UNIVERSIDADE FEDERAL DE LAVRAS
DEPARTAMENTO DE CIÊNCIA DA COMPUTAÇÃO
Orientador: Prof Wilian Soares Lacerda
Desenvolvimento de uma Unidade
Processadora Discreta Microprogramável
Bolsista: Edna Mie Kanazawa
Relatório Final apresentado à
Universidade Federal de Lavras, como
parte das exigências do PIBIC/CNPq,
referente ao período de setembro/1999
à julho/2000.
LAVRAS
MINAS GERAIS – BRASIL
AGOSTO/2000
UNIVERSIDADE FEDERAL DE LAVRAS
DEPARTAMENTO DE CIÊNCIA DA COMPUTAÇÃO
Desenvolvimento de uma Unidade Processadora Discreta Microprogramável
RESUMO DOS OBJETIVOS E RESULTADOS
Atualmente, com os computadores digitais fazendo parte do nosso cotidiano, se faz
necessário o perfeito entendimento de seu funcionamento tanto interno, como sua interação
com o mundo externo. Mais e mais desenvolvem-se tecnologias para que se obtenha
processamentos mais velozes. Mas entre todas as tecnologias já desenvolvidas, observa-se
que a arquitetura dos computadores digitais atuais segue a arquitetura dos primeiros
computadores eletrônicos: Arquitetura de Von Newmann.
Neste projeto, objetivou-se o estudo e o desenvolvimento de um protótipo de
processador utilizando-se esta arquitetura, para a implantação de novas técnicas de
processamento. O projeto dividiu-se em: estudo das arquiteturas existentes,
desenvolvimento do processador com base no estudo realizado, elaboração dos circuitos
eletrônicos, simulação dos circuitos, estudo e criação das instruções do processador,
montagem em wire-wrap utilizando-se chips comerciais e teste do protótipo. Os circuitos
dividiram-se em: Contador de programa e Apontador de pilha, Contador em anel, Gerador
de clock e inicialização, Registrador de endereço de memória, Microprogramação, Unidade
lógica aritmética e Portas de entrada e saída. Utilizou-se o software de simulação
MAXPLUS II da ALTERA, para verificar o perfeito funcionamento dos circuitos
desenvolvidos. As instruções implementadas em microprograma dividiram-se em:
Instruções aritméticas (ADI, SUB, INC, DEC e CMP), Instruções lógicas (ANI, ORI, XRI,
XRA e CMA), Instruções de transferência de dados (LDA, LDI e STA), Instruções de
desvio (JMP, JZ, JEQ, JS, JNZ, JNEQ e JNS) e Instruções de chamadas e retorno de subrotinas (CALL e RET). Através destas instruções desenvolveu-se programas em assembly
para execução no protótipo.
O protótipo montado tem atendido as expectativas esperadas conforme a simulação,
além de poder proporcionar um método de estudo e desenvolvimento de novas técnicas de
arquiteturas de processadores digitais.
___________________________
Prof. Wilian Soares Lacerda
Orientador
___________________________
Edna Mie Kanazawa
Bolsista
2
AGRADECIMENTOS
Ao orientador, Wilian Soares Lacerda que tornou possível o desenvolvimento da
Unidade Processadora Discreta Microprogramável.
Aos professores, que ajudaram de diversas formas a implementar e a construir o
protótipo.
3
Índice
1 Introdução
06
2 Revisão de Literatura
08
3 Caracterização do Problema e sua Importância
09
4 Objetivos
09
5 Metodologia
10
6 Resultados e Discussões
10
6.1 Funcionamento
10
6.2 Unidade de Controle
13
6.3 Memória
13
6.4 Unidade Lógica Aritmética
14
6.5 Registrador de Endereços
15
6.6 Contador de Programa e Apontador de Pilha
15
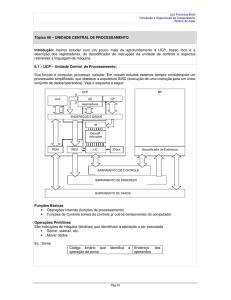
6.7 Descrição simplificada dos componentes utilizados no projeto
16
6.7.1 Descrição do CI 74161
16
6.7.2 Descrição do CI 74191
18
6.7.3 Descrição do CI 74173
19
6.7.4 Descrição do CI 74157
19
6.7.5 Descrição do CI 74181
20
6.8 Tabela de instruções
20
6.9 Descrição dos sinais ativos durante o ciclo de busca
22
6.10 Descrição dos sinais ativos durante a instrução ADI <valor>
23
6.11 Descrição dos sinais ativos durante a instrução LDA <endereço>
26
6.12 Descrição dos sinais ativos durante a instrução STA <valor>
27
6.13 Descrição dos sinais ativos durante a instrução SUBI <valor>
29
6.14 Descrição dos sinais ativos durante a instrução INC A
30
6.15 Descrição dos sinais ativos durante a instrução DCR A
30
6.16 Descrição dos sinais ativos durante a instrução LDI <valor>
30
6.17 Descrição dos sinais ativos durante a instrução ANI <dado>
30
6.18 Descrição dos sinais ativos durante a instrução ORI <dado>
31
6.19 Descrição dos sinais ativos durante a instrução XRI <dado>
31
6.20 Descrição dos sinais ativos durante a instrução XRA
31
4
6.21 Descrição dos sinais ativos durante a instrução CMA
31
6.22 Descrição dos sinais ativos durante a instrução JMP < endereço >
32
6.23 Descrição dos sinais ativos durante a instrução JZ, JC, JS,JEQ <endereço> 32
6.24 Descrição dos sinais ativos durante a instrução CALL < endereço >
33
6.25 Descrição dos sinais ativos durante a instrução RET
33
6.26 Descrição dos sinais ativos durante a instrução CMP <dado>
33
6.27 Descrição dos sinais ativos durante a instrução ADD < endereço >
34
6.28 Descrição dos sinais ativos durante a instrução SUB <endereço>
34
6.29 Descrição dos sinais ativos durante a instrução INA
34
6.30 Descrição dos sinais ativos durante a instrução IND
34
6.31 Descrição dos sinais ativos durante a instrução OUTA
35
6.32 Descrição dos sinais ativos durante a instrução OUTD
35
6.33 Descrição dos sinais ativos durante a instrução HALT
35
6.34 Descrição dos sinais ativos durante a instrução PUSH
35
6.35 Descrição dos sinais ativos durante a instrução POP
35
7 Referências Bibliográficas
37
Anexos
A - Esquemas dos circuitos eletrônicos
B - Tabelas de códigos das instruções
C - Resultados da simulação
D - Folha de dados dos componentes eletrônicos
5
1 Introdução
A Unidade Processadora Discreta Microprogramável é um protótipo desenvolvido
dentro do estudo de várias arquiteturas de processadores digitais. Neste estudo observou-se
que a maioria das arquiteturas segue a arquitetura dos primeiros computadores eletrônicos,
ou seja, na Arquitetura de von Neumann. O objetivo do projeto baseia-se no
desenvolvimento de um protótipo de um microprocessador com uma arquitetura simples e
de fácil entendimento, para o desenvolvimento de tecnologias mais avançadas.
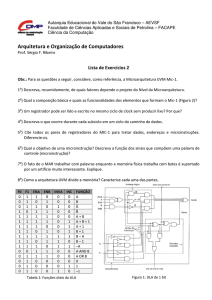
Na figura 1 apresentamos blocos com as partes básicas que constituem o protótipo
do microprocessador. Observa-se que o processador gerencia todos os componentes
externos (portas de entrada /saída e memória).
Figura1 – Componentes que constituem o protótipo do microprocessador
Em geral o computador básico constitui-se de 3 partes: Unidade Central de
Processamento (CPU), Portas de Entrada /Saída e Memórias.
A CPU contém elementos de armazenamento (registradores), circuitos
computacionais representado pela Unidade Lógica Aritmética (ULA), Circuitos de
Controle e Temporização.
As funções primárias da CPU são:
- Buscar, decodificar, e executar instruções do programa armazenado na
memória;
- Transferir dados da e para memória e para portas de entrada e saída;
- Prover os sinais de controle e temporização para todo o sistema.
A Unidade Lógica Aritmética da CPU executa operações como somar, deslocar,
rodar, comparar, incrementar, decrementar, negar, AND, OR, XOR, complementar e zerar.
Para a execução de uma operação de soma, a ULA utiliza dois registradores (Acumulador
e Temporário). O conteúdo do Acumulador é somado com o conteúdo do registrador
temporário e o resultado é enviado ao acumulador. De grande importância para o
programador é o registrador de código de condição dos flags. Os flags incluem indicadores
de zero, de resultado negativo, de vai-um, etc. Os flags são usados para tomadas de decisão
quando posteriormente, se usam instruções de desvio.
Os registradores temporário e acumulador podem ser considerados parte da
ULA.
6
A seção de CONTROLE E TEMPORIZAÇÃO é a parte mais complexa e afeta
todos os eventos da CPU no microcomputador. Cada instrução do programa pode ser
dividida em estágios de busca, decodificação e execução. Esses pequenos estágios ainda
podem ser subdivididos em outros passos que podem ser chamadas de microprograma. O
microprograma para cada instrução reside na seção de decodificação de instruções e é
executado pela seção de controle e temporização da CPU.
A sequência de busca-decodificação-execução de instrução é fundamental para a
operação do computador. A primeira instrução buscada da memória de programa é tomada
como sendo o código de operação da primeira instrução e é colocada no registrador de
instruções pela seção de controle da CPU. O código, é então, interpretado pelo
decodificador de instrução. O decodificador de instruções identifica o microprograma que
a seção de controle e temporização deve seguir para executar uma instrução específica.
Existe um conjunto de instruções que o microprocessador pode executar.
As instruções podem ser classificadas de diversas maneiras:
1. Instruções aritméticas
2. Instruções lógicas
3. Instruções de transferência de dados
4. Instruções de desvio
5. Instruções de chamada de sub-rotina
6. Instruções de retorno
7. Instruções de pilha
1.
2.
3.
4.
5.
6.
Nas instruções aritméticas temos:
Somar, Somar com vai -um
Subtrair, Subtrair com vai-um , Empréstimo
Incrementar
Decrementar
Comparar
Negar
1.
2.
3.
4.
Nas instruções lógicas temos:
AND
OR
XOR
NOT
1.
2.
3.
4.
Nas instruções de transferência e dados temos:
Carregar
Armazenar
Mover
Zerar
1.
2.
3.
4.
5.
6.
Nas instruções de desvio temos:
Desvio Incondicional
Desvio de zero
Desvio se não zero
Desvio se igual
Desvio se desigual
Desvio se positivo
7
7. Desvio se negativo
Nas instruções de pilha temos:
1. Empilhar
2. Desempilhar
2 Revisão de Literatura
Segundo Tokheim, “Em relação à Eletrônica, o estudante de hoje ou o especialista
de amanhã deve ter um conhecimento de microprocessadores e de sistemas baseados em
microprocessadores. Isto inclui conhecimentos tanto em software como de hardware. O
microprocessador é a base de toda uma linguagem de máquinas e dispositivos inteligentes.
O microprocessadores serão encontrados em diversos produtos: de brinquedos a
processadores de palavras; de computadores de bolso a eletrodomésticos; de robôs
industriais a termostatos. Com o advento de microprocessadores microprogramáveis
espera-se no futuro uma aceleração do desenvolvimento das máquinas inteligentes. ”
Nosso cotidiano está sendo domado cada vez mais por máquinas inteligentes e para
desenvolvimento de máquinas mais velozes e mais eficientes temos que ter um
conhecimento básico de como a informação é processada por essas máquinas.
Vários autores [TOKHEIM, TAUB, MALVINO] descrevem as seguintes
arquiteturas: 8080/8085 da Intel e 6800 da Motorola, pois não apresentam tanta
sofisticação e apresentam-se adequadas para apresentação introdutória a microprocesadores
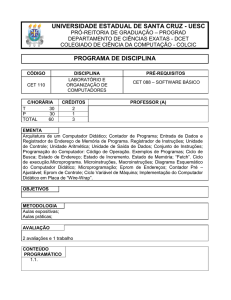
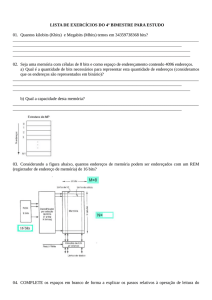
Segundo Stalling, a organização básica de um sistema de computador constitui-se
de Unidade Central de Processamento conectada aos barramentos de dados, endereços e
controle, como ilustrado na figura 2.
Figura 2 – Organização básica de um computador
A estrutura é o caminho pelo qual os componentes são relacionados e a função é
operar cada componente individualmente como parte da estrutura.
Operações básicas em um computador:
- Processamento de dados;
- Armazenamento de dados;
- Transferência de dados;
- Controle.
A estrutura deve compor-se de 4 componentes:
- Unidade Central de Processamento (CPU);
- Memória Principal;
8
-
I/O – Transfere dados entre o computador e o meio externo;
Sistema de comunicação.
A parte mais complexa do processador (CPU) é a sua unidade de controle
responsável pela geração dos sinais de sincronismo de todos os circuitos do processador.
Na literatura [ZUFFO, HAYES] temos descrito várias soluções para implementação da
unidade de controle. Algumas técnicas permitem que a unidade de controle seja mais
versátil para modificações e ampliação, como a técnica de microprogramação. Por isto o
processador desenvolvido é microprogramável.
Hennessy e Patterson descrevem em suas obras detalhes para projeto de
processadores mais rápidos, utilizando técnicas de pipeling. O projeto do processador se
torna bem mais complexo, para se conseguir este objetivo. No protótipo desenvolvido, esta
técnica não foi utilizada por dificuldades de implementação.
3 Caracterização do Problema e sua Importância
O desenvolvimento do protótipo da Unidade Processadora Discreta
Microprogramável, divide-se em diversas partes funcionais tais como: Contador de
Programa e Apontador de Pilha, Contador em Anel, Gerador de Clock, Registrador de
Endereço, Microprogramação, Unidade Lógica Aritmética e Portas de Entrada/Saída. Cada
parte foi devidamente estudada, esquematizada, simulada e implementada dando origem ao
sistema. Esta divisão é importante, pois ao analisar o processamento de uma instrução é
possível identificar quais partes estão sendo envolvidas para execução da instrução.
A compactação das arquiteturas de computadores atuais e a velocidade com que as
informações são processadas, dificulta a visualização e o entendimento do seu
funcionamento. Com o Desenvolvimento da Unidade Processadora Microprogramável, que
possui uma arquitetura simples e onde a velocidade e a compactação dos circuitos não são
itens essenciais, é possível verificar e entender como as informações são processadas.
Com o protótipo em funcionamento, torna-se possível este entendimento básico de
processamento e muitos caminhos poderão ser abertos para o desenvolvimento de outras
arquiteturas com tecnologias mais avançadas, pois o requisito básico já foi fixado.
4 Objetivos
O presente projeto tem como meta os seguintes objetivos:
-
Estudo das técnicas de arquitetura para processador digital.
Desenvolvimento de um protótipo de processador digital.
Implementação de várias técnicas de arquitetura de processadores digitais.
Testes de novas técnicas de arquitetura.
Divulgar o estudo e pesquisa na área de arquitetura de processadores digitais dentro e
fora do departamento.
Formar uma equipe de pesquisa no departamento para atuar na área de arquitetura de
processadores e computadores.
Propor novas pesquisas na área de projetos e desenvolvimentos de arquitetura de
processadores e computadores.
9
5 Metodologia
Para atender os objetivos do presente projeto, foi adotado a seguinte metodologia:
a) O estudo das técnicas de arquitetura de processadores foi realizado através de pesquisa
bibliográfica em livros, artigos, revistas, e internet. Também foram feitos contatos com
pesquisadores da área para troca de informações, visando um intercâmbio e
aproximação com pessoas da área.
b) O projeto do protótipo do processador digital desenvolveu-se inicialmente através do
detalhamento em diagrama de circuitos eletrônicos. O circuito eletrônico foi desenhado
em computador PC utilizando-se a ferramenta específica denominada Tango.
c) Com o circuito definido, passou-se para a fase de simulação em computador utilizandose software com esta finalidade (Maxplus II).
d) Retornou-se a etapa de projeto para correção dos circuitos, devido a alguns problemas
apresentados durante a simulação.
e) Sanados todos os problemas de simulação, iniciou-se a fase de implementação do
circuito eletrônico utilizando-se montagem em placas de wire-wrap.
f) Terminado a montagem, passou-se para a etapa de testes em laboratório com o uso de
instrumentos de medição (multímetros, osciloscópios).
g) Problemas ocorridos durante os teste em laboratório, fez rever e corrigir a simulação e
a etapa de projeto.
6 Resultados e Discussões
Estudou-se várias arquiteturas de processadores já existentes e sua evolução,
observando as características de cada arquitetura concluiu-se que a maioria seguem a
arquitetura de Von Newmann.
Após estudos realizados, foram feitos diagramas que descrevem o funcionamento
geral e um diagrama detalhado de cada bloco. Abaixo segue a descrição do funcionamento.
6.1 Funcionamento
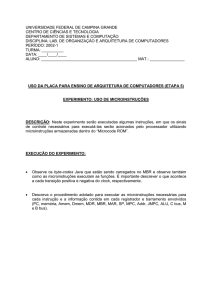
Na figura 3 temos o diagrama em blocos do protótipo do processador.
10
Figura 3 – Diagrama em blocos do protótipo
Os sinais gerados pelo circuito de sincronismo afeta todos os eventos da CPU. Por
isso antes de explicar o funcionamento do projeto daremos uma breve explicação no
circuito de sincronismo.
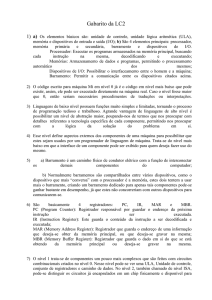
O Gerador de Clock e Contador em Anel fazem parte do circuito de sincronismo.
Na figura 4 temos o diagrama em blocos do circuito de sincronismo, e também os sinais
gerados em cada bloco.
O Gerador de Clock possui duas opções: clock automático, onde temos um onda
quadrada de 1kHz, e o clock manual onde pulsos são gerados através de uma chave. Com o
clock manual podemos executar uma instrução passo a passo.
No Contador em Anel temos as saídas T1, T2, T3, T4 que determinam o ciclo de
busca e execução da instrução. A saída do Contador em Anel pode ser visualizada na
figura 5. Observe que T4 permanece em nível alto até que as microinstruções da instrução
sejam executadas.
11
Figura 4 – Diagrama em blocos do circuito de Sincronismo
Figura 5 – Formas de onda dos sinais de sincronismo
Em T1 o endereço apontado pelo Contador de Programa é armazenado no
registrador de endereços. Em T2 o Contador de Programa é incrementado, ou seja aponta
para o endereço da próxima instrução. Em T3 o endereço armazenado no Registrador de
Instruções é transferido para o barramento de endereços e a memória é habilitada para
leitura. O conteúdo da memória deve corresponder a um código de uma instrução, cujo
valor é armazenado no Registrador de Instruções. T4 corresponde ao ciclo de execução da
instrução. O ciclo de execução pode durar até 13 ciclos de clock, controlados por um
contador, ou seja em T4 são executadas as microinstruções de uma instrução. A sequência
de microinstruções é executada até que o sinal de controle FIM seja ativado pelo circuito
de microprogramação, e um novo ciclo de busca e execução é iniciado.
No circuito de microprogramação projetado podemos ter 127 instruções diferentes.
Cada instrução pode desenvolver-se dentro de 13 ciclos de microinstruções. O ciclo de
busca, corresponde à três ciclos de clock. Se o bit mais significativo do código da instrução
estiver ativo, ou seja em 1 (um) teremos instruções de desvio condicional.
12
6.2 Unidade de Controle
A Unidade de Controle é composta pelo Registrador de Instruções, Contador
Síncrono e por Memórias Eprom’s, conforme figura 6.
Em T1 o contador é zerado e em T4 a instrução é carregada no registrador de
instruções.
O bit MA11 = 1 indica que temos uma instrução de desvio condicional será
executada. E o bit MA4 indicará o estado do flag que estará sendo analisado. Pelas linhas
MA5 e MA6 estaremos selecionando o flag desejado.
MA5
0
0
1
1
MA6
0
1
0
1
Flag
/VAI-UM
IGUAL
/ZERO
SINAL
O Multiplexador foi colocado para minimizar os endereços redundantes
apresentados quando uma instrução de desvio for executada.
Sinais de controle:
- /RICARGA – Armazena o conteúdo do barramento de dados, no registrador de
instruções, na transição positiva do /CLOCK e quando T4 estiver ativo.
Figura 6 – Diagrama em blocos da Unidade de Controle
6.3 Memória
No circuito da Memória RAM é possível programá-la por meio de chaves. Assim é
possível o armazenamento de programas. Além disso temos 8 páginas de memórias que
podem ser selecionadas por meio de chaves.
Sinais de controle:
- MEMHAB – Habilita a memória
- MEML/E – Em nível alto temos leitura, onde o conteúdo do endereço
selecionado é transferido para o barramento de dados, caso contrário temos
escrita em memória, onde o conteúdo do barramento de dados é armazenado no
endereço indicado.
As linhas de endereço de A7 à A10 determinam as páginas de memória.
13
Figura 7 – Diagrama em blocos da Memória
6.4 Unidade Lógica Aritmética
A Unidade Lógica Aritmética, mostrada na fugura 8, é responsável em realizar as
diversas operações do processador.
Sinais de controle:
- /RACARGA – Habilita a transferência do conteúdo do barramento de dados
para o Acumulador, quando houver uma transição positiva do /CLOCK.
- /RBCARGA - Habilita a transferência do conteúdo do barramento de dados
para o Acumulador, quando houver uma transição positiva do /CLOCK.
- MODOULA – Define o modo (aritmético = 1 ou lógico = 0) de operação da
ULA.
- S0, S1, S2 – define o tipo de operação a ser realizada.
- /FLAG – Armazena o estado dos flags no registrador de flags.
- /UM – Define o carry-in.
- /ULALER – Habilita a transferência do resultado para barramento de dados.
Figura 8 – Diagrama em blocos da Unidade Lógica Aritmética
14
6.5 Registrador de Endereços
No Registrador de Endereços (figura 9) temos armazenado o conteúdo do Contador
de Programa.
Sinais de controle:
- /RECARGA – Habilita o armazenamento do dado no registrador.
- /RELER – Habilita a transferência do conteúdo armazenado para o barramento
de endereços.
Figura 9 – Diagrama em blocos do Registrador de Endereços
6.6 Contador de Programa e Apontador de Pilha
O Contador de Programa indica o endereço da próxima instrução a ser executada. O
Apontador de Pilha indica o endereço da pilha onde foi armazenado o valor do Contador de
Programa antes dele iniciar uma subrotina. Ele também é utilizado nas instruções de PUSH
e POP, onde os dados são armazenados e/ou retirados de uma pilha. Vide figura 10.
Sinais de controle:
- /CPCARGA – Carrega o contador com o dado do barramento de dados.
- CPHAB – Habilita a contagem.
- /CPLER – Habilita a transferência do dado do contador para o barramento de
dados.
- /LIMPA – O contador é zerado.
- /APCARGA - Carrega o apontador de pilha com dado do barramento de dados.
- APD/I – Habilita contagem crescente ou decrescente.
- /APLER – Habilita a transferência do dado do contador para o barramento de
dados.
15
Figura 10 - Diagrama em blocos do Contador de Programa e Apontador de Pilha
Baseado no resultado acima obtido, realizou-se um estudo de quais tipos e
especificações de componentes poderiam ser utilizados na elaboração da Unidade
Processadora Discreta Microprogramável.
Tendo todos os dados necessários para o detalhamento do diagrama dos circuitos
eletrônicos e utilizando-se a ferramenta TANGO, esquematizou-se todos os circuitos
necessários para o funcionamento da Unidade Processadora Discreta Microprogramável.
Os esquemas dos circuitos eletrônicos encontram-se no ANEXO A.
Na fase de simulação, utilizou-se a ferramenta MAXPLUS II. Simulou-se cada
circuito separadamente, controlando as linhas de controle manualmente.
Muitos problemas encontrados na simulação, foram corrigidos aperfeiçoando-se os
circuitos. Devido a correção de muitos erros na simulação, obteve-se uma maior facilidade
na montagem dos circuitos.
Encontrou-se problemas de atrasos provocados pelos componentes reais, que não
foram detectados durante a simulação, e que foram sanados com o estudo de outros
componentes que foram inseridos para correção dos erros reais.
Atualmente o protótipo encontra-se montado e em funcionamento, conforme
previsto. Foram realizados testes com a implementação das instruções a nível de
microprogramação.
6.7 Descrição simplificada dos integrados utilizados no projeto
6.7.1 Descrição do CI 74161 – Contador binário de 4 bits crescente préestabelecível
Figura 11 – Principais pinos do CI 74161
16
A, B, C, D
QA, QB,
QC, QD
CLK
CLR
LOAD
ENP, ENT
Entrada da contagem inicial
Saída da contagem
Entrada de clock ; sensível a transição positiva
Entrada de controle; ativa em nível lógico zero; quando
ativado leva as saídas a nível lógico zero; não depende do
clock
Entra de controle; ativo em nível lógico zero; quando
ativado desabilita a contagem e carrega as saídas com o
valor das entradas na transição positiva do clock
Entradas de controle; ativo em nível alto; ambas devem
estar ativadas para habilitar a contagem; ENT desativado
força a saída RCO para nível lógico zero
Tabela 1 – Descrição dos principais pinos do CI 74161
17
6.7.2 Descrição do CI 74191 – Contador de 4 bits crescente/decrescente préestabelecível sensível à transição positiva do clock
Figura 12 - Principais pinos do CI 74191
/CTEN
D/U
LOAD
MAX/MIN
/RCO
QA, QB,
QC, QD
A, B, C, D
entrada de controle; nível lógico zero habilita contagem; nível
lógico um desabilita a contagem; trocas de nível devem ser feitas
apenas quando a entrada de clock está em nível um
entrada de controle; nível lógico zero a contagem é crescente;
nível lógico um a contagem é decrescente; deve-se evitar troca de
nível enquanto o clock está em nível lógico zero
entrada de controle; nível lógico zero faz com que o dado de
entrada seja carregado na saída independente do clock
saída; produz nível lógico um com um período ciclo de clock
quando a contagem é 0000 ou 1111; é utilizado para permitir
“look - ahead”para operação alta velocidade
saída; produz um nível lógico zero com uma largura igual a
porção nível zero do clock quando a saída é 0000 ou 1111; é
utilizado para ligar dois mais contadores em cascata através de
CTEN ou CLK; poderá ocorrer um falso RCO se o clock e CTEN
são zero e D/U é um durante um pulso de LOAD
saída de contagem, 4 bits, flips-flops mestre escravo; muda de
estado na transição positiva do clock
entrada de dados; é carregado para a saída quando a entrada
LOAD vai para nível lógico zero
Tabela 2 – Descrição dos principais pinos do CI 74161
18
6.7.3 Descrição do CI 74173 – Registrador de 4 bits
Figura 13 - Principais pinos do CI 74173
D
Q
CLK
CLEAR
G1, G2
M, N
Entrada de dados
saída e dados
Entrada de clock; sensível a transição positiva
Entrada de controle; ativo em nível alto; limpa as saídas de
daos; não depende do clock
Entradas de seleção; o dado só será registrado ne transição
positiva do clock se estas duas entradas estiverem em nível
lógico zero
Entradas de controle; ativas em nível lógico um; se uma destas
entradas for para um, então as saídas Q irão para tree-state.
Tabela 3 – Descrição dos principais pinos do CI 74173
6.7.4 Descrição do CI 74157 – Multiplexador 2x1
Figura 14 - Principais pinos do CI 74157
19
Y
A
B
G
A/B
Saída de dados (4 bits)
Entrada de dados (4 bits)
Entrada de dados (4 bits)
Entrada de controle; ativo em nível baixo; responsável
pela seleção do chip; em nível alto força as saídas Y
para nível zero
Entrada de controle; seleciona qual entrada de dados
será aplicada na saída
Tabela 4 – Descrição dos principais pinos do CI 74157
6.7.5 Descrição do CI 74LS181 – Unidade Lógica Aritmética
Figura 15 - Principais pinos do CI 74181
A0 – A3
B0 – B3
S0 – S3
F0 – F3
Cn
Cn+4
A=B
M
Entrada de dados
Entrada de dados
a partir destas entradas seleciona-se as operações
Saídas de dados
Carry de entrada
Carry de saída
Indica o estado do carry de igualdade
Um nível lógico alto desabilita o carry interno
Tabela 5 – Descrição dos principais pinos do CI 74181
Os componentes utilizados têm seus dados descritos com mais detalhes nas folhas
de dados dos componentes no Anexo C.
6.8 Tabela de Instruções
Na Tabela 6 temos descritas as instruções desenvolvidas para o protótipo, bem
como seu código e sua descrição. No Anexo B apresenta-se com todas as palavras de
controle geradas pela Unidade de Controle por cada uma das instruções desenvolvidas.
20
Instrução
ADI, <valor>
SUBI, <valor>
INC A
DCR A
LDI <valor>
LDA <endereço>
STA <endereço>
ANI <dados>
ORI <dados>
XRI <dados>
XRA
CMA
JMP <endereço>
JZ <endereço>
JC <endereço>
JS <endereço>
JEQ <endereço>
JNZ <endereço>
JNC <endereço>
JNS <endereço>
JNEQ <endereço>
CALL endereço
RET
CMP <dado>
ADD <endereço>
SUBD <endereço>
INA
IND
OUTA
OUTD
HALT
Código
05
06
07
08
04
09
10
11
12
13
14
15
16
82
91
A7
E5
B3
C1
D6
F4
17
18
19
20
21
22
23
24
25
26
Descrição
A <- A + <valor>
A <- A - <valor>
A <- A + 1
A <- A - 1
A <- <valor>
A <- conteúdo do endereço
<endereço> <- conteúdo do acumulador
A <- A AND <dados>
A <- A OR <dados>
A <- A XOR <dados>
A <- A XOR A (zera o acumulador)
A <- complemento de A
PC <- endereço
se /ZERO = 0 PC <- endereço
se /VAI-UM = 0 PC <- endereço
se SINAL = 1 PC <- endereço
se IGUAL =1 PC <- endereço
se /ZERO =1 PC <- endereço
se /VAI-UM = 1 PC <- endereço
se SINAL = 0 PC <- endereço
se IGUAL = 0 PC <- endereço
PC <- endereço / AP <- PC
CP <- AP
compara A com <dado> e seta flag de igual se A = dado
A <- A + conteúdo do endereço
A <- A - conteúdo do endereço
A <- entrada analógica
A <- entrada digital
saída analógica <- A
saída digital <- A
Parada
Tabela 6 – Tabela de Instruções
21
6.9 Descrição dos sinais ativos durante o ciclo de busca
No ciclo de busca o código da instrução é carregado no Registrador de instruções
para que as microinstruções sejam executadas. A seguir descreve-se as fases do ciclo de
busca.
Primeira fase do ciclo busca, sinais ativos:
- /CPLER – o conteúdo do contador de programa é transferido para o barramento
de dados
- /RECARGA – o dado disponível no barramento de dados é carregado no
registrador de endereços
Segunda fase do ciclo busca, sinais ativos:
- CPHAB – o contador de programa é incrementado
Terceira fase do ciclo busca, sinais ativos:
- /RELER – o conteúdo armazenado no registrador de endereços é transferido
para o barramento de endereços
- MEMHAB – habilita a memória RAM para leitura, transferindo o conteúdo do
endereço disponibilizado para o barramento de dados (o conteúdo corresponde
ao código de uma instrução)
- /RICARGA – o dado é carregado no registrador de instruções
Após a execução do ciclo de busca executa-se as microinstruções da instrução
carregada no registrador de instruções.
Na Figura 16a, 16b, 16c é possível visualizar os sinais ativos do ciclo de busca a
cada ciclo de clock.
22
16a – Primeira fase do ciclo de busca
16b – Segunda fase do ciclo de busca
16c- Terceira fase do ciclo de busca
6.10 Descrição dos sinais ativos durante a instrução ADI <valor>
Na instrução ADI <valor> o valor indicado é imediatamente somado ao conteúdo
do acumulador. A seguir descreve-se as microinstruções executadas a cada ciclo de clock
da instrução ADI <valor>.
Primeira microinstrução da instrução ADI <valor>, sinais ativos:
- /CPLER – o conteúdo do contador de programa é transferido para o barramento
de dados
- /RECARGA – o dado disponível no barramento de dados é carregado no
registrador de endereços
23
Segunda microinstrução da instrução ADI <valor>, sinais ativos:
- /RELER – o conteúdo armazenado no registrador de endereços é transferido
para o barramento de endereços
- MEMHAB - habilita a memória RAM para leitura, transferindo o conteúdo do
endereço disponibilizado para o barramento de dados
- /RBCARGA – o dado disponível no barramento de dados é transferido para o
registrador B
Terceira microinstrução da instrução ADI <valor>, sinais ativos:
- S0, S1, S2, S3 – são setados para realizar a operação de soma, que corresponde
ao código 9 em binário, ou seja 1001
- /MODOULA – modo de operação da ULA (1 – Lógico e 0 – Aritmético)
- /FLAG – armazena-se no registrador de flags o estados destes ao realizar a
operação
Quarta microinstrução da instrução ADI <valor>, sinais ativos:
- S0, S1, S2, S3 – são setados para realizar a operação de soma, que corresponde
ao código 9 em binário, ou seja 1001
- /MODOULA – modo de operação da ULA (1 – Lógico e 0 – Aritmético)
- /ULALER – o resultado da operação é transferido para o barramento de dados
- /RACARGA – armazena-se no acumulador o resultado da operação
Quinta microinstrução da instrução ADI <valor>, sinais ativos:
- CPHAB – o contador de programa é incrementado
Sexta microinstrução da instrução ADI <valor>, sinais ativos:
- FIM – finalização da instrução, início de um novo ciclo de busca
Na Figura 17a, 17b, 17c, 17d, 17e é possível visualizar os sinais ativos da instrução
ADI <valor>.
24
17a – Primeira microinstrução da instrução ADI <valor>
17b – Primeira microinstrução da instrução ADI <valor>
17c – Segunda microinstrução da instrução ADI <valor>
17d – Terceira microinstrução da instrução ADI <valor>
17e – Quarta microinstrução da instrução ADI <valor>
25
6.11 Descrição dos sinais ativos durante a instrução LDA <endereço>
Na instrução LDA <endereço>, o conteúdo pertencente ao endereço especificado é
transferido para o acumulador. A seguir descrevemos as microinstruções executadas a cada
ciclo de clock da instrução LDA <endereço>.
Primeira microinstrução da instrução LDA <endereço>, sinais ativos:
- /CPLER – o conteúdo do contador de programa é transferido para o barramento
de dados
- /RECARGA – o dado disponível no barramento de dados é carregado no
registrador de endereços
Segunda microinstrução da instrução LDA <endereço>, sinais ativos:
- /RELER – o conteúdo armazenado no registrador de endereços é transferido
para o barramento de endereços
- MEMHAB - habilita a memória RAM para leitura, transferindo o conteúdo do
endereço disponibilizado para o barramento de dados
- /RECARGA – o dado disponível no barramento de dados é carregado no
registrador de endereços
Terceira microinstrução da instrução LDA <endereço>, sinais ativos:
- /RELER – o conteúdo armazenado no registrador de endereços é transferido
para o barramento de endereços
- MEMHAB - habilita a memória RAM para leitura, transferindo o conteúdo do
endereço disponibilizado para o barramento de dados
- /RACARGA – o dado disponível no barramento de dados é carregado no
acumulador
Quarta microinstrução da instrução LDA <endereço>, sinais ativos:
- CPHAB – o contador de programa é incrementado
Quinta microinstrução da instrução LDA <endereço>, sinais ativos:
- FIM – finalização da instrução, início de um novo ciclo de busca
Na Figura 18a, 18b, 18c, 18d é possível visualizar os sinais ativos da instrução
LDA <endereço>.
26
18a – Primeira microinstrução da instrução LDA <endereço>
18b – Segunda microinstrução da instrução LDA <endereço>
18c – Terceira microinstrução da instrução LDA <endereço>
18d – Quarta microinstrução da instrução LDA <endereço>
6.12 Descrição dos sinais ativos durante a instrução STA <endereço>
Na instrução STA <endereço>, o conteúdo do acumulador é transferido para o
endereço especificado. A seguir descrevemos as microinstruções executadas a cada ciclo
de clock da instrução STA <endereço>.
Primeira microinstrução da instrução STA <endereço>, sinais ativos:
- /CPLER – o conteúdo do contador de programa é transferido para o barramento
de dados
- /RECARGA – o dado disponível no barramento de dados é carregado no
registrador de endereços
27
Segunda microinstrução da instrução STA <endereço>, sinais ativos:
- /RELER – o conteúdo armazenado no registrador de endereços é transferido
para o barramento de endereços
- MEMHAB - habilita a memória RAM para leitura, transferindo o conteúdo do
endereço disponibilizado para o barramento de dados
- /RECARGA – o dado disponível no barramento de dados é carregado no
registrador de endereços
Terceira microinstrução da instrução STA <endereço>, sinais ativos:
- /RELER – o conteúdo armazenado no registrador de endereços é transferido
para o barramento de endereços
- /RALER – disponibiliza o conteúdo do acumulador para o barramento de dados
- MEMHAB - habilita a memória RAM
- MEML/E – habilita a memória TAM para escrita
Quarta microinstrução da instrução STA <endereço>, sinais ativos:
- CPHAB – o contador de programa é incrementado
Quinta microinstrução da instrução STA <endereço>, sinais ativos:
- FIM – finalização da instrução, início de um novo ciclo de busca
Na Figura 19a, 19b, 19c, 19d é possível visualizar os sinais ativos da instrução STA
<endereço>.
28
19a – Primeira microinstrução da instrução STA <endereço>
19b – Segunda microinstrução da instrução STA <endereço>
19c – Terceira microinstrução da instrução STA <endereço>
19d – Quarta microinstrução da instrução STA <endereço>
6.13 Descrição dos sinais ativos durante a instrução SUBI <valor>
Na instrução SUBI <valor>, temos o conteúdo pertencente ao acumulador
subtraído ao valor especificado. Na Tabela 7 temos os sinais ativos em cada microinstrução
da instrução SUBI <valor>.
1a
2a
3a
/CPLER
/RELER
S0...S3 = 6
/RECARGA MEMHAB MODOULA = 0
/RBCARGA /FLAG
/UM
4a
5a
6a
S0...S3 =6
CPHAB FIM
MODOULA = 0
/ULALER
/RACARGA
/UM
Tabela 7 – Sinais ativos das microinstruções da instrução SUBI <valor>
29
6.14 Descrição dos sinais ativos durante a instrução INC A
Na instrução INC A temos o conteúdo pertencente ao acumulador incrementado de
1. Na Tabela 8 temos os sinais ativos em cada microinstrução da instrução INC A.
1a
2a
3a
S0...S3 = 0 S0...S3 = 0 FIM
/UM
/UM
/FLAG
/ULALER
/RACARGA
Tabela 8 – Sinais ativos das microinstruções da instrução INC A
6.15 Descrição dos sinais ativos durante a instrução DCR A
Na instrução DCR A temos o conteúdo pertencente ao acumulador decrementado
de 1. Na Tabela 9 temos os sinais ativos em cada microinstrução da instrução INC A.
2a
3a
1a
S0...S3 = 15 S0...S3 = 15 FIM
/FLAG
/ULALER
/RACARGA
Tabela 9 – Sinais ativos das microinstruções da instrução DCR A
6.16 Descrição dos sinais ativos durante a instrução LDI <valor>
Na instrução LDI <valor> o valor especificado transferido para o acumulador. Na
Tabela 10 temos os sinais ativos em cada microinstrução da instrução LDI <valor>.
1a
2a
3a
4a
/CPLER
/RELER
CPHAB FIM
/RECARGA MEMHAB
/RACARGA
Tabela 10 – Sinais ativos das microinstruções da instrução LDI <valor>
6.17 Descrição dos sinais ativos durante a instrução ANI <dado>
Na instrução ANI <dado> realiza-se a operação lógica E com o conteúdo do
acumulador e o dado especificado. Na Tabela 11 temos os sinais ativos em cada
microinstrução da instrução ANI <dado>.
1a
2a
3a
4a
5a
6a
/CPLER
/RELER
S0...S3 = 11
S0...S3 = 11
CPHAB FIM
/RECARGA MEMHAB MODOULA = 1 MODOULA = 1
/RBCARGA /FLAG
/ULALER
/RACARGA
Tabela 11 - Sinais ativos das microinstruções da instrução ANI <dado>
30
6.18 Descrição dos sinais ativos durante a instrução ORI <dado>
Na instrução ORI <dado> realiza-se a operação lógica OU com o conteúdo do
acumulador e o dado especificado. Na Tabela 12 temos os sinais ativos em cada
microinstrução da instrução ORI <dado>.
1a
2a
3a
4a
5a
6a
/CPLER
/RELER
S0...S3 = 14
S0...S3 = 14
CPHAB FIM
/RECARGA MEMHAB MODOULA = 1 MODOULA = 1
/RBCARGA /FLAG
/ULALER
/RACARGA
Tabela 12 – Sinais ativos das microinstruções da instrução ORI <dado>
6.19 Descrição dos sinais ativos durante a instrução XRI <dado>
Na instrução XRI <dado> realiza-se a operação lógica XOR com o conteúdo do
acumulador e o dado especificado. Na Tabela 13 temos os sinais ativos em cada
microinstrução da instrução XRI <dado>.
1a
2a
3a
4a
5a
6a
/CPLER
/RELER
S0...S3 = 6
S0...S3 = 6
CPHAB FIM
/RECARGA MEMHAB MODOULA = 1 MODOULA = 1
/RBCARGA /FLAG
/ULALER
/RACARGA
Tabela 13 – Sinais ativos das microinstruções da instrução XRI <dado>
6.20 Descrição dos sinais ativos durante a instrução XRA
Na instrução XRA realiza-se a operação lógica XOR com o conteúdo do
acumulador e seu próprio conteúdo, ou seja o conteúdo do acumulador é zerado. Na Tabela
14 temos os sinais ativos em cada microinstrução da instrução XRI <dado>.
1a
2a
3a
4a
/RALER
S0...S3 = 6
S0...S3 = 6
FIM
/RBCARGA MODOULA = 1 MODOULA = 1
/FLAG
/ULALER
/RACARGA
Tabela 14 – Sinais ativos das microinstruções da instrução XRA
6.21 Descrição dos sinais ativos durante a instrução CMA
Na instrução CMA, o conteúdo do acumulador é complementado. Na Tabela 15
temos os sinais ativos em cada microinstrução da instrução CMA.
31
1a
3a
4a
S0...S3 = 0
S0...S3 = 0
FIM
MODOULA = 1 MODOULA = 1
/FLAG
/ULALER
/RACARGA
Tabela 15 – Sinais ativos das microinstruções da instrução CMA
6.22 Descrição dos sinais ativos durante a instrução JMP <endereço>
Na instrução JMP <endereço> temos um salto incondicional. Na Tabela 16 temos
os sinais ativos em cada microinstrução da instrução JMP <endereço>.
1a
2a
3a
/CPLER
/RELER
FIM
/RECARGA MEMHAB
/CPCARGA
Tabela 16 – Sinais ativos das microinstruções da instrução JMP <endereço>
6.23 Descrição dos sinais ativos durante a instrução JZ, JC, JS, JEQ <endereço>
Na instrução JZ <endereço> temos um salto condicional. Se o flag /ZERO = 0
teremos o salto para o endereço especificado, ou seja, o contador de programa passa a
executar a instrução que estará no endereço especificado, caso contrário, se /ZERO = 1 o
contador de programa será incrementado executando a próxima instrução. Na Tabela 17 e
18 temos os sinais ativos em cada microinstrução da instrução JZ <endereço>.
1a
2a
3a
/CPLER
/RELER
FIM
/RECARGA MEMHAB
/CPCARGA
Tabela 17 – Sinais ativos das microinstruções da instrução JZ <endereço>,
se o flag /ZERO = 0
1a
2a
CPHAB FIM
Tabela 18 – Sinais ativos das microinstruções da instrução JZ <endereço>,
se o flag /ZERO = 1
Na instrução JC <endereço> (flag /VAI-UM) teremos as mesmos sinais ativos da
Tabela 17 se o flag /VAI-UM = 0 e a próxima instrução a ser executada estará no endereço
especificado. Teremos os sinais ativos da Tabela 18 se o flag /VAI-UM = 1, onde a
próxima instrução a ser executada será o próximo endereço do contador de programa.
Na instrução JS <endereço> (flag de SINAL) teremos os sinais ativos da Tabela 17
se o flag SINAL = 1, e o salto para o endereço especificado ocorrerá, caso contrário, se
SINAL = 0 teremos os sinais ativos descrita na Tabela 18, observando que o salto não
ocorrerá.
Na instrução JEQ <endereço> (flag IGUAL) teremos os sinais ativos da Tabela 17
se o flag IGUAL =1, ocorrendo o salto para o endereço especificado, caso contrário, se o
32
flag IGUAL = 0 teremos os sinais ativos descrita na Tabela 18, observando que o salto não
ocorrerá. Para a instrução JEQ <endereço> deve-se primeiro realizar a instrução CMP
<dado>, ou seja deve haver uma comparação entre dois dados para que o flag IGUAL seja
ativado.
6.24 Descrição dos sinais ativos durante a instrução CALL <endereço>
Na instrução CALL <endereço> teremos uma chamada a uma subrotina. O
endereço apontado pelo contador de programa é armazenado na pilha e a próxima instrução
a ser executada estará no endereço especificado. Na Tabela 19 temos os sinais ativos em
cada microinstrução da instrução CALL <endereço>.
1a
2a
3a
4a
5a
6a
7a
/APHAB /APLER
/RELER
/CPLER
/RELER
/APHAB FIM
/RECARGA /CPLER
/RECARGA MEMHAB
MEMHAB
/CPCARGA
MEML/E
Tabela 19 – Sinais ativos das microinstruções da instrução CALL <endereço>
6.25 Descrição dos sinais ativos durante a instrução RET
Na instrução RET teremos o retorno ao programa principal. O endereço
armazenado na pilha quando executa-se a instrução CALL <endereço> retorna ao
contador de programa, assim teremos o retorno ao programa principal. Na Tabela 20 temos
os sinais ativos em cada microinstrução da instrução RET.
1a
2a
3a
4a
5a
/APHAB /APLER
/RELER
/CPHAB FIM
APD/I = 0 /RECARGA MEMHAB
/CPCARGA
Tabela 20 – Sinais ativos das microinstruções da instrução RET
6.26 Descrição dos sinais ativos durante a instrução CMP <dado>
Na instrução CMP <dado> teremos o conteúdo do acumulador sendo comparado
com o dado especificado. Na realidade teremos uma subtração sendo executada. O objetivo
desta instrução é setar o flag IGUAL se o resultado da operação é igual a zero. Na Tabela
21 temos os sinais ativos em cada microinstrução da instrução CMP <dados>.
1a
2a
3a
4a
5a
/CPLER
/RELER
S0...S3 = 6 /CPHAB FIM
/RECARGA MEMHAB /FLAG
/RBCARGA
Tabela 21 – Sinais ativos das microinstruções da instrução CMP <dados>
33
6.27 Descrição dos sinais ativos durante a instrução ADD <endereço>
Na instrução ADD <endereço> teremos o conteúdo do acumulador somada com o
conteúdo do endereço especificado, colocando-se o resultado no acumulador. Na Tabela 22
temos os sinais ativos em cada microinstrução da instrução ADD <endereço>.
1a
2a
3a
4a
5a
6a
7a
/CPLER
/RELER
/RELER
S0...S3 = 9
S0...S3 = 9
CPHAB FIM
/RECARGA MEMHAB MEMHAB MODOULA=0 MODOULA=0
/RECARGA /RBCARGA /FLAG
/ULALER
/RACARGA
Tabela 22 – Sinais ativos das microinstruções da instrução ADD <endereço>
6.28 Descrição dos sinais ativos durante a instrução SUB <endereço>
Na instrução SUB <endereço> teremos o conteúdo do acumulador subtraída do
conteúdo do endereço especificado, colocando-se o resultado no acumulador. Na Tabela 23
temos os sinais ativos em cada microinstrução da instrução SUB <endereço>
1a
2a
3a
4a
5a
6a
7a
/CPLER
/RELER
/RELER
S0...S3 = 6
S0...S3 = 6
CPHAB FIM
/RECARGA MEMHAB MEMHAB MODOULA=0 MODOULA=0
/RECARGA /RBCARGA /FLAG
/ULALER
/RACARGA
Tabela 23 – Sinais ativos das microinstruções da instrução ADD <endereço>
6.29 Descrição dos sinais ativos durante a instrução INA
Na instrução INA teremos a leitura do dado da entrada analógica e armazenado no
acumulador. Na Tabela 24 temos os sinais ativos em cada microinstrução da instrução
INA.
1a
2a
/BEALER
FIM
/RACARGA
Tabela 24 – Sinais ativos das microinstruções da instrução INA
6.30 Descrição dos sinais ativos durante a instrução IND
Na instrução IND teremos a leitura do dado da entrada digital e armazenado no
acumulador. Na Tabela 25 temos os sinais ativos em cada microinstrução da instrução
IND.
1a
2a
/BEDLER
FIM
/RACARGA
Tabela 25 – Sinais ativos das microinstruções da instrução IND
34
6.31 Descrição dos sinais ativos durante a instrução OUTA
Na instrução OUTA teremos o conteúdo do acumulador transferido para a saída
analógica. Na Tabela 26 temos os sinais ativos em cada microinstrução da instrução
OUTA.
1a
2a
/RALER
FIM
/RSACARGA
Tabela 26 – Sinais ativos das microinstruções da instrução OUTA
6.32 Descrição dos sinais ativos durante a instrução OUTD
Na instrução OUTD teremos o conteúdo do acumulador transferido para a saída
digital. Na Tabela 27 temos os sinais ativos em cada microinstrução da instrução OUTD.
1a
2a
/RALER
FIM
/RSDCARGA
Tabela 27 – Sinais ativos das microinstruções da instrução OUTD
6.33 Descrição dos sinais ativos durante a instrução HALT
Na instrução HALT teremos o clock interrompido. Na Tabela 28 temos os sinais
ativos em cada microinstrução da instrução halt.
1a
/PARAR
Tabela 28 – Sinais ativos das microinstruções da instrução HALT
6.34 Descrição dos sinais ativos durante a instrução PUSH
Na instrução PUSH teremos o conteúdo do acumulador transferido para o endereço
indicado pelo Apontador de Pilha. Na Tabela 29 temos os sinais ativos em cada
microinstrução da instrução push.
1a
/APHAB
2a
/APLER
/RECARGA
3a
/RELER
MEMHAB
MEML/E = 0
/RALER
4a
FIM
Tabela 29 – Sinais ativos das microinstruções da instrução PUSH
6.35 Descrição dos sinais ativos durante a instrução POP
Na instrução POP teremos o conteúdo do endereço apontado pelo Apontador de
Pilha transferido para o acumulador. Na Tabela 30 temos os sinais ativos em cada
microinstrução da instrução pop.
35
1a
/APLER
/RECARGA
2a
/RELER
MEMHAB
MEML/E = 1
/RACARGA
3a
/APHAB
APD/I = 1
4a
FIM
Tabela 30 – Sinais ativos das microinstruções da instrução POP
36
7 Referências Bibliográficas
STALLINGS, WILLIAM. Computer Organization and Architecture – Designing for
Performance. Fourth Edition. Prentice Hall, 1996.
HENNESSY, J. L. & PATTERSON, D. A. Computer Organization and Design – The
Hardware/Software Interface. Second Edition. Morgan Kaufmann Publishers, Inc,
1998.
PATTERSON, D. A. & HENNESSY, J. L. Computer Architecture a Quantitative
Approach. Second Edition. Morgan Kaufmann Publishers, Inc, 1990,1996.
TOKHEIM, L. R. Introdução aos Microprocessadores. MacGraw-Hill do Brasil, São
Paulo, 1985.
ZUFFO, João Antônio. Fundamentos da Arquitetura e Organização
Microprocessadores. Editora Edgard Blucher Ltda, São Paulo, 1978.
dos
ZUFFO, João Antônio. Microprocessadores: Dutos de Sistema, Técnicas de Interface e
Sistemas de Comunicação de Dados. Editora Edgard Blucher Ltda, São Paulo, 1981.
TAUB, Herbert. Circuitos Digitais e Microprocessadores. Editora McGraw-Hill, São
Paulo, 1984.
LANGDON Jr, G. G. e FREGNI, E. Projeto de Computadores Digitais. Edgard Blucher
Ltda, 1990.
MALVINO, A. Microcomputadores e Microprocessadores. McGraw-Hill, São Paulo,
1986.
TANEMBAUM, A. S. Organização Estruturada de Computadores. Prentice Hall do Brasil,
São Paulo, 1984.
HAYES, John P. Computer Architecture and Organization. McGraw-Hill, São Paulo,
1988.
37