veloso, Augusto Gil Pascoal e Paulo Armada da Silva
229
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
3
Prefácio
Após o Aparelho Locomotor – Volume 1: Anatomofisiologia dos Sistemas Nervoso, Osteoarticular e Muscular e o manual Aparelho Locomotor: Exercícios e Estudos
Práticos, o livro que agora apresentamos conclui uma coleção de três obras dedicadas
ao estudo do Aparelho Locomotor. Esta coleção dirige-se essencialmente a estudantes
e profissionais intervenientes em áreas em que o movimento humano é objeto de estudo (Ciências do Desporto e Educação Física, Reabilitação Psicomotora, Fisioterapia,
Dança e Ergonomia). Enquanto o Volume 1 descreve os fundamentos anatomofisiológicos do aparelho locomotor, este Volume 2 aprofunda esse conhecimento em tópicos
lecionados em disciplinas posteriores do 1.º e do 2.º ciclo de estudos, como Cinesiologia, Estudos do Movimento ou Função Neuromuscular.
A primeira parte do livro centra-se no estudo dos processos de controlo e coordenação do movimento. Nos dois primeiros capítulos, são identificados e caracterizados respetivamente os fatores musculares e nervosos condicionantes do desempenho
motor, enquanto os dois capítulos seguintes são dedicados à problemática do controlo
do movimento no SNC, nos níveis da medula e dos centros superiores.
A segunda parte refere-se às questões associadas à participação muscular no
movimento. Apresenta um capítulo inicial sobre anatomia de superfície, que procura
habilitar o leitor à identificação na superfície corporal de estruturas do aparelho locomotor, com destaque para os músculos mais intervenientes no movimento humano. No
segundo capítulo, é abordada a anatomia funcional, propondo-se uma sistematização
dos grupos musculares associados aos diferentes movimentos articulares. No terceiro
capítulo, procede-se à caracterização da participação muscular em ações motoras selecionadas como mais representativas do movimento humano.
A terceira parte do livro foca a temática das adaptações do aparelho locomotor à
atividade física e ao desuso. A prática regular e sistematizada de exercício físico induz
no aparelho locomotor alterações estruturais e funcionais que dependem do tipo, intensidade, duração e frequência da solicitação que sofre. Da mesma forma, a ausência ou
redução significativa de atividade apresenta um impacto negativo nas capacidades do
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
5
FACULDADE DE MOTRICIDADE HUMANA
aparelho locomotor. Nos três capítulos que integram esta terceira parte, são sucessivamente estudados três tipos de adaptações: adaptações musculares que ocorrem no
interior do próprio músculo, adaptações neurais que têm lugar no SNC e que consistem
em alterações nos processos nervosos de controlo da atividade muscular e, ainda,
adaptações nas estruturas de tecido conjuntivo como os ossos, cartilagens, tendões
ou ligamentos.
É nossa convicção que esta obra contribuirá para um mais sólido conhecimento
desse complexo e apaixonante fenómeno que é o movimento humano, independentemente do contexto em que este seja realizado. A compreensão e domínio operacional
dos conhecimentos biológicos subjacentes à produção de movimento, e consequentes
adaptações do aparelho locomotor, constituem competências essenciais a uma intervenção mais adequada e versátil dos profissionais que trabalham nas diferentes áreas
da atividade física e saúde.
6
Universidade Técnica de Lisboa
PARTE I – CONTROLO E COORDENAÇÃO DO MOVIMENTO
PROPRIEDADES DO MÚSCULO ESQUELÉTICO
Pedro Pezarat Correia e Paulo Armada da Silva
COORDENAÇÃO NEUROMUSCULAR
Pedro Pezarat Correia
REGULAÇÃO MEDULAR DO MOVIMENTO
Pedro Pezarat Correia
REGULAÇÃO DO MOVIMENTO NOS ANDARES SUPERIORES DO SNC
Pedro Pezarat Correia
Propriedades do Músculo Esquelético
Este capítulo aborda as propriedades contrácteis do músculo esquelético e
os fatores que afetam a sua produção de força e trabalho. Estes resultam, em grande medida, das características morfológicas do músculo esquelético, pelo que a sua
compreensão requer conhecimento sobre a constituição macro e microscópica do
músculo esquelético, bem como da fisiologia da contração muscular1.
Tipos de Ação Muscular
A força produzida pela contração do músculo esquelético, ao ser desenvolvida
no sentido do encurtamento do músculo, tende sempre a aproximar as suas inserções.
Geralmente, esta força é contrariada por outras forças, como a força da gravidade e
outras forças externas, sendo que a relação entre a grandeza da força muscular e das
forças externas permite distinguir três tipos de ação muscular: A) ação muscular estática, B) ação muscular dinâmica concêntrica, e C) ação muscular dinâmica excêntrica.
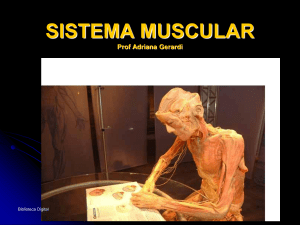
Estes três tipos de ação muscular são ilustrados na Figura 1, utilizando o músculo
braquial anterior como exemplo. Quando se contrai, a força desenvolvida por este
músculo tende a produzir flexão do cotovelo. No entanto, como veremos a seguir, nem
sempre a contração deste músculo tem esse resultado, sendo necessário considerar
três possibilidades:
A) A força de contração do músculo braquial anterior equilibra a resistência. O
músculo não sofre alterações significativas do seu comprimento e a articulação mantém a sua posição; trata-se de uma ação muscular estática. Este
tipo de ação é utilizado para manter posições e fixar segmentos ósseos
contra forças externas.
B) A força produzida pela contração do músculo braquial anterior é superior à
resistência, i.e. ao total de peso do antebraço, da mão e do copo. A inserção
do braquial anterior aproxima-se da origem e o cotovelo flete. Este é um tipo
de ação muscular dinâmico, dado que o comprimento muscular e o ângulo
__________________________
1
Estes conhecimentos são descritos em Pezarat-Correia e Espanha (2010), pp. 245-265.
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
9
FACULDADE DE MOTRICIDADE HUMANA
A
B
C
Figura 1. Ilustração de três tipos de ação do músculo braquial anterior:
A) ação estática; B) ação dinâmica concêntrica; C) ação dinâmica excêntrica.
articular variam, e concêntrico, porque a força contráctil supera a resistência
e o músculo encurta. A ação muscular dinâmica concêntrica é utilizada para
gerar movimento nas articulações corporais.
C) A força de contração do músculo braquial anterior é superada pela força
externa, que é a responsável pelo movimento articular. O músculo alonga
pela ação da força externa e há extensão do cotovelo. Trata-se de uma
ação muscular dinâmica excêntrica, e é utilizada para contrariar as forças
externas, travando o movimento.
10
Universidade Técnica de Lisboa
PROPRIEDADES DO MÚSCULO ESQUELÉTICO
B
A
tF
tF
ap
ap
dF
dF
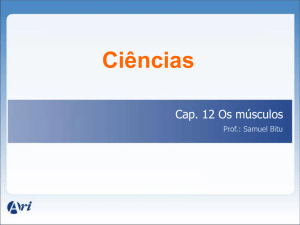
Figura 3. O ângulo de penação (ap) é o ângulo estabelecido entre a fibra muscular e o tendão (ou estrutura conjuntiva onde a fibra se insere). O músculo B apresenta um menor ângulo de penação do que
o músculo A. Em consequência, quando as suas fibras se contraem, verifica-se menor dispersão de
força contráctil (dF) e maior transferência dessa força no sentido da linha de tração do músculo (tF).
área de secção transversal do músculo. Nos músculos penados, embora a inclinação
dos feixes musculares reduza a força no sentido da linha de tração do músculo, a área
de secção transversal pode ser muito superior, já que os feixes musculares podem
inserir-se ao longo de faixas tendinosas longas. Para ângulos de penação até cerca
de 30º, o ganho obtido pelo aumento da área de secção fisiológica é compensador.
Os músculos paralelos estão aptos, pela sua morfologia, a produzir contrações
dinâmicas com maior velocidade, devido ao maior comprimento do ventre muscular e
das fibras musculares que o compõem. No caso dos músculos penados, a sua morfologia está adaptada para gerar maior quantidade de força.
Do ponto de vista biomecânico, o momento de força e a velocidade do movimento articular gerados pela contração de um músculo dependem também do braço
de momento do músculo, isto é, da mínima distância perpendicular medida entre o
ponto de inserção do músculo e o eixo de rotação da articulação onde aquele atua.
Um músculo com um braço de momento superior está em condições de produzir maior
momento de força. Ao contrário, um músculo com um braço de momento mais reduzido está, em termos biomecânicos, desfavorecido para produzir momento de força em
torno da articulação mas, em contrapartida, a sua contração produz maior velocidade
de rotação da articulação. Muitas estruturas anatómicas ósseas servem para modificar o braço de momento muscular, tendo, por isso, uma função biomecânica muito
importante. São exemplos deste tipo de estruturas a rótula, o olecrânio, o calcâneo ou
as apófises espinhosas das vértebras.
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
13
FACULDADE DE MOTRICIDADE HUMANA
Força
(% máx.)
100
80
__
.
.
___
_
_
_
____
60
40
20
1.2
1.6
2.0 2.2 2.5
3.6
Comprimento do sarcómero (µm)
Figura 5. Relação Comprimento-Força na fibra muscular. A zona cinzenta clara representa o
intervalo de variação de comprimento em que os sarcómeros são solicitados no corpo, enquanto
a zona cinzenta escura representa o intervalo de variação de comprimento dos sarcómeros
quando o músculo se encontra no seu comprimento de repouso.
a força contráctil decresce quando o comprimento do sarcómero se torna inferior a
2,0 µm, sendo a diminuição da força mais acentuada quando o comprimento do sarcómero decresce abaixo de 1,6 µm. A diminuição da força produzida pelo sarcómero
quando o seu comprimento varia do comprimento ótimo reflete a redução do número
de pontes cruzadas, resultante de uma menor sobreposição entre os filamentos de
actina e de miosina. A tensão máxima corresponde ao comprimento do sarcómero em
que a sobreposição dos filamentos contrácteis e o número de pontes cruzadas é também máximo. Na parte ascendente da curva Comprimento-Força, a redução da tensão
é devida à sobreposição de filamentos finos no centro do sarcómero e a forças de
resistência que aí se geram. Quando os discos-Z entram em contacto com as extremidades da banda-A, o sarcómero torna-se incapaz de gerar tensão. Em relação à parte
descendente da curva Comprimento-Força, a perda de tensão deve-se à diminuição
da sobreposição entre os filamentos grossos e os filamentos finos.
Dado que uma miofibrilha contraída pode produzir um encurtamento de cerca
de um terço do seu comprimento, quanto maior for o seu comprimento, maior a mudança de comprimento que pode atingir durante a contração. Assim, uma miofibrilha
com número mais elevado de sarcómeros em série tem capacidade, quando se contrai, para promover uma alteração mais pronunciada do seu comprimento, o que altera
a amplitude total da curva Comprimento-Força da fibra muscular.
A curva que representa a relação Comprimento-Força para o músculo completo
é o resultado da combinação da curva ativa associada ao grau de sobreposição dos
filamentos proteicos que constituem os sarcómeros, com a curva passiva que depende
da tensão passiva acumulada pelas estruturas elásticas durante o alongamento. Como
é possível observar na Figura 6, quando o músculo se encontra em comprimentos mais
16
Universidade Técnica de Lisboa
Coordenação Neuromuscular
No capítulo anterior foram estudadas as propriedades do músculo esquelético
e foi analisada a forma como estas condicionam o comportamento muscular. No entanto, é fundamental ter presente que a capacidade de o músculo desenvolver força
através do processo de contração muscular está dependente da chegada ao músculo
de estímulos nervosos e que a regulação de força muscular depende da forma como
o sistema nervoso central (SNC) controla a atividade dos músculos envolvidos numa
determinada ação.
Quando nos referimos à coordenação neuromuscular e equacionamos a forma
como o SNC regula o funcionamento muscular durante a produção de movimentos
corporais, devemos distinguir dois níveis de coordenação. Por um lado, o SNC tem
que assegurar uma intervenção conjugada e complementar dos vários músculos envolvidos na ação, com diferentes papéis, definindo padrões de ação muscular ao longo do tempo – coordenação intermuscular. Por outro lado, o SNC modula a duração
e intensidade de ativação de cada músculo envolvido através dos impulsos nervosos
que gera para o músculo – coordenação intramuscular.
O estudo destes dois níveis de coordenação tem sido realizado com recurso a
uma técnica experimental que regista a atividade elétrica gerada no músculo previamente à contração. Esta técnica de estudo da função neuromuscular – eletromiografia – será caracterizada brevemente num ponto prévio ao estudo dos processos de
coordenação neuromuscular.
A Eletromiografia e o Estudo da Coordenação Neuromuscular
Tal como indica o significado literal da palavra, a eletromiografia (EMG) é um
método de estudo da atividade muscular que se baseia na representação gráfica da
atividade elétrica do músculo1. O processo de excitação da célula muscular por parte
do sistema nervoso, que culmina com a ativação das proteínas contrácteis, passa
__________________________
1
O desenvolvimento aprofundado dos fundamentos e métodos da eletromiografia podem ser encontrados em Pezarat-Correia
e Mil-Homens (2004).
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
23
COORDENAÇÃO NEUROMUSCULAR
da intensidade dos períodos de ativação que podem ser relacionados com parâmetros
caracterizadores da consequência mecânica da intervenção dos músculos estudados
(Figura 2). O fácil manuseamento e controlo para o investigador, o maior conforto para
o executante e a possibilidade de uma análise global do comportamento dos músculos
Figura 2. O sinal EMG em bruto (A) apresenta valores positivos e negativos de amplitude aproximadamente idênticos, resultando numa média igual a zero. A retificação do sinal EMG (B)
consiste na transformação da curva EMG em bruto numa curva de valores todos positivos. Uma
forma de reduzir a variabilidade que caracteriza o sinal EMG consiste na eliminação das variações muito bruscas dos valores de amplitude do sinal, através da suavização da curva que pode
ser realizada com recurso a diferentes métodos. No presente caso, a suavização (C) foi obtida
através de um filtro passa-baixo de 12 Hz (Butterworth de 4.ª ordem). Quando pretendemos comparar execuções do mesmo indivíduo realizadas em dias diferentes ou execuções de diferentes
indivíduos, o valor absoluto da intensidade do sinal EMG fornece-nos pouca informação, porque
pode ser influenciado por outros fatores, como o local onde foram colocados os elétrodos ou a
impedância da pele nesse instante. Uma das formas de ultrapassar esta limitação é a normalização em amplitude das curvas EMG, que consiste na transformação dos valores absolutos de
amplitude do sinal EMG, expressos em milivolts, em valores relativos a uma EMG de referência.
Nesta figura, o sinal EMG foi normalizado (D) utilizando como referência (100%) a amplitude do
sinal EMG obtido pelo mesmo músculo deste indivíduo durante uma contração isométrica voluntária máxima. Assim, o sinal EMG das diferentes execuções é expresso em valor percentual, que
traduz um nível de ativação relativo à ativação máxima do músculo.
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
25
COORDENAÇÃO NEUROMUSCULAR
Figura 3. Cada um dos três motoneurónios vai ramificar-se dentro do músculo
e inervar um conjunto de fibras musculares constituindo uma unidade motora.
O número de fibras de uma unidade motora designa-se por taxa de inervação e
pode variar entre menos de uma dezena e alguns milhares, dependendo do músculo
em causa. Músculos relacionados com ações muito precisas, como os músculos oculomotores, responsáveis pelo movimento dos olhos, apresentam cerca de dez fibras
por unidade motora. Os músculos que atuam nos dedos da mão, também sujeitos
a um controlo preciso, podem apresentar unidades motoras com cem ou algumas
centenas de fibras musculares. Já os músculos relacionados com atividade grosseira,
como os músculos dos braços, das coxas e das pernas, podem apresentar unidades
motoras com mais de mil fibras.
O conjunto de unidades motoras de um músculo designa-se por grupo motor
e distribui-se por vários segmentos medulares. Um grupo motor pode incluir apenas
poucas dezenas de unidades motoras, no caso dos músculos mais pequenos, ou
mais de um milhar para os músculos mais volumosos. Os comandos centrais geradores dos movimentos atuam nas cadeias de motoneurónios espinais, modulando
a atividade muscular através da quantidade de estimulação que fornecem ao grupo
motor de cada músculo.
As fibras musculares que constituem uma unidade motora são todas do mesmo tipo. A homogeneidade estrutural e funcional que encontramos entre as fibras
musculares que constituem uma unidade motora está adaptada a um certo tipo de
contração e é determinada pelas características e pelo tipo de atividade do motoneurónio respetivo, como foi verificado em experiências de inervação cruzada2. A variedade de características das diferentes unidades motoras que constituem um músculo
__________________________
2
Ver artigo de Buller e colaboradores (1960).
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
27
COORDENAÇÃO NEUROMUSCULAR
o número de articulações que atravessa ou o braço de momento do músculo são fatores
determinantes na apetência desse músculo para um determinado papel funcional.
Mesmo o movimento mais simples requer a intervenção coordenada de vários
músculos simultaneamente, cada um deles desempenhando um papel bem definido
no leque de funções complementares necessárias. Podemos, assim, falar de músculos agonistas, músculos antagonistas, músculos fixadores e músculos neutralizadores. Desta forma, para além da gestão da contração de cada músculo individualmente, abordada no ponto anterior, o SNC tem que assegurar, para cada tarefa motora, a
coordenação entre todos os músculos implicados na ação.
Coordenação agonista-antagonista
As noções de músculo agonista e de músculo antagonista são relativas ao tipo
de movimento articular realizado, procurando descrever o modo de participação dos
músculos no movimento. Os grupos musculares agonista e antagonista têm capacidade para produzir movimentos opostos numa determinada articulação (Figura 6).
Um músculo é designado como agonista quando é responsável pela realização do
movimento através de uma ação dinâmica concêntrica. A designação de antagonista
é atribuída ao músculo cuja ação potencial é contrária ao movimento realizado.
A
B
Figura 6. Relação agonista-antagonista utilizando como exemplo a relação entre o bicípite braquial e o tricípite braquial. A contração dos músculos agonistas gera a força necessária para
a deslocação do segmento corporal onde atuam. Durante a flexão do antebraço (A) o bicípite
braquial é agonista e o tricípite braquial é antagonista. Estes papéis invertem-se durante o movimento de extensão do antebraço (B), em que o tricípite braquial é agonista e o bicípite braquial
é antagonista.
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
37
FACULDADE DE MOTRICIDADE HUMANA
De uma forma simplificada, podemos dizer que, enquanto os músculos monoarticulares se encarregam de gerar a força com grandes intensidades de contração,
os músculos biarticulares servem para transmitir forças propulsivas produzidas por
esses poderosos músculos até à extremidade. Isso ocorre em ações em que o músculo biarticular sofre uma alteração muito reduzida de comprimento, dado funcionar
como músculo antagonista numa das articulações e agonista na outra. É o caso do
comportamento do reto femoral ou dos gémeos durante a impulsão vertical. A chave
para este tipo de movimento explosivo está numa eficiente cooperação entre músculos monoarticulares e biarticulares. A capacidade de transferência de energia entre
articulações, atributo principal dos músculos biarticulares, depende dos processos de
coordenação neuromuscular entre esses músculos e os músculos monoarticulares.
As ações motoras em que os músculos biarticulares são simultaneamente
agonistas nas duas articulações que atravessam são menos frequentes. A extensão
vigorosa da perna com flexão da coxa (em que o reto femoral é agonista nas duas articulações), que pode ser observada no remate de futebol ou no ataque a uma barreira,
exemplifica essa situação. Durante estes movimentos, a velocidade de encurtamento
dos músculos biarticulares é maior do que a dos monoarticulares correspondentes,
dado que o movimento de ambas as articulações que o músculo atravessa concorre para o encurtamento do músculo. Por essa razão, a capacidade de os músculos
biarticulares gerarem forças elevadas nessas ações é menor, de acordo com a curva
velocidade-força que preconiza uma relação inversa entre velocidade de encurtamento e força de contração. Em contrapartida, o seu rápido encurtamento fornece um
contributo bastante importante para a velocidade do movimento.
Papel dos músculos fixadores
Para que os músculos agonistas e antagonistas possam atuar eficazmente nos
segmentos corporais onde se inserem, as suas origens têm que estar fixas, fornecendo
ao músculo um ponto estável para produzir a sua força. Essa estabilização das origens
dos músculos agonistas e antagonistas é garantida pela força de outros músculos, através de uma ação estática gerada em sentido contrário e com força igual à desenvolvida
por aqueles músculos. Quando tal acontece, diz-se que o músculo se comporta como
músculo fixador ou músculo estabilizador (Figura 10). Músculos que frequentemente funcionam como fixadores são os que atuam nas cinturas pélvica e escapular. Para que a
contração dos músculos agonistas dos movimentos do braço seja eficaz, é necessário
que a sua origem – a omoplata – esteja fixa contra a tendência para se deslocar. Essa
fixação da omoplata é assegurada por músculos fixadores como o trapézio ou o grande
dentado. É também exemplo dessa função fixadora a ação dos músculos da parede
ântero-lateral do abdómen na estabilização da bacia, permitindo a utilização dos potentes
44
Universidade Técnica de Lisboa
COORDENAÇÃO NEUROMUSCULAR
Figura 10. Durante a abdução do braço, a contração estática do trapézio (principalmente da sua
porção superior) é necessária para fixar a origem do deltoide, principal agonista do movimento.
O trapézio funciona como fixador. Por sua vez, para poder estabilizar a omoplata, o trapézio precisa também de ter a sua origem na coluna fixa, o que é garantido pela contração dos músculos
espinais que funcionam como fixadores de segunda ordem.
músculos flexores da coxa que aí têm origem. Por sua vez, a fixação da origem dos músculos fixadores tem também de ser garantida, exigindo a contração de outros músculos
que podemos designar como fixadores de segunda ordem.
Os músculos fixadores assumem um papel determinante no nosso corpo. Uma
execução conseguida exige um controlo coordenado e temporalmente adequado dos
grupos musculares agonistas e fixadores. Como a ação dos músculos fixadores não
é tão evidente, e também porque normalmente são músculos com menor visibilidade
por se localizarem mais profundamente, são pouco valorizados do ponto de vista do
treino e do condicionamento muscular. No entanto, é importante ter presente a necessidade de trabalhar este tipo de musculatura, dado que a sua fraqueza acarreta menor
eficiência de movimentos e maior risco de lesão musculoesquelética.
Uma outra forma de estabilização muscular está presente quando utilizamos
músculos multiarticulares. No caso de movimentos que são produzidos por músculos
que atuam em mais do que uma articulação, a ação dos músculos fixadores é importante quando é necessário anular o movimento indesejável que seria produzido numa
das articulações que o músculo atravessa. Consideremos a contração do músculo
flexor comum dos dedos para produzir a flexão dos dedos da mão necessária para
realizar a pega numa raquete. A força desenvolvida por esse músculo tende a promover a flexão da mão. Essa tendência é anulada graças à contração dos músculos
extensores da mão, como os radiais externos, que atuam em ação estática no sentido
de estabilizar o pulso, contrariando a flexão da mão.
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
45
Regulação Medular do Movimento
O Motoneurónio Alfa como Ponto de Convergência
Como vimos no capítulo anterior, a regulação das contrações baseia-se essencialmente na forma como o SNC otimiza os mecanismos de coordenação intramuscular: recrutamento e frequência de descarga das unidades motoras. Estes mecanismos
assentam na gestão da atividade do conjunto de motoneurónios alfa que inervam
cada músculo, através do tipo e quantidade de excitação neural que converge para os
seus corpos celulares. A ativação e frequência de disparo de um motoneurónio resultam do balanço entre dois fatores: o valor do seu limiar de excitação e a intensidade
do sinal que lhe é fornecido por vias descendentes e/ou periféricas.
A grande dimensão do corpo celular do motoneurónio alfa e a superfície por
onde se estendem as suas dendrites1 estão de acordo com o elevado número de conexões sinápticas que recebe de múltiplas fontes e com a noção de via final comum
de Sherrington. O motoneurónio alfa apresenta, portanto, características estruturais
que lhe permitem ser um ponto de convergência de informação de fontes muito diversas: encéfalo, recetores e interneurónios. Em última análise, toda esta informação é
passível de interferir no controlo do movimento, influenciando as alterações de potencial dos motoneurónios.
A influência das vias descendentes originadas nos andares superiores e provenientes dos diferentes centros corticais e subcorticais com intervenção no controlo
motor é fundamental e será descrita posteriormente. No entanto, é fundamental ter
presente que uma parte muito considerável do controlo do músculo esquelético é realizado ao nível medular, com base na informação periférica proveniente de um amplo
conjunto de recetores somáticos e nas redes de interneurónios da substância cinzenta
medular.
__________________________
1
As dendrites dos motoneurónios alfa estendem-se para além da lâmina IX de Rexed, onde se encontram os seus corpos celulares,
até às lâminas VII e VIII. A maior parte das dendrites encontra-se, no entanto, orientada longitudinalmente na coluna a que pertence o motoneurónio, principalmente nas colunas respeitantes aos músculos do tronco e músculos proximais das extremidades. As
dendrites de um motoneurónio podem sobrepor-se a muitas centenas de motoneurónios adjacentes (Brodal, 1981).
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
51
FACULDADE DE MOTRICIDADE HUMANA
No que compete às influências reflexas a que os motoneurónios estão sujeitos,
oriundas de recetores variados como os localizados na pele, nas articulações e nos
músculos, dois mecanorrecetores musculares apresentam um papel bastante relevante (Figura 1). Os fusos neuromusculares (FNM) que encontramos no interior do
músculo, paralelamente às fibras musculares, são sensíveis ao alongamento do músculo e estão na base do mais importante mecanismo reflexo, o reflexo miotático. Os
órgãos tendinosos de Golgi (OTG) estão dispostos em série com as fibras musculares,
encontrando-se na junção miotendinosa, sendo, assim, sensíveis à tensão que o músculo transmite ao tendão. Estes dois tipos de recetores musculares continuam-se por
fibras aferentes, as fibras Ia, II e Ib, que terminam na substância cinzenta medular. Aí,
para além de originarem informação ascendente, que fornece aos centros superiores
conhecimento sobre o estado do músculo, têm terminações que influenciam, direta ou
indiretamente, os motoneurónios. Estabelecem, assim, mecanismos reflexos muito
importantes, o reflexo miotático, com base no FNM, e o reflexo miotático inverso, que
resulta da estimulação do OTG.
A
II
Ia
C
Ib
B
Figura 1. Mecanorrecetores do músculo esquelético e respetiva inervação sensitiva. A – Músculo
esquelético com localização de um fuso neuromuscular e de um órgão tendinoso de Golgi. B –
Fuso neuromuscular com a sua inervação motora (a azul) feita através do motoneurónio gama
e inervação sensitiva (a amarelo) através das fibras Ia e II. C – Órgão tendinoso de Golgi e sua
inervação sensitiva, as fibras Ib.
52
Universidade Técnica de Lisboa
REGULAÇÃO MEDULAR DO MOVIMENTO
verifica. Assim, informam apenas sobre o grau de estiramento. Apesar de produzirem
uma ação excitatória sobre os motoneurónios, não é claro se sobre eles apresentam
ou não terminação monossináptica.
Os aferentes II e Ia do fuso neuromuscular devem ser encarados como dois canais distintos mas complementares. Os primeiros transportam informação sobre a posição do segmento e são utilizados fundamentalmente no controlo de movimentos lentos,
enquanto os segundos são bastante mais importantes nos movimentos rápidos.
Para além da sua grande importância como sensor do grau e velocidade do
estiramento muscular, o fuso neuromuscular está também na base de um reflexo fundamental na regulação da atividade motora, o reflexo miotático. Este consiste, sumariamente, na tendência para o aumento de tensão de um músculo após ter sofrido
um estiramento (Figura 3). Como tem uma componente monossináptica, este reflexo
permite que a resposta do músculo seja quase imediata, evitando estiramentos não
desejados e representando um mecanismo para manter o comprimento pretendido
para o músculo quando tal é necessário.
v
2
v
1
4
3
5
Figura 3. Reflexo miotático: o alongamento do quadricípite crural (1) é detetado pelos FNM (2),
estimulando as suas fibras sensitivas (3). A terminação monossináptica destas fibras nos motoneurónios alfa (4) do quadricípite promove um aumento de tensão nesse músculo. Está também
representado o respetivo processo de inervação recíproca: ramos colaterais das fibras aferentes
do FNM ativam um interneurónio inibitório (representado a preto) que contribui para a menor
ativação dos motoneurónios (5) dos músculos posteriores da coxa e uma consequente redução
de tensão desses músculos.
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
55
REGULAÇÃO MEDULAR DO MOVIMENTO
v
1
v
2
3
4
5
Figura 6. Reflexo miotático inverso: o aumento de tensão do quadricípite crural (1) é detetado
pelos OTG (2), estimulando as suas fibras sensitivas (3). A terminação destas fibras num interneurónio inibitório (representado a preto) vai diminuir a ativação dos motoneurónios alfa (4) do
quadricípite. Está também representado o respetivo processo de inervação recíproca: ramos
colaterais das fibras aferentes do OTG ativam um interneurónio excitatório (representado a vermelho) que contribui para aumentar a ativação dos motoneurónios dos músculos antagonistas,
os músculos posteriores da coxa (5).
Importância funcional do OTG
Várias evidências sugerem que o OTG é muito mais do que um recetor
ao qual compete apenas uma função protetora em contrações de grande intensidade. As aferências quantitativamente mais importantes que
o interneurónio Ib recebe provêm das fibras Ib provenientes dos OTG
do mesmo músculo, de músculos sinérgicos e dos músculos antagonistas.
Mas, para além dessas, parece receber também informação das fibras
Ia e II dos fusos neuromusculares (Harrison & Jankowska, 1985a,b) e
das fibras dos recetores articulares e cutâneos (Lundberg et al., 1975,
1977, 1978; Harrison & Jankowska, 1985a,b). Quanto às aferências
descendentes, os interneurónios Ib sofrem influência facilitadora das fibras cortico-espinais (Lundberg & Voorhoeve, 1962; Illert et al., 1976;
Harrison & Jankowska, 1985a,b) e rubro-espinais (Hongo et al., 1969;
Harrison & Jankowska, 1985a,b) e inibitória das fibras retículo-espinais
(Engberg et al., 1968a,b). Esta diversidade de influências que convergem para o interneurónio Ib modula permanentemente a sua atividade, o que sugere ser pouco provável que a inibição a que sujeita os
motoneurónios esteja ligada, de forma linear, à tensão desenvolvida
na contração. A ideia clássica de que o circuito Ib funciona como um
sistema de proteção, destinado a inativar os motoneurónios em tensões
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
61
Regulação do Movimento nos
Andares Superiores do SNC
As informações sensoriais que a todo o momento recebemos são selecionadas e identificadas de forma a permitir uma avaliação da situação. É com base nessa
avaliação que o sistema nervoso central (SNC) tem condições para decidir, ou seja,
escolher a resposta mais adequada à situação, o que se pode traduzir na escolha de
uma determinada execução motora. A partir do instante da tomada de decisão, dependente das áreas pré-frontais do córtex cerebral em conjugação com as estruturas do
sistema límbico, a produção de um movimento implica a entrada em ação, por uma
determinada ordem, de diferentes estruturas do sistema motor organizadas de forma
hierárquica.
Em função da decisão tomada, o movimento é globalmente representado sob
a forma de um objetivo (lançar uma bola, saltar por cima de um obstáculo, agarrar
um objeto) em áreas corticais associativas. Essa ideia abstrata sobre o movimento
pretendido tem que ser convertida em rotinas neurais associadas com o padrão de
atividade muscular adequado, o que requer a escolha do(s) programa(s) motor(es)
que melhor serve(m) o objetivo. A área motora suplementar, embora não armazene
os programas motores, conhece os locais onde se deve dirigir para pôr em ação os
mecanismos neurais responsáveis pelo acionamento da sequência de programas motores adequada ao objetivo definido. Nos movimentos voluntários, o influxo nervoso
desta área motora do córtex cerebral solicita a programação dos parâmetros do movimento aos diferentes centros de programação motora localizados no encéfalo.
Estas estruturas devolvem o resultado dos seus cálculos para a área cortical
da motricidade voluntária, que descodifica essas instruções em comandos específicos
de output para a medula, determinando o início do movimento pela estimulação das
unidades motoras correspondentes. A frequência e duração dos estímulos originados
nos motoneurónios alfa traduzem-se na sequência de contrações, na sua intensidade e
estrutura temporal.
Paralelamente ao controlo dos aspetos voluntários do movimento, o córtex cerebral
delega nos centros subcorticais a regulação dos aspetos involuntários, nomeadamente os
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
67
FACULDADE DE MOTRICIDADE HUMANA
cerebelo tem sido associado com o controlo dos parâmetros temporais
do movimento, enquanto aos núcleos da base tem sido atribuído fundamentalmente o controlo da intensidade das ativações (Ivry, 1986;
Berardelli et al., 1996). Mais especificamente, o córtex lateral do cerebelo e o núcleo dentado têm uma função muito relevante na pré-programação do padrão muscular característico dos movimentos balísticos,
o padrão fásico, e no timing de ativação de músculos agonistas e antagonistas. Esta inversão de ativação muscular entre músculos agonistas
e antagonistas é um dos fatores fundamentais da pré-programação
de movimentos balísticos, sendo responsável pela frenagem do movimento. A capacidade que o cerebelo tem de prever automaticamente
a velocidade do movimento e o tempo que demora até ser atingido o
ponto de intenção permite-lhe inverter a atividade muscular agonista/
antagonista no momento adequado. Estudos realizados em pacientes
humanos com lesões no cerebelo mostraram que, ao contrário do que
normalmente é evidenciado em sujeitos sem lesões, os pacientes cerebelosos apresentavam ausência do padrão fásico característico de
movimentos balísticos e da reciprocidade entre atividade agonista e
antagonista (Terzuolo, Soechting, & Viviani, 1973a,b; Hallet, Shahani, & Young, 1975) ou evidenciavam alteração da estrutura temporal
agonista/antagonista (Becker, Kunesch, & Freund, 1990; Berardelli et
al., 1996).
Iniciação do Movimento
As ordens iniciadoras dos movimentos voluntários resultantes das instruções
motoras programadas são transmitidas aos motoneurónios medulares através das
fibras do feixe cortico-espinal. A maior parte destas fibras tem origem na área cortical
da motricidade voluntária, a área 4 de Brodmann. Do seu contingente, destacam-se
as fibras originadas nas células piramidais de Betz que, embora representando uma
pequena percentagem da totalidade de fibras que constituem o feixe cortico-espinal,
parecem ter uma importância capital no movimento voluntário (Figura 1). No seu trajeto descendente, estes axónios de grande calibre e elevada velocidade de condução
passam na parte anterior do bolbo, nas pirâmides bulbares, onde a maior parte cruza
para o lado contrário, constituindo o cruzamento motor. Continuam depois pela substância branca da medula, até atingirem o segmento medular respetivo.
Na sua terminação na substância cinzenta da medula, as fibras das células
de Betz apresentam a capacidade de estimular os motoneurónios, quer diretamente
através de ligações monossinápticas, quer indiretamente através dos interneurónios.
Apresentam terminações monossinápticas nos motoneurónios alfa que inervam os
74
Universidade Técnica de Lisboa
REGULAÇÃO DO MOVIMENTO NOS ANDARES SUPERIORES DO SNC
A
B
1
2
2
5
4
3
Figura 1. Células piramidais de Betz pertencentes ao feixe cortico-espinal. A – Trajeto descendente
de fibra de célula piramidal de Betz do feixe piramidal cruzado: corpo celular de célula piramidal de
Betz na área 4 do córtex cerebral (1), cruzamento motor no bolbo raquidiano (2) e terminação na medula onde estabelecem sinapse com os motoneurónios alfa (3). B – Terminação nos motoneurónios
medulares: fibra de célula piramidal de Betz do feixe piramidal cruzado (4) e fibra de célula piramidal
de Betz do feixe piramidal direto (5).
músculos com ação nos segmentos distais. Este tipo de terminações assegura um
controlo mais direto e preciso destes músculos, ajudando a explicar, por exemplo, a
utilização tão versátil e simultaneamente tão precisa da mão.
Os impulsos das fibras cortico-espinais modulam os níveis de recrutamento e
frequência de descarga das unidades motoras e determinam o início e fim dos movimentos, bem como a sua velocidade e a força empregue. A força vai depender do número de células cortico-espinais estimuladas e da sua frequência de descarga, enquanto a duração da contração é determinada pela duração da atividade dessas células.
Antes de deixar o encéfalo, as fibras cortico-espinais enviam ramos colaterais
aos núcleos da ponte, onde uma cópia da ordem motora, cópia da eferência, é enviada
ao cerebelo1. A ampla convergência de informações sensoriais, principalmente musculares e articulares, permite ao cerebelo aferir da adequação da ordem motora cortical
ao estado momentâneo do aparelho locomotor. A existirem aspetos que o justifiquem, o
cerebelo origina os respetivos estímulos corretivos para a área cortical da motricidade
__________________________
1
Os axónios dos núcleos da ponte chegam ao cerebelo através dos pedúnculos cerebelosos médios e constituem no cerebelo as
fibras musgosas.
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
75
FACULDADE DE MOTRICIDADE HUMANA
1
2
3
4
5
Figura 3. Algumas estruturas implicadas na regulação dos aspetos involuntários do movimento:
neurónio com origem nas áreas motoras do córtex cerebral e terminação no neoestriado (1),
neurónio com origem no paleoestriado (2), exemplo de fibra do feixe retículo-espinal (3), exemplo
de fibra do feixe vestíbulo-espinal (4), motoneurónio (5).
Papel do corpo estriado no comportamento motor
Para além das fibras cortico-espinais, no córtex motor têm também origem células que têm axónios curtos que não cruzam para o lado oposto
e que terminam nos gânglios da base, mais precisamente no neoestriado. A influência do córtex cerebral faz-se através do controlo sobre o
neoestriado, que por sua vez regula a atividade do paleoestriado. Este,
apesar de não ter conexões diretas para a medula, apresenta controlo
direto sobre os centros encefálicos subcorticais que originam feixes descendentes para a medula, como a substância reticulada, os núcleos vestibulares, os tubérculos quadrigémeos ou o núcleo rubro. As fibras originadas nesses centros encefálicos localizados abaixo do córtex terminam
na medula e influenciam, direta ou indiretamente, os motoneurónios alfa
e gama dos grupos musculares da nuca, tronco, cinturas e articulações
proximais dos membros. São, assim, responsáveis pela regulação do
nível base de excitação desses motoneurónios e, portanto, pelo tónus
que serve de suporte às diferentes ações. Nestas fibras podemos incluir
as retículo-espinais, vestíbulo-espinais e teto-espinais. As fibras rubroespinais distinguem-se das outras fibras com origem subencefálica, sendo normalmente incluídas num sistema descendente distinto4.
__________________________
4
78
Foi verificado que no gato, e aparentemente também no macaco, este feixe constitui uma via alternativa e indireta para a informação transportada pelas fibras cortico-espinais, apresentando evidentes analogias com o feixe piramidal nas suas terminações
medulares e na facilitação dos neurónios flexores.
Universidade Técnica de Lisboa
REGULAÇÃO DO MOVIMENTO NOS ANDARES SUPERIORES DO SNC
Feixes vestíbulo-espinais e regulação do equilíbrio
A posição vertical do corpo contra a força da gravidade é mantida pela contração de determinados grupos musculares que estabilizam a posição das articulações
do tronco e do membro inferior. Os músculos que desempenham essas funções designam-se por músculos antigravíticos e são constituídos pelos músculos extensores
da coluna (fundamentalmente os mais profundos) e os extensores das principais articulações do membro inferior (coxofemoral, joelho e tornozelo). A contração dos músculos antigravíticos, apesar de pouco intensa, é permanente quando o homem está na
posição bípede e é maioritariamente controlada a um nível subconsciente. Conforme
a posição do corpo e as condições exteriores, captadas pelos recetores sensoriais,
verifica-se um determinado nível de ativação dos motoneurónios medulares daqueles músculos, em função das influências reflexas e descendentes que recebem. As
informações sensoriais têm condições para desencadear, principalmente na medula
e nos núcleos vestibulares, mecanismos inconscientes muito rápidos que vão atuar
nos motoneurónios medulares, promovendo os ajustamentos necessários. Só assim
conseguimos produzir compensações quase imediatas que nos permitem manter o
equilíbrio em situações de grande instabilidade e em que as condições envolventes
se alteram de forma brusca.
Os núcleos vestibulares são um importante centro de controlo do processo de
equilíbrio, para eles convergindo informação de diferentes recetores sensoriais implicados nesse processo. Recebem aferências diretas dos recetores vestibulares do
ouvido interno, enquanto a informação de outros recetores importantes para o equilíbrio lhes chega através do cerebelo. Em função da integração dessas informações, os
núcleos vestibulares têm, assim, condições para determinar ajustamentos posturais
rápidos através de eferências para a medula pelos feixes vestíbulo-espinais. Estes
feixes atuam nos motoneurónios alfa e gama e controlam seletivamente os sinais
excitatórios para os músculos antigravíticos com o objetivo de manter o equilíbrio em
resposta a sinais provenientes do aparelho vestibular e de outros recetores envolvidos
no processo de equilibração.
No processo de convergência de informação sensorial para os centros implicados no controlo da musculatura antigravítica, são determinantes os recetores sensoriais que informam sobre as alterações de posição e movimento corporais. Vejamos,
de seguida, os recetores sensoriais cuja informação é mais importante para o processo de regulação do equilíbrio.
Recetores vestibulares – a posição da cabeça, devido ao seu peso relativo e à
localização de recetores importantes para o processo de equilíbrio, como os recetores
da visão, tem grande influência no equilíbrio corporal. Um contributo fundamental para
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
79
PARTE II – PARTICIPAÇÃO MUSCULAR NO MOVIMENTO
ANATOMIA DE SUPERFÍCIE
Sandro Freitas e Raúl Oliveira
ANÁLISE FUNCIONAL DA MUSCULATURA HUMANA
Pedro Pezarat Correia, Raúl Oliveira e Sandro Freitas
PARTICIPAÇÃO MUSCULAR EM DIFERENTES AÇÕES MOTORAS
Pedro Pezarat Correia
Anatomia de Superfície
A anatomia de superfície é a área de estudo que trata da identificação visual
e/ou por palpação manual das estruturas anatómicas, procurando proceder à sua
localização projetada na superfície corporal e reconhecer as suas formas e relações
com estruturas vizinhas. Neste capítulo, pretende-se desenvolver no leitor as capacidades de localizar e palpar à superfície corporal as principais estruturas anatómicas
do aparelho locomotor/sistema neuromusculoesquelético. São apresentados textos
descritivos sobre várias estruturas anatómicas, bem como a caracterização de procedimentos sobre técnicas de palpação acompanhada de imagens exemplificativas. No
estudo da anatomia de superfície, em particular com o recurso ao presente capítulo, é
importante ter presentes algumas considerações técnicas na concretização da técnica
manual, de modo a garantir um procedimento eficaz, nomeadamente:
- Em geral, as descrições técnicas partem da posição descritiva anatómica, à
exceção de situações particulares, sendo estas referidas oportunamente;
- Deve-se usar, preferencialmente, os 2.º e 3.º dedos, por questões técnicas
(i.e. potenciar a sensibilidade), mas também sociais (i.e. tornando a palpação o menos invasiva possível);
- Durante a palpação, a área de contacto determina a pressão exercida por
unidade de superfície. Por conseguinte, é importante considerar a pressão
exercida durante os exercícios de palpação, de modo a garantir a sua eficácia
e ao mesmo tempo assegurar o conforto e segurança do sujeito observado;
- Para palpar os tecidos/estruturas localizados num plano mais profundo, é
necessário aplicar mais força de pressão durante o contacto corporal;
- Dada a variabilidade corporal entre sujeitos, sempre que existe dificuldade na
identificação de uma dada estrutura, deve-se partir de estruturas anexas;
- Algumas estruturas só podem ser sentidas durante técnicas de palpação
dinâmica – isto é, durante a realização de movimentos enquanto se palpa, e
em posições que melhor permitem acesso às estruturas anatómicas;
- Para a identificação dos grupos musculares, deve solicitar-se a contração
isométrica dos mesmos, oferecendo resistência no sentido oposto às suas
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
91
ANATOMIA DE SUPERFÍCIE
do trapézio apresenta-se saliente na região entre o occipital e a clavícula (Figura 3–E1),
onde é possível palpar com facilidade o bordo anterior do músculo. A porção inferior do
trapézio (Figura 3–E2) destaca-se da grelha costal se o sujeito colocar a mão atrás das
costas (palma da mão virada para trás) não contraindo a musculatura do ombro.
Membro Superior
Na região proximal do braço é possível palpar duas saliências ósseas do úmero
que funcionam como ponto de inserção de alguns grupos musculares: o troquiter e
o troquino. O troquiter localiza-se na face externa da epífise proximal do úmero, e o
troquino na face ântero-interna – em conjunto delimitam a goteira bicipital. Para os
palpar, coloca-se os dedos indicador, médio e anelar numa linha horizontal imaginária
situada imediatamente abaixo do acrómio (Figura 4). A alternância dos movimentos de
rotação interna e externa do braço permite sentir o troquino e o troquiter. Entre as duas
saliências é possível identificar a goteira bicipital preenchida pelo tendão da longa porção do bicípite braquial. A palpação pode ser facilitada com o braço em extensão. Ao
palpar este acidente, deve-se assegurar o relaxamento do bicípite braquial, dado que
a sua contração tende a esbater os contornos da goteira. A palpação deve ser feita de
forma delicada, dado que a pressão excessiva sobre a goteira tende a ser dolorosa.
O músculo bicípite braquial, que se apresenta na região anterior do braço, destaca-se aquando da flexão do antebraço aproximadamente a 90º em supinação contra resistência (Figura 5). O volume do seu ventre tende a deslocar-se superiormente
quando se produz a supinação. Na porção proximal, é possível diferenciar a curta e a
Figura 4. Posicionamento inicial para realização da ação dinâmica de
rotação externa e interna, visando palpação dos acidentes troquino, troquiter e goteira bicipital.
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
95
FACULDADE DE MOTRICIDADE HUMANA
A
v
C
E
v
v
v
v
v
v
v
v
D
F
v
v
v
B
C
Figura 7. A – Músculos da região tenar; B – Músculos da região hipotenar; C – Articulações
interfalângicas proximais e distais (no polegar, é apenas denominada articulação interfalângica);
D – Tendão distal do pequeno palmar; E – Tendão distal do grande palmar; F – Pisiforme.
E
v
D
C
B
v
v
v v
v
v
I
H
v
v
v
A
v
v
v
v
v
v
F
v
v
G
Figura 8. A – Articulações interfalângicas distais; B – Articulações interfalângicas proximais; C –
Articulações metacárpico-falângicas; D – Cabeça do cúbito; E – Tendão distal do longo extensor
do polegar; F – Tendão distal do curto extensor do polegar; G – Tendão distal do longo abdutor
do polegar; H – Tabaqueira anatómica; I – Apófise estiloide do rádio.
é possível identificar o escafoide. Na extremidade oposta, na epífise distal do cúbito, encontramos a apófise estiloide do cúbito adjacente à cabeça do cúbito (Figura 8). Esta
corresponde à elevação que é possível observar na metade inferior da face posterior e
interna do antebraço (Figura 8).
Na região palmar da mão encontramos um conjunto agrupado de estruturas
musculares íntimas ao primeiro e quinto dedo (Figura 7). Os músculos próximos ao
98
Universidade Técnica de Lisboa
FACULDADE DE MOTRICIDADE HUMANA
v
v
B
A
v
C
v
D
Figura 11. A – Músculo grande dorsal; B – Músculo grande dentado (apenas visíveis as
digitações musculares nas costelas); C – Músculo reto do abdómen; D – Oblíquo externo.
v
v
v
v
F
C
v
E
A
B
v
D
Figura 12. A - Grande Dorsal; B – Músculo grande dentado (apenas visivel as digitações musculares nas costelas); C – Músculo grande reto do abdómen; D - Músculo grande oblíquo; E – Umbigo;
F – Linha branca.
Na região posterior do tronco, junto à coluna vertebral lombar e dorsal, é possível palpar a camada superficial dos músculos da massa comum. Para a salientar,
coloca-se o sujeito de pé, solicita-se que produza a extensão da cabeça e, por trás do
102
Universidade Técnica de Lisboa
ANATOMIA DE SUPERFÍCIE
sujeito, coloca-se os polegares sobre a coluna lombar, fazendo-os deslizar no sentido
ascendente a partir do sacro (Figura 14). Estes músculos têm parte da sua origem
nas cristas ilíacas (Figura 13). Estas localizam-se na cintura pélvica, podendo ser
palpadas com o sujeito de pé, virado de frente para o observador, e colocando as
mãos de cada lado da bacia, de forma a que os polegares acompanhem uma região
óssea curva, que se estende desde a espinha ilíaca ântero-superior até à espinha
ilíaca póstero-superior dos ossos ilíacos (Figuras 13 e 14). Estas espinhas ilíacas
identificam-se, respetivamente, acompanhando o contorno das cristas ilíacas anterior
e posteriormente. A espinha ilíaca póstero-superior, em alguns sujeitos, é difícil de
identificar na posição de pé. Nestas situações, poderemos palpar na posição de decúbito lateral ou sentado, com a coxa em flexão, com os dedos na porção posterior da
crista ilíaca e deslizando posteriormente até esta acabar numa eminência óssea.
v
A
B
v
v
C
v
D
Figura 13. A – Umbigo; B – Crista ilíaca; C – Espinha ilíaca ântero-superior; D – Grande trocânter.
Com o sujeito em pé e de costas para o observador, e localizando o ponto
médio de uma linha imaginária entre as espinhas posteriores, identifica-se o limite
superior da crista sagrada. A partir deste local, seguindo um trajeto distal, é possível
palpar as proeminências da crista do sacro (Figura 14). Estes acidentes ósseos da
região sagrada são parte do local de inserção do músculo grande glúteo (Figura 14).
Considerando que a sua origem e inserção são de difícil palpação, os seus contornos
podem ser delimitados usando referências ósseas, tais como: a linha imaginária que
une o cóccix e a tuberosidade isquiática, a qual define o limite inferior, e a espinha ilíaca póstero-superior que permite identificar o bordo superior. Para evidenciar o ventre
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
103
FACULDADE DE MOTRICIDADE HUMANA
C
v
v
A
v
D
G
v
v
v
v
E
B
v
F
H
v
I
Figura 20. A – Ventre muscular do tibial anterior; B – Bordo anterior da tíbia; C – Músculos longo
e curto peroniais laterais (na face externa da perna); D – Maléolo interno ou tibial; E – Maléolo
externo ou peronial; F – Tendão distal do peronial anterior; G – Tendão distal do tibial anterior;
H – Ponto ântero-externo do contacto do pé com o solo; I – Diáfise do 5.º metatársico.
v
v
A
B
v
v
C
D
v
v
F
v
v
E
v
v
G
v
F
Figura 21. A – Maléolo interno ou tibial; B – Maléolo externo ou peronial; C – Tendão distal do
peronial anterior; D – Tendão distal do tibial anterior; E – Tendão distal do longo extensor do dedo
grande do pé; F – Ponto ântero-externo do contacto do pé com o solo; G – Tendões distais do
extensor comum dos dedos; H – Articulação metacárpico-falângica do primeiro dedo.
na face externa do pé. Acompanhando o seu bordo externo no sentido próximo-distal,
encontra-se a saliência correspondente à cabeça do 5.º metatársico, e logo a seguir
a 5.ª articulação metatarso-falângica. Numa porção mais distal do pé, encontramos
as articulações interfalângicas proximais e distais. Fixando com uma das mãos
110
Universidade Técnica de Lisboa
ANATOMIA DE SUPERFÍCIE
a 1.ª falange e com a outra mão mobilizando a 2.ª falange, distingue-se a articulação
interfalângica proximal, e fixando a 2.ª falange e mobilizando a 3.ª, evidencia-se a
articulação interfalângica distal.
Na região plantar do pé, com o sujeito na mesma posição, destacam-se três importantes locais de apoio que estabelecem o contacto direto do pé com o solo (Figura
22): o ponto posterior, que se localiza na extremidade posterior, junto à face inferior
do calcâneo; o ponto ântero-interno, correspondente à cabeça do 1.º metatársico; e
o ponto ântero-externo na cabeça do 5.º metatársico. Estes pontos tendem a produzir entre si três arcos plantares que podem ser palpados (Figura 22): o anterior, percorrendo a linha que une as cabeças do 1.º ao 5.º metatársico; o interno, percorrendo
a linha que une a extremidade posterior do calcâneo e a cabeça do 1.º metatársico (o
ponto mais elevado do arco corresponde à articulação entre o 1.º cuneiforme e o 1.º
metatársico); e o externo, que une a extremidade posterior do calcâneo e a cabeça
do 5.º metatársico. Este arco é menos pronunciado do que o arco plantar interno.
v
v
v
v
v
v
v
C
F
v
v
D
B
v
v
A
v
E
Figura 22. A – Ponto ântero-externo do contacto do pé com o solo; B – Ponto ântero-interno do
contacto do pé com o solo; C – Ponto posterior do contacto do pé com o solo; D – Arco plantar
externo; E – Arco plantar anterior; F – Arco plantar interno.
Bibliografia Complementar Recomendada
Pezarat-Correia, P., & Espanha, M. (2010). Aparelho locomotor – Volume 1: Anatomofisiologia dos
sistemas nervoso, osteoarticular e muscular. Lisboa: Edições FMH.
Valerius, K.P., Frank, A., Kolster, B.C., Hirsh, M.C., Hamilton, C., & Lafont, E.A. (2005). O livro dos
músculos: Anatomia funcional dos músculos do aparelho locomotor. São Paulo: Manole.
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
111
Análise Funcional da Musculatura Humana
Participação Muscular por Movimento Articular
A(s) ação(ões) anatómica(s) de um músculo corresponde(m) ao(s) movimento(s)
articular(es) que a sua ação concêntrica produz quando o corpo se encontra em posição descritiva anatómica e sem considerar o efeito da ação da força da gravidade. O
conhecimento das ações anatómicas dos diferentes grupos musculares1 permite uma
base de trabalho para a análise cinesiológica e para o domínio das técnicas elementares de solicitação de um determinado músculo. Com base nesse conhecimento, neste
capítulo serão identificados os grupos musculares agonistas dos diferentes movimentos corporais. Sempre que se justifique, distinguiremos entre músculos agonistas principais e músculos agonistas secundários, com base no exposto no segundo capítulo
deste livro.
Para definir os grupos musculares que intervêm em cada um dos movimentos articulares, é necessário considerar todos os músculos que, atravessando essa
articulação, apresentam uma linha de ação de acordo com o sentido do movimento.
Dentro desse grupo de músculos, o grau de participação de cada um dos músculos
que concorre para a mesma ação depende principalmente dos seguintes fatores:
i) Volume muscular: músculos com maior volume, i.e. com maior área fisiológica de secção transversal, tendem a ter maior participação em relação a
outros menos volumosos;
ii) Relação entre a localização do músculo e a articulação: quanto mais alinhada estiver a linha de ação do músculo com o eixo correspondente ao sentido
do movimento, maior será a sua participação;
iii) Braço de momento do músculo, i.e. distância perpendicular mínima medida
entre o ponto de inserção do músculo e o eixo de rotação da articulação: um
músculo com um braço de momento superior tem maior vantagem mecânica e produz maior momento de força no movimento.
__________________________
1
Esse conhecimento é abordado no Volume 1 desta coleção (Pezarat-Correia & Espanha, 2010).
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
113
FACULDADE DE MOTRICIDADE HUMANA
Estas são as principais variáveis que influenciam o grau de participação relativa de cada um dos músculos de um determinado grupo de agonistas de um movimento. Há outros fatores que também têm influência, como o tipo de fibras que constitui o
músculo, o ângulo de penação das suas fibras, as características dos seus tendões e
o número de articulações que o músculo atravessa.
É importante acrescentar que, quando procuramos analisar a participação muscular no movimento em tarefas motoras mais ecológicas, é necessário considerar alguns
desvios a este comportamento mais elementar da musculatura humana, que podem
justificar que determinado músculo participe em ações que não estavam integradas nas
suas ações anatómicas principais. Por essa razão, a simples memorização das ações
que um músculo produz não é condição suficiente para o profissional que tem que realizar análises cinesiológicas aplicadas a contextos reais. Para além desse conhecimento
de base, é fundamental a capacidade de análise de cada situação e da forma como
durante um movimento se altera a linha de ação de cada músculo em relação ao eixo
articular onde atua e aos efeitos que sofre sob a influência das forças da gravidade.
Nos pontos seguintes serão caracterizados os músculos intervenientes nos
movimentos dos diversos segmentos corporais.
Tronco
No tronco, devem ser considerados os movimentos de extensão, flexão, flexão
lateral e rotação.
Os músculos extensores do tronco localizam-se posteriormente à coluna vertebral. Os agonistas principais são os músculos da massa comum (Figura 1) e os
interespinhosos (Figura 2). Dois grandes músculos que se localizam à superfície da
região posterior do tronco, o grande dorsal e o trapézio, são músculos agonistas auxiliares. Apresentando a sua ação principal no membro superior, em cujos ossos se
inserem, têm uma intervenção importante na extensão da coluna, quando esta é realizada a velocidade elevada ou contra uma resistência de intensidade considerável.
Na flexão do tronco participam dois grupos de músculos, os músculos da parede
ântero-lateral do abdómen e os músculos flexores da coxa. Estes últimos atuam com origem e inserção invertida. A participação muscular na flexão do tronco pode ser dividida em
três fases. Numa primeira fase do movimento, o agonista principal é o reto do abdómen
(Figura 3) e os oblíquos externo e interno são agonistas secundários. Estes músculos aproximam a caixa torácica da bacia, promovendo a flexão da coluna dorsal. Segue-se a flexão
da coluna lombar, que é produzida por uma das porções do psoasilíaco, o grande psoas.
Numa fase final, a flexão do tronco deve-se à inclinação anterior da bacia, envolvendo a
114
Universidade Técnica de Lisboa
ANÁLISE FUNCIONAL DA MUSCULATURA HUMANA
v
v
v
3
1
4
v
2
Figura 1. O epiespinhoso (1) e os músculos da massa comum como o longo dorsal (2), o iliocostal (3) e o multífidos (4) são músculos que atuam na extensão do tronco de uma forma global,
atuando nas diferentes regiões da coluna em simultâneo.
v
2
4
v
v
1
v
3
Figura 2. Os músculos interespinhosos são agonistas da extensão do tronco. Ao contrário dos
músculos da massa comum, estes músculos atuam de uma forma segmentar em cada par de
vértebras. Na figura, estão representados os músculos interespinhosos das regiões cervical (1) e
lombar (2) e os músculos intertransversários das regiões cervical (3) e lombar (4).
articulação coxofemoral, promovida pelos músculos que têm origem na parte anterior da
bacia: o reto femoral, o ilíaco, o costureiro e o tensor da fáscia lata.
A flexão lateral do tronco é produzida pela contração homolateral dos músculos quadrado dos lombos, psoasilíaco, oblíquo externo, oblíquo interno e músculos
da massa comum. O transverso do abdómen e os músculos intertransversários são
agonistas secundários.
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
115
FACULDADE DE MOTRICIDADE HUMANA
v
1
v
2
Figura 8. O grande dorsal (1) e o deltoide posterior (2)
são os mais importantes agonistas da extensão do braço.
Na adução do braço intervêm como agonistas principais o grande dorsal, o
grande peitoral, o grande redondo e o coracobraquial (Figuras 8, 9, 11 e 12). A curta
1
v
2
v
porção do bicípite braquial é agonista secundário.
Figura 9. Os principais agonistas da flexão do braço são o deltoide anterior (1)
e a porção clavicular do grande peitoral (2).
120
Universidade Técnica de Lisboa
ANÁLISE FUNCIONAL DA MUSCULATURA HUMANA
O agonista principal da abdução do braço é o deltoide, com destaque para a
sua porção média, por apresentar a linha de ação mais favorável (Figura 10). O supraespinhoso é agonista secundário.
v
v
1
2
Figura 10. O agonista principal da abdução do braço é o deltoide (1).
O supraespinhoso é agonista auxiliar (2).
A abdução horizontal do braço é produzida pelo deltoide posterior, grande dorsal, grande redondo, infraespinhoso e pequeno redondo (Figuras 8 e 12). A longa
porção do tricípite braquial é agonista secundário.
São agonistas da adução horizontal do braço o deltoide anterior, o grande peitoral e
o coracobraquial (Figuras 9 e 11). A curta porção do bicípite braquial é agonista secundário.
A rotação interna do braço é um movimento onde se consegue desenvolver
elevado momento de força, o que se deve ao número de músculos envolvidos e à
capacidade contráctil de alguns deles. São agonistas da rotação interna do braço o
grande peitoral, o deltoide anterior, o grande dorsal, o subescapular e o grande redondo (Figuras 9, 11 e 12).
O momento de força da rotação externa do braço é consideravelmente menor
do que na rotação interna, porque depende apenas de três músculos de menor dimensão: o deltoide posterior, o infraespinhoso e o pequeno redondo (Figuras 8 e 12).
Antebraço
No antebraço consideraremos os movimentos de flexão, extensão, supinação
e pronação.
Os agonistas principais da flexão do antebraço são o bicípite braquial, o braquial anterior e o braquiorradial (Figura 13). O bicípite braquial apresenta a sua participação máxima quando a flexão é realizada com o antebraço em supinação, enquanto
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
121
FACULDADE DE MOTRICIDADE HUMANA
2
1
Figura 16. Na anteversão da bacia participam dois grupos de músculos: os músculos da
massa comum (1) e os músculos flexores da coxa, dos quais se destaca o psoasilíaco (2).
Na retroversão da bacia devemos também distinguir dois grupos de músculos
agonistas (Figura 17). Os músculos da parede ântero-lateral do abdómen – transverso,
oblíquo interno, oblíquo externo, grande reto – atuam nos bordos superior e anterior
do osso ilíaco, enquanto os músculos extensores da coxa promovem a retroversão,
atuando na parte posterior da bacia: grande glúteo, bicípite femoral, semimembranoso
e semitendinoso.
1
2
3
4
Figura 17. A retroversão da bacia é produzida pelos músculos da parede ântero-lateral do abdómen, como o oblíquo externo (1), o oblíquo interno (2) e o transverso do abdómen (3), e pelos
músculos extensores da coxa, com destaque para o grande glúteo (4).
126
Universidade Técnica de Lisboa
ANÁLISE FUNCIONAL DA MUSCULATURA HUMANA
Coxa
A articulação coxofemoral é uma articulação triaxial que confere à coxa capacidade para realizar movimentos nos três planos anatómicos, permitindo os movimentos de extensão, flexão, adução, abdução, rotação interna e rotação externa.
Os músculos agonistas principais da flexão da coxa – o psoasilíaco, o reto
femoral, o costureiro, o tensor da fáscia lata e o pequeno glúteo – passam à frente da
v
2
3
v
1
v
articulação coxofemoral (Figura 18). O pectíneo é um agonista secundário.
v
4
Figura 18. As duas porções do psoasilíaco, o grande psoas (1) e o ilíaco (2),
o reto femoral (3) e o costureiro (4) são agonistas principais da flexão da coxa.
Na extensão da coxa, os agonistas principais localizam-se posteriormente: o grande glúteo, a longa porção do bicípite femoral, o semimembranoso e o semitendinoso
(Figura 19). O médio glúteo, através dos seus feixes posteriores, é agonista secundário.
A abdução da coxa é realizada por músculos que se localizam externamente à
articulação coxofemoral: os três glúteos (médio, pequeno e grande), o tensor da fáscia
lata e o costureiro.
Os agonistas da adução da coxa localizam-se na região interna da coxa e têm origem na púbis: os três adutores (pequeno, médio e grande), o pectíneo e o reto interno.
Na rotação externa da coxa existe um elevado número de músculos agonistas: o
grande glúteo, o psoasilíaco, os adutores, o costureiro e todos os músculos pelvi-trocantéricos (piramidal da bacia, obturador interno, obturador externo, gémeo superior, gémeo
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
127
FACULDADE DE MOTRICIDADE HUMANA
Pé
No pé, descrevem-se os músculos que produzem os movimentos de flexão
plantar, flexão dorsal, inversão e eversão.
O momento de força produzido na flexão plantar é consideravelmente superior
ao desenvolvido na flexão dorsal, devido ao maior número e volume de músculos preparados para a função de propulsão de todo o corpo contra a força gravítica. Os agonistas
da flexão plantar são todos os músculos da perna cujos tendões passam posteriormente
ao eixo que une os dois maléolos. Merece destaque principal a grande capacidade do
agonista principal da flexão plantar, o tricípite sural, através das suas três porções, os
gémeos interno e externo e o solear (Figura 22). Os gémeos, mais ricos em fibras do
tipo 2, são mais importantes quando a flexão plantar é realizada a velocidades mais elevadas e em situações dinâmicas. O solear, mais bem apetrechado de fibras resistentes
do tipo 1, está mais adaptado a produzir contrações prolongadas, sendo mais importante para a manutenção da posição de flexão plantar. Dado que os gémeos são músculos
biarticulares, a participação relativa das diferentes porções do tricípite sural na flexão
plantar depende também da angulação do joelho. Com o joelho em flexão superior a
90º, a participação dos gémeos na flexão plantar é mais reduzida, passando o solear a
2
v
v
v
1
1
v
v
3
2
Figura 22. O principal músculo agonista da flexão plantar é o tricípite sural. Das suas três porções, os gémeos interno (1) e externo (2) são mais importantes quando a flexão plantar é realizada em situações dinâmicas, enquanto o solear (3) é mais importante quando é necessário
manter a posição de flexão plantar.
130
Universidade Técnica de Lisboa
Participação Muscular
em Diferentes Ações Motoras
Princípios de Análise da Participação Muscular em Ações Motoras
A capacidade de analisar a participação muscular em ações motoras diversificadas é uma competência importante para qualquer profissional cujo objeto de estudo
se centre no movimento humano, independentemente do envolvimento em que este
se encontre inserido.
Neste capítulo será abordado um conjunto de ações motoras selecionadas
como as mais representativas da atividade física humana. No entanto, mais importante do que conhecer a participação muscular num conjunto de gestos, é desenvolver a
capacidade de análise da participação muscular de qualquer ação motora, independentemente do contexto em que seja realizada e das variações a que seja sujeita.
Os tempos atuais exigem aos profissionais que trabalham com o movimento humano
uma grande versatilidade e capacidade adaptativa. Assim, mais importante do que
memorizar um padrão de participação muscular numa determinada ação motora, é
ser capaz de determinar esse padrão, na sua forma geral mas também nos seus aspetos mais específicos, em qualquer situação.
A análise da participação muscular no movimento tem por base o domínio de um
conjunto de conhecimentos biológicos: anatomofisiologia das estruturas anatómicas diretamente envolvidas na execução motora (sistemas ósseo, articular e muscular esquelético),
mecanismos de controlo e coordenação neuromuscular, fundamentos biomecânicos do movimento humano. Mas o domínio desses conhecimentos deve ser colocado ao serviço de
uma observação e sistematização do raciocínio, através de um método dedutivo de análise
qualitativa do movimento, no qual devem ser atendidos alguns passos, como os seguintes:
i)
Dividir a ação motora em fases, tendo em conta que em cada uma deverá
ser possível identificar um início e um fim, de acordo com o movimento
articular dos segmentos corporais envolvidos;
ii) Identificar as articulações diretamente implicadas na ação motora e os respetivos movimentos articulares em cada fase;
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
133
PARTICIPAÇÃO MUSCULAR EM DIFERENTES AÇÕES MOTORAS
v
5
v
3
v
4
v
2
v
1
6
v
7
v
11
v
8
v
v
12
9
10
Figura 1. Representação de alguns dos principais músculos antigravíticos na posição bípede: porções da massa comum, como o multífidos (1), o iliocostal (2) e o longo dorsal (3), o epiespinhoso (4),
o grande complexo (5), o grande glúteo (6), o semitendinoso (7), o semimembranoso (8), o bicípite
femoral (9), o vasto interno (10) e o vasto externo (11) do quadricípite crural e o solear (12).
para a estabilidade da região lombar. Estes músculos ativam com um padrão de cocontração previamente à produção de tarefas dinâmicas, fornecendo a base estável aos
músculos que têm uma ação poderosa na produção de movimento.
A ação destes músculos é complementada por músculos mais pequenos e que
têm uma ação segmentar e mais localizada em cada par de vértebras, como os músculos interespinhosos, os músculos intertransversários e os músculos rotadores da
massa comum. Com uma diminuta área fisiológica de secção transversal e um braço
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
135
PARTICIPAÇÃO MUSCULAR EM DIFERENTES AÇÕES MOTORAS
é o principal músculo agonista e os oblíquos são agonistas auxiliares. O início da terceira
fase corresponde à saída da coluna lombar do solo, a que se segue a anteversão da
bacia (Figura 4-D). Nessa fase, até por terem atingido o seu máximo encurtamento, os
músculos da parede ântero-lateral do abdómen são substituídos pelos músculos flexores
da coxa que passam a ser os principais agonistas do movimento. Estes músculos atuam
A
B
C
D
Figura 4. Fases do exercício de sit-up. A: Posição de partida com musculatura relaxada. B: Flexão
da coluna cervical e elevação da cabeça. Nesta fase, o músculo esternocleidomastóideo é o principal
agonista e a fixação das suas origens é garantida pela contração estática dos músculos da parede ântero-lateral do abdómen que estabilizam o tórax. C: Flexão da coluna dorsal produzida pelos músculos
da parede ântero-lateral do abdómen, com destaque para o reto do abdómen e para o oblíquo externo.
D: A partir do instante em que a coluna lombar sai do solo, a flexão do tronco deve-se aos músculos
flexores da coxa que atuam com origem e inserção invertida. O primeiro desses músculos a intervir é
o grande psoas, seguindo-se os músculos com origem na bacia, como o reto femoral. Os músculos
abdominais mantêm-se contraídos mas agora com uma ação principalmente estabilizadora.
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
141
FACULDADE DE MOTRICIDADE HUMANA
Figura 7. Quando a flexão do tronco é combinada com rotação para o lado esquerdo, a rotação
deve-se à contração do oblíquo externo direito e do oblíquo interno esquerdo.
Um dos exercícios mais utilizados com esse propósito é o leg-raise, que consiste na elevação e descida controlada dos membros inferiores com o sujeito deitado
no solo na posição de decúbito ventral (Figura 8). Os músculos que nesse exercício
atuam na coxa são os flexores da coxa. Estes músculos são solicitados em ação dinâmica excêntrica na fase de descida, travando o movimento dos membros inferiores, e
em ação dinâmica concêntrica na fase de elevação dos membros inferiores. Em qualquer das fases, os músculos flexores da coxa produzem força na sua origem, puxando
a bacia para anteversão e tendendo a aumentar a lordose da coluna lombar. Para que
A
B
Figura 8. Durante a descida controlada dos membros inferiores, os músculos flexores da coxa, como
o reto femoral, são solicitados em ação excêntrica. A sua contração gera uma força na sua origem
que tende a rodar a bacia para anteversão. A ação estática dos músculos da parede ântero-lateral do
abdómen, como o reto abdominal e o transverso, contraria essa tendência, estabilizando a bacia em
retroversão e mantendo a coluna lombar encostada ao solo (A). Se a força dos músculos da parede
ântero-lateral do abdómen não for suficiente para anular a força exercida pelos flexores da coxa na
bacia, esta desloca-se para anteversão, verificando-se aumento da lordose lombar (B).
144
Universidade Técnica de Lisboa
FACULDADE DE MOTRICIDADE HUMANA
A
B
RF
v
v
RF
Figura 16. Remate de futebol. No final da fase preparatória (A) verifica-se alongamento dos músculos
agonistas da fase principal que termina no contacto com a bola (B). Estão representados os principais
agonistas da flexão da coxa (psoasilíaco e reto femoral) e da extensão do joelho (quadricípite crural). Na
fase principal, o reto femoral (RF) é agonista nas duas articulações que atravessa.
contração. Conforme referido anteriormente, um dos aspetos que caracteriza as ações
de saltar é o facto de os músculos biarticulares atuarem simultaneamente como agonistas numa das articulações e antagonistas na outra, o que determina que a variação
de comprimento do músculo durante a ação seja muito reduzida. As ações motoras em
que os músculos biarticulares são simultaneamente agonistas nas duas articulações
que atravessam, como acontece no remate de futebol, são menos frequentes.
No remate de futebol os músculos podem ser solicitados num regime semelhante a um CMAE. O alongamento prévio a que são sujeitos durante a fase preparatória pode ser utilizado, se o intervalo entre o final dessa fase e o início da fase
principal for suficientemente curto, para potenciar a força muscular desenvolvida na
ação concêntrica para acelerar o membro inferior em direção à bola2. Isto é ainda mais
evidente para o reto femoral, que é sujeito a um considerável alongamento na fase
preparatória, dado ser alongado nas duas articulações que atravessa.
__________________________
2
156
Bober e colaboradores (1987) verificaram que a velocidade do joelho no remate pode aumentar mais de 20% quando este é
executado em CMAE, em comparação com uma execução em que a extensão do joelho depende apenas de contração concêntrica dos músculos agonistas.
Universidade Técnica de Lisboa
PARTICIPAÇÃO MUSCULAR EM DIFERENTES AÇÕES MOTORAS
manutenção da proximidade entre as duas superfícies articulares da gleno-umeral, o que é
particularmente importante quando com o braço se realizam ações indutoras de separação
entre essas superfícies como acontece, por exemplo, durante a elevação do braço acima
da horizontal. Se, nessas condições, os músculos da coifa dos rotadores não cumprirem
convenientemente a sua função puxando a cabeça do úmero para baixo e para dentro, o
movimento de rotação da cabeça do úmero é acompanhado de translação para cima, com
consequente compressão das estruturas que se localizam no espaço subacromial, entre a
cabeça do úmero e o acrómio (os tendões do supraespinhoso e da longa porção do bicípite
braquial e a bolsa subacromial), podendo contribuir para um processo inflamatório e um
quadro clínico conhecido por conflito subacromial (subacromial impingement)4.
Dos músculos da coifa dos rotadores, dois músculos – infraespinhoso e pequeno redondo – merecem uma referência especial. A cápsula articular da articulação
gleno-umeral não é provida de ligamentos posteriores. Os tendões destes músculos,
ao reforçar posteriormente a cápsula articular, comportam-se como ligamentos ativos, isto é, ligamentos cuja tensão é suscetível de regulação em função do nível de
contração muscular. Assim, são elementos vitais para a estabilidade da articulação,
contribuindo decisivamente para a travagem de movimentos do braço dirigidos para
3 2 4
v
1
v
v
v
v
6
v
5
Figura 18. O exercício de abdução horizontal do braço posicionado em rotação externa é uma forma eficaz de fortalecer os músculos rotadores externos do braço, como o deltoide posterior (1), o
infraespinhoso (2) e o pequeno redondo (3). Este exercício apresenta também um grau elevado de
solicitação dos músculos com ação na omoplata, o trapézio (4), os romboides (5) e o angular da
omoplata (6). Estes músculos intervêm durante a maior parte do exercício em ação estática para fixar
a omoplata, estabilizando a origem dos músculos agonistas no movimento do braço. Se a amplitude
do movimento ascendente do braço for muito pronunciada, ocorre adução das omoplatas e, nesse
caso, os mesmos músculos são solicitados em ação dinâmica concêntrica.
__________________________
4
Exercícios visando o desenvolvimento dos músculos da coifa dos rotadores são propostos em Durall e colaboradores (2001).
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
159
PARTICIPAÇÃO MUSCULAR EM DIFERENTES AÇÕES MOTORAS
A
B
v
v
2
v
1
3
Figura 22. A prensa de ombros, exercício também conhecido por supino, é um exemplo de uma
ação de empurrar produzida em cadeia aberta. A – Prensa de ombros executada com pega fechada: os músculos solicitados ao nível da articulação gleno-umeral são os flexores do braço, como
a porção clavicular do grande peitoral (1) e o deltoide anterior (2), e os extensores do cotovelo,
principalmente o tricípite braquial (3). B – Prensa de ombros executada com pega aberta: a grande
diferença é que o padrão de movimento da gleno-umeral passa a ser adução horizontal, o que
promove uma solicitação da totalidade do grande peitoral. Os músculos da parede ântero-lateral do
abdómen são solicitados em ação estática em ambos os tipos de execução, de forma a estabilizar
a grelha costal, potenciando a intervenção do grande peitoral.
4
v
v
v
v
5
2
v
1
3
Figura 23. O exercício de push-up, normalmente designado por “flexões de braços”, é um exemplo de uma ação de empurrar realizada em cadeia fechada. Com as mãos colocadas à largura
dos ombros, os músculos solicitados na articulação gleno-umeral são os flexores do braço, como
a porção clavicular do grande peitoral (1) e o deltoide anterior (2). Quando o exercício é realizado
com as mãos mais afastadas, o grande peitoral passa a ser solicitado na sua totalidade. No cotovelo, o principal músculo interveniente é o tricípite braquial nas suas três porções: longa porção
(3), vasto externo (4) e vasto interno (5).
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
165
PARTE III – ADAPTAÇÕES DO APARELHO LOCOMOTOR À
ATIVIDADE FÍSICA E À INATIVIDADE
ADAPTAÇÕES MUSCULARES À ATIVIDADE FÍSICA E À INATIVIDADE
Pedro Pezarat Correia e Paulo Armada da Silva
ADAPTAÇÕES NEURAIS À ATIVIDADE FÍSICA E À INATIVIDADE
Pedro Pezarat Correia
ADAPTAÇÕES DO TECIDO CONJUNTIVO À ATIVIDADE FÍSICA E À INATIVIDADE
Margarida Espanha, António Veloso, Augusto Gil Pascoal e Paulo Armada da Silva
Adaptações Musculares
à Atividade Física e à Inatividade
As alterações que ocorrem no músculo esquelético em resposta ao treino
podem ser sistematizadas em dois tipos de adaptação: 1) alteração do volume do
músculo e 2) remodelação muscular. A alteração de volume do músculo consiste no
aumento ou diminuição da massa do músculo, sem alterar de forma significativa a
proporção relativa dos tecidos que a compõem. Ao contrário da adaptação anterior, a
remodelação muscular não implica alteração significativa da massa muscular ou do
diâmetro das fibras musculares e é caracterizada por alterações funcionais do músculo, que tipicamente aumentam a resistência muscular à fadiga.
Adaptações do Volume Muscular
O treino de força aumenta a capacidade de produção de força, a que se pode
associar o aumento da área do músculo e do seu volume. No sentido inverso, a redução de utilização de um músculo provoca atrofia muscular, isto é, perda significativa
de massa muscular. No homem, estudos longitudinais com aplicação de programas
de treino de duração igual ou inferior a seis meses em sujeitos previamente sedentários têm revelado aumentos da massa muscular entre 9% e 23%. Estes valores
correspondem aos indicados nos estudos com animais, mas são relativamente baixos
quando comparados com os valores medidos em indivíduos com um passado mais
longo de treino de força, como é o caso de culturistas, nos quais se observaram áreas
de secção cruzada de músculos do braço 76% superiores às do grupo de controlo
(MacDougall et al., 1984).
Atualmente sabe-se que o aumento da área de secção transversal do músculo
sujeito ao treino com cargas se deve fundamentalmente à hipertrofia, ou seja, ao aumento de diâmetro da fibra muscular. O aumento da quantidade de tecido conjuntivo
muscular contribui também para o aumento da massa muscular total. A hiperplasia muscular, isto é, o aumento do número de fibras musculares, terá no homem em particular,
e nos mamíferos em geral uma importância reduzida no aumento da massa muscular.
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
183
FACULDADE DE MOTRICIDADE HUMANA
são células da linhagem muscular, não totalmente diferenciadas e localizadas entre
o sarcolema e a membrana basal. Estas células são essenciais para o crescimento
muscular e para a regeneração deste tecido, sendo também importantes para o aumento da massa muscular.
Foi verificado que o número de células satélite e de mionúcleos é maior em
halterofilistas do que em indivíduos não treinados (Kadi et al., 1999a,b). No mesmo
sentido, estudos longitudinais mostraram aumento do número de células satélite em
resposta a um período de treino de 9 a 14 semanas (Kadi et al., 2004). Por outro lado,
o número de células satélite parece declinar com a idade, o que pode justificar em parte a menor hipertrofia muscular observada nos idosos (Kadi et al., 2004). Em suma, o
aumento de síntese proteica subjacente à hipertrofia das fibras musculares implica um
aumento do número de núcleos a partir das células satélite (Figura 2).
Figura 2. Proliferação de células satélite em resposta ao treino de força. O aumento do número
de células satélite leva a um aumento do número de núcleos e aumento de síntese proteica.
A miogénese, nomeadamente a que é desencadeada pelo treino de força, está
dependente da ação de fatores de crescimento, com destaque para a indução da proliferação das células satélite pelas isoformas musculares do IGF-I (IGF-I Ea e MGF,
respetivamente isoforma Ea do Insulin growth factor-I e mechano growth factor). Em
contraste, a miostatina, um membro da superfamília de proteínas TGF-β (transforming
growth factor-β), é um regulador negativo da proliferação e diferenciação das células
satélite, inibindo a progressão ao longo do ciclo celular.
190
Universidade Técnica de Lisboa
FACULDADE DE MOTRICIDADE HUMANA
Mecanismos envolvidos na hiperplasia
Após comprovada em animais (Gonyea et al., 1985; Kawakami et al., 1995), a
hiperplasia tem sido proposta como um dos possíveis mecanismos responsáveis pelo
aumento de volume do músculo humano em consequência do treino de força de alta
intensidade.
Existem dois potenciais mecanismos para explicar a hiperplasia. Por um lado,
a tensão excessiva, como a que acontece em contrações excêntricas, danifica as
fibras musculares, começando a sua regeneração com a proliferação de células satélite que originam novos mioblastos, através da miogénese. Outro mecanismo consiste
na divisão longitudinal das fibras estimuladas pelo treino intenso com cargas (fibre
splitting), com consequente hipertrofia das fibras daí resultantes.
Refira-se que é difícil comprovar a existência de hiperplasia no homem por
ação do treino. Por exemplo, a maior parte dos estudos realiza-se em músculos multipenados, sendo que mudanças nos ângulos das fibras podem dar lugar a erro na contagem das fibras. Por outro lado, os danos estruturais das fibras musculares obtidas
por biopsia e a dificuldade de quantificar o grau de retração do tecido tornam difícil
calcular com precisão o número total de fibras musculares in vivo. Acrescente-se, ainda, que os trabalhos experimentais que suportam a hiperplasia de forma inequívoca
foram realizados em aves e utilizando o alongamento como modelo de sobrecarga.
Por razões éticas e dificuldades metodológicas, o estudo desta problemática em seres
humanos vivos é muito difícil.
Mecanismos envolvidos na atrofia
Contrariamente ao treino e à sobrecarga mecânica, a inatividade muscular provoca atrofia muscular, isto é, a diminuição da massa muscular. Os mecanismos responsáveis pela atrofia muscular são múltiplos e implicam o aumento da degradação
proteica e a diminuição da síntese proteica, com consequente diminuição do tamanho
das fibras musculares. Paralelamente, ocorre diminuição do número de mionúcleos.
Estudos em modelo animal sugerem que o aumento da taxa de degradação proteica é
um mecanismo preponderante na atrofia muscular, por inatividade, mas o mesmo não
se comprova no homem (Marimuthu et al., 2011), onde a atrofia muscular parece mais
associada à redução acentuada da síntese proteica. Contudo, desconhecem-se os detalhes dos mecanismos celulares e moleculares responsáveis pela inibição da síntese
proteica em resultado da inatividade muscular. A miostatina, no entanto, parece ter um
papel relevante na atrofia muscular. A inatividade muscular aumenta a expressão deste
fator de transcrição, havendo aumento da quantidade de transcrito, tanto ao nível do
RNAm, como ao nível da proteína. Ao inibir tanto a miogénese como a síntese proteica
192
Universidade Técnica de Lisboa
FACULDADE DE MOTRICIDADE HUMANA
As adaptações nos sistemas transportadores da membrana celular da fibra
muscular também justificam a melhoria, através do treino, na regulação do equilíbrio ácido-base após o exercício, atrasando a instalação da fadiga. O treino promove
adaptações na regulação da concentração do ião H+ durante o exercício, o que tem
sido evidenciado no treino de resistência, no treino com exercícios de intensidade
elevada, após séries de repetições máximas, ou durante o treino de velocidade.
Um dos aspetos mais salientes da remodelação muscular é a alteração no metabolismo energético, no sentido de aumentar a capacidade do metabolismo oxidativo. Estas adaptações estão relacionadas com a quantidade de oxigénio que chega às
fibras musculares, com a capacidade de a fibra fixar o oxigénio (teor em mioglobina),
com uma melhor resposta por parte dos sistemas enzimáticos mitocondriais envolvidos nos processos oxidativos para utilizar esse oxigénio e com maior capacidade
de mobilizar as reservas energéticas obtidas a partir dos hidratos de carbono e dos
lípidos. Estas melhorias ocorrem em consequência de treino de características aeróbicas, tanto nas fibras do tipo 1 como nas fibras do tipo 2. No reverso da medalha, a
inatividade física é acompanhada de importantes alterações metabólicas no músculo,
que são em grande medida contrárias às que ocorrem em função do exercício. O músculo, que por várias razões não mantém uma atividade contráctil regular, sofre uma redução da capacidade oxidativa, reforçando o metabolismo glicolítico. O acamamento,
ou a permanência em meio com ausência de gravidade, faz diminuir a densidade de
mitocôndrias e o número de capilares que circundam as fibras musculares, ao mesmo
tempo que faz aumentar o número das enzimas envolvidas na glicólise. Os músculos
nestas condições produzem maior quantidade de ácido láctico, têm menor capacidade de produção de ATP, estão mais dependentes da glicose como fonte energética e
perdem resistência à fadiga.
Adaptações das proteínas contrácteis e dos tipos de fibras musculares
As primeiras células musculares aparecem entre as oito e as dez semanas de
vida fetal, antes de se estabelecer a inervação motora. No início, todas as fibras musculares são indiferenciadas. A diferenciação entre fibras rápidas e fibras lentas começa
cerca das 30 semanas de vida fetal, com um aumento grande das fibras do tipo 1, que
constituem cerca de 50% das fibras musculares à nascença. No entanto, por esta altura
a diferenciação é ainda pobre, com as várias fibras a possuírem características metabólicas semelhantes. As diferenças entre os tipos de fibras, e em particular a especialização metabólica, acentuam-se durante o primeiro ano de vida. Do primeiro ao sexto ano
de vida, verificam-se alterações importantes nas percentagens de fibras 2A e 2X que
196
Universidade Técnica de Lisboa
ADAPTAÇÕES MUSCULARES À ATIVIDADE FÍSICA E À INATIVIDADE
Plasticidade Muscular
A plasticidade muscular, tal como noutros tecidos, é em grande medida
função do turnover das proteínas. As proteínas celulares não são inertes,
estando em permanente renovação através dos processos de degradação e de síntese proteica. Do balanço final destes dois processos depende o aumento (hipertrofia) ou depleção (atrofia) do conteúdo proteico
das células e dos tecidos. Simultaneamente, a constante renovação das
proteínas possibilita a conversão entre isoformas e a alteração das características fenotípicas da fibra muscular. A adaptação neuromuscular
ao exercício é, assim, indissociável de dois aspetos fundamentais: por
um lado, das alterações do turnover proteico e, por outro, do tempo médio de vida das proteínas. Estas duas condições vão determinar até que
ponto e com que rapidez ocorrem mudanças na expressão fenotípica
de certo traço celular, por exemplo, na composição em isoformas das
cadeias pesadas da miosina, cuja transformação vai estar associada
à maior ou menor estabilidade das respetivas proteínas. No caso das
cadeias pesadas de miosina, o seu tempo médio de vida é de uma
semana, o que dá, desde logo, indicação da escala de tempo em que
podem ocorrer alterações significativas do conteúdo celular nestas isoformas. As variações no tempo médio de vida das proteínas e nas suas
taxas de síntese significam que a resposta ao conjunto de solicitações
funcionais, como no caso da adaptação ao exercício, terá tempos diferentes conforme o sistema de proteínas em questão. Existem sistemas de
proteínas que atingirão uma adaptação mais rápida, enquanto outros
necessitarão de um período de tempo mais longo para que se manifestem alterações importantes.
A transformação do fenótipo das proteínas contrácteis inclui também
alterações na composição das cadeias leves de miosina. A plasticidade
a este nível é igualmente elevada e parece acompanhar as alterações
registadas na expressão das isoformas da cadeia pesada da miosina.
Adaptações do sarcolema
A atividade muscular está dependente da manutenção das concentrações de
eletrólitos entre os dois lados da membrana, de modo a preservar a excitabilidade e propagabilidade do sarcolema. O exercício prolongado, por intermédio dos fluxos de sódio
e potássio associados à atividade contráctil, altera as concentrações destes eletrólitos
entre os dois lados do sarcolema, estando na origem da despolarização da membrana,
a que está associada a perda de excitabilidade e a redução da amplitude do potencial de
ação. Uma das alterações do equilíbrio do meio interno que tem lugar em resultado do
exercício é a chamada hipercalémia do exercício, ou seja, o aumento da concentração
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
199
FACULDADE DE MOTRICIDADE HUMANA
que realizamos, ao contrário das fibras do tipo 2X, que se contraem esporadicamente e
durante contrações de intensidade mais elevada mas de curta duração.
Adaptações metabólicas
Adaptações na capacidade de utilização de oxigénio
A maior parte dos conhecimentos sobre adaptação metabólica dizem respeito
à adaptação ao exercício de resistência. Em traços gerais, as adaptações metabólicas
do músculo, em virtude do treino de resistência, baseado em muitas repetições de
baixa intensidade, estão relacionadas com o aumento da capacidade do metabolismo
oxidativo dos músculos exercitados. Essa melhoria verifica-se nos três tipos de fibras
e é resultado de várias alterações, incluindo maior fluxo de oxigénio do sangue para
as mitocôndrias e maior capacidade destas para o utilizar.
O aumento da quantidade de oxigénio que se difunde do sangue para as mitocôndrias envolve, em primeiro lugar, um maior aporte sanguíneo e de oxigénio por
aumento do número de capilares. O aumento da capilarização melhora também a
capacidade para remover os produtos do catabolismo e o dióxido de carbono. Em
segundo lugar, o aumento da quantidade de mioglobina facilita a difusão do oxigénio
entre o sangue e as mitocôndrias. O exercício de características aeróbicas é igualmente responsável por uma maior capacidade de síntese de ATP com utilização do
oxigénio, devido ao aumento do número e tamanho das mitocôndrias e do teor em
enzimas necessário aos processos oxidativos. A par destas adaptações, regista-se
um declínio da capacidade glicolítica, com redução do número de enzimas da glicólise. Este conjunto de adaptações diminui a participação do metabolismo anaeróbio e
reduz a quantidade de lactato produzida para uma mesma intensidade de exercício.
Nos regimes de treino de força com apelo a contrações rápidas ou de elevada intensidade, a densidade mitocondrial permanece inalterada. Nestes casos verifica-se um
aumento de teor das enzimas responsáveis pelo metabolismo anaeróbio.
Adaptações no transporte e utilização da glicose
Os hidratos de carbono na forma de glicose constituem, juntamente com os
lípidos, a principal fonte energética do músculo esquelético durante o exercício. As
reservas corporais de glicose na forma de glicogénio são relativamente limitadas, encontrando-se cerca de 200g a 500g no músculo esquelético, 60g a 100g no fígado e
entre 15g e 20g em circulação no plasma sanguíneo e no espaço extracelular.
Durante a contração muscular, as fibras musculares fazem uso das suas reservas em glicogénio e da glicose em circulação. A proporção de utilização de glicose
endógena ou proveniente do plasma está dependente da intensidade e duração do
202
Universidade Técnica de Lisboa
Adaptações Neurais à Atividade Física e à Inatividade
As adaptações neurais consistem em adaptações nos diferentes níveis do SNC
implicados no controlo do movimento. Diferentes argumentos evidenciam a importância das adaptações neurais na melhoria da resposta do músculo em consequência
do processo de treino. O mais frequentemente invocado é que os ganhos de força
obtidos durante o treino são normalmente superiores aos aumentos verificados no
volume dos músculos, principalmente nas fases iniciais do processo de treino. Outro
argumento é a constatação de que o aumento de força em consequência do treino
não se verifica apenas no membro treinado, mas também no membro contralateral
não treinado. Outro tipo de evidência que suporta o potencial das adaptações neurais
ao treino de força prende-se com os ganhos obtidos na força isométrica máxima em
sujeitos que treinaram com contrações voluntárias máximas imaginadas.
Na primeira parte deste capítulo serão identificados e caracterizados três tipos
de adaptações neurais: adaptações nos processos de coordenação intramuscular,
adaptações nos processos de coordenação intermuscular e adaptações nos mecanismos reflexos de controlo do movimento.
Como foi abordado no segundo capítulo, a eletromiografia (EMG) é uma técnica de registo da atividade elétrica do músculo intimamente associada ao estudo da
função neuromuscular. A intensidade do sinal EMG de superfície reflete a quantidade
de estimulação que o SNC fornece ao músculo, proporcionando um indicador importante para avaliar as adaptações neurais ao treino de força. Na segunda parte deste capítulo serão abordados e explicados contributos da investigação realizada com
EMG para o estudo aprofundado das adaptações neurais nos seus diferentes níveis.
Adaptações na Coordenação Intramuscular
Quando um sujeito previamente sedentário inicia um programa de treino de força, nos dois meses iniciais de treino o aumento de força deve-se essencialmente a um
aumento na capacidade de o SNC ativar o músculo. Essas adaptações neurais ocorrem antes de se verificar alteração significativa do volume do músculo. As adaptações
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
207
FACULDADE DE MOTRICIDADE HUMANA
cilitation – PNF). Estas técnicas, utilizadas no âmbito do treino de flexibilidade mais
avançado, baseiam-se em estratégias de estimulação dos recetores propriocetivos
que visam desencadear os efeitos reflexos promotores de maior relaxamento e, logo,
de maior alongamento do músculo.
Exemplos de Facilitação Neuromuscular Propriocetiva
As duas técnicas mais utilizadas no âmbito dos métodos PNF baseiam-se na
inibição autogénica e na inervação recíproca. Na técnica que se baseia na
inibição autogénica (Figura 2), um músculo é alongado até ao ponto em que
a amplitude adicional de alongamento é limitada pela sua própria tensão.
Nesse ponto produz-se uma contração isométrica gradual de cerca de
10 segundos, o que determinará logo em seguida um maior relaxamento
do músculo, através do reflexo miotático inverso. Essa fase de menor tensão é aproveitada para se atingir um maior alongamento, que deverá
ser mantido por 20 a 30 segundos. Outra técnica PNF tem por base o
processo de inervação recíproca. Imaginemos que os músculos extensores da coxa são colocados passivamente numa determinada posição de
alongamento. Em seguida, através da contração nos músculos flexores,
alonga-se suavemente os extensores para nova posição. A contração dos
músculos flexores facilitará o relaxamento do músculo a alongar, através
do processo de inervação recíproca. É também com base na utilização
dos processos de inervação recíproca que é possível justificar fisiologicamente que a realização de uma contração antagonista, mesmo a anteceder a ação do músculo agonista, possa ser uma estratégia eficaz para
potenciar a força de contração deste (Fleck, 1995).
Contributos da Eletromiografia para o Estudo das Adaptações Neurais
Contributos da eletromiografia para o estudo das adaptações na coordenação intramuscular
A medição da intensidade de atividade eletromiográfica (EMG) gerada no músculo durante a contração representa uma indicação preciosa sobre a quantidade de
ativação neural fornecida ao músculo num determinado momento. Por isso, a EMG
tem sido amplamente utilizada para inferir sobre as adaptações neurais ao processo
de treino da força. Os estudos de Hakkinen e colaboradores (1983, 1985a,b,c, 1987,
1996, 1998) forneceram uma contribuição experimental fundamental sobre a importância relativa que assumem, ao longo do processo de treino da força, as adaptações
neurais e hipertróficas. Os seus resultados mostraram que, quando um principiante
iniciava um programa de treino de força, nos dois meses iniciais de treino o aumento
214
Universidade Técnica de Lisboa
ADAPTAÇÕES NEURAIS À ATIVIDADE FÍSICA E À INATIVIDADE
A
S2
B
S2
S1
S1
C
S2
D
S2
S1
S1
Figura 2. Técnica PNF baseada na inibição autogénica. A – Um alongamento passivo dos músculos posteriores da coxa do sujeito (S1), como o semitendinoso, é produzido por um ajudante (S2). O
alongamento vai estimular o FNM e aumentar a atividade do reflexo miotático e, consequentemente, o tónus dos músculos alongados. Esse aumento de tensão limita o alongamento. B – Quando
o sujeito (S1) atinge o máximo de alongamento dos músculos posteriores da coxa, produz durante
breves segundos uma contração isométrica intensa desses músculos, fazendo força no sentido
da extensão da coxa. O ajudante (S2) oferece resistência com a mão. C – A contração intensa
dos músculos posteriores da coxa estimula os OTG desses músculos, ativando o reflexo miotático
inverso e promovendo uma redução de tensão muscular. D – Essa redução de tensão pode ser
aproveitada para aumentar um pouco o grau de alongamento dos músculos posteriores da coxa.
de força é acompanhado de aumento da intensidade da EMG durante a contração
voluntária máxima (CVM), que precede qualquer alteração significativa do diâmetro
do músculo. As alterações iniciais de força deviam-se, portanto, essencialmente a
fatores neurais, verificando-se uma contribuição progressiva dos fatores hipertróficos
à medida que o processo de treino continuava. Saliente-se que o ganho de produção
muscular conseguido à custa da otimização dos processos neurais permite ao músculo repetir mais execuções com cargas mais elevadas, fornecendo-lhe uma base adequada para responder melhor às exigências dos métodos que visam as adaptações
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
215
FACULDADE DE MOTRICIDADE HUMANA
uma maior capacidade da ativação antagonista em adaptar-se em magnitude e timing
às alterações de atividade agonista, corrigindo possíveis erros da fase de aceleração
e conduzindo, assim, o movimento à trajetória inicialmente prevista.
Contributos da eletromiografia para o estudo das adaptações reflexas no
ciclo muscular alongamento-encurtamento
Vários estudos recorreram à análise dos padrões eletromiográficos dos músculos extensores do membro inferior para avaliar as adaptações neurais de indivíduos
sujeitos a processos de treino com exercícios que envolviam o CMAE, nomeadamente
saltos em profundidade (Mil-Homens, 1995; Kyrolainen & Komi, 1995; Viitasalo et al.,
1998). Esses estudos verificaram que o treino pliométrico produzia alterações de ativação neuromuscular evidenciadas por EMG, e que essas alterações estavam relacionadas com redução do tempo total de contacto com o solo durante a receção/impulsão e
com aumento da altura do centro de gravidade durante a impulsão vertical (Figura 4).
Por um lado, o treino induzia um aumento da ativação EMG na fase de pré-ativação, ou seja, antes do contacto com o solo. Devido a essa maior pré-ativação antecipatória, que é pré-programada centralmente, o complexo músculo-tendinoso apresentava, no
momento do contacto, um elevado stiffness, que lhe permitia resistir melhor ao impacto
na fase excêntrica, reduzindo a amplitude do alongamento com consequente redução
da duração da fase de travagem. Esse aumento de stiffness muscular durante a fase
excêntrica permite um maior armazenamento de energia elástica nas pontes cruzadas
e nos tendões, que é usada no início da fase concêntrica, contribuindo para uma melhor
capacidade de produção de força. Esta pré-ativação implica experiência anterior para ser
iniciada na altura certa antes do impacto. Kyrolainen e Komi (1995) verificaram que atletas treinados em esforços de potência muscular apresentavam em saltos em profundidade uma pré-ativação mais intensa e rápida do que atletas de resistência. Importa, ainda,
referir que, ao estudarem a ação de saltitar, Funase e colaboradores (2001) verificaram
que a pré-ativação estava presente nos gémeos, mas não no solear.
Outra adaptação típica observada em sujeitos que treinam com saltos em profundidade consiste num ganho de atividade mioelétrica no período compreendido entre
os 40 e os 120 ms após o contacto (Mil-Homens, 1995; Viitasalo et al., 1998), consequência de um melhor aproveitamento da resposta ao reflexo miotático que aumenta
o input neural para as redes de motoneurónios medulares. Esse aumento de atividade
EMG é proporcionalmente maior do que o verificado na atividade EMG referente à segunda parte do tempo de contacto no solo, depois dos 120 ms, e que corresponde à
ativação voluntária de origem cortical. Estas adaptações permitem que os atletas executem saltos em profundidade de alturas maiores, sem aumento do tempo de contacto no
220
Universidade Técnica de Lisboa
ADAPTAÇÕES NEURAIS À ATIVIDADE FÍSICA E À INATIVIDADE
a
b
c
d
Figura 4. Adaptações neurais ao treino de força reativa. Sinal da plataforma de forças (Fz) e
sinais EMG dos músculos vasto interno do quadricípite crural (VI), bicípite crural (BC), gémeo
externo (GE) e solear (SOL) registados no salto em profundidade antes e depois da aplicação
de um programa de treino de força reativa com duração de 16 semanas. No salto em profundidade podem ser identificados diferentes instantes: início do salto (a), contacto no solo (b), final
da fase excêntrica (c), final da impulsão (d). As principais adaptações neurais evidenciadas
pelos registos EMG ocorrem antes do contacto com o solo (na fase de pré-ativação) e durante
a fase de ativação reflexa, entre os 40 e os 120 ms (Adaptado de Mil-Homens, 1995).
solo e sem redução da altura de impulsão vertical. Também neste aspeto, Kyrolainen e
Komi (1994) encontraram diferenças no padrão EMG presente no salto em profundidade, entre atletas de potência e atletas de resistência, com os primeiros a apresentarem,
para os vastos do quadricípite, um rácio mais elevado entre a atividade EMG produzida
nas fases excêntrica e concêntrica. Contudo, esta diferença não se manifestou no solear. As diferenças EMG verificadas nos atletas de potência estavam, provavelmente,
associadas com a constatação de que estes também apresentavam menor tempo de
contacto e maior velocidade de impulsão do que os atletas de resistência.
Como já referimos, o comportamento muscular em CMAE não é um exclusivo das ações do membro inferior, encontrando-se também em ações do membro
superior. O alongamento prévio a que são sujeitos, durante a fase de preparação,
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
221
Adaptações do tecido conjuntivo
à atividade física e à inatividade
Características Mecânicas dos Materiais Biológicos
Efeitos de cargas externas
A aplicação de uma carga externa deformante a um tecido biológico leva a
que este produza uma resposta mecânica a essa carga. Esta reação é habitualmente
designada por “tensão mecânica” ou “resistência interna do tecido”. A reação de cada
tecido ou estrutura (ligamento, tendão, cartilagem, osso, etc.) à aplicação de carga
mecânica depende de vários fatores, dos quais se salientam, por um lado, a composição histoquímica do tecido, a forma e o tamanho da estrutura e, por outro lado, as
características específicas da carga, ou seja, a sua intensidade, a sua direção, assim
como a frequência e duração da sua aplicação.
As propriedades estruturais dos tecidos refletem o comportamento mecânico do
corpo como um todo, no qual se consideram tanto as propriedades intrínsecas das componentes constituintes como o seu arranjo geométrico, ou seja, a sua arquitetura. Estas
propriedades intrínsecas do material, assim como a arquitetura dos tecidos, alteram-se
em função da utilização (exercício) e do desenvolvimento (maturação e envelhecimento), podendo igualmente ser afetadas por algumas patologias (e.g. osteoartrose).
Os tecidos biológicos – como o osso, a cartilagem, o tendão e/ou o ligamento – são adaptativos, isto é, as características dos seus constituintes, assim como a
sua orientação espacial, alteram-se, adequando-se ao tipo de solicitação a que são
predominantemente submetidos. Por exemplo, o osso perde densidade quando não
é sujeito a carga gravítica durante períodos prolongados de tempo. Por sua vez, a
disposição das fibras de colagénio num ligamento ou num tendão adapta-se em função da orientação das forças que lhe são normalmente aplicadas. Em função desta
característica adaptativa, estes tecidos tendem a não ser homogéneos, uma vez que
diferentes porções do tecido podem sofrer adaptações diferentes. Um exemplo é a
diferença entre a zona superficial da cartilagem articular, rica em fibras de colagénio
orientadas transversalmente, e as zonas profundas em que as fibras de colagénio e
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
229
FACULDADE DE MOTRICIDADE HUMANA
y
Z
Linhas de
deformação
Força
deformante
x
A
B
Figura 2. Exemplos de deformações de corte resultantes da aplicação de forças externas de
torção (A) e de flexão (B).
Na maioria dos casos, as cargas externas produzem em simultâneo diversos
tipos de deformação e em consequência desencadeiam uma conjugação dos diferentes tipos de tensões internas. Para além disso, e tal como atrás foi referido, as
deformações lineares e de corte influenciam-se mutuamente (Figura 3-B).
Curva de tensão/deformação
A razão entre a resistência interna à deformação e o grau de deformação define o comportamento mecânico dos materiais ou tecidos. A curva de tensão/deformação (stress/strain) obtém-se representando graficamente os diversos valores de
resistência interna de cada nível de deformação (para variações infinitesimais da deformação). Embora os materiais constitutivos dos tecidos biológicos não sejam corpos
elásticos perfeitos, o estudo do comportamento elástico dos materiais permite uma
boa compreensão de parte do comportamento mecânico dos tecidos vivos sujeitos a
cargas externas (Fung, 1990). Este comportamento é explicado pela relação entre a
tensão (força elástica) e a deformação, sendo descrito pela seguinte expressão:
Re = Ke Δs
Re = Tensão elástica (força elástica por unidade de superfície)
Ke = Coeficiente elástico
Δ s = Medida da deformação
232
Universidade Técnica de Lisboa
ADAPTAÇÕES DO TECIDO CONJUNTIVO À ATIVIDADE FÍSICA E À INATIVIDADE
A relação apresentada entre a resistência interna e a deformação é linear. No
entanto, os tecidos biológicos, tais como o tendão, o ligamento e a cartilagem, apresentam comportamentos elásticos não lineares. Nestes tecidos, a resistência à deformação tende a crescer exponencialmente com a deformação. Em corpos elásticos, a
energia acumulada durante a fase de deformação é restituída quando a carga externa
deformante deixa de atuar conforme a expressão abaixo:
Epe= ∫ Re δs <=> Epe=1/2 Ke Δs2
Epe = Energia potencial elástica
Re = Tensão interna para cada grau de deformação
δ s = Variação infinitesimal da deformação
Re = Ke x Δs
Assim, a energia potencial elástica (Epe) pode ser calculada através do integral da resistência interna em ordem à deformação, sendo este a medida da área
abaixo da curva de resistência interna/deformação – Figura 3 (Shrive & Frank, 1994).
Tensão
(Pa)
Tensão
(Pa)
Deformação (m)
Deformação (m)
A
B
Figura 3. Curvas de tensão/deformação para corpos com comportamento elástico não linear (A)
e corpos com comportamento elástico linear (B). Em ambos os gráficos, a área abaixo da curva
é a medida da energia potencial elástica acumulada no corpo em função da deformação.
Quando um tecido é sujeito a uma carga fisiologicamente excessiva, a sua
deformação chegará a níveis que envolvem alterações estruturais das quais o tecido
pode não ter capacidade de recuperar. Nesse caso, ou o tecido não regressa à forma
inicial, ou esse retorno pode ser prolongado no tempo e considera-se, então, que se
ultrapassou o regime de deformação elástica e se entrou em regime de deformação
plástica (ou deformação estrutural), sendo esta zona da curva de resistência interna/
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
233
FACULDADE DE MOTRICIDADE HUMANA
Tensão aplicada pelo músculo
Tensão de corte
Figura 5. Vista posterior do pé e tornozelo direito. Exemplo da dependência entre as tensões de
corte em relação às tensões em alongamento. A tensão de corte no tendão de Aquiles é consideravelmente maior se a deformação for produzida quando este está sujeito a tensão elevada
em alongamento.
Formas de aplicação da carga e resposta dos tecidos
Cargas externas constantes
Quando a cartilagem articular é sujeita a uma compressão constante ou um
ligamento a uma tensão constante, ambas prolongando-se no tempo, observa-se que
estes tecidos apresentam uma rápida deformação inicial. No entanto, se a carga deformante se mantiver constante, os tecidos continuam a deformar-se de forma lenta
e progressiva. Este tipo de comportamento (creep) deve-se às características viscoelásticas destes tecidos, ou seja, a deformação inicial corresponde à deformação da
matriz sólida de fibras de colagénio e dos proteoglicanos, enquanto a deformação
lenta e progressiva que se segue se deve ao fluxo do líquido intersticial para fora do
tecido (exsudação). Este fluxo é lento porque se estabelece atrito de fricção entre os
poros da matriz sólida (fibras e proteoglicanos) e o fluido intersticial (Figura 6).
Deformações constantes
Quando a um tecido biológico viscoelástico é aplicada uma carga externa deformante, este apresenta uma tensão à deformação que aumenta rapidamente. Como
vimos anteriormente, esta resistência aumenta com o incremento da velocidade de
deformação (viscoelasticidade). Se esta deformação se mantiver constante ao longo
do tempo, regista-se uma progressiva diminuição da tensão, que se designa por rela-
236
Universidade Técnica de Lisboa
FACULDADE DE MOTRICIDADE HUMANA
Carga reduzida
Carga fisiológica
Sobrecarga
Figura 10. Representação esquemática da estimulação mecânica de diferentes magnitudes
exercida numa estrutura biológica (cartilagem articular) e respetiva repercussão nas células e
composição bioquímica da matriz.
Os efeitos da solicitação mecânica sobre o osso, a cartilagem articular e os
ligamentos serão abordados seguidamente e reportam-se, principalmente, a estudos
experimentais animais, já que a maioria dos métodos de análise destas estruturas é
invasiva. Em primeiro lugar, será feita referência à influência das solicitações mecânicas sobre o osso, órgão que se encontra em constante remodelação e que responde
segundo a lei de Wolff (Pezarat-Correia & Espanha, 2010: p. 156). Seguidamente, o
mesmo será feito em relação à cartilagem articular, elemento fulcral para um funcionamento normal da articulação que, tal como o osso, é sensível às alterações do suporte
de peso e ao movimento, com alterações da síntese das suas principais componentes
(proteoglicanos e colagénio). Finalmente, serão referidas as adaptações funcionais
dos ligamentos, estruturas que respondem preferencialmente às forças tensionais
com um alinhamento típico das suas fibras.
Osso
Funções e propriedades mecânicas
A maioria dos ossos que compõem o esqueleto humano são, essencialmente,
órgãos mecânicos, tornando a resistência mecânica a principal propriedade óssea.
Esta resistência é determinada pela matriz extracelular do tecido ósseo, um compósito de fibras de colagénio e de cristais inorgânicos; pela quantidade relativa de tecido
ósseo compacto e esponjoso de cada osso; e pela forma e dimensão do osso, o chamado fator arquitetural (Frost, 2003).
244
Universidade Técnica de Lisboa
FACULDADE DE MOTRICIDADE HUMANA
Ligamentos
Os ligamentos são constituídos por feixes de fibras de colagénio que se inserem
no esqueleto ósseo, maioritariamente nas imediações das articulações. Estes formam
com o tecido ósseo uma unidade na qual se distingue uma porção central, constituída por
tecido conjuntivo denso modelado (o ligamento propriamente dito) e duas extremidades
(as inserções ligamentares) cuja composição histológica se caracteriza por um aumento
gradual da rigidez, à medida que se progride do ligamento para o osso (Frank & Shrive,
1994; Woo et al., 1991). A orientação das fibras do ligamento encontra-se de modo a proporcionar estabilidade mecânica à articulação e/ou a limitar ou condicionar o movimento
articular. O tamanho e a forma dos ligamentos são muito variados ao longo do esqueleto.
A nível microscópico, os ligamentos são estruturas complexas constituídas por
células, os fibroblastos, rodeadas por uma matriz. As células são responsáveis pela síntese da matriz e são relativamente escassas, representando uma reduzida percentagem
da totalidade do ligamento. Os fibroblastos não são células isoladas entre si, nem física
nem funcionalmente. Estudos recentes demonstraram a existência de uma estrutura de
comunicação e de interação metabólica entre células adjacentes, através de prolongamentos citoplasmáticos que se estendem por distâncias consideráveis numa estrutura
tridimensional de alguma complexidade (Benjamin & Ralphs, 2000; Lo et al., 2002).
A matriz é constituída essencialmente por água (cerca de 75%), o que parece
estar na origem do comportamento viscoelástico do ligamento. O volume restante da
matriz é preenchido por elementos sólidos, nomeadamente o colagénio do tipo 1, os
proteoglicanos e outras proteínas, como a elastina (Frank, 2004).
Funções e propriedades mecânicas
Uma das principais funções do ligamento consiste em manter a estabilidade passiva da articulação, bem como contribuir para a definição dos eixos articulares e dos
limites do movimento articular. Do ponto de vista mecânico, os ligamentos oferecem
uma elevada resistência interna às tensões geradas pelo movimento articular. Em contraste, são particularmente frágeis às forças de compressão ou corte. Nas articulações,
as forças de tensão tendem a afastar as extremidades do ligamento, podendo acontecer
durante o movimento articular ou nos limites deste. Assim, a função dos ligamentos
revela-se importante tanto no decurso do movimento, ao prevenirem a ocorrência de
movimentos “anormais” na articulação e a criação de centros de rotação articular,
como no final do movimento, quando funcionam como elementos de limitação articular.
A deformação mecânica (strain) dos ligamentos face às forças deformantes em
tensão (stress) caracteriza-se pela variação não linear da sua resistência interna (Figura
15). Isto significa que, perante cargas de tensão reduzidas, o ligamento é relativamente
complacente, talvez devido à configuração “em frisado” (crimp) do colagénio e às pro-
258
Universidade Técnica de Lisboa
ADAPTAÇÕES DO TECIDO CONJUNTIVO À ATIVIDADE FÍSICA E À INATIVIDADE
I
II
III
IV
Tensão
(Pa)
1,6
1,2
0,8
0,4
0
2
4
6
8
10
Deformação (m)
Figura 15. Curva típica de tensão/deformação do ligamento. I – Fase elástica não linear (toe
region); II – Fase elástica linear; III – Fase plástica; IV – Fase de falência (adaptado de Frank &
Shrive, 1994, pp.116).
priedades viscoelásticas. Face a cargas cíclicas e/ou constantes, o comportamento do
ligamento é praticamente linear no incremento da tensão, até ao estado de falência.
Assim, no movimento articular “normal”, sempre que as tensões forem de fraca
intensidade, também a resistência oferecida pelo ligamento é reduzida, o que acontece
no início ou na amplitude média do movimento. Nestas condições, os ligamentos funcionam como guias do movimento, encaminhando as peças ósseas, de acordo com
a orientação definida pela geometria das superfícies articulares, em conjunto com os
tendões dos músculos periarticulares. Sempre que a intensidade das forças de tensão é
elevada, nomeadamente quando o movimento se aproxima dos seus limites ou quando
acontecem movimentos “anormais” na articulação, também a resistência interna dos
ligamentos tende a aumentar. Nessas condições, os ligamentos tornam-se mais rígidos
e a sua ação é dirigida para a proteção da articulação, contribuindo para a definição dos
limites do movimento articular ou prevenindo a ocorrência de movimentos “anormais”.
O comportamento mecânico dos ligamentos face às tensões mecânicas externas é atribuído a três fatores: 1) propriedades mecânicas dos constituintes do ligamento, que por sua vez dependem do conteúdo e organização das moléculas de
colagénio, água e proteoglicanos; 2) geometria do ligamento, i.e. comprimento, forma
e área de secção transversal; e 3) complexidade da junção ligamento-osso (inserção
ligamentar) – Frank (2004) e Woo et al. (1991).
De todos os constituintes ligamentares, o colagénio é aquele que maior resistência interna oferece às forças deformantes de alongamento. Organizado em fibras,
Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física
259