Anais do XLVIII SBPO
Simpósio Brasileiro de Pesquisa Operacional
Vitória, ES, 27 a 30 de setembro de 2016.
COMPARAÇÃO DO DESEMPENHO DE ALGORITMOS
EVOLUCIONÁRIOS APLICADOS AO PROJETO DE ESTRUTURAS DE
TRANSMISSÃO COMPACTAS COM MÚLTIPLOS CIRCUITOS
João Antônio de Vasconcelos1 , Ricardo de Souza Ribeiro1 , Douglas Angelo Teixeira1,2 ,
Marcos Felipe de Oliveira Ribeiro1 , Edino Barbosa Giudice Filho3
1 Universidade
Federal de Minas Gerais
Av. Antônio Carlos, 6627 - Pampulha - 31270-901 Belo Horizonte, MG, Brasil.
2 Instituto
Federal do Norte de Minas Gerais
Rua Dois, 300 - Village do Lago I - 39404-058 Montes Claros, MG, Brasil.
3 CEMIG
Distribuição S.A.
Av. Barbacena, 1200 - Santo Agostinho - 30190-131 Belo Horizonte, MG, Brasil.
[email protected], [email protected],
[email protected], [email protected],
[email protected]
RESUMO
Este trabalho apresenta a modelagem do problema de otimização de estruturas de linhas
de transmissão aéreas compactas com múltiplos circuitos e a comparação do desempenho de diversos
algoritmos evolucionários na solução deste problema. A formulação desenvolvida adota objetivos
que representam algumas características avaliadas pelas concessionárias de energia elétrica, no
momento do projeto de torres de transmissão, além das restrições determinadas por norma. Um
método de tomada de decisão também é aplicado para auxiliar na geração da população inicial
e para ordenar as soluções obtidas por cada algoritmo. Emprega-se uma análise estatística dos
resultados para definir quais algoritmos são mais apropriados para tratar da otimização das estruturas
compactas. A partir das avaliações realizadas, observou-se que os algoritmos baseados em estimativa
de distribuição e evolução diferencial apresentaram maior eficiência.
PALAVRAS CHAVE. Linha de Transmissão Aérea, Otimização, Análise Estatística.
Tópicos: EN - PO na Área de Energia, OC - Otimização Combinatória, EST - Estatística
ABSTRACT
This work presents the modeling of the problem of optimization of compact overhead
transmission line structures with multiple circuits and the comparison of the performance of different
evolutionary algorithms in solving this problem. The developed model adopts goals that represent
some characteristics evaluated by electric companies at the time of project of transmission towers,
as well as standard determined constraints. A decision-making method is also used to assist in the
generation of the initial population and sorting the solutions for each algorithm. Statistical analysis is
applied to the results to determine which algorithms are best suited to deal with the optimization of
compact structures. Based on the evaluations, it was observed that the algorithms based on estimation
of distribution and differential evolution had higher efficiency.
KEYWORDS. Overhead Transmission Line, Optimization, Statistical analysis.
Paper topics EN - OR in the Energy Area, OC - Combinatorial Optimization, E - Statistics
867
Anais do XLVIII SBPO
Simpósio Brasileiro de Pesquisa Operacional
Vitória, ES, 27 a 30 de setembro de 2016.
1. Introdução
A necessidade de se transmitir grandes quantidades de energia em alta tensão, dentro
de centros urbanos, se tornou uma realidade na sociedade atual. Contudo a área disponível para
transmissão se limita basicamente às faixas de passagem de linhas de transmissão já presentes.
Assim, busca-se construir novas linhas que ocupem estreitos corredores ao longo do seu percurso.
Para tanto, uma possível alternativa são as linhas de transmissão que utilizam estruturas
compactas com múltiplos circuitos. Além de ter uma maior capacidade de transmissão, também
ocupam estreitas faixas de passagem. O principal desafio no projeto destas torres é selecionar e
posicionar os condutores e cabos de proteção sem violar as restrições determinadas por norma.
Assim, são definidos sete objetivos e nove restrições na modelagem do problema para auxiliar na
busca por soluções factíveis e eficientes.
Foram utilizados oito algoritmos evolucionários para otimizar a escolha e a posição dos
condutores. As soluções obtidas pelos algoritmos foram comparadas entre si, a fim de identificar
qual algoritmo apresenta soluções mais eficazes. Além da etapa de otimização aplicou-se um método
de tomada de decisão para auxiliar na formação da população inicial das estruturas e na ordenação
das soluções.
Após trinta execuções de cada algoritmo empregaram-se testes estatísticos para verificar a
eficiência das implementações realizadas. Por fim, apresentou-se a solução que obteve a maior nota
com suas funções objetivo, características e posicionamento dos condutores e cabos de proteção.
Na Seção 2 é apresentada uma breve descrição do problema e sua formulação matemática.
Na Seção 3 são apresentados os algoritmos de otimização utilizados, bem como a metodologia de
tomada de decisão adotada. Na Seção 4 são apresentados e discutidos os resultados experimentais.
Finalmente, na Seção 5 são apresentadas as conclusões do trabalho.
2. Descrição do Problema
O problema a ser tratado é a otimização de estruturas de transmissão de energia elétrica
compactas com múltiplos circuitos. Para tanto, é necessário selecionar e posicionar os condutores e
cabos de proteção de forma a reduzir a faixa de passagem ocupada pela linha de transmissão. As
tensões utilizadas em cada circuito da torre serão de 138 ou 230 kV. Cada estrutura suportará de 2 a
4 circuitos com potências independentes. Neste trabalho, entende-se por potências independentes
as potências transmitidas na mesma estrutura, mas que possuem origens e destinos diferentes. Por
questões de segurança da manutenção em linhas vivas, os circuitos de tensão mais elevadas são
posicionados acima dos circuitos com tensão de menor amplitude.
Os circuitos considerados podem ser simples ou duplos. As potências transmitidas em
circuitos duplos possuem uma mesma subestação de origem e outra de destino e transportam a
mesma potência. A Tabela 1 apresenta as possibilidades de transmissão com relação aos circuitos de
cada estrutura, em que “S” representa um circuito simples e “SS” representa dois circuitos simples
ou um duplo.
Tabela 1: Possíveis configurações dos circuitos nas torres.
138 kV
S
SS
S
SS
230 kV
S
S
SS
SS
A base de dados utilizada no processo de otimização é composta de setenta e seis condutores
CAA de diversas seções transversais e vinte e seis cabos para-raios. Além das informações sobre
os cabos utilizados, compreende também as possíveis alternativas topológicas e os parâmetros
ambientais, regionais e estruturais de entrada necessários à realização dos cálculos.
Quanto à configuração de um circuito, a mesma é indicada no banco de dados por “H” para
horizontal, “V” para vertical, “D” para delta e “Di” para delta invertido. O número de condutores
868
Anais do XLVIII SBPO
Simpósio Brasileiro de Pesquisa Operacional
Vitória, ES, 27 a 30 de setembro de 2016.
por feixe pode variar de 1 a 4 subcondutores. Para circuitos duplos a configuração da geometria dos
cabos, o número de cabos por feixe e o tipo de condutor de um circuito são idênticos.
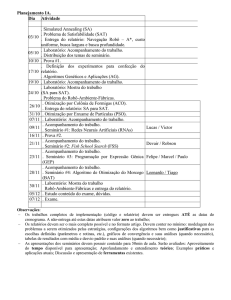
Foram utilizadas 37056 alternativas topológicas distribuídas conforme a Tabela 2. A Figura
1(a) apresenta uma das possíveis estruturas que estão presentes no banco de dados, e representa uma
topologia V-V-V-V com um condutor para os circuitos de 138 kV, dois condutores por feixe para os
circuitos de 230 kV e dois cabos guarda.
Tabela 2: Relação do tipo do circuito e possíveis alternativas topológicas. S - um circuito à esquerda de 138
kV e a direita de 230 kV. SS - dois circuitos à esquerda de 138 kV e a direita de 230 kV.
Circuito
Alternativas Topológicas
S-S
SS - S
S - SS
SS - SS
1152
5184
5120
25600
A seguir serão descritas as características da solução do problema e os objetivos e restrições
utilizadas para avaliar os indivíduos.
2.1. Solução
As soluções ou indivíduos geradas neste trabalho foram codificadas com parâmetros e
variáveis de otimização, que são utilizadas nos cálculos das funções objetivo e de restrição. Os
parâmetros são divididos em conjuntos discretos e reais, em que a alternativa topológica é discreta
e as coordenadas do centro do círculo, de cada feixe de condutores, reais. Quando se define a
alternativa topológica, define-se também o número de condutores por feixe de cada circuito.
O conjunto de variáveis de otimização reais é composto pelos raios de feixe e alturas
adicionais. Já as variáveis de natureza discreta são formadas pelos tipos de condutores e o cabo
guarda. Assim, o número de variáveis de otimização para o problema é dado por (1):
nv = 3 · npi + 1
(1)
em que npi é o número de potências independentes do problema considerado.
Figura 1: (a) Modelo de indivíduo ou solução para o problema. Todos os circuitos estão dispostos na vertical.
(b) Espaço de busca para posicionar os condutores, em que, ccf representa as coordenadas do centro do feixe,
rmin e rmax representam os raios mínimo e máximo para o posicionamento dos condutores, respectivamente.
869
Anais do XLVIII SBPO
Simpósio Brasileiro de Pesquisa Operacional
Vitória, ES, 27 a 30 de setembro de 2016.
Uma solução (x) para o problema é apresentada em (2). Ela é formada pela alternativa
topológica at e pelos vetores de coordenadas dos centros de cada feixe (ccf ), de alturas adicionais
(had ), dos raios dos feixes (rf ) e do tipo de condutor de cada circuito e o cabo guarda (cc).
x = {at, ccf , had , rf , cc}
(2)
O posicionamento espacial de cada condutor é realizado dentro de um espaço de busca
circular, definido por um raio e as coordenadas espaciais que definem o centro do círculo do feixe. A
definição das coordenadas do centro do círculo de cada feixe deve satisfazer às restrições de distância
entre cabo e solo para o condutor mais baixo e às de distâncias mínimas entre duas fases e entre fase
e terra. Isto para cada nível de tensão, calculadas conforme apresentado em [EPRI, 2008]. Por fim,
os condutores são posicionados com base em um plano definido pelos eixos horizontal e vertical,
cuja origem é a interseção do plano ao nível do solo com o plano ao centro da torre, como mostra a
Figura 1(b).
O valor das alturas adicionais pode variar de 0 a 20 m. Já o raio de cada feixe, que auxilia
no posicionamento dos condutores, pode variar de 3 a 20 vezes o diâmetro do condutor posicionado.
Após a definição do raio do feixe, os condutores são posicionados conforme apresentado na Tabela
3. Cabe ressaltar que optou-se em posicioná-los de forma simétrica para facilitar a utilização de
espaçadores comerciais.
Tabela 3: Determinação do ângulo inicial e ângulo entre condutores para cada número de condutores por
feixe.
Condutores por feixe
Ângulo Inicial
Ângulo entre cabos
1
2
◦
◦
0
0◦
0
180◦
3
4
◦
30
120◦
45◦
90◦
2.2. Objetivos e Restrições
Para avaliar se uma determinada solução é promissora são considerados sete objetivos:
minimização da altura da torre, maximização da ampacidade excedente, minimização do custo,
minimização das perdas dos condutores, minimização do esforço mecânico na estrutura, maximização
da potência característica e minimização da faixa de passagem. As funções objetivo são identificadas
de f1 (x) a f7 (x), respectivamente.
Para verificar se determinada solução é factível são consideradas as restrições de carga de
ruptura do cabo, ampacidade do condutor, efeito corona, rádio interferência, ruído audível, distâncias
de segurança conforme NBR5422, campo elétrico e magnético, distância de segurança entre circuitos
e espaço de busca para o posicionamento do condutor. Essas restrições são definidas de g1 (x) a
g9 (x), respectivamente. Assim, o problema de otimização é formulado conforme proposto em
[Vasconcelos et al., 2015]:
min FO(x) = {f1 (x) , . . . , f7 (x)}
s.a : G(x) = {g1 (x) , . . . , g9 (x)}
x = {at, ccf , had , rf , cc} ∈ X
A altura da torre e a faixa de passagem são dadas por estrutura, então possuem apenas um
valor. As demais funções objetivo são formadas por um vetor com uma posição para cada potência
independente. O custo, as perdas e os esforços mecânicos são obtidos pela soma das contribuições
de cada circuito da torre. Já os objetivos f 2 (x) e f 6 (x) são obtidos pela soma do inverso do valor da
ampacidade excedente e da potência característica por circuito, respectivamente. Isto é feito, para
870
Anais do XLVIII SBPO
Simpósio Brasileiro de Pesquisa Operacional
Vitória, ES, 27 a 30 de setembro de 2016.
que ao minimizá-las obtenha-se a maximização da ampacidade excedente e da potência característica
da estrutura.
A minimização da altura da torre permite diminuir o custo da fundação, o gasto para sua
construção e diminuir a ação dos ventos na mesma. A altura é definida como sendo a altura do cabo
de proteção.
A segunda função objetivo busca maximizar a ampacidade excedente nos cabos condutores,
isto é, a diferença entre a corrente máxima (ampacidade) que o feixe de condutores pode transmitir
e a corrente elétrica para transmitir a potência nominal do circuito. A ampacidade dos cabos é
calculada para cada um dos condutores a partir de dados do condutor e das condições ambientais do
local onde a linha será construída, conforme [CIGRE, 2014].
A minimização do custo dos condutores auxilia na busca por soluções com reduzido custo
dos cabos. Calcula-se o custo em função da massa do cabo para 1 km de comprimento de linha e do
preço por unidade de massa.
A minimização das perdas dos condutores considera as perdas provenientes do aquecimento
dos cabos (efeito Joule) e as perdas relacionadas à ionização do ar em volta do condutor (efeito
corona), [Maruvada et al., 1989]. É definida por quantos kW de perdas ocorrem por km de linha.
A minimização dos esforços mecânicos nas estruturas são calculados considerando as
estruturas de suspensão. O vento influencia as linhas de transmissão exercendo uma pressão sobre os
condutores, que é proporcional à velocidade do vento e resulta em uma força perpendicular ao eixo
longitudinal dos cabos [Labegalini et al., 1992]. Combinado com o peso do próprio condutor por
unidade de comprimento, chega-se em uma força resultante, a qual deseja-se minimizar.
A maximização da potência característica visa aumentar a capacidade de transmissão da
linha. Valores típicos de impedância e potência característica de linhas de transmissão convencionais
são apresentadas por [Kiessling et al., 2003]. Estes valores variam com o número de condutores e
com o nível de tensão do circuito. Assim, é possível aumentar a capacidade de transmissão com a
variação do número de condutores e com o tipo de condutor de cada circuito.
A minimização da faixa de passagem é determinante para o projeto de uma linha de
transmissão compacta. Ela deve ser calculada levando-se em conta o balanço dos cabos devido à
ação do vento, efeitos elétricos e magnéticos e o posicionamento das fundações de suportes e estais.
Elas podem ser obtidas tanto para estruturas com condutores dos dois lados da torre quanto apenas
em um dos lados da estrutura, [ABNT, 1985].
As funções de restrição são definidas de modo que as soluções atendam às normas técnicas
e especificações exigidas pela concessionária de energia elétrica. É o conjunto de restrições que
define o espaço viável de busca, e assim quando uma solução não atende a esse conjunto, ela é
penalizada durante o processo de otimização. As restrições são definidas por circuito, caso em que
se tem um vetor de restrições, ou para a estrutura como um todo, caso em que há apenas um valor.
Após calcular todas as restrições, é possível determinar a penalidade atribuída à solução, a
qual mensura o quanto a solução em análise viola uma ou mais restrições apresentadas. Quando uma
solução não viola nenhuma das restrições, ela é dita factível.
Durante o processo de otimização, principalmente no início, algumas restrições são violadas
devido ao grande número de restrições a serem atendidas pela solução. Assim, é realizado o cálculo
da função de penalidade externa P (x) atribuída à solução que viole alguma restrição, de acordo com
(3). Optou-se por este tipo de penalidade por penalizar a função objetivo apenas na região inviável.
O valor de P (x) nada mais é do que o somatório dos quadrados das violações de todas as restrições
utilizadas no problema.
P (x) =
N
res
X
{max [0, gj (x)]}2
(3)
j=1
871
Anais do XLVIII SBPO
Simpósio Brasileiro de Pesquisa Operacional
Vitória, ES, 27 a 30 de setembro de 2016.
3. Otimização e Tomada de Decisão
O problema a ser otimizado, conforme descrito na capítulo anterior, é na verdade um
problema de tomada de decisão e otimização com muitos objetivos. Isto o torna complexo e necessita
de uma implementação especial para sua solução.
Inicialmente, serão escolhidas as alternativas topológicas promissoras via tomada de
decisão. Esta etapa reduz a complexidade do problema de otimização, uma vez que o número
de alternativas topológicas cresce com o aumento do número de potências independentes. Em
seguida é realizada a otimização evolucionária do problema restrito com muitos objetivos. Uma
subpopulação inicial é construída a partir de cada topologia selecionada na etapa anterior. O conjunto
de subpopulações forma a população inicial para o algoritmo. Após o término do processo de
otimização haverá um conjunto de soluções eficientes. Neste momento, é aplicada novamente a
tomada de decisão para ordenar as soluções.
3.1. Algoritmos de Otimização
Diferentes algoritmos de otimização e variações foram testados nesta metodologia.
3.1.1. Algoritmo DE/EDA
O algoritmo DE/EDA é constituído a partir dos algoritmos “Differential Evolution”(DE) e
o algoritmo “Estimation of Distibution Algorithm”(EDA).
Características do Differential Evolution (DE) No geral, a ideia básica do DE é adaptar a busca
ao longo do processo evolutivo de modo a balancear convergência e diversidade, uma vez que a
magnitude de variação dos vetores é proporcional à diversidade da população. Dessa forma, no
início do processo evolutivo a variação é grande, uma vez que os indivíduos se encontram distantes
uns dos outros e na medida em que o processo evolutivo se aproxima do final, a população converge
para uma pequena região e a variação se torna pequena. Como consequência desse processo, a
busca adaptativa beneficia o processo evolutivo ao proporcionar uma busca global com grandes
variações no início e uma busca local ao final do processo, a qual tem por objetivo refinar as soluções
encontradas [Xue et al., 2005].
Na literatura existem diferentes implementações do algoritmo DE para problemas multiobjetivo. Na proposta de Sun et al. [Sun et al., 2005], cada indivíduo pi da população corrente gera um
novo indivíduo auxiliar p0i como mostra a equação (4) a seguir:
p0i
= (F + 0, 5) · pbest + (F − 0, 5) pi + F
K
X
(pkia − pkib )
(4)
k=1
Na qual pbest se trata do melhor indivíduo da população corrente; (F + 0, 5) representa a
intensidade da influência do indivíduo pbest , K é o número de vetores de perturbação, F é a escala
da pertubação, e pkia e pkib são indivíduos distintos escolhidos aleatoriamente na população corrente.
Então, um novo indivíduo é formado a partir de uma escolha das variáveis de pi e p0i . Nessa
escolha, para cada variável, é gerado um número aleatório entre 0 e 1. Se esse for menor que uma
constante CR, é tomada a variável de p0i para formar o novo indivíduo, caso contrário a variável de
pi . Esse procedimento é realizado para os N indivíduos pi para se gerar novos N indivíduos.
Características do Estimation Distribution Algorithm (EDA) O EDA, basicamente, obtém
novas soluções a partir de um modelo probabilístico que caracteriza a distribuição de soluções
promissoras. Dada uma população de soluções P op (t) na geração t, o algoritmo EDA executa os
passos mostrados a seguir:
• Seleção: São selecionadas M soluções promissoras de P op (t) para formar a população de
pais Q (t) a partir do método de seleção por truncamento.
872
Anais do XLVIII SBPO
Simpósio Brasileiro de Pesquisa Operacional
Vitória, ES, 27 a 30 de setembro de 2016.
• Modelagem: É construído um modelo probabilístico p (x) baseado na informação estatística
extraída das soluções em Q (t).
• Amostragem: Amostram-se novas soluções de acordo com o modelo probabilístico p (x).
• Substituição: Substitui-se, completamente ou em partes, as soluções em P op (t) pela novas
soluções amostradas para formar a nova população P op (t + 1).
Uma das maiores questões do EDA é como selecionar os indivíduos pais [Sun et al., 2005].
Um dos métodos mais utilizados é a seleção por truncamento. Nessa seleção os indivíduos são
ordenados de acordo com os valores de suas funções objetivo e apenas os M melhores indivíduos
serão selecionados como pais.
Outra questão é como construir o modelo de distribuição probabilística p (x). Esse pode
ser, por exemplo, uma distribuição Gaussiana, um modelo de mistura de Gaussianas, um histograma
ou, como escolhido, um modelo Gaussiano com matriz de covariância diagonal (MG/MCD). Neste,
a função densidade conjunta da k-ésima geração é escrita como mostram as equações (5) e (6):
pk (x) =
n
Y
N (xi ; µki , σik ),
(5)
i=1
N (xi ; µki , σik )
1
1
=√
e2
2πσi
xi −µi
σi
2
.
(6)
Em 5, a função densidade de probabilidade n dimensional conjunta é fatorizada como um
produto de n univariadas funções de distribuição normal independentes. No caso, para cada variável
na k-ésima geração, existem dois parâmetros a serem estimados: a média µki e o desvio padrão σik .
Esses parâmetros são estimados como mostra as equações (7) e (8), nas quais (xk1,i , xk2,i , . . . , xkM,i )
são os valores da i-ésima variável das M soluções pais selecionadas na k-ésima geração.
µki
=
Xki
M
1 X k
=
xt,1 ,
M
(7)
t=1
v
u
M 2
u1 X
k
xkt,i − Xki .
σi = t
M
(8)
t=1
Métodos de Seleção para sobrevivência do Algoritmo DE/EDA O método de seleção para
sobrevivência escolhe os indivíduos que integrarão a população na próxima geração do algoritmo.
Método de seleção para sobrevivência “Torneio Binário” No processo de seleção
baseado em torneio binário é realizado um embaralhamento aleatório dos indivíduos dentro da
população. Cada indivíduo participará de dois torneios com outros indivíduos da população corrente,
de forma aleatória. Primeiramente, são realizadas comparações entre os índices de violação de
restrição dos indivíduos. Se uma solução viola menos as restrições ela será selecionada para a próxima
população. Em caso de empate no valor do índice de violação de restrição, serão consideradas as
relações de dominância entre os indivíduos.
Assim, são comparados todos os objetivos dos indivíduos. Se o indivíduo A domina o
indivíduo B, ou seja, possui ao menos um objetivo com valor menor e não é superado nos demais, ele
será selecionado. Caso os dois indivíduos sejam não dominados será aplicado o método de tomada
de decisão para atribuir uma nota a eles. A solução que obtiver maior nota é selecionada.
Método de seleção para sobrevivência do algoritmo NSGA III Outro método de
seleção adotado foi aquele do algoritmo de otimização NSGA III, conforme [Deb e Jain, 2014].
873
Anais do XLVIII SBPO
Simpósio Brasileiro de Pesquisa Operacional
Vitória, ES, 27 a 30 de setembro de 2016.
3.1.2. Algoritmos DE e EDA
Também foram implementados de forma individual os algoritmos DE e EDA, com as
mesmas variações dos métodos de seleção apresentadas para o algoritmo híbrido DE/EDA, conforme
apresentados na seção anterior.
3.1.3. Algoritmo MOEA/DD
O algoritmo MOEA/DD (Evolutionary Many-Objective Optimization Algorithm Based on
Dominance and Decomposition) [Li et al., 2015] incorpora estratégias do NSGA III e do MOEA/D a
fim de se obter melhor qualidade para os resultados finais.
3.1.4. Algoritmo MOPSO
No algoritmo PSO, cada solução candidata é chamada de “particle”(partícula) e a população
de soluções de “swarm”(enxame). Um PSO básico atualiza uma partícula xi na geração t de acordo
com a equação (9) a seguir [Nebro et al., 2009]:
~xi (t) = ~xi (t − 1) + ~vi (t)
(9)
Na qual o termo ~vi (t) é a velocidade, dada por (10):
~vi (t) = w · ~vi (t − 1) + C1 · r1 · (~xpi − ~xi ) + C2 · r2 · (~xgi − ~xi )
(10)
Nessa equação ~xpi é a melhor solução que a partícula i já conheceu, ~xgi é a melhor solução
global já encontrada no processo de otimização, também conhecida como “leader” (líder ou guia),
w é a ponderação da inércia da partícula, a qual controla o “trade-off” entre a exploração global e
a local, r1 e r2 são duas distribuições normais de números aleatórios na faixa [0, 1] e C1 e C2 são
parâmetros específicos que controlam o efeito das influências cognitiva e global. Para controlar a
velocidade da partícula são definidos limites inferior e superior que a velocidade pode atingir.
Para identificar o melhor valor que determinada partícula atingiu utiliza-se o torneio binário
entre a solução xi e a solução xi−1 . Isto é realizado a cada geração e para todas as partículas do
enxame. Em seguida é realizada a classificação das partículas em fronteiras. As partículas não
dominadas são arquivadas em uma população externa e é calculada a distância de multidão destas
partículas. Esta população pode ter no máximo o tamanho do enxame. Os indivíduos são ordenados
pelo valor decrescente da distância de multidão. São eliminados os indivíduos com menor distância
de multidão e que excedem o tamanho máximo da população externa.
A melhor solução global é obtida dentre as soluções presentes na população externa.
Utilizando-se o método de tomada de decisão, atribui-se uma nota a cada partícula. A solução com
maior nota é definida como líder da geração corrente.
3.2. Tomada de Decisão
No processo de tomada de decisão implementou-se o SMARTS (Simple Multi-Attribute
Rating Technique using Swings) [Parreiras et al., 2006]. Nesse método, para se determinar a nota
de uma solução candidata, é utilizado um procedimento que atribui diferentes pesos a funções de
pertinência definidas a partir dos objetivos adotados, onde a soma dos pesos tem valor unitário.
Assim, tendo em vista que na modelagem matemática do problema há sete objetivos, deve-se avaliar
a importância de cada um deles em relação aos demais para a determinação dos pesos, dentro do
contexto de cada projeto de linha de transmissão.
Para se realizar o cálculo das funções de pertinência para uma dada solução xi , primeiramente atribui-se para cada objetivo um valor correspondente à avaliação da função pseudo-objetivo
φn (xi , rp ), definida em 11. Nesta expressão rp , é um parâmetro de penalidade e P (xi ) é uma função
de penalidade dada em 3. O valor de P (xi ) é definido como o somatório das violações de todas as
restrições utilizadas no problema. Note que quanto menor o valor de φn (xi , rp ) melhor é a solução,
uma vez que deseja-se minimizar fn (xi ) e P (xi ) é nulo quando todas as restrições são satisfeitas.
φn (xi , rp ) = fn (xi ) + rp · P (xi )
(11)
874
Anais do XLVIII SBPO
Simpósio Brasileiro de Pesquisa Operacional
Vitória, ES, 27 a 30 de setembro de 2016.
O cálculo da função de pertinência un (xi , rp ) para cada um dos n objetivos é realizado
conforme 12. Para isto, tomam-se os valores máximos e mínimos para cada um dos n pseudoobjetivos. Note que quanto menor o valor de φn (xi , rp ) maior será o valor de un (xi , rp ). O conjunto
Φn é definido como o conjunto de todas as funções pseudo-objetivos φn (xi , rp ) avaliadas para cada
solução candidata.
un (xi , rp ) =
max[Φn ] − φn (xi , rp )
max[Φn ] − min[Φn ]
(12)
Após o cálculo de todas as pertinências, faz-se o somatório da multiplicação do peso de
cada objetivo (wn ) pela função de pertinência un (xi , rp ) em cada solução candidata i, conforme 13.
Assim, obtém-se a nota final Ui (xi , rp ) de cada solução candidata, onde uma solução com maior
nota é preferível em relação a uma solução de menor nota. Isso torna possível ordenar as soluções
candidatas da melhor até a pior conforme os pesos atribuídos no método.
Nobj
Ui (xi , rp ) =
X
wn · un (xi , rp )
(13)
n=1
4. Resultados experimentais
Para classificar os desempenhos dos algoritmos no problema proposto, são realizadas
uma série de comparações estatísticas. Definiram-se quatro arranjos experimentais, ou blocos, em
que cada um corresponde às diferentes quantidades de potências independentes. Cada bloco tem
sua execução repetida 30 vezes para cada algoritmo de otimização, um valor usual para testes que
assumem normalidade. O nível de significância de todos os experimentos foi definido como α = 5%,
equivalente a um nível de confiança 1 − α = 95%. A Tabela 4 detalha os blocos experimentais.
Tabela 4: Detalhamento dos blocos experimentais.
Bloco
Experimental
1
2
3
4
Potência
Independente (MVA)
138 kV
230 kV
1
2
1
2
145
145
145
145
145
145
300
300
300
300
300
300
Alternativas
topológicas
Subpopulação
Repetições por
algoritmo
44
21
30
Para todos os experimentos utilizou-se o mesmo conjunto de pesos w = {0,30; 0,05;
0,25; 0,25; 0,05; 0,05; 0,05}. Ao final de cada execução, o melhor indivíduo, de acordo com a
metodologia de tomada de decisão, é armazenado. O conjunto formado por todos os melhores
indivíduos de cada execução é novamente ordenado com o uso da metodologia de tomada de decisão,
para atribuição de um valor de nota a cada um.
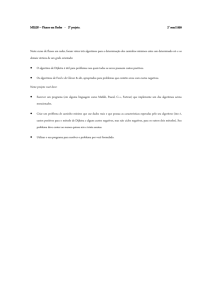
A Figura 2 mostra a silhueta da melhor solução encontrada por todos os algoritmos, e a
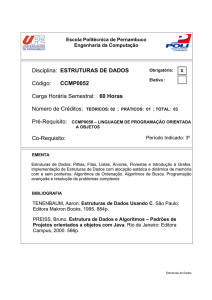
Tabela 5 apresenta os valores das funções objetivo desta solução. A Figura 3 apresenta a nota média
obtida por cada algoritmo, para cada bloco. De forma qualitativa, ela sugere que, para todos os
blocos experimentais, há uma diferença significativa entre a média das notas obtidas pelos algoritmos
MOEA/DD e MOPSO e os demais algoritmos. Para verificar essa conclusão, foi utilizado o teste
estatístico ANOVA (Análise de Variância). Tomando como hipótese nula a igualdade da média da
nota dos algoritmos e como hipótese alternativa a desigualdade, o teste rejeita a hipótese nula quando
o valor p obtido é menor que o nível de significância α previamente estabelecido.
875
Anais do XLVIII SBPO
Simpósio Brasileiro de Pesquisa Operacional
Vitória, ES, 27 a 30 de setembro de 2016.
OPGW 36S
M13.
4T
C10AG
H
2c
ondut
or
es
Wa
x
wi
ng
H
2c
ondut
or
es
Chi
c
k
a
dee
Tabela 5: Detalhamento da solução.
Potência Independente
fobj
Di
1c
ondut
or
S
wi
f
t
Di
1c
ondut
or
Pel
i
c
a
n
138 kV
1
f1
f2
f3
f4
f5
f6
f7
207,34
40384,67
117,36
4391,85
56,06
230 kV
2
1
24,64
69,79
331,96
32493,09 54141,59
159,86
200,77
3840,70
7004,33
54,15
183,46
12,42
2
68,63
36321,01
299,19
5732,13
187,23
Figura 2: Silhueta da solução encontrada.
MOEA/DD
Nota média
0.70
EDA
EDADE
0.68
MOPSO
DE
0.66
NSGA3_EDA
0.64
NSGA3_DE
NSGA3_EDADE
1
2
3
4
Bloco Experimental
Figura 3: Nota média de cada algoritmo por bloco experimental.
Realizado, o teste de fato aponta, a um nível de confiança de 95%, que há uma diferença
estatisticamente significativa entre os desempenhos comparados, tendo o valor p = 1,29e−10 obtido
sido muito menor que o nível de significância α = 0,05.
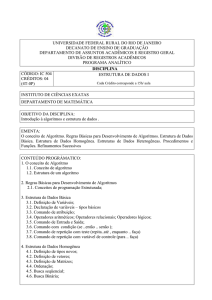
O teste ANOVA não indica porém onde estão as diferenças de desempenho. Essa determinação pode ser feita a posteriori utilizando o teste estatístico de Tukey, que agrega os diferentes
blocos experimentais e indica, para cada par de algoritmos, se há diferença de desempenho estatisticamente significativa. Graficamente, para cada par de algoritmos X-Y, são traçados intervalos de
confiança de 95% do valor da diferença das médias de desempenho. Se o intervalo de confiança
engloba o valor 0, não há como determinar se há diferença de desempenhos. Caso o intervalo seja
em sua inteireza maior do que 0, diz-se que o algoritmo X tem melhor desempenho do que Y, com
nível de confiança de 95%. Analogamente, se o intervalo estiver completamente abaixo de 0, diz-se
que o algoritmo Y é melhor do que X. A Figura 4 mostra o resultado do Teste de Tukey.
O teste indica que, para o problema proposto, os algoritmos MOEA/DD e MOPSO
possuem desempenho pior que os demais, não havendo diferença estatisticamente significativa entre
os desempenhos dos demais algoritmos.
Tanto o teste ANOVA quanto o teste de Tukey tomam como premissas para sua realização
que há normalidade, igualdade de variâncias (homocedasticidade) e independência dos resíduos.
Essas premissas devem portanto ser verificadas para justificar a adoção destes testes estatísticos.
A premissa de normalidade dos resíduos é verificada graficamente através de um gráfico
quantil-quantil dos resíduos, conforme Figura 5. Caso a distribuição dos resíduos seja normal,
espera-se que eles estejam distribuídos dentro da área pontilhada, como de fato estão.
A homocedasticidade dos resíduos é verificada através do teste estatístico de Fligner-
876
Anais do XLVIII SBPO
Simpósio Brasileiro de Pesquisa Operacional
Vitória, ES, 27 a 30 de setembro de 2016.
B−A
C−A
D−A
E−A
F−A
G−A
H−A
C−B
D−B
E−B
F−B
G−B
H−B
D−C
E−C
F−C
G−C
H−C
E−D
F−D
G−D
H−D
F−E
G−E
H−E
G−F
H−F
H−G
(
(
)
(
(
(
)
(
(
(
(
(
)
)
(
)
)
)
(
(
(
(
(
−0.02
(
(
)
)
)
(
)
(
)
)
)
)
)
(
)
)
A = MOEA/DD
B = EDA
C = EDADE
D = MOPSO
E = DE
F = NSGA3_EDA
G = NSGA3_DE
H = NSGA3_EDADE
)
)
)
(
)
)
)
(
(
)
(
(
(
)
(
)
0.00
)
0.02
Diferença das médias
Quantis Observados
Figura 4: Comparação todos contra todos por teste de Tukey.
0.005
0.000
−0.005
−2
−1
0
1
2
Quantis Teóricos
Figura 5: Verificação da premissa de normalidade dos resíduos.
Kileen. Este teste aponta diferença de variâncias quando o valor p obtido é menor do que o nível
de significância α. Como valor p = 0,888 obtido é muito maior do que o nível de significância
α = 0,05, verifica-se esta premissa.
Já a premissa de independência dos resíduos é característica inerente à metodologia
proposta. Cada execução parte de um estado inicial aleatório, que independe de execuções anteriores,
não havendo nenhuma relação entre duas execuções diferentes e os resultados por elas encontrados.
5. Conclusões
O problema de otimização de linhas de transmissão compactas com múltiplos circuitos foi
modelado como um problema de muitos objetivos, contemplando diferentes objetivos de interesse
das concessionárias do setor de energia. Pela natureza do problema, que é complexo e envolve
inúmeras variáveis, reais e discretas, algoritmos evolucionários de otimização mostram-se adequados
para sua resolução. Devido à grande quantidade de objetivos, diferentes soluções incomparáveis
entre si podem ser encontradas, fazendo-se necessário um método de tomada de decisão para ajudar
na escolha da melhor solução encontrada por uma determinada execução.
Diferentes algoritmos evolucionários foram implementados, visando se determinar qual
deles melhor adapta-se ao problema. Dos oito diferentes algoritmos testados, concluiu-se que os
877
Anais do XLVIII SBPO
Simpósio Brasileiro de Pesquisa Operacional
Vitória, ES, 27 a 30 de setembro de 2016.
algoritmos evolucionários MOEA/DD e MOPSO tiveram pior desempenho que os demais algoritmos,
que tiveram desempenhos estatisticamente similares entre si.
A metodologia estatística proposta mostrou-se adequada para a comparação de algoritmos.
Assim, para trabalhos futuros, poderiam ser investigados novos operadores para os algoritmos
evolucionários implementados que sejam mais adequados ao problema modelado, e a metodologia
poderia ser utilizada para compará-los aos algoritmos anteriormente implementados.
Agradecimentos
Os autores agradecem à CEMIG Distribuição, FAPEMIG, CNPq e Capes pelo suporte
financeiro. O software utilizado na geração dos resultados se chama LION e foi desenvolvido no
âmbito do P&D D528 em parceria com a CEMIG/FAPEMIG/ANEEL no Laboratório de Computação
Evolucionária da UFMG.
Referências
ABNT, N. (1985). Projeto Eletromecânico de Linhas Aéreas de Transmissão de Energia Elétrica.
CIGRE (2014). Guide for Thermal Rating Calculations of Overhead Lines. CIGRE Technical
brochure N◦ 601.
Deb, K. e Jain, H. (2014). An evolutionary many-objective optimization algorithm using referencepoint-based nondominated sorting approach, part i: Solving problems with box constraints.
Evolutionary Computation, IEEE Transactions on, 18(4):577–601. ISSN 1089-778X.
EPRI (2008). Transmission Line Reference Book: 115-345 kV Compact Line Design. Electric Power
Research Institute.
Kiessling, F., Nefzger, P., Nolasco, J. F., e Kaintzyk, U. (2003). Overhead Power Line. Springer,
763 p.
Labegalini, P. R., Labegalini, J. A., Fuchs, R. D., e Almeida, M. T. (1992). Projetos Mecânicos das
Linhas Aéreas de Transmissão. Edgard Blucher, São Paulo.
Li, K., Deb, K., Zhang, Q., e Kwong, S. (2015). An evolutionary many-objective optimization algorithm based on dominance and decomposition. IEEE Transactions on Evolutionary Computation.
Maruvada, P. S., Nguyen, D. H., e Zadeh, H. H. (1989). Studies on Modeling Corona Attenuation of
Dynamic Overvoltages. IEEE Transactions on Power Delivery, 4(2):1441–1449.
Nebro, A. J., Durillo, J., Garcia-Nieto, J., Coello, C., Luna, F., e Alba, E. (2009). Smpso: A
new pso-based metaheuristic for multi-objective optimization. In Computational intelligence in
miulti-criteria decision-making, 2009. mcdm’09. ieee symposium on, p. 66–73. IEEE.
Parreiras, R. O., Maciel, J. H. R. D., e Vasconcelos, J. A. (2006). The a Posteriore Decision in
Multiobjective Optimization Problems with Smarts, Promethee II and a Fuzzy Algorithm. IEEE
Transactions on Magnetics, EUA, 42:1139–1142.
Sun, J., Zhang, Q., e Tsang, E. P. (2005). De/eda: A new evolutionary algorithm for global
optimization. Information Sciences, 169(3):249–262.
Vasconcelos, J., Araújo, A., Miranda, G., Adriano, R., Gontijo, C., Silva, J., Mól, R. M., R.S.,
Teixeira, D., Lima, P., Miranda, L., e Giúdice, E. (2015). Otimização de Estruturas de Transmissão Suportando Múltiplos Circuitos de 138 e 230 kV. In CITENEL- Congresso de Inovação
Tecnológica em Energia Elétrica.
Xue, F., Sanderson, A. C., e Graves, R. J. (2005). Multi-objective differential evolution-algorithm,
convergence analysis, and applications. In Evolutionary Computation, 2005. The 2005 IEEE
Congress on, volume 1, p. 743–750. IEEE.
878