CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DE SANTA CATARINA
UNIDADE JOINVILLE
DEPARTAMENTO DE DESENVOLVIMENTO DE ENSINO
CURSO TÉCNICO EM ELETROELETRÔNICA
ELETRÔNICA II
Profª. Bárbara Taques
ÍNDICE
ÍNDICE ............................................................................................................................. 2
CAPÍTULO 1 – AMPLIFICADORES OPERACIONAIS – AMP OP............................ 3
1.1
INTRODUÇÃO AOS AMPLIFICADORES OPERACIONAIS ..................... 3
1.2
OPERAÇÃO DIFERENCIAL E MODO COMUM ........................................ 5
1.3
AMPLIFICADORES OPERACIONAIS BÁSICOS ....................................... 7
CAPÍTULO 2 – APLICAÇÕES NÃO LINEARES COM AMP OP’s .......................... 14
2.1
COMPARADORES ....................................................................................... 14
2.2
OSCILADORES............................................................................................. 18
2.3
MULTIVIBRADORES .................................................................................. 21
CAPÍTULO 3 – FILTROS ATIVOS ............................................................................. 26
3.1
DOMÍNIO DA FREQUÊNCIA ..................................................................... 26
3.2
FUNÇÃO DE TRANSFERÊNCIA ................................................................ 26
3.3
CLASSIFICAÇÃO ......................................................................................... 27
REFERÊNCIAS BIBLIOGRÁFICAS ........................................................................... 34
2
CAPÍTULO 1 – AMPLIFICADORES OPERACIONAIS – AMP OP
1.1
INTRODUÇÃO AOS AMPLIFICADORES OPERACIONAIS
Os amplificadores Operacionais possuem algumas características básicas
como:
1.1.1
Correntes nos dois terminais de entrada igual a zero;
Impedância de entrada muito alta e
Impedância de saída muito baixa.
Simbologia
AmpOp Ideal
Entrada 1
Entrada 1
+
Vd
Saída
Entrada 2
Vo=
AdVd
Entrada 2
1.1.2
+
AdVd
-
-
Tipos de Entrada
Sinal conectado a entrada positiva e a entrada negativa conectada ao terra:
Vo
Saída: Amplificada, com mesma fase da entrada.
3
Sinal conectado a entrada negativa e a entrada positiva conectada ao terra:
Vo
Saída: Amplificada, com fase oposta ao sinal de entrada.
Entrada Diferencia: Sinal conectado entre os terminais positivos e
negativos:
Vo
Saída: Amplificada, em fase com o sinal de entrada.
Exercício: Calcular a saída de um AMPOP com as entradas conectadas como mostrado
no desenho abaixo:
Vo
4
1.2
OPERAÇÃO DIFERENCIAL E MODO COMUM
Uma das características mais importantes de uma conexão de circuitos
diferencial existente em um AMPOP é a capacidae de o circuito amplificar muito pouco
(quase zero) os sinais comuns a ambas as entradas.
O AMPOP fornece um ganho de saída referente a amplificação da diferença dos
sinais opostos aplicados entre as suas entradas (Ad), e um ganho (que no caso ideal
deveria ser zero) que se deve a amplificação de mesmos sinais entre suas entradas (Ac).
Uma vez que a amplificação dos sinais de entrada opostos é muito maior que a dos
sinais de entrada comuns, o circuito fornece uma rejeição de modo comum descrita por
um parâmetro chamado de razão de rejeição de modo comum (CMRR-COMMON-MODEREJEITION-RATION).
ENTRADAS DIFERENCIAIS:
O sinal de diferença, quando entradas separadas são aplicadas ao AMPOP, é
dada por:
Vd=Vi1-Vi2
ENTRADAS COMUNS:
Quando os sinais de entrada são iguais, o sinal comum é dado pela média
aritmética entre os dois sinais:
Vc
1
Vi1 Vi2
2
TENSÃO DE SAÍDA
Uma vez que qualquer sinal aplicado a um AMPOP tem, em geral, componentes
tanto em fase como fora de fase, a saída resultante pode ser expressa como:
Vo=AdVd+AcVc
Considerando entradas opostas dadas por: Vi1=-Vi2=Vs, Vd é dada por:
Vd Vi1 Vi2 Vs Vs 2Vs
Enquanto a tensão de modo comum resultante é:
Vc
1
Vs Vs 0
2
De maneira que a tensão resultante é:
Vo Ad Vd AcVc Ad 2Vs Ac .0
Vo 2 Ad Vs
Considerando entradas de mesma polaridade: Vi1=Vi2=Vs, Vd é dada por:
5
Vd Vi1 Vi2 Vs Vs 0
Enquanto a tensão comum resultante é:
1
1
Vc Vi1 Vi2 Vs Vs Vs
2
2
Portanto, a tensão de saída resultante é:
Vo Ad Vd AcVc Ad 0 Ac .Vs
Vo AcVs
1.2.1 Razão de Rejeição de Modo Comum
A razão de rejeição de modo comum (CMRR) é definida pela seguinte equação:
A
CMRR d
Ac
Este valor também pode ser expresso em termos logarítmicos como:
A
CMRR 20 log 10 d (dB)
Ac
Obs.: a importância da utilização do ganho em decibéis (dB) justifica-se quando
são utilizados grandes valores para CMRR, por exemplo:
CMRR 103 CMRR (dB) 60dB
De modo geral:
CMRR 10 n CMRR (dB) 20.n
dB
A utilização em decibéis facilita a representação gráfica de muitas grandezas que
têm uma ampla faixa de variação.
O valor do CMRR varia com a faixa de freqüência de entrada. Por exemplo, o
valor de 90dB fornecido pelo fabricante do AMPOP 741, só é garantido até
aproximadamente 200Hz. Felizmente, a maioria dos ruídos industriais estão nesta faixa
(60Hz a 120Hz).
Exercícios:
1. Calcular CMRR para os circuitos mostrados abaixo:
-1mV
-0,5mV
-12mV
Vo=-8V
-1mV
0,5mV
2. Determinar a tensão de saída de uma AMPOP para as tensões de entrada
Vi1=150µV, Vi2=140µV. O amplificador tem um ganho diferencial de
Ad=4000 e o valor de CMRR é:
a) 100
b) 105
6
1.3
AMPLIFICADORES OPERACIONAIS BÁSICOS
1.3.1 Modos de Operação do AMPOP
a) Sem realimentação: Também denominado operação em malha aberta e o seu
ganho é estipulado pelo próprio fabricante, ou seja, não se tem controle sobre o mesmo.
Este tipo é muito útil em circuitos comparadores.
Vi
Vo
b) Com realimentação positiva: Esse tipo de operação é denominado operação
em malha fechada. Apresenta como inconveniente o fato de conduzir o circuito a
instabilidade.
Uma aplicação prática deste circuito são circuitos osciladores.
R2
Vi
R1
Vo
c) Com realimentação negativa: Neste modo de operação, a entrada do sinal é
aplicada na entrada negativa do AMPOP. Este é o modo mais importante em circuitos
com AMPOP.
R2
Vi
R1
Vo
O ganho global deste tipo de circuito é dado por:
Rf
V0
, desde que Av (ganho de tensão do amplificador em malha aberta)
V1
R1
seja bastante grande.
As aplicações com este tipo de circuito são inúmeras, como:
Amplificadores Inversores;
Amplificadores Não- Inversores;
7
Seguidor unitário;
Amplificador Somador;
Amplificador Diferencial.
1.3.2 Curto-circuito virtual e terra virtual
Em circuitos com realimentação negativa, o ganho total do circuito depende
somente dos valores das resistências de realimentação. Sendo assim:
Rf
V0
V1
R1
Considerando V0=AvVi
Rf
Rf
V1
R1
R1 Av
Portanto, com valores de Av bastante grandes , os valores de Vi 0 .
Com isso diz-se que, entre as entradas positivas e negativas do AMPOP, com
realimentação negativa, existe um curto-circuito virtual. Virtual porque em um curtocircuito real tem-se V=0 e I≠0, mas no curto-circuito virtual tem-se V=0 e I=0.
No caso em que a entrada positiva está aterrada, considerando Vi=0, a entrada
negativa também terá valor zero. Sendo assim esta ligação é chamada de terá virtual,
pois este ponto não está ligado ao GND.
AvVi
V1 Vi
1.3.3 Tipos de Circuitos Amplificadores Básicos
1. AMPLIFICADOR INVERSOR
Rf
V1
R1
a
Vo
b
V1 Va Va V0
0
R1
Rf
Considerando o terra virtual no ponto a: Va=0
Portanto:
Rf
V
V
V1
0 ,e 0
R1
Rf
V1
R1
8
2. AMPLIFICADOR NÃO-INVERSOR
V1
a
Vo
b
R1
Rf
0 V1 V1 V0
0
R1
Rf
1
V
1
V1
0
R
Rf
1 Rf
Portanto:
R1 R f R1 R f
V0
Rf
R R
V1
R1
f 1
Rf
V0
1
V1
R1
Sendo assim, o amplificador não-inversor não apresenta defasagem no sinal de
saída.
3. SEGUIDOR DE TENSÃO (BUFFER)
Vo
Vi
Este circuito apresenta uma altíssima impedância de entrada e uma baixíssima
impedância de saída.
Suas aplicações são:
Isolador de estágios;
Casador de impedâncias, etc.
9
4. SOMADOR
Rf
V1 R1
V2 R2
Vo
V3 R3
Cada entrada adiciona uma tensão na saída, multiplicada pelo seu componente
fator de ganho:
Rf
Rf
Rf
V0 V1
V2
V3
R
R
R
2
3
1
5. AMPLIFICADOR DIFERENCIAL OU SUBTRATOR
R2
V1
R1
R1
V0
V2
R2
Este circuito permite que se obtenha na saída uma tensão igual a diferença entre
os sinais aplicados, multiplicada por um ganho:
V0
R2
V2 V1
R1
10
Exercícios:
1. Qual é a faixa de ajuste de ganho de tensão no circuito abaixo?
500kΩ
V1
Vo
10kΩ
10kΩ
2. Que tensão de entrada produz uma saída de 2V no circuito abaixo?
1MΩ
V1 20kΩ
Vo
3. Qual a faixa das tensões de saída no circuito abaixo?
200kΩ
V1 20kΩ
Vo
(0,1 a 0,5V)
4. Que tensão de saída resulta, no circuito abaixo, para uma entrada de Vi= -0,3V?
V1
Vo
12kΩ
360kΩ
11
5. Que faixa de tensão de saída é desenvolvida no circuito abaixo?
V1=0,5V
Vo
10kΩ
200Ω
10kΩ
6. Calcular a tensão de saída produzida pelos circuitos abaixo:
a)
Rf=330kΩ
0,2V
33kΩ
-0,5V
22kΩ
0,8V
12kΩ
Vo
b)
100kΩ
Vo
Vi=1,5V
20kΩ
12
7. Calcular as tensões de saída V2 e V3 no circuito abaixo:
100kΩ
20kΩ
V2
0,2V
V3
200kΩ
10kΩ
8. Calcular a tensão V0.
100kΩ
Vi=0,1V
20kΩ
400kΩ
V0
10kΩ
20kΩ
13
CAPÍTULO 2 – APLICAÇÕES NÃO LINEARES COM AMP OP’s
2.1
COMPARADORES
Considerando que o ganho do amplificador de malha aberta é muito grande, mesmo
para valores de tensão muito pequenos a saída será limitada pelo valor de saturação do
AMPOP. Como a saída é dada por: V0 AMA (V V ) , quando V+ for maior que V-, a
saída será +VSAT, e quando V- for maior que V+, a saída será –VSAT.
V1
V0
V2
O uso de um comparador pode ser exemplificado como Sensor de Nível. Quando o
nível estiver acima (ou abaixo) do normal (valor de referência), o comparador emite um
sinal de saída para o sistema controlador.
2.1.1
Comparador Não-Inversor
V0
Vi
+VSAT
Vo
0
Vi
-VSAT
V , quando Vi 0
V0 SAT
VSAT , quando Vi 0
2.1.2
V1 0
V0 AMAVi
V2 Vi
Comparador Inversor
V0
+VSAT
Vi
Vo
0
Vi
-VSAT
V , quando Vi 0
V0 SAT
VSAT , quando Vi 0
V1 Vi
V0 AMAVi
V2 0
14
2.1.3
Comparador com referência não nula
V0
+VSAT
Vo
0
+
Vref
Vi
Vi
Vref
_
VSAT , quando Vi Vref
V0
VSAT , quando Vi Vref
2.1.4
-VSAT
V1 Vi
V0 AMA (Vref Vi )
V2 Vref
Comparador com tensão de saída limitada
Colocando-se um diodo Zener na saída do comparador, pode-se limitar V0 na
tensão de polarização reversa do diodo (normalmente 5,1V).
V1
V1
V0
V2
ou
V0
V2
Vi
V0
5,1
-0,7
Outra forma de limitar a tensão de saída do comparador é colocando dois diodos
Zener catodo-contra-catodo. Assim pode-se limitar tanto tensões positivas como
negativas em 5,1V.
V1
V0
V2
15
2.1.5
Detector de faixa
A combinação de um comparador inversor e um não-inversor resulta num circuito
chamado detector de faixa. Este circuito verifica se uma certa tensão de entrada Vi está
dentro de uma faixa delimitada por Va(REF INFERIOR) e Vb (REF SUPERIOR).
Vb
V0
Vi
Va
Quando a tensão de entrada se encontrar dentro da faixa supramencionada, a tensão
de saída será zero, caso contrario, ela será igual a +VSAT.
Exercícios:
Desenhar as formas de onda de saída dos circuitos abaixo, nos mesmos gráficos
onde estão representadas suas respectivas entradas.
Vi
a)
Vi
Vo
b)
Vi
Vi
Vo
c)
Vi
Vo
+
4V
4V
Vi
_
16
d)
Vi
V1
4V
V0
2V
e)
Vi
V1
4V
V0
3V
f)
Vi
V1
V0
4V
-4V
g)
V0
9V
Vi
3V
17
2.2
OSCILADORES
2.2.1
Operação Básica dos Osciladores
Vi
+
V0
A
_
Vf
β
O ganho total de um circuito com realimentação positiva, é dado Af, como:
Af
A
,
1 A
Já o ganho de malha é dado por:
Amf=Aβ
Os critérios para oscilação de um circuito realimentado, representado pela figura acima
são:
Amf(jω)=1, sendo: Amf j 1
e
Amf j 0
Se ωo for dado de forma que Amf j 0 , então:
a) Amf j 1
→
O sistema não oscila
b) Amf j 1
→
O sistema oscila
c) Amf j 1
→
Oscilação Distorcida
2.2.2
Oscilador com Ponte de Wien
Um circuito oscilador utiliza um circuito RC em ponte, com a freqüência do
oscilador determinada pelos componentes R e C.Os resistores R1, R2 e os capacitores C1,
C2 formam os elementos de ajuste da freqüência, enquanto os resistores R3 e R4 formam
parte do caminho de realimentação.
18
C1
R1
Vo
C2
R2
R3
R4
O circuito de realimentação deste oscilador é mostrado na figura abaixo.
+
Vo
R1
R2
C1
+
C2
Vf
_
_
Sendo o ganho β do circuito dado por:
jR2 C2
1 R2 R1C2 C1 j R2 C2 R1C1 R2 C1
2
O como este é um circuito não inversor o seu ganho de realimentação negativa é:
A 1
Para satisfazer o critério de oscilação:
A freqüência de oscilação será: f 0
R3
R4
Amf j 0 , onde Amf=Aβ
1
2 R1 R2 C1C 2
f0
. Se R1=R2 e C1=C2:
1
2RC
A característica que garante o ganho de malha suficiente para o circuito oscilar é
que:
19
R3 R1 C1
R4 R2 C2
Sendo assim,
R3
2,
R4
Portanto, uma razão entre R3 e R4 maior que 2 oferece um ganho de malha suficiente
para que o circuito oscile na frequência calculada para fo.
Exercícios:
1.
Calcular a freqüência de ressonância do oscilador com ponte de Wien da
figura abaixo.
0,001μF 51kΩ
Vo
0,001μF
51kΩ
300kΩ
100kΩ
2.
Esboce os elementos RC de um oscilador com ponte de Wien, como na figura
do exercício anterior para a operação em fo=10kHz.
3.
Calcular a freqüência do circuito oscilador com ponte de Wien, quando
R=10kΩ e C=2400pF.
4.
Projetar um oscilador com ponte de Wien, de tal modo que a freqüência do
sinal de saída possa ser ajustada numa faixa de 100Hz a 1kHz. Fazer os dois
capacitores iguais a 0,01μF.
20
2.3
MULTIVIBRADORES
2.3.1
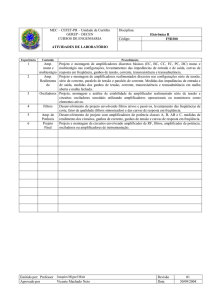
Operação Astável de um CI Temporizador 555
O CI 555 é o resultado de uma combinação de comparadores lineares e flip-flops
digitais, conforme mostra a figura 2.1.
Figura 2.1 – CI temporizador 555
Uma aplicação conhecida do CI temporizador 555 é como um multivibrador astável
ou circuito de clock. A análise seguinte da operação do 555 como um circuito astável
engloba detalhes das diferentes partes da unidade e de como as várias entradas e saídas
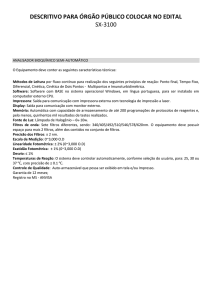
são utilizadas. A figura 2.2 mostra um circuito astável construído utilizando um resistor
externo e um capacitor para fixar o intervalo de temporização do sinal de saída.
Figura 2.2 – Multivibrador astável utilizando CI 555
21
O capacitor C carrega-se, tendendo ao valor VCC, através dos resistores externos RA e
RB. Como mostra a figura 2.2, a tensão do capacitor aumenta até ultrapasar 2VCC/3. Essa
tensão á a tensão limiar do pino 6, que leva o comparador 1 a disparar o flip-flop de
forma que a saída no pino 3 seja levada para nível baixo. Além disso, o transistor de
descarga é ligado, fazendo com que o capacitor seja descarregado através de RB pelo pino
7. A tensão do capacitor diminui, então, até cair abaixo do valor de disparo (VCC/3). O
flip-flop é disparado, a saída retorna para o nível alto e o transistor de descarga é
desligado, fazendo com que o capacitor possa novamente ser carregado através dos
resistores RA e RB pela fonte VCC.
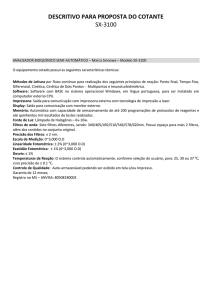
Figura 2.3 – Formas de onda referentes a um circuito astável
A figura 2.3 mostra as formas de onda no capacitor e na saída referentes a um
circuito astável. Os cálculos dos intervalos de tempo nos quais a saída é alta e baixa
podem ser feitos utilizando as relações:
TALTA 0,7RA RB C
TBAIXA 0,7RB C
O período total é:
T período TALTO TBAIXO
A freqüência do circuito astável é calculada então como:
f
1
1,44
T R A 2 RB C
22
Exemplo: Para o circuito da Figura 2.2, considerando RA=RB=7,5kΩ e C=0,1µF.
Determinar a freqüência de saída do mesmo e desenhar as suas formas de onda.
Utilizando as equações que determinam os períodos baixo e alto da oscilação:
TALTA 0,7R A RB C 0,7 7,5 10 3 7,5 10 3 0,1 10 6 =1,05ms
e
TBAIXA 0,7 RB C 0,7 7,5 10 3 0,1 10 6 =0,525ms
T=TALTA+TBAIXA=1,05ms+0,525ms=1,575ms
f
1
1
635Hz
T 1,575 10 3
2.3.2
Operação Astável com AmpOp
A implementação de um multivibrador astável com Amplificador Operacional, além
de ser uma alternativa ao CI 555, é muito comum na prática. De fato, o circuito básico de
um multivibrador astável com AmpOp necessita apenas de um capacitor e três resistores
externos, conforme se vê na figura 2.4.
23
R1
R
Vo
VZ1
C
R3
VZ2
R2
Figura 2.4 – Multivibrador Astável com AmpOp
Este circuito possibilita a geração de um sinal quadrado. Para a limitação da tensão
de saída, que a princípio seria +VSAT e –VSAT, coloca-se dois diodos idênticos (VZ1=VZ2) e
em oposição, conforme mostra a figura 2.4. A freqüência de saída do sinal pode ser
variada através do potenciômetro R1. E a freqüência f do sinal pode ser calculada pela
seguinte fórmula:
T
2R
1
2 R1C ln 1 2
f
R3
Exemplo: Um projetista deseja determinar a relação entre R2 e R3 no circuito da figura
2.4, de tal modo que a freqüência do sinal de saída do multivibrador astável possa ser
1
f
calculada pela seguinte fórmula
. Qual a relação procurada pelo projetista?
R1C
Se
Portanto:
T
2R
1
2 R1C ln 1 2 , então
f
R3
f
1
.
2 R2
2 R1C ln 1
R
3
1
1
2 R R1C
2 R1C ln 1 2
R3
2R 1
ln 1 2
R3 2
R2
0,3244
R3
24
Exercícios:
1. Para um circuito temporizador 555 conectado como um multivibrador astável,
com operação em 350Hz. Determinar o valor do capacitor C, necessário, utilizando
RA=RB=7,5kΩ.
2. Para um circuito temporizador 555 montado como mostrado na figura 2.1,
determinar os períodos TALTA e TBAIXA da forma de onda de saída; e a freqüência do
mesmo. Desenhar a forma de onda.
3. Para o circuito da figura 2.4 operar numa freqüência de 450Hz, se R3 for o dobro
do valor de R4, quanto será o valor de R1, considerando um capacitor C=0,001μF, ?
4. Qual será a freqüência de oscilação de um multivibrador astável, mostrado na
figura 2.4, fazendo R2=0,7R3; R1=22kΩ e C=0,1μF?
5. Qual será a relação entre R3 e R2, para que o circuito da figura 2.4 opere numa
freqüência de 246,63Hz , quando a relação R1C=0,01s?
25
CAPÍTULO 3 – FILTROS ATIVOS
Um filtro elétrico é um circuito capaz de atenuar determinadas freqüências do
espectro do sinal de entrada e permitir a passagem das demais.
3.1 DOMÍNIO DA FREQUÊNCIA
Chama-se espectro de um sinal a sua decomposição numa escala de amplitude
versus freqüência. Isto é feito através de séries de Fourier.
Exemplo: Considerando uma entrada Vi=1V, temos como saída Vo o gráfico da
figura 3.1.
Vo
5V
2π10
2π100
2π1000
ω(rad/s)
Quando a entrada Vi possui uma freqüência abaixo de 10Hz ou acima de 1000Hz,
sua saída é quase que completamente atenuada.
Quando a entrada Vi possui uma freqüência de 100Hz seu ganho é máximo, sendo
Vo cinco vezes maior que Vi.
3.2 FUNÇÃO DE TRANSFERÊNCIA
A função de transferência de um circuito é a relação de ganho do circuito no
V j
domínio da freqüência: H j o
A jB
Vi j
Onde:
H j A jB
B
H j tan 1
A
26
3.3 CLASSIFICAÇÃO
Os filtros podem ser classificados quanto à função que executa; quanto ao modelo
físico utilizado para sua execução e quanto a sua função resposta.
3.3.1 – Classificação quanto à sua função
Filtro Passa-Baixas: São aqueles que só permitem a passagem de freqüência
abaixo de uma freqüência determinada fc (denominada freqüência de corte). As
freqüências superiores são atenuadas
Filtros Passa-Altas: Só permitem a passagem de freqüência acima de uma
freqüência determinada fc. As freqüências acima são atenuadas.
Filtros Passa-Faixa: Só permitem a passagem das freqüências situadas numa faixa
delimitada por uma freqüência de corte inferior fc1 e outra fc2. As freqüências
situadas abaixo da freqüência de corte inferior ou acima da freqüência de corte
superior são atenuadas.
Filtro Rejeita Faixa: Só permite a passagem das freqüências situadas abaixo de
uma freqüência de corte inferior (fc1) ou acima de uma frequência de corte s
superior (fc2). A faixa de freqüência delimitada por fc1 e fc2 é atenuada.
Na figura 3.2 pode observar as curvas de resposta e freqüência para os quatro tipos
de filtros. Pode-se observar que existem as curvas ideais (que na prática são impossíveis
de serem realizados) e as curvas reais, que podem ser aproximações muito boas das
curvas ideais.
Figura 3.2
27
Para uma curva em freqüência existem algumas definições que devem ser
conhecidas:
Faixa de passagem: Faixa de freqüências que estão acima de 70,7% do ganho
máximo (definiu-se como ponto de corte o ponto onde a potência do sinal cai pela
metade). Esta redução de 70,7% também pode ser considerado como atenuação de 3dB,
V
onde o GdB 20 log i .
Vo
Faixa de transição: Faixa de freqüência entre a freqüência de corte e a freqüência
de passagem.
Faixa de Corte: Faixa de freqüências que estão abaixo de 10% do seu valor
máximo.
A figura 3.3 mostra uma curva com estes valores usando como exemplo um filtro
passa-baixas.
Figura 3.3
3.3.2 – Classificação quanto ao modelo físico utilizado
Quanto ao modelo físico utilizado são considerados três tipos de filtros:
Filtros passivos: São aqueles construídos apenas com elementos passivos,
tais como: resistores, capacitores e indutores. Tais filtros são inviáveis em
baixas freqüências, pois exigem indutores muito grandes.
Filtros Ativos: São aqueles construídos com alguns elementos passivos
associados a elementos ativos (válvulas, transistores e amplificadores
operacionais).
28
Filtros Digitais: Tais filtros utilizam componentes digitais como elementos
construtivos. Os sinais analógicos são convertidos em sinais digitais. Estes
são processados digitalmente com softwares em componentes digitais ou
computacionalmente e então convertido novamente para sinais analógicos.
Os filtros também são classificados por sua ordem, isto é pela ordem do polinômio
do denominador da sua função de transferência.
Exemplo: Filtro Ativo Passa-Baixas de primeira ordem:
Vi
Vo
R1
C
R3
R2
Figura 3.4
R2
R1
Enquanto que a relação da tensão de saída pela tensão de entrada é dada por:
Para o circuito da figura 3.4 o ganho K é dado por: K 1
1
Vi
Vo K
1
j
R
C
1
Portanto, seu ganho é dado como:
Vo
1
H j K
Vi
1 jR1C
Para que H j 0 , isto é, freqüência completamente atenuada (situação ideal),
com K≠0, o denominador da função de transferência deverá tender a infinito. Como isto
na prática é impossível, considera-se como freqüência de corte a freqüência na qual a
amplitude de ganho se reduz em 0,707 (como mencionado anteriormente), para isto o
denominador do módulo de H(jω) deverá ser igual a 2 , ou seja:
1 R1C 2
2
29
Para isto, faz-se: R1C 1 , como 2f
fc
1
2R1C
Para freqüências maiores que a freqüência de corte, o ganho será cada vez menor,
tendendo a zero.
Quanto maior a ordem do polinômio, ou seja a ordem do filtro, menor será a faixa
de transição do filtro real.
3.3.3 – Classificação quanto à função-resposta
Para que a à função resposta do filtro seja melhorada, além da ordem do
polinômio também podem existir diferentes tipos de polinômios no denominador do
mesmo, mudando assim a sua função de transferência. Para isto existem três tipos de
filtros com diferentes características:
Filtros Butterworth:
H j
k PB
1
c
2n
(aproximação para um filtro passa-baixa)
n=1,2,3,...
Onde n é a ordem do filtro, kPB é o ganho do filtro PB quando a freqüência é nula
e ωc é a freqüência de corte (ωc=2πfc).
A figura 3.5 mostra diferentes respostas em freqüências para diferentes ordens de
um filtro Butterworth Passa-Baixa.
A resposta Butterworth possui uma resposta plana (nenhum tipo de ondulação) na
faixa onde ω<ωc, sendo mais plana na região próxima à ω=0.
A taxa de atenuação destes filtros será de: TA 20n log , ou seja a cada
c
década de freqüência o filtro sofre uma atenuação de 20dB, para um filtro de primeira
ordem, 40dB por década para segunda ordem e assim por diante.
30
Figura 3.5
Filtros Chebyshev:
Estes filtros possuem uma taxa de atenuação muito maior que os filtros
Butteworth, porém possuem ondulações (ripples) na faixa de passagem. São
caracterizados pela seguinte função de transferência:
H j
k PB
1 E 2 C n2
c
(aproximação para um filtro passa-baixa)
n=1,2,3,... e (0<E≤1)
Onde kPB é o ganho para do filtro PB para freqüência nula; ωc é a freqüência de
corte; E é uma constante que define a amplitude (PR) dos ripples presentes na faixa de
passagem, e Cn é o chamado polinômio de Chebyshev, dado por:
Cn(ω)=2ωCn(n arc cosω)
A taxa de atenuação para os filtros Chebyshev é dada por:
TA 20 log E 6n 1 20n log
c
E a amplitude dos ripples (PR) em decibéis está relacionada com E através da
seguinte expressão:
PR(dB) 20 log 1 E 2
31
O valor de PR é utilizado para caracterizar o filtro de Chebyshev. Por exemplo:
filtro Chebyshev 0,5dB, filtro Chebyshev 1dB, etc. O máximo valor permitido para PR é
3dB (E≈0,99763).
A figura 3.6 mostra a curva de resposta em freqüência do ganho para vários
valores de n para os filtros Chebychev.
Figura 3.6
Filtros Elépticos:
Os filtros Elípticos apresentam ripples tanto na faixa de passagem como na faixa
de corte. Todavia, são os que têm melhor definição em termos de freqüência de corte. Em
outras palavras, a sua faixa de transição é bastante estreita. Esse tipo de filtro é muito
utilizado em equipamentos que exigem alta precisão no ponto de corte, bem como uma
atenuação acentuada na faixa de corte.
A figura 3.7 mostra a curva de resposta para um filtro Elíptico PB de quinta
ordem, com ωc=1rad/s.
Figura 3.7
32
Exercício: Para os circuitos abaixo achar a sua respectiva função de transferência.
1.
Vi
Vo
C
R1
R3
R2
2.
Vi
R1
Vo
C
C
R3
R1
R3
R2
R2
33
REFERÊNCIAS BIBLIOGRÁFICAS
1
PERTENCE JÚNIOR., A. Amplificadores Operacionais e Filtros Ativos.
Porto Alegre:Bookman, 6 Ed., 2003.
2
BOYLESTAD, RL; NASHELSKY, L. Dispositivos Eletrônicos e Teoria de
Circuitos. São Paulo: Prentice-Hall do Brasil, 8ª Edição, 2004.
3
BERLIM, HM. Projetos com Amplificadores Operacionais. São Paulo: Editora
Técnica Eletrônica Ltda.
34