capítulo
I
Princípios Básicos Sobre
Transmissão Digital
Distorções
Em um sistema de telecomunicações, existem diversos fatores, que podem levar à distorções
no sinal transmitido. Entre esses fatores, pode-se citar:
¨ Distorções causadas por características não lineares dos equipamentos empregados no processo de transmissão.
¨ Distorção de intermodulação em equipamentos de transmissão analógicos.
¨ Distorção de quantização em equipamentos de transmissão digital.
¨ Distorções lineares, causados por uma resposta de amplitude ou resposta de fase
não ideal dos diversos meios de transmissão empregados no sistema.
Distorções não lineares e lineares
As distorções não lineares se caracterizam pelo aparecimento, na saída do dispositivo, de
componentes de frequência diferentes daquelas existentes na entrada. Esses componentes
quando somados às origens, fornecem um sinal distorcido.
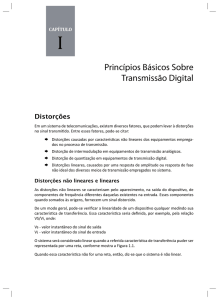
De um modo geral, pode-se verificar a linearidade de um dispositivo qualquer medindo sua
característica de transferência. Essa característica seria definida, por exemplo, pela relação
VS/Vi, onde:
Vs - valor instantâneo do sinal de saída
V¡ - valor instantâneo do sinal de entrada
O sistema será considerado linear quando a referida característica de transferência puder ser
representada por uma reta, conforme mostra a Figura 1.1.
Quando essa característica não for uma reta, então, diz-se que o sistema é não linear.
2
|
Rede de Computadores – Convergência das Redes
Figura 1.1 - Distorções lineares e não lineares.
Nesse caso, é possível aproximar-se, na maioria dos casos, a característica Vs/Vi por curva
polinomial de grau n.
A característica de não linearidade acarreta distorções não lineares.
Para efeito de estudo, suponha que:
V¡ = A.sen(xt), portanto um sinal senoidal de frequência angular x, e
Vs = A.sen(xt) + A.sen(2xt)
Observa-se que na saída surge uma frequência (2x), não sendo conservada apenas a frequência fundamental, acarretando que a forma de onda de saída surgirá distorcida, de uma
forma não linear.
Quadripolos
Seja o quadripolo Q da Figura1.2.
Figura 1.2 – Quadripolo.
Pe = potência elétrica do sinal de entrada.
Ps = potência elétrica do sinal de saída.
Considere a relação R entre as potências dos sinais de saída e de entrada:
R = Ps/Pe
Sobre a relação R, tem-se:
B= a) Se, Ps > Pe, então R > 1 e R é o ganho linear (G) do quadripolo. Nesse caso, o quadripolo
é dito ativo;
Princípios Básicos Sobre Transmissão Digital
|
3
B= b) Se, Ps < Pe, então R < 1 e R é a atenuação linear (A) do quadripolo. Neste caso, o quadripolo é dito passivo;
B= c) Se, Ps = Pe, então R = 1 e, nesse caso, o quadripolo é transparente à potência elétrica,
não sendo ativo (não amplifica) e nem passivo (não atenua).
Relação de potências
Para se exprimir melhor uma relação de potências elétricas, é conveniente adotar uma unidade logarítmica, devido a grande variação de valores.
Em 1923, a Companhia Americana de Telégrafos e Telefones (ATT) adotou uma unidade chamada “unidade de transmissão”, que posteriormente foi aprovada por um Comitê Internacional e
recebeu o nome “Bel”, em homenagem ao inventor do telefone Alexander Graham Bell.
Por definição, o Bel é o logaritmo decimal do número que exprime uma relação de potências
elétricas. Se R é uma relação de potências elétricas, matematicamente teríamos:
r = log R
Onde: r é uma relação de potências elétricas expressa em Bel.
Como esta unidade é muito grande, adotou-se, então, na prática, o submúltiplo decibel, representado por dB. Portanto, o dB é a unidade padrão de transmissão.
Matematicamente, a relação de potências elétricas r, expressa em dB será:
r = 10logR, ou seja, r = 10log(Ps/Pe)
Exemplo: Considere o quadripolo da figura acima. Sendo Ps = 4 mW e Pe = 2mW, determine
a relação de potências em dB e diga se o quadripolo é ativo ou passivo.
Solução:
Ps = 4 mW; Pe = 2 mW
R = 10 log(Ps/Pe) = 10 log(4/2) = 10log2 = 10.0,301 = 3,01 dB.
Como: r> 0, tem-se ganho e o quadripolo é ativo, com ganho de 3,01 dB.
Note, que quando a potência de saída é a metade da potência de entrada, existe uma atenuação de 3 dB.
Observe, que P = V2/R
Frequentemente nos deparamos com relações de frequências em vez de relações de potências.
Podemos dizer que:
dB = 10.[log(Vs2/R)/(Ve2/R)] = 10.log(Vs/Ve)2, ou seja,
dB = 20.log(Vs/Ve)
4
|
Rede de Computadores – Convergência das Redes
Unidades derivadas do dB
O decibel exprime a relação entre dois níveis de potência. Caso se estabeleça um deles como
padrão, podemos exprimir níveis absolutos, comparando estes com o padrão. O uso de níveis
absolutos facilita a maneira das medições.
Da mesma forma, podemos ter níveis relativos de potência de um sinal, em um ponto qualquer do sistema de transmissão, em relação ao nível de potência do sinal de um ponto arbitrário do sistema, chamado ponto de nível relativo zero.
De forma análoga, podemos ter para tensão, níveis absolutos e níveis relativos.
A seguir, serão vistas as principais unidades usadas para exprimir estes níveis absolutos ou
relativos de potência e tensão.
dBm
É a unidade que exprime o nível absoluto de potência em um certo ponto do circuito, relativo
a potência de 1mW na entrada do circuito (Pe = 1mW).
Temos:
N = 10log(Ps/Pe); N = nível absoluto de potência;
Como Pe = 1mW, então r = 10 log (Ps/1mW) = 10logPs, onde:
N está em dBm e
Ps está em mW.
Geralmente, os instrumentos que permitem leituras diretas em dBm, medem a tensão do
sinal sobre uma impedância de 600Ω.
Uma vez que P = Vee2/Z (P = potência, V = Voltagem e Z = Impedância), temos:
Vee2 = P * Z. Fazendo-se P = 1mW = 10ee-3W = Z = 600Ω
obtemos:
Vee2 = 10ee-3 * 600 = 0,6. Daí V = 0,6ee(1/2) = 0,775V.
Desta forma, um voltímetro com impedância de 600Ω, calibrado em dB e tendo o zero da
escala em dB, em 0,775V, dará leituras diretas em dBm, em pontos de medida de impedância
igual a 600Ω.
No caso da medida de tensão, onde a impedância no ponto de medida, é diferente de 600Ω,
torna-se necessário uma correção, a fim de não mascarar a leitura do medidor.
NOTA:
Não se pode efetuar as seguintes operações de dbm com dbm:
a) dBm + dBm
b) dBbm * dBm
c) dBm/dBm
Pode-se efetuar as seguintes operações entre dBm e dB:
a) dBm + ou – dB = dBm
b) dBm – dBm = dB
Princípios Básicos Sobre Transmissão Digital
|
5
dBr
É a unidade usada para referir o nível de potência de um sinal, em um ponto qualquer do
sistema de transmissão, em relação ao nível de potência do sinal em um ponto arbitrário do
sistema, denominado ponto de nível relativo zero.
O nível de potência em um ponto p do sistema, em relação ao nível de potência no ponto r
de referência, será dado por:
N = 10log(Pp/Pr) em dBr, sendo: Pp a potência do ponto considerado e Pr a potência no ponto de referência, ambas expressas na mesma unidade.
Casos Particulares:
a) Se: Pr = 1mW, então dBr = dBm
b) Se: N = 0dBr, então Pp = Pr
A unidade dBr não indica o nível absoluto de potência no ponto considerado, já que é função
do nível de potência absoluta no ponto de referência.
As operações com dBr são análogas para o dBm, ou seja:
a) dBr + ou -dB = dBr
b) dBr - dBr = dB
Exemplo:
Seja a linha de transmissão hipotética da Figura 1.3.
Figura 1.3 - Linha hipotética.
Injetando-se um nível de -3dBm no ponto A, qual são os níveis absolutos nos pontos B e C?
Solução: sejam, NA, NB e NC, respectivamente, os níveis nos pontos A, B e C.
Temos: NA = - 3dBm
a) Determinação de NB.
NB = NA – 4 = -3 – 4 = -7dBm. NB = -7dBm
b) Determinação de NC
NC = NB + 5 = -7 + 5 = - dBm. NC = -2dBm
6
|
Rede de Computadores – Convergência das Redes
dBm0
É a unidade que indica o nível absoluto de potência no ponto de nível relativo com zero dBr.
Este ponto é denominado RTLP (Reference Transmission Level Point), o qual indica o nível
absoluto de potência em dBm do circuito.
Podemos calcular o valor do nível absoluto de potência em dBm0 do circuito, se conhecermos
os valores dos níveis de potência do sinal em dBm e em dBr, em qualquer ponto do circuito.
dBm0 = dBm – dBr
Exemplo:
Seja a linha de transmissão hipotética da figura acima. Os níveis absoluto e relativo no ponto
A são 5dBm e –dBr, respectivamente.
Quais são os níveis absolutos e relativos nos pontos B e C? Qual é o nível dBm0 do circuito?
Ponto B:
5dBm – 4dB = 1dBm (nível absoluto de potência)
-2dBr – 4dB = -dBr (nível relativo de potência)
Ponto C:
1dBm + 5dB = 6dBm (nível absoluto de potência)
-6dBr + 5dB = -1dBr (nível relativo de potência)
Cálculo do dbm0:
No ponto A:
NA: 5 – (-2) = 7dBm0
NB: 1 - (-6) = 7dBm0
NC: 6 – (-1) = 7dBm0
Observe que o nível em dBm0 é sempre 7 em qualquer ponto do circuito acima referido.
Códigos de Linha Binários
Visão Geral
Código de linha é um código escolhido para uso dentro de um sistema de comunicação digital.
A codificação de linha trata-se da representação do sinal digital transportado no sistema, através
da amplitude e período dos sinais binários, cujas características físicas são selecionados para pos-
Princípios Básicos Sobre Transmissão Digital
|
7
sibilitar a otimização da performance de transmissão deste sinais digitais com relação ao do canal
de transmissão (meio físico), bem como da performance do equipamento receptor.
O padrão de voltagem, ou corrente da forma de onda usada para representas 1as e 0s de sinal digital sobre um enlace é, então, denominado de codificação de linha. Após a codificação
de linha o sinal pode ser inserido diretamente no meio de transmissão, na forma de varaição
de corrente. Os tipos mais comuns de codificação de linha são: unipolar, polar, bipolar e
Manchester.
A codificação de linha não deve conter componente DC (a média do nível do sinal deve ser
0), porque não é possível o transporte da componente DC sobre longas linhas metálicas. Por
outro lado a componente DC ocasiona uma modificação nas características elétricas do sinal
no lado receptor, surgindo uma maior probalidade de erro de decodificação.
A codificação de linha deve proporcionar o sincronismo do receptor em relação à fase do
sinal recebido, comparado ao sinal transmitido. Se o sincronismo não for ideal o sinal a ser
decodificado não possuirá as amplitudes originais do sinal transmitido levando-se a em consideração a ordem de chegada dos bits, o que ocasionará uma maior probabilidade de erro
de bits recebidos.
De preferência se deve escolher uma codificação de linha que possua uma estrutura, a qual
possibilite a detecção de erro de bits transmitidos. Note, que o sinal de codificado deve possuir
características físicas apropriadas para o meio físico que está sendo utilizado, por exemplo,
meios físicos metálicos, ou meios físicos de fibras ópticas. Estas características físicas são únicas
para cada tipo de meio físico, pois cada um destes meios físicos possui deiferentes comportamentos com relação à interferência, distorção, capacitância, e perda de amplitude.
Códigos Não Retorno a Zero (“Non-Return-to-Zero”) NRZ e Não
Retorno a Zero Invertido (“Non-Return-to-Zero, Inverted”) NRZI
O código NRZ unipolar possui a seguinte regra:
B= 1 = “+V”
B= 0 = “0”
A Figura 1.4 mostra um exemplo do código NRZ.
Figura 1.4 - Exemplo de codificação NRZ unipolar.
8
|
Rede de Computadores – Convergência das Redes
Os pulsos da codificação NRZ possuem mais energia do que os pulsos utilizados na codificação RZ (veremos a seguir), porém não possuem componente DC. Para sincronismo de pulsos
NRZ é necessário a transmissão separada do sinal de relógio ao lado do sinal de dados.
O código NRZ possui a metade da banda passante necessária para a codificação RZ, sendo
usado apenas em linhas de transmissão simples, onde o transmissor e o receptor estão relativamente próximos, e possuem baixa taxa de transmissão de bits.
O código NRZ é usado no protocolo serial RS-232, sinais internos de computadores, e Ethernet baseada em fibras ópticas (1000Base-X), entre outros sistemas.
Por outro lado a codificação NRZI, também unipolar, possui as seguintes regras:
B= 0 = Não possui transição no início do intervalo de tempo.
B= 1 = Possui transição no início do intervalo de tempo.
Figura 1.5 - Exemplo de codificação NRZI.
Esta codificação é utilizada é usada em “Compact Disk” (CD), “Universal Serial Bus” (USB) e
em Ethernet baseada em fibras ópticas trabalhando a 100Mbps (100Base-FX).
O código NRZ bipolar possui as seguintes regras:
1 = “+”
0 = “-”
Figura 1.6 - Exemplo de código NRZ bipolar
Princípios Básicos Sobre Transmissão Digital
|
9
Códigos Retorno a Zero (“Return-to-zero”) RZ e Retorno a Zero
Invertido (“Return-to-zero, inverted”) RZI
O sinal binário é codificado usando-se modulação do pulso em forma de amplitude retangular bipolar, do tipo retorno a zero (RZ), no qual a amplitude do sinal volta ao nível 0 durante
o intervalo de tempo do bit, conforme mostra a próxima figura.
Abaixo, seguem as regras deste código:
1 = Transição do “0” para “+” no início do intervalo de tempo. Transição do “+” para “0” na
metade do intervalo de tempo.
0 = Transição do “0” para “-” no início do intervalo de tempo. Transição do “-” para “0” na
metade do intervalo de tempo.
Figura 1.7 - Codificação RZ.
Este comportamento acima detalhado surge mesmo na ocorrência de consecutivos 1s e 0s
no sinal transmitido, o que ocasiona a não necessidade de transmissão separada do sinal de
“clock” (relógio) ao lado do sinal de dados transmitido. Desta forma esta codificação é do tipo
“self-clocking” (auto-relógio).
A variante Retorno a Zero Invertido (RZI) inverte os valores das codificações de 1s e 0s.
Códigos Manchester e Manchester Diferencial
A codificação Manchester possui a característica de possibilitar a transmissão arbitrária de
bits sem a ocorrência de longos períodos sem transição do estado da amplitude do bit, o que
proporciona não se perder o sincronismo do sinal de relógio, e a não ocorrência de erro de
bit em baixas taxas de transmissão em enlaces com precária equalização. Trata-se, portanto
de uma codificação auto-relógio.
A próxima figura mostra um exemplo de codificação Manchester. Note esta codificação é do
tipo bipolar, com a amplitude duas vezes maior do que na codificação RZ, ocorrendo transição do estado de amplitude no meio do período de tempo do pulso, conforme mostra a
figura abaixo.
Figura 1.8 - Codificação Manchester do fluxo de bits 11011000100.
10
|
Rede de Computadores – Convergência das Redes
A codificação Manchester não possui componente DC o que torna mais simples o processo
de regeneração do sinal, bem como economia de energia.
A codificação Manchester propoprciona uma maneira simples de codificação arbitrária de seqüências binárias não existindo longos períodos sem transição do sinal, possibilitando a não
existência de perda de sincronismo, ou erros de bits transmitidos devido ao deslocamento
da componente DC.
Componente de Nível DC
Quando a probabilidade de ocorrência de símbolos 1s e 0s é igual não existe componente
DC. Entretanto, tratando-se de longas seqüências de 1s, ou 0s, surge uma componente DC,
conforme ilustra a próxima figura.
Figura 1.9 - Componente de nível DC.
O fato acima comentado ocasiona grandes problemas em redes que utilizam acoplamento
AC através de capacitores, transformadores e amplificadores AC, pois a resposta de freqüência é prejudicada na parte da componente DC. O resultado disto é que o sinal se desloca
para o nível 0, em longos períodos de 0s, o que reduz a margem de erro, e isto ocasiona o
aumento da taxa de erro de bit, que pode ser evitado, através do uso do código Manchester,
o qual é utilizado em Redes Locais de Computadores (LANs). A figura a seguir mostra a forma
dos pulsos Manchester (parte superior), e um exemplo de seqüência de bits com codificação
Manchester.
Figura 1.10 - Nível DC = 0 para pulsos Manchester.
Princípios Básicos Sobre Transmissão Digital
|
11
A codificação Manchester é um caso especial da codificação “Binary Phase Shift Keying”
(BPSK), na qual os dados transmitidos controlam a fase de uma onda portadora quadrada,
com a freqüência na taxa de transmissão dos bits, fato este, que proporciona uma fácil geração do sinal digital codificado.
Para controlar a quantidade de banda passante necessária pode ser utilizado um filtro a fim
de reduzir a banda passante para menos de 1HZ por bit/s, e mesmo assim não perder nenhuma informação, durante a transmissão dos bits. Entretanto, por razões práticas (e para
maior controle da banda passante, especialmente em sistema de rádio), a maioria dos moduladores BPSK escolhem a freqüência da portadora muito mais alta que a taxa de transmissão
de bits, resultando em maior eficiência da filtragem da banda passante, sendo entretando,
preservada a propriedade de 1Hz/bps.
A codificação Manchester diferencial é um método de codificação no qual:
¨ Sinais de dados e de relógio são combinados para formarem um único fluxo de
dados com auto-relógio.
¨ Um dos dois bits (0 ou 1) é representado através da não transição no início do período de tempo do pulso e da transição no meio do período de tempo do pulso.
¨ O outro bit é representado através da transição no início do período de tempo do
pulso, e de uma transição no meio do perríodo de tempo do pulso.
NOTA:
Na codificação Manchester Diferencial se 1 é representado através de uma transição,
o 0 é representado através de duas transições e vice-versa.
Códigos “Alternate Mark Inversion” AMI e “High Density
Bopolar – 3” HDB3
O Código AMI (“Alternate Mark Inversion”), é um código pseudo-ternário, cujo valor binário
“0” é alternadamente representado por impulsos negativos e positivos e o valor binário “1”
é representando pela ausência de tensão.
O código AMI, (Marcas Alternadas Invertidas), apresenta as seguintes etapas:
1) Transformação dos pulsos NRZ para RZ (Return to Zero): Os pulsos positivos correspon-
dentes ao valor binário “1”, passam a ocupar a metade do tempo do bit.
2) Inversão de polaridade dos pulsos alternados: Os pulsos apresentam dois níveis de ten-
são, positivo e negativo. Os 1s transmitidos de forma alternada, onde nunca poderão existir
dois pulsos consecutivos de mesma polaridade, conforme ilustra Figura 1.32. Note, que o
sinal bipolar possui na verdade três estados possíveis (pseudoternário):
¨ positivo
¨ negativo
¨ zero
12
|
Rede de Computadores – Convergência das Redes
Figura 1.11 - Formação da codificação AMI.
Uma das vantagens do sinal AMI é a possibilidade de eliminação da componente DC, porém
este código possui também algumas desvantagens, como, por exemplo, o sincronismo. Para
evitar isso, outras formas de sinal ou código foram desenvolvidas. Um desses códigos, que
tembém é recomendando pelo CCITT (Recomendação G703), é denominado HDB-3, o qual é
utilizado em sistemas PCM.
O código HDB-3 é na verdade uma complementação do código AMI, e tem por finalidade
evitar seqüência longa seqüência de zeros, sempre introduzindo-se um pulso “V” (violação
de bipolaridade), ou um V e um bit falso (B), em determinada condição.
As regras de codificação de HDB-3 são as seguintes:
Na existência de 4 0s consecutivos na linha, duas, são as possibilidades para a codificação:
¨ Se a violação anterior “V” foi de sinal oposto ao “1”, imediatamente anterior aos
quatro “zeros”, adiciona-se o pulso de violação após o terceiro zero, com polaridade igual ao pulso “1” anterior.
¨ Se a violação anterior “V” foi do mesmo sinal que o “1”, imediatamente anterior
aos quatro “zeros”, adiciona-se no primeiro intervalo de tempo após o “1” de referência acima detalhado, um bit “1” de polaridade oposta a este bit “1”, denominado de pulso falso. Os dois intervalos seguintes serão zero, seguido de um pulso “V”
de mesma polaridade que o pulso falso.
A adição de pulsos de violação e pulsos falsos tem como objetivo, quebrar a alternância de
polaridade no conjunto de quatro zeros e, ao mesmo tempo, manter a componente DC praticamente igual a zero ao longo do trem de pulsos.
Princípios Básicos Sobre Transmissão Digital
|
13
Figura 1.12 - Formação do código HDB-3.
Resumo:
1) O 2º e 3º espaços da seqüência serão sempre representados por zeros.
2) O 4º espaço da seqüência será sempre substituído por uma violação (um pulso de mesma polaridade que o último pulso do sinal).
3) O 1º espaço da seqüência será sempre substituído por uma marca (pulso de polaridade
oposta ao último pulso presente no sinal), somente, quando o pulso que o precede imediatamente for uma marca de polaridade igual a da última violação ocorrida, caso contrário será
representada por um zero.
A próxima figura mostra a comparação entre uma determinada seqüência de bits TTL, e na
codificação HDB-3. Observe, que apesar desta referida figura mostrar os pulsos HDB-3 no
formato NRZ (apenas para facilitar a compreensão), na realidade, os pulsos HDB-3 são do
tipo RZ.
Figura 1.13 - Comparação entre TTL e HBD-3.
14
|
Rede de Computadores – Convergência das Redes
Multiplexadores
Multiplexação é a técnica de transmissão de múltiplos canais de dados em um único meio
de transmissão.
Existem as seguintes técnicas de multiplexação:
¨ Multiplexação por Divisão de Freqüência (FDM): Um canal possui várias portadoras
com frequência diferentes.
¨ Multiplexação por Divisão de Tempo (TDM): Um canal de alta velocidade é subdividido em intervalos de tempo (“time slots”), correspondente a um bit ou a um byte,
o que é conhecido como intercalação de bit ou de byte.
¨ Determinística: Reserva um intervalo de tempo fixo para um canal secundário
(contribuinte).
¨ Estatística: Reserva um intervalo de tempo variável para um canal secundário (contribuinte).
Multiplexadores Determinísticos
A multiplexação por divisão de tempo determinística é um processo no qual é reservado um
intervalo de tempo (sub-canal) para cada canal de transmissão compartilhado (canal principal). Este tipo de multiplexação também é denominada de Multiplexação por Divisão de
Tempo Síncrona.
Observe na próxima figura, que um mux TDM (“Time Division Multiplex”) síncrono compartilha um canal síncrono, para os dados provenientes dos canais secundários do mux, intercalando bits ou caracteres em um quadro (“frame”), transmitindo-o com uma taxa de transmissão, que suporte o acima referido. Se compararmos a um mux FDM, o TDM é geralmente
mais eficiente, desde que se utilize toda a banda disponível do canal principal. Um TDM, por
exemplo, pode operar com taxas de transmissão de 4800, 7200 e 9600 bps, onde um FDM
está limitado praticamente a velocidades até 2000 bps.
A multiplexação determinística baseia-se no entrelaçamento de amostras de vários canais,
num mesmo quadro. Dependendo de como estas amostras sejam multiplexadas, podemos
ter dois tipos de entrelaçamento: o entrelaçamento de bits, e o entrelaçamento de caracteres ou bytes.
Figura 1.14 - Multiplexação TDM.
No entrelaçamento de bits é feita uma gravação em paralelo nos canais secundários e uma
leitura serial no canal principal, onde o relógio (“clock”) de leitura é n vezes o clock de grava-
Princípios Básicos Sobre Transmissão Digital
|
15
ção. Note, que os bits de cada canal secundário são introduzidos canal principal, a fim de que
as informações dos canais secundários fiquem entrelaçadas bit-a-bit no canal principal.
Frequentemente considera-se fundamental preservar a composição dos caracteres (geralmente 1 byte) em todo o processo de transmissão. Neste caso, em lugar do método de entrelaçamento de bits, é utilizado o método de entrelaçamento de caracteres, também denominado de entrelaçamento de bytes. Neste caso, o sinal de entrada de cada canal é inicialmente
colocado em um registrador de deslocamento de 8 bits. Controlado por um relógio R1, armazenando um byte completo.
Quando o byte for armazenado, um conjunto de portas de transferência paralela, comandada por um relógio R2, carrega o byte no registrador de carga paralela.
A frequência do relógio R1 é 8 vezes maior que a freqüência do relógio R2, uma vez que são
necessários 8 transições do relógio R1 para o armazenamento de um byte completo.
Após a transferência paralela o sinal é transmitido com um “clock” N vezes mais rápido do
que R1, onde N é o número de canais multiplexados, a fim de que no tempo em que um canal
secundário transmite um byte, o canal principal possa transmitir N caracteres. Por exemplo, se
tivermos 4 canais secundários a 1200 BPS, teremos: R1= 1200Hz, R2= 150Hz e R3= 4800Hz.
Deste modo, o sinal digital síncrono transmitido no canal multiplexado será formado sucessivamente por um byte do canal A, depois um byte do canal B e assim por diante até o canal N.
Este método, apesar de ser mais complexo que o anterior, consegue preservar a composição
dos bytes. Deve-se observar também, a correta seqüência dos relógios R1, R2 e R3, que devem ter a mesma origem.
A técnica de intercalação de caracteres é bem mais utilizada do que a intercalação de bits,
principalmente pela sua eficiência quando multiplexando canais assíncronos.
NOTA:
Os terminais assíncronos utilizam o método de transmissão assíncrona, o qual trata-se
um método de transmissão onde cada byte é transmitido separadamente, sendo que
entre outras características, são introduzidis os bits de “start” (início), antes do byte de
informação e “stop” (fim), após o último bit do byte de informação, para possibilitar
o correto recebimento dos bytes pelo receptor (sincronismo entre o transmissor, e o
receptor).
A multiplexação permite, que antes de ser transmitido o pacote acima detalhado, seja subtraído o seu “start”, e seu “stop” bits. Estes bits retirados durante a multiplexação são recolocados ao serem demultiplexados no extremo remoto, desta forma são transmitidos apenas
oito bits no canal principal, dos dez bits recebidos no canal secundário, transmite-se apenas
8 bits no canal principal dos 10 bits recebidos do canal secundário, melhorando-se assim a
performance do sistema.
Entretanto, como a memorização de caracter resulta em maior atraso do que na intercalação
de bit, a técnica de intercalação de caracteres é usualmente preferida, para a multiplexação
das informações provenientes de terminais síncronos.
16
|
Rede de Computadores – Convergência das Redes
NOTA:
O PCM, o qual será estudado a seguir, utiliza o método de transmissão síncrona, no
qual é utilizado um byte para sincronismo, entre o transmissor e o receptor, a fim de
possibilitar o correto recebimento do quadro transmitido.
Note que se um sub-canal de multiplexador TDM síncrono não estiver transmitindo dados, o
intervalo de tempo corresponde a este sub-canal será perdido, pois ele fica reservado a este
sub-canal, independente do tráfego no mesmo.
A técnica TDM determinística é também chamada de TDM síncrona, pois o par de multiplexador/demultiplexador trabalha sincronizado em relação aos “time slots”.
Conforme já foi detalhado, é necessário, o sincronismo entre os mux’s TDM, para possibilitar
que receptor consiga identificar o início de cada novo quadro de dados multiplexados.
Figura 1.15 - Quadro TDM síncrono
A demultiplexação é obtida através da relação entre o endereço do buffer, e a posição relativa
do intervalo de tempo no quadro de dados multiplexados.
As vantagens da utilização de multiplexadores determinísticos são:
¨ Capacidade de multiplexar N canais em um canal de alta velocidade síncrono
onde:
¼ A velocidade do canal principal deve ser maior ou no mínimo igual ao somatório de velocidades dos canais secundários.
¼ A limitação está no canal de comunicação.
¨ Admite multiplexar terminais síncronos e assíncronos.
¨ Transparência aos dados transmitidos.
A principal desvantagem na utilização dos multiplexadores determinísticos está na ineficiente utilização do canal principal, já que o mux determinístico sempre atribui intervalos de
tempo aos terminais conectados nas portas secundárias, ainda que estas nada tenham a
transmitir no momento. Isto ocorre, porque não há um buffer e um protocolo elaborado no
canal principal para encaminhamento das mensagens.
Os modems analógicos de alta velocidade V.29 do CCITT podem ser implementados com um
multiplexador TDM determinístico com até quatro canais secundários.
A transmissão síncrona obedece a níveis de hierarquia, ou seja, a Hierarquia Digital Síncrona
(SDH). No Brasil foi adotada a SDH padronizada na Europa, conforme mostra a tabela a seguir.
Princípios Básicos Sobre Transmissão Digital
|
17
Tabela 1.1 – Hierarquia Digital Síncrona (SDH)
Nível
Taxa (bps)
Circuitos de voz equivalentes
Sistema
DS-0
64.000
1
1
2.048.000
30
E-1
2
8.448.000
120
E-2 (4xE-1)
3
34.368.000
480
E-3 (16xE-1)
4
139.264.000
1.290
E-4 (64xE-1)
5
565.148.000
7.680
E-5 (256xE-1)
Multiplexadores Estatísticos
A multiplexação por divisão de tempo estatística difere do TDM determinístico porque não
dedica um espaço de tempo fixo para cada canal multiplexado, e sim, só para os canais ativos
no momento. Desta forma, na multiplexação estatística, em condições de sobrecarga, ou
seja, quando a capacidade de transmissão no meio de transmissão é menor do que o tráfego
entregue ao sistema, o mux é incapaz de acomodar as informações de todos os terminais
no canal multiplexado (canal principal ou canal de alta velocidade) e torna-se importante a
existência de esquemas de fila (“queue”) e estatísticas.
A idéia fundamental do multiplexador estatístico é empregar a propriedade de sistemas TDM.
A diferença é que o mux estatístico só atribui intervalos de tempo de tempo aos canais ativos
no momento da montagem do quadro. Desta forma, a taxa de transmissão no canal principal
não é necessariamente, o somatório das taxas de transmissão dos canais secundários.
A viabilidade da multiplexação estatística é garantida pelo fato de que um terminal ocupa
menos de 10% de seu tempo transferindo dados. A figura a seguir mostra um exemplo de
transmissão empregando-se um multiplexador estatístico, ilustrando a alocação dinâmica
dos intervalos de tempo em um quadro.
Figura 1.16 - Técnica de Multiplexação Estatística.
Observe que no momento da montagem do quadro TDM, os canais A e C estão transmitindo
dados, enquanto os canais B e D não estão transmitindo dados.
Se o multiplex fosse do tipo determinístico, o intervalo de tempo destes canais ficaria reservado no canal principal, mesmo sem tráfego de dados. Por outro lado, o quadro do tipo
18
|
Rede de Computadores – Convergência das Redes
estatístico contem apenas os intervalos de tempo dos canais ativos, e não reservados intervalos de tempo para os canais inativos. Conseqüentemente, o quadro estatístico possibilita a
ocupação racional da banda disponível.
Deve-se notar também que, na muliplexação TDM síncrona o par de multiplexador/demultiplexador trabalha em sincronismo, pois os intervalos de tempo distribuídos a cada canal
são de tamanho fixo, e presentes em todos os quadros TDM síncronos. Já na multiplexação
estatística, o quadro pode ser constituído de dados de um, ou de vários canais secundários,
e precisa conter informações adicionais, para identificar os canais ativos. Cada intervalo de
tempo é acompanhada de informações adicionais, que funcionam como endereço de intervalo de tempo. Entretanto, existem outras alternativas para que o demultiplexador identifique a origem de um intervalo de tempo contido em um quadro.
Atente para o fato de que um elevado número de informações de controle e endereço dentro
de um quadro de dados aumenta o tráfego não destinado às informações originadas pelos
próprios terminais (“overhead”).
A técnica estatística apresenta um maior custo envolvendo o hardware e o software para o
controle das informações no canal principal, além da necessidade de um “buffer” de dados
para os dados provenientes do canal principal e dos canais secundários.
Neste tipo de multiplexação existe a possibilidade de surgirem consideráveis atrasos devido
a fila, em momentos de sobrecarga. Isto tudo pode ser compensado com as vantagens (técnicas e econômicas) que esta técnica traz.
A próxima figura mostra, através de um diagrama em blocos, o funcionamento de um mux
estatístico.
Figura 1.17 - Diagrama em Blocos do Mux Estatístico.
Na figura, observa-se que o fluxo de dados de/para os canais principais é controlado por um
processador de canais secundários, o qual é o responsável pela memorização, e leitura do
“buffer” de dados.
Os dados memorizados, pelo processador secundário, no “buffer” são lidos pelo processador principal, que procede a montagem dos quadros, e os transmite através do(s) canal(is)
Princípios Básicos Sobre Transmissão Digital
|
19
principal(is). Há um protocolo de comunicação (HDLC) entre os mux, que garante a integridade das informações. Os quadros ficam memorizados no “buffer”, até que os mesmos sejam
confirmados pelo mux remoto.
NOTA:
Estudaremos com detalhes o assunto “Protocolos de comunicação” no capítulo sobre
“Protocolos”.
No sentido contrário, os dados que chegam no mux pelo(s) canal(is) principal(is) passam por
uma rotina do processador para a checagem de erros de comunicação. Após etapa de detecção de erros eles são memorizados nos “buffers” correspondentes a cada canal secundário
do mux. A partir daí o processador secundário encarrega-se de ler os dados da memória, e
entregá-los aos respectivos canais secundários.
O protocolo de comunicação entre o par de multiplexador/demultiplexador é um protocolo
que segue o padrão CCITT (hoje ITU-T) X.25 nível 2, ou o padrão ISO – HDLC (“High-Level Data
Link Control”).
O quadro com o padrão HDLC é mostrado abaixo.
Figura 1.18 - Quadro HDLC.
O quadro HDLC é constituído por 5 campos:
a) Flag: O flag é o delimitador do frame. Possui uma seqüência fixa 01111110 e é colocado
no início e no fim de um quadro. Esta seqüência é protegida ao longo do quadro pela inserção
do bit “stuffing”, que é um bit zero, o qual é inserido na transmissão, sempre após o quinto
bit um, e retirado na recepção.
b) Campo de Endereço: Como no caso do mux estatístico sempre temos uma ligação pontoa-ponto, este campo é utilizado como controle para o mux.
c) Campo de Controle: Este campo é utilizado para:
¨ Indicar o tipo de frame
¨ Indicar o nº do frame de informação transmitido
¨ Indicar a confirmação de frames de informação bem recebidos
¨ Indicar a rejeição de frames
¨ Indicar qual o comando ou resposta em um frame de gerência.
d) Campo de Informação: Utilizado neste caso, para inserção das informações dos canais
secundários contidas no “buffer” e informações de controle de nível 3, (indicação de canais
ativos etc.).
20
|
Rede de Computadores – Convergência das Redes
e) Campo de Verificação de Erros: Este campo é utilizado para proteger o frame de possí-
veis erros inseridos pelo canal de comunicação. É utilizado um polinômio gerador conforme a
recomendação V.41 do CCITT para a geração do FCS (“Frame Checking Sequence”) utilizando
a técnica CRC (“Cyclic Redundancy Checking”).
O protocolo de nível 3 empregado por um multiplexador estatístico é próprio de cada fabricante e deve identificar os intervalos de tempo dos canais, bem como a quantidade de
informações transmitidas pelos canais ativos.
A distribuição dos intervalos de tempo aos canais ativos, quando automática, é proporcional
ao conteúdo do “buffer”, isto é, aquele terminal que transmitir mais durante um determinado espaço de tempo, ocupará maior tempo no frame. Esta é justamente a filosofia do mux
estatístico.
Portanto, os pacotes de dados em um quadro só existem para os canais secundários que
apresentam tráfego no instante em que vai ser feita a montagem do mesmo.
A identificação do pacote de dados pode ser feita de diversas formas: adicionando um endereço para cada pacote, juntamente com o número de bytes deste pacote, identificando a falta de um canal secundário no quadro, utilizando um campo de controle para identificar quais
os são os canais ativos e inativos entre outras. A melhor solução será aquela que apresentar
o maior controle com o menor “overhead”.
Modulação por Código de Pulso – MCP (PCM)
Amostragem, quantização, codificação, multiplexação,
demultiplexação, decodificação e recuperação do sinal
analógico
O sinal analógico que trafega em um enlace, pode ser transformado em um sinal de digital
usando-se a Modulação por Código de Pulso – MCP (PCM – sigla em inglês), através de uma
amostragem do sinal analógico, o qual recebe uma Modulação por Amplitude de Pulso (sigla
inglesa – PAM). Posteriormente, estas amostragens são transformadas em um trem de bits,
através de um processo denominado quantificação. Desta forma, qualquer sinal analógico
(voz, áudio, vídeo etc.) pode ser transformado em um sinal digital. O sinal anteriormente digitalizado pelo processo MCP pode ser transformado novamente em sinal analógico, através
da decodificação do trem de pulsos MCP em sinais PAM, o qual após uma filtragem, volta a
ser analógico.
O sinal analógico é amostrado segundo o “teorema da amostragem”, o qual exige que a
freqüência de amostragem deva ser, no mínimo, duas vezes maior que a maior freqüência
contida no sinal analógico a ser amostrado.
De acordo com o teorema da amostragem, o sinal telefônico analógico, que tem sua maior
freqüência igual a 3400Hz deve ter uma amostragem de no mínimo 6800Hz (2*3400Hz), a
fim de que não ocorra perda de informação referente ao sinal original, quando da sua reconversão no destino, através do equipamento receptor.
Princípios Básicos Sobre Transmissão Digital
|
21
Tendo em vista uma maior adequação, sob o ponto de vista tecnológico, adotou-se a freqüência de amostragem em 8000Hz (a nível internacional).
Levando-se esta freqüência de amostragem em consideração, temos que o intervalo de tempo entre duas amostras consecutivas é de 1/8000=125µs.
A próxima figura ilustra o processo de amostragem do sinal analógico na entrada do equipamento MCP-30.
Figura 1.19 - Amostragem do sinal analógico.
Um sinal PAM, gerado a partir de um sinal telefônico analógico, não é ainda adequado para
transmissão à longa distância, pois está sujeito à atenuações e distorções. Caso ocorram erros, estes resultam em uma mudança na forma do pulso recebido com prejuízo da qualidade
de transmissão. Para minimizar estes efeitos é necessário que o sinal PAM seja convertido em
sinal digital (seqüência de 0s e 1s).
A quantização é o processo através do qual estes sinais PAM são codificados em sinais digitais. O processo de quantização consiste em introduzir no terminal de origem da transmissão,
um determinado número de níveis discretos em amplitude e fazer a comparação entre o sinal
PAM e o nível discreto mais próximo. Na outra extremidade da linha de transmissão, deve-se
executar a operação inversa, ou seja, fazer a recuperação destes pulsos para um nível discreto
semelhante ao sinal PAM original. Para se determinar os níveis discretos de quantização, uma
faixa completa de valores de amplitude possíveis é dividida em intervalos de quantização.
A figura a seguir mostra o processo de quantização, a qual segue a lei A (padrão europeu).
22
|
Rede de Computadores – Convergência das Redes
Figura 1.20 - Lei de compressão A=87,6 (parte positiva).
Os níveis de quantização variam de -128 a +128 perfazendo 256 níveis de quantização. Observe na figura acima, que um sinal PAM a qual foi quantizada com o nível 107 obterá a
codificação 1101011 em numeração binária.
No lado receptor, todas as amostras, que na origem estão enquadradas dentro de um mesmo
intervalo de quantização, são recuperadas pelo valor médio do intervalo de quantização que
lhes deu origem. Isto causa pequenas discrepâncias que ocorrem entre as amostras do sinal
telefônico original no lado da transmissão, e os valores recuperados. A discrepância para
cada amostra pode ser de até metade de um intervalo de quantização. Em virtude disto, a
distorção de quantização poderá elevar-se no lado da recepção e manifestar-se como um
ruído sobreposto ao sinal útil. A distorção de quantização diminui quando o número de intervalos de quantização é aumentado.
Se os intervalos de quantização forem suficientemente pequenos, a distorção será mínima e
o ruído imperceptível.
Os sistemas de transmissão MCP (PCM) utilizam um código binário composto por 8 dígitos e
por 256 intervalos de quantização não uniformes. Cada amostra com seu valor em amplitude
é codificada em binário (“0” ou “1”) com 8 dígitos, antes da transmissão. A codificação propriamente dita, se dá na quantização, que conforme mostra a figura acima, é elaborada com
sete dígitos. O primeiro bit da palavra de oito dígitos indica a polaridade da amostra PAM
(positiva ou negativa).
Se a codificação PCM fosse linear teríamos, que as amplitudes dos sinais de entrada no codificador
teriam as mesmas amplitudes dos sinais de saída (Ve = Vs), conforme indica a próxima figura.
Princípios Básicos Sobre Transmissão Digital
|
23
Figura 1.21 – Codificação PCM linear.
Na realidade a codificação PCM é elaborada de acordo com a lei μ (E.U.A. e Japão), ou com a
lei A (Europa e Brasil), de acordo com as expressões matemáticas abaixo apresentadas:
Lei μ
Vs = sign(Ve )
ln (1 + 255Ve )
ln (256)
Lei A (A = 87,6)
Vs =
A
Ve
l + ln (A)
Vs =
, |Ve| ≤ 1/A.
sign(Ve )
(1 + ln(AVe ))
1 + ln( A)
, 1/A ≤ |Ve| ≤ 1.
O sinal digital possui um elevado grau de imunidade contra ruídos, podendo-se dizer, que os
sistemas MCP podem ser invulneráveis a ruído por regeneração e retransmissão ao longo do
caminho físico do sinal.
O conceito de multiplexação é proveniente do fato de que, palavras MCP (geralmente de 8
bits) de um determinado número de canais telefônicos poderem ser transmitidas consecutivamente e em repetidos ciclos, ou seja, no intervalo de tempo entre duas palavras MCP
de um mesmo canal telefônico são introduzidas palavras MCP de outros vinte e nove canais
telefônicos (MCP-30) arranjadas de forma consecutiva dentro deste intervalo de tempo, e
transmitidas desta mesma forma em repetidos ciclos, constituindo-se assim em sinal MCP
multiplexado por divisão de tempo.
No lado receptor, o sinal binário é demultiplexado, ou seja, as palavras binárias referentes aos
diversos canais são separadas do trem de pulsos de 2Mbit/s, e cada palavra binária, de cada
intervalo de tempo, é decodificada na mesma seqüência em que foram amostradas recebendo
24
|
Rede de Computadores – Convergência das Redes
um nível, reconstituindo-se assim, o sinal PAM original. Finalmente, as amostras PAM passam
por um filtro “passa-baixa”, reproduzindo-se desta forma, o sinal analógico original.
Estrutura do sistema MCP-30
Na MCP, os bits são agrupados em quadros contendo cada um destes 256 bits em trinta e
dois canais de oito bits.
A figura abaixo mostra a constituição de quadros do sistema. O intervalo de tempo zero
(canal 0) leva as informações de alinhamento de quadro (X0011011, onde X é reservado
para uso internacional e no momento o ITU recomenda colocá-lo em 1), e alternadamente,
o sinal de alarme (X1YZZZZ, onde Y indica alarme para a outra extremidade do enlace MCP,
através da mudança de 0 para 1 e Z é reservado para uso nacional, não devendo ser usado
internacionalmente).
Os canais 1 a 15 e 17 a 31 são canais de informação, onde estão todas as aplicações dos
usuários. O canal 16 é usado para levar a sinalização de dois canais. São necessários, portanto, quinze quadros para levar a sinalização dos trinta canais. Denomina-se multiquadro o
conjunto destes quinze quadros mais um quadro denominado quadro zero, o qual leva, no
canal 16, a palavra 0000XYXX. 0000, que é a palavra de sincronismo para o alinhamento do
superquadro X=1, quando não utilizado, e Y é o bit de indicação de alarme de sinalização para
a outra extremidade do enlace MCP, através da mudança do estado 0 para o estado 1. Cabe
aqui, a observação que entre as centrais RDSIBEs é usada a sinalização por canal comum e,
nesse caso, o canal 16 pode ser usado como um canal de voz.
Figura 1.22 - Ocupação dos intervalos de tempo (canais).
Todos os canais têm taxa de transmissão de 64Kbps o que importa em uma taxa total de
2.048Kbits. Os quadros são agrupados em superquadros constituídos de 16 quadros, com um
período de 2 milisegundos.
Um multiquadro é constituído por dezesseis intervalos de tempo de quadros MCP-30, numerados de 0 a 15.
Podemos definir vários intervalos de tempo, conforme abaixo discriminado:
Princípios Básicos Sobre Transmissão Digital
|
25
ITB: intervalo de tempo de bit = 0,488 μs
ITC: intervalo de tempo de canal = 3,9 μs
ITQ: intervalo de tempo de quadro = 125μs
ITM: intervalo de tempo do multiquadro = 2ms
Alinhamento e sincronismo de quadro
O ITC 0 de cada quadro destina-se às informações de alinhamento de quadro e transmissão
de alarmes. Os ITCs 1 a 15 e 17 a 31 de cada quadro levam os sinais de voz dos trinta canais
e o ITC 16 pode ser usado para levar as informações de sinalização de linha e alinhamento
do multiquadro (quadro 0: alinhamento do multiquadro; quadros 1 a 15: transmissão da
sinalização).
O alinhamento do sistema é essencial, pois é necessário, por exemplo, que o canal 1 transmitido, seja corretamente identificado no lado receptor como canal 1. Idêntico procedimento
deve ser realizado para os demais canais. Para garantir este alinhamento utiliza-se uma palavra padrão para o alinhamento de quadro, gerado no lado do transmissor e usado como referência para todos os bits subseqüentes, até a próxima palavra de alinhamento de quadro.
Perda de sincronismo de quadro
Conforme a definição dada pelo CCITT (ITU) - “Considera-se o alinhamento de quadro perdido, quando três palavras de alinhamento de quadro consecutivas são incorretamente recebidas”. A perda de alinhamento pode ocorrer em várias circunstâncias, tais como: falha no
sistema, degradação qualitativa do meio de transmissão etc.
Nos quadros pares dos ITCs 0, encontram-se distribuídos os bits que formam as “palavras de
sincronismo ou de alinhamento de quadro”. Nos quadros ímpares, dos ITCs 0, encontram-se
distribuídos os bits que formam as “palavras de serviço” (palavras que podem assumir distribuições particulares e que transportam informações de alarmes, conforme já foi visto acima).
O bit 3, quando assume o valor 1, pode significar falha na alimentação, falha de codificador/
decodificador, falha do sinal de entrada de 2048Kbps, perda de alinhamento de quadro e taxa
de erro do sinal de alinhamento de quadro maior que 10-3.
NOTA:
Quando o terceiro bit da palavra de alinhamento de quadro for igual a 1, por três vezes, fica caracterizada a perda de sincronismo. Quando o terceiro bit da palavra de alinhamento de quadro for igual a 0, por duas vezes, fica caracterizada a resincronização
de quadro. O tempo de recuperação de sincronismo de quadro é da ordem de 0,5ms.
Perda de sincronismo do multiquadro
O ITC 16 do quadro 0 é utilizado para sincronizar o multiquadro (bits de 1 a 4). Os bits de 1 a 4
formam a palavra de alinhamento do multiquadro. O bit número 6, do mesmo ITC, é utilizado
para indicar a existência de alarme do multiquadro. Este bit poderá ser 1 ou 0. Será 0 quando
26
|
Rede de Computadores – Convergência das Redes
não houver alarme do multiquadro a ser enviado, ou será 1 quando houver alarme do multiquadro a ser transmitido. A perda de sincronismo do multiquadro ocorre quando duas palavras de sincronismo do multiquadro consecutivos apresentarem erro. A recuperação deste
sincronismo ocorrerá quando a primeira palavra de sincronismo do multiquadro for detectada como correta. A palavra de sincronismo do multiquadro já foi mostrada acima.
Sinalização de linha: Os demais quadros de um multiquadro têm o ITC 16 destinado às informações de sinalização de linha (atendimento, discagem, desligamento etc.)
O ITC16 é dividido em três partes a partir do quadro 1 até o quadro 15. Os quatro primeiros bits
são utilizados para transmitir sinalização associada aos canais de voz de 1 a 15 (bits 1 e 3). Os
bits 2 e 4 são colocados em 1. Os outros três bits seguintes são utilizados para transmitir sinalização associada aos canais 16 a 30 (bits 5 e 7) e o bit 8 é utilizado para transmitir informações
comuns entre microcomputadores (quadros ímpares, os bits 8 dos quadros impares do ITC 16
formam um byte, ou seja, um conjunto de 8 bits), ou são colocados em 1 (quadros pares).
NOTA:
A sinalização por canal comum pode ser também transmitida via ITC 16. Neste caso, o
ITC 16 é utilizado para transmitir informações comuns, da seguinte forma:
¨ 1 ITC 16=8 bits
¨ Taxa de transmissão de cada ITC 16=64Kbit/s
¨ Taxa de transmissão de cada bit do ITC 16=64Kbit/s/8=8000bit/s
Recuperação de relógio (freqüência de transmissão de bits)
Para permitir que o transmissor e o receptor dos sistemas digitais funcionem corretamente é
necessário não apenas manter o alinhamento de quadro e multiquadro, mas também garantir que os dois terminais (de origem e destino) trabalhem sincronizados.
Para que isto seja possível é necessário que os sinais de relógio dos dois terminais permaneçam sincronizados dentro de uma faixa média de variação permissível. Considerando um sistema completo de transmissão (transmissor A receptor B, transmissor B receptor A) é usual
que cada terminal de transmissão tenha seu próprio relógio. Entretanto, às vezes, é prático,
por exemplo, que o terminal transmissor A proporcione sincronismo para o terminal receptor
B. Neste caso, diz-se que o terminal receptor B é “escravo” do terminal transmissor A (mestre). No entanto, no sentido inverso, o receptor A será escravo do terminal transmissor B
(mestre); Conseqüentemente, todos os quatro terminais estarão funcionando à mesma taxa
originada no terminal transmissor A, uma vez que o sinal de relógio recebido no receptor B é
recuperado do sinal enviado pelo transmissor A e enviado pelo transmissor B ao receptor A.
Este tipo de transmissão de sinal de relógio é chamado de “Mestre – Escravo”.
Codificação de linha
Com o objetivo de evitar que os sinais digitais, principalmente os relativos a dados, ao serem transmitidos, sofram distorções muito acentuadas (o que impedirá a sua perfeita iden-
Princípios Básicos Sobre Transmissão Digital
|
27
tificação no terminal de recepção), bem como para eliminar os indesejáveis componentes
CC da linha de transmissão, foram criados códigos, chamados de “códigos de linha”, com o
objetivo de minimizar estes efeitos. Um dos códigos mais utilizados, por reunir condições
necessárias que minimizam este efeito, e por ser de implementação relativamente fácil, é o
código HDB-3 (third-order, high-density bipolar code). Este código, derivado do código AMI
(Alternate Mark, Inversion code), tem como objetivo evitar que uma seqüência grande de
zeros seja transmitida seguidamente na linha, o que poderia indicar uma degeneração do
sinal transmitido.
Para a construção de um código HDB-3 existem regras tanto para codificá-lo como para decodificá-lo.
Técnicas de codificação diferencial
Os sinais de voz e vídeo possuem pouca variação de amostra para amostra, o que possibilita
se prever com alguma confiança o valor de uma amostra a partir das amostras anteriores.
Esse valor previsto possuirá um determinado erro, porém a variação desse erro é muito menor que a das amostras. As técnicas de codificação diferencial exploram esta característica, e
transmitem apenas a informação referente à diferença entre os valores previstos e os valores
atuais (erro).
A vantagem dessa técnica é que são necessários menos bits para a codificação do erro do que
na codificação de uma amostra utilizado pelo PCM.
Existem dois tipos de modulação, que utilizam as técnicas de codificação: a modulação delta
(DM) e o PCM diferencial (DPCM).
A próxima figura mostra o diagrama de blocos do codificador e do decodificador do modulador delta.
Figura 1.23- Codificador e Decodificador do modulador delta
Observe na figura acima que o integrador realimenta a entrada ( x (t )). Denomina-se erro de
predição ao valor de x(t) – x’(t). Esse erro é quantizado e usado na próxima predição. A próxima figura mostra o sinal modulado.
28
|
Rede de Computadores – Convergência das Redes
Figura 1.24 Exemplo de sinal delta-modulado
Na saída do modulador delta o erro de predição quantizado é realimentado via integrador à
entrada do modulador.
No demodulador existe um filtro passa-baixo, conforme mostra a próxima figura, o qual recupera o sinal analógico original.
Figura 1.25 - Demodulador delta
A modulação sigma-delta, na qual são utilizados componentes com mais larga integração, é
uma evolução da modulação delta.
O desempenho da modulação delta, portanto, depende da variação do sinal entrante. Observe na próxima figura que quanto maior for a variação no tempo do sinal analógico, mais
erros ocorrem na quantização.
Figura 1.26 - Sinal analógico codificado
Princípios Básicos Sobre Transmissão Digital
|
29
Na modulação delta adaptativa (ADM) o desempenho de um modulador delta pode ser muito melhorado, se o passo de quantificação (Δ) for ajustado em função do sinal de entrada, de
modo a eliminar a saturação de declive, conforme indica a próxima figura.
Figura 1.27 – Relação Δ x saturação
Na modulação PCM diferencial (DPCM) assume-se que existem L níveis de quantificação. A
próxima figura mostra o esquemático do conjunto codificador/decodificador DPCM.
Figura 1.28 - Codificador/Decodificador DPCM
O declive do quantificador deve ser superior ou igual à variação máxima do sinal de entrada
para se evitar a saturação de declive. Quando L >> 1 a frequência de amostragem fs pode ser
no mínimo fs = 2fmax.
Comunicação de dados com/sem estrutura de quadros
Quando a transmissão de dados obedece a uma estruturação em quadros, como, por exemplo, o PCM trata-se de comunicação de dados com estrutura de quadro, na qual os dados
são inseridos em intervalos de tempo (“time slots”), e existe um intervalo de tempo para o
sincronismo entre o transmissor, e o receptor.
30
|
Rede de Computadores – Convergência das Redes
Por outro lado, a comunicação de dados sem estrutura de quadros é um fluxo de dados binários de forma contínua, sem estrutura interna de quadros, onde, porém podem ser transportados os pacotes dos protocolos de comunicação de dados.
A comunicação de dados sem estrutura de quadros pode ser efetuada através de uma variedade de interfaces, e com uma variedade de métodos de codificação.
Informações sobre tempo podem estar embutidas nos dados. Nesse caso o receptor extrai o
relógio (“clock”), antes que o valor dos bits possa ser determinado. Alternativamente, o relógio pode acompanhar os dados numa linha separada, de modo esteja disponível diretamente
para uso pelo receptor.
Análise das linhas de transmissão
Constante de propagação, Constante de atenuação, Constante
de fase, Impedância característica, Distorção
Uma linha de transmissão se diferencia dos circuitos comuns devido ao fato de que nas linhas de transmissão os parâmetros resistência, indutância, capacitância e condutância estão
distribuídos ao longo da linha, o que não acontece com os circuitos comuns, onde estes parâmetros estão concentrados em unidades.
Para se estudar as linhas de transmissão se consideram trechos muito curtos dessas linhas, e
desta forma se adotam os parâmetros como concentrados nestes curtos trechos da linha de
transmissão, a fim de aplicar a teoria dos circuitos comuns, para analisar o comportamento
das linhas de transmissão.
Se considerarmos a linha de transmissão com comprimento infinito, sua impedância de entrada não dependerá da impedância de carga inserida no final da linha, pois neste caso uma
tensão e corrente aplicadas à entrada da mesma não chegará ao final, e assim a impedância
de carga não influirá nas características da linha de transmissão.
Considerando-se o acima exposto, quando se aplica uma tensão na entrada de uma linha
de transmissão com comprimento infinito, surgirá uma corrente de entrada proporcional à
tensão, e inversamente proporcional à impedância de entrada da linha de transmissão. Esta
impedância de entrada é denominada de impedância característica da linha de transmissão
(Zo), a qual conforme já detalhamos acima, independe da impedância de carga inserida na
sua terminação.
Se uma linha de transmissão possui comprimento finito, porém a resistência de carga na sua
terminação for exatamente igual à impedância característica, a tensão e corrente que surgirão na linha de transmissão não sofrerão alterações na impedância de carga, e desta forma
nada será alterado, e tudo se passa como se essa linha de transmissão tivesse comprimento
infinito. Este fato se denomina “casamento de impedância”, que significa dizer que a impedância de carga (Zr) é igual a impedância característica da linha (Zo).
Note, que tratando-se de uma linha de transmissão de comprimento infinito as tensões e
correntes alternadas inseridas na entrada dessa linha irão trafegar pela linha, e os seus pontos irão apresentar valores positivos e negativos.
Princípios Básicos Sobre Transmissão Digital
|
31
Existirá, então, ao longa da linha, uma onda caminhante com tensões distribuídas e correntes opostas.
Se relação Voltagem incidente/Corrente incidente (V/I) for igual a Zr teremos um “casamento
de impedância” e toda a energia da onda incidente será absorvida por Zr. Entretanto, se esta
relação não for igual a Zr, o que acontece na maioria das vezes, não irá ocorrer a absorção
total da energia da onda incidente, pois parte desta energia será refletida em Zr, ou seja, haverá reflexão da onda em Zr. Neste caso surgirá uma onda refletida caminhando no sentido
contrário à onda incidente, denominada “onda refleftida”.
A somatória da onda incidente com a onda refletida gera uma onda estacionária, e os valores
de tensão e corrente medidos ao longo da linha irão apresentar os valores dessa onda estacionária. Note, que um voltímetro comum mede a voltagem referente à onda estacionária.
Se você desejar medir a voltagem ao longo da linha apenas da onda refletida, deverá utilizar
um equipamento de teste denominado “refletímetro”, o qual consegue informar as voltagens das ondas refletida e incidente, separadamente.
Abaixo mostramos os parâmetros mais importantes das linhas de transmissão.
R’ = Resistência/m da linha de transmissão (Ohms/m)
L’ = Indutância/m da linha de transmissão (Henrys/m)
G’ = Fuga/m na linha de transmissão (Mho/m)
C’ = Capacitância/m da linha de transmissão (Farads/m)
Z’ = Impedância/m da linha de transmissão
Y’ = Admitância/m da linha de transmissão
P = Constante de propagação
A = Constante de atenuação
F = Constante de fase
O recíproco da resistência é denominado de condutância (G = 1/R), e o recípocro da reatância
é denominado de suscetância (B = 1/X).
A impedância de uma resistência é R, a impedância de um indutor é jwL = jXL e a impedância
de um capacitor é 1/jwC = -j/wC = JXC . A impedância de um circuito equivalente com múltiplos elementos em série e em paralelo é igual Z = R + jX.
A admitância de um elemento é definida como sendo a inversa de sua impedância, ou seja,
Y = 1/(R + jX), e a sua unidade é o Siemens (S). Por exemplo, se Z = 2Ω - j6Ω, então Y = 1/
(2Ω - j6Ω).
NOTA:
Não se pode dizer que y = 1/(R) + 1/(jX). Apesar de que a impedância e a admitância
são números complexos, eles não são considerados “fasores”, pois os “fasores” são
representações de funções senoidais, as quais variam com o tempo, e Z e Y não variam
em relação ao tempo.
32
|
Rede de Computadores – Convergência das Redes
Considerando-se um trecho elementar da linha de transmissão (dx), podemos dizer que os
parâmetros estão concentrados em dx. Teremos, então, uma impedância com valor igual Z’dx
opondo-se à passagem de corrente através de dx, ocasionando uma queda de tensão com
valor igual dV. Por outro lado teremos uma admitância de um condutor para outro com valor
igual a Y´dx, o que representa uma “fuga” de corrente dI.
dV = I.Z´dx
dI = V.Y´dx
Podemos representar Z´ conforme abaixo indicado:
Z’ = R’ + j*w*L’(1)
w = Velocidade angular = 2*π*f, onde f = freqüência da onda(2)
Por outro lado podemos representar Y´como:
Y’ = G’ + j*w*C’(3)
Zo = Impedância característica da linha de transmissão
Zo = (Z’/Y’)1/2(4)
R = Coeficiente de reflexão = (Zr – Zo)/(Zr + Zo)(5)
A “constante de propagação” (P) é representada por:
P = (Z’*Y’)1/2 = A + j*F(6)
P = [(R’ + j*w*L’)*(G’ + j*w*C’)]1/2(7)
A constante de atenuação (A) é medida em Neper, portanto adota-se neste caso “An”:
An = ln (Vs/Ve), ou ln (Is/Ie), onde ln significa logaritmo neperiano.
Costuma-se trabalhar com atenuações em dB. Neste caso a constante de atenuação é representada por AdB. Conforme já detalhamos anteriormente, dB = 10.log(Ws/We), onde Ws é
potência de saída e We é a potência incidente.
(Ws/We) = (Is/I1)2, ou (Vs/Ve)2
ln(Ws/We) = 2.ln(Is/Ie) = 2.An
(Ws/We) = e2.An
AdB = 10.log(Ws/We)
(Ws/We) = 10(AdB/10)
(Ws/We) = (e2,3) (AdB/10)
e2.An = (e)[(2,3.AdB)/10]
Princípios Básicos Sobre Transmissão Digital
|
33
2An = (2,3.AdB)/10
AdB = 8,686 An(8)
O que significa dizer, que, por exemplo, uma atenuação de 3dB é aproximadamente igual a
uma atenuação de 0,3454Nepers.
A velocidade de fase (Vf) é a velocidade com que uma onda se desloca. A fase é determinada
pela parte imaginária de P.
Vf = w/F(9)
λ= Comprimento de onda
F = 2.π/λ(10)
Vf = 2.π.f/(2.π/λ) = λ.f
Vf = λ.f (11)
No vácuo a permissividade elétrica (εo) vale: 8,85.10-12 F/m; e a permeabilidade megnética
(µo) vale: 1,257.10-6 H/m.
A permissividade elétrica de um material qualquer vale εo.εr; e a permeabilidade megnética
é: µo. µr. Por exemplo, para o vidro εr = 5, a Vf = c/(εr)1/2, ou seja, é c/(5)1/2, onde c é a
velocidade da luz, e o comprimento de onda é igual a λo/(εr)1/2.
Tratando-se de linhas de alta freqüência, o estudo torna-se mais simples do que o estudo de
linhas com baixa freqüência, pois neste caso, os efeitos reativos predominam sobre os efeitos
resistivos. Desta forma, podemos considerar que a resistência da linha é desprezível em relação à reatância indutiva, e a condutância é desprezível ante a admitância capacitiva.
Nesse caso as fórmulas acima apresentadas tornam-se simplificadas, conforme abaixo:
Zo = (L’/C’)1/2(12)
P = j*w*(L’*C’)1/2(13)
Portanto:
F = w*(L’*C’)1/2(14)
Exemplo numérico:
Um gerador aplica 1V a 1000Hz em uma linha telefônica com 100Km de comprimento, terminada em uma resistência de 200Ω. As características desta linha de transmissão estão
apresentadas abaixo:
R’ = 10,4Ω/Km; L’ = 0,00367 H/Km; G’ = 0,8*10-6 υ/Km; C’ = 0,00836 µF/Km.
Qual será a impedância característica desta linha de transmissão, e a constante de propagação? Qual será a velocidade de fase?
34
|
Rede de Computadores – Convergência das Redes
Z’ = 10,4 +j*2*π*1000*0,00367 = 25
Y’ = (0,8 + j*2*π*1000*0,00836)*10-6 = 52,53*10-6
Zo = Zo = (Z’/Y’)1/2 = 690
P = (Z’*Y’)1/2 = 0,0362
= 0,00755 + j*0,0355
A = 0,00755; F = 0,0355
Vf = w/F = 2*π*1000/0,0355 = 177.000Km/s.
Linhas de transmissão sem perdas
Da análise de Fourier, chega-se a conclusão, que uma onda não senoidal, ou até mesmo
transitória, pode ser representada como uma somatória de ondas senoidais. Assim sendo, os
resultados para estes tipos de onda são as somatórias das fórmulas mostradas anteriormente, aplicadas a cada componente senoidal da onda não senoidal.
Uma linha de transmissão sem perda possui R’=G’=0, daí P = j*w*(L’*C’)1/2, e A = 0 para
todas as freqüências.
Vf = w/F = w/[w(L’*C’)1/2] = 1/(L’*C’)1/2, portanto, constante, e igual para todas as freqüências. Concluímos então, que nas linhas de transmissão sem perdas, todas as freqüências
se propagam com a mesma velocidade, e sem atenuação, sendo que desta forma, o sinal
recebido possuirá os mesmos componentes de várias freqüências do sinal transmitido, sem
nenhuma alteração, e esta linha de transmissão sem perdas, não distorce o sinal recebido.
Linhas dispersivas
Na prática, as linhas de transmissão causam perdas impossíveis de serem eliminadas, principalmente devido a resistência série da linha (R’). Neste caso, A e F tornam-se funções da freqüência,
o que significa dizer, que os vários componentes com diferentes freqüências são transmitidos com
diferentes atenuações e velocidades, o que acarreta na dispersão da onda transmitida.
Exemplo numérico:
Uma linha de transmissão com 20Km de extensão recebe na entrada, a seguinte onda (amplitude em função do tempo):
Vi(t) = 12V*sen2*π*(1000)*t + 9V*sen2*π*(3000)*t
Abaixo, mostramos as características desta linha de transmissão por quilômetro. Qual será a
fórmula do sinal, estando a linha de transmissão terminada em uma impedância igual a Zo?
Princípios Básicos Sobre Transmissão Digital
|
35
Tabela 1.2 Características de Determinada Linha de Transmissão
Freqüência (Hz)
Const. de atenuação (Neper) Constante de fase
100
0,05
0,10
1000
0,05
0,31
2000
0,10
0,42
3000
0,10
0,62
Após os 20Km a atenuação será:
B= Em 1000Hz: 20*0,05 = 1 Neper
B= Em 3000Hz: 20*0,10 = 2 Nepers
B= Em 1000Hz, temos: Neper = ln (Vi/Vs) = ln (12/Vs) = 1. Daí, Vs = 12*e-1 = 4,4V.
B= Em 3000Hz, temos: Neper = ln (9/Vs) = 2. Daí, Vs = 9* e-1 = 1,2V.
Os ângulos de fase após os 20Km serão:
φ1 = 20*0,31 = 6,2 radianos; φ2 = 20*0,62 = 12,4 radianos.
O sinal recebido possuirá então a seguinte fórmula, já que a linha possui casamento de impedância:
Vr(t) = 4,4V*sen[2*π*(1000)*t + 6,2] + 1,2V*sen[2*π*(3000)*t + 12,4]
Conforme podemos constatar ao se comparar as fórmulas dos sinais incidente e recebido,
existe distorção da onda transmitida.
Análise de linha de transmissão com cabo coaxial
O sinal alternado aplicado no condutor interno de um cabo coaxial cria um campo elétrico e,
com a existência de energia elétrica e magnética surge um sinal V(t,x) e I(t,x), que se propagará como um onda ao longo do cabo.
Podemos representar esta linha de transmissão por uma sucessão de indutores e capacitores, como mostra a figura a seguir.
Figura 1.29 - Representação gráfica de uma linha de transmissão de cabo coaxial.
36
|
Rede de Computadores – Convergência das Redes
Na figura acima apresentada L’ e C’ são, respectivamente, a indutância e a capacitância por
unidade de comprimento.
Analisando-se o circuito entre x e x + dx nota-se, que a indutância é a responsável pela queda
de tensão, dV = V(x + dx) – V(x), entre x e x + dx, pois a corrente varia em relação a x. Admita,
que:
Por outro lado a tensão ao longo de x também varia em função da carga acumulada pela
capacitância, a qual pode ser calculada através da diferença de corrente dI = I(x + dx) – I(x)
entre x e x + dx, conforme mostramos a seguir.
A equação da onda que satisfaz a corrente I e a tensão V está mostrada a seguir.
Vf é a velocidade de fase = 1/(L´,C´)1/2
“Crosstalk” em Linhas de Transmissão
Indutância e Capacitância Mútua
O “crosstalk” pode ser definido como o acoplamento de energia de uma linha para outra
através da capacitância mútua (campo elétrico) e da indutância mútua (campo magnético).
A figura 1.30 mostra o esquema explicativo do que é capacitância mútua e indutância mútua.
Figura 1.30 - Representação gráfica de capacitância e indutância mútua.
A indutância mútua é responsável pela indução de corrente na linha adjacente, a qual possui
sentido contrário ao sentido da corrente inserida na linha de transmissão (Lei de Lenz). Por
outro lado, a capacitância mútua ocasiona a passagem de corrente de uma linha para outra,
a qual flui em ambas as direções.
As equações abaixo detalham de forma matemática o acima exposto.
VLm = Lm
dI
dV
I Cm = C m
dt ;
dt
Princípios Básicos Sobre Transmissão Digital
|
37
As correntes acima apresentadas se somam e produzem o que se denomina de “near” e “far”
crosstalk. O “near crosstalk” é responsável pelo ruído de “crosstalk” no lado onde o sinal de
dados foi inserido na linha de transmissão, enquanto o “far crosstalk” é responsável pelo
ruído de “crosstalk” que surge no lado oposto onde foi inserido o sinal de dados, conforme
detalha a figura abaixo.
Figura 1.31 – “Near” e “Far” “Crosstalk”.
Levando-se em consideração que no caso do “near crosstalk” as correntes ICm e ILm sempre
se somam essa corrente resultante é positiva. Por outro lado, o “far crosstalk”, pode ser positivo, ou negativo, dependendo dos valores de ICm e ILm.
A figura 1.32 esclarece fisicamente a obtenção das correntes Inear e Ifar referentes aos
“crosstalk” “near” e “far”, respectivamente, para um pulso do sinal de dados. Nessa figura,
Ta representa o tempo de atraso de propagação do pulso de dados ao longo da linha de
transmissão e Tp representa o tempo de propagação do sinal na linha (atraso total).
38
|
Rede de Computadores – Convergência das Redes
Figura 1.32 Representação física de I
near
eI
.
far
Observe na parte superior direita da figura acima, que o pulso referente ao “near crosstalk”
é bem mais largo que o pulso referente ao “far crosstalk” para T = 2Ta.
Filtros
Podemos definir um filtro como um dispositivo capaz de atenuar a quantidade de energia
presente em sinais com determinadas freqüências, ou faixas de freqüências, e de não atenuar o restante das freqüências disponíveis no sistema. Desse modo as freqüências não atenuadas são, digamos, filtradas. Os filtros podem, entre outros, serem classificados como:
Filtros Passa Alta e Passa Baixa: Permitem a passagem do sinal com freqüência acima (PassaAlta, High Pass, ou Low Cut) ou abaixo (Passa-Baixa, Low Pass, ou High Cut), respectivamente,
de uma determinada freqüência, a qual é denominada de freqüência de corte. Na realidade,
a freqüência de corte é a freqüência na qual o nível do sinal sofre uma atenuação de 3dB em
relação aos níveis dos sinais que são filtrados, conforme mostra a próxima figura.
Figura 1.33 – Gráficos de filtros Passa-Alta e Passa-Baixa.
Princípios Básicos Sobre Transmissão Digital
|
39
Na figura acima o slope é a curva que mostra a atenuação dos sinais que não estão sendo filtrados. Note, que no caso da figura acima os filtros não proporcionam um corte abrupto dos
sinais, uma vez que a inclinação do slope não possui um ângulo próximo de 90 graus. Note,
que quanto mais acentuada for a atenuação dos sinais a partir da freqüência de corte, maior
é o slope, e quanto mais suave for essa atenuação, menor é o slope. Os valores do slope são
geralmente calculados em dB por oitava (dB/8va), ou seja, pela quantidade de dBs atenuados
a cada oitava acima (ou abaixo) da freqüência de corte. O slope também pode ser determinado através do seu “número de ordem”, onde cada ordem equivale a 6 dB/8va. Por exemplo,
a terceira ordem significa uma atenuação de 3x6 = 18 dB/8va. Note que quanto maior for a
ordem do filtro, mais preciso é filtro. Por outro lado, os filtros de ordem alta são mais difíceis
de serem fabricados e mais caros.
Passa Banda (ou Faixa): Pode ser definido como uma combinação dos filtros Passa-Alta e
Passa-Baixa, para o qual existe uma freqüência de corte inferior e uma superior, conforme
ilustra a próxima figura.
Figura 1.34 – Gráficos de filtro Passa-Faixa.
O fator Q de um filtro é determinado através da seguinte expressão matemática:
Q= fc/(f2 – f1), onde fc é a freqüência de corte, e f2 – f1 define a faixa de freqüências filtrada.
Quando o fator Q é alto o filtro atua em uma estreita faixa de freqüências. Por outro lado, um
fator Q baixo determina que o filtro opera sobre em uma faixa mais larga de freqüências.
Notch: São filtros projetados para rejeitar uma faixa bastante estreita de freqüências, dentro
de uma faixa larga de freqüências, conforme mostra a próxima figura.
Figura 1.35 – Gráficos de filtro Notch.
40
|
Rede de Computadores – Convergência das Redes
Introdução à teoria das filas
As modernas comunicações de dados fragmentam as mensagens digitais (bits) em pacotes,
a fim de otimizar o meio físico de comunicação, conforme veremos mais a frente. A teoria
das filas é um método matemático, através do qual se obtém as características das linhas de
comunicação de dados.
Esta teoria matemática considera o tráfego dos pacotes no meio de comunicação, segundo
uma distribuição de Poisson, onde a probabilidade de exatamente n mensagens chegarem
em s segundos é calculada de acordo com a fórmula abaixo apresentada:
Pn (s) = {[(RMC*s)n]/n!}*e(-RMC*s)(1)
RMC*s = Razão média de chegada dos pacotes (RMC), também denominada de razão de
tráfego, no intervalo de tempo s (s).
n = número exato de pacotes que chegam no intervalo de tempo s = 1, 2, 3 ...
Utilizando-se segundo, para a medição do intervalo de tempo s, a RMC deve ser em pacotes
por segundo.
A intensidade do tráfego (IT) é uma medida simplificada da utilização do canal de comunicação, ou seja, mede a porcentagem de tempo de utilização do meio de comunicação. O tempo
médio de serviço (TMS), ou tempo de atendimento, expressa o intervalo de tempo necessário, para que um pacote entregue à linha seja entregue ao seu destino. O tempo médio entre
as chegadas dos pacotes (TMCP) mede o intervalo de tempo entre as chegadas à linha de
comunicação, de dois pacotes consecutivos. A IT é expressa em Erlang em homenagem ao
dinamarquês A. K. Erlang, que foi o pioneiro na teoria das filas.
IT = TMS/TMCP(2)
A fração do tempo em que um canal de comunicação fica ocupado, ou seja, a utilização da
linha (UL), é calculada conforme a fórmula apresentada a seguir:
UL = RMC*TMS(3)
Observe, que o UL pode chegar no máximo a 1, o que representa 100% de utilização da linha
de comunicação (trabalha 100% do tempo).
Quanto maior for a UL, maior é a quantidade de pacotes que trafegam no meio de comunicação, e conseqüentemente maior é o tempo de espera dos pacotes na fila, para que sejam
entregues ao destinatário, aumentando assim, a “Fila de espera” dos pacotes. Quando a UL
chega a 1, a linha fica saturada, e neste caso, o meio de comunicação está trabalhando 100%
do tempo.
Na prática, adota-se UL abaixo de 70% e no máximo 90%, pois quando a UL tende a um a fila
de espera, aumenta significantemente, e na saturação, tende ao infinito. Além disto, o tempo
de resposta e limitação do volume de memórias dos equipamentos exigem a adoção da UL
conforme acima especificada.
O tempo médio de espera dos pacotes na fila de espera (TME) pode ser calculado conforme
a fórmula abaixo apresentada:
Princípios Básicos Sobre Transmissão Digital
|
41
TME = [(UL)*(TMS)[/(1 – RMC)(4)
A quantidade média de pacotes esperando na fila (QMP) é calculada segundo a fórmula abaixo:
QMP = UL2/(1 – UL)(5)
O número máximo de pacotes que esperam p% do tempo de espera na fila, ou menos,
(N(p%)) é calculado conforme abaixo:
N(p%) = {log10[1 – (p/100)]/log10(UL)} – 1, onde p é a porcentagem do tempo de espera dos pacotes.
Exemplo numérico:
Considere que chegam pacotes em uma linha de transmissão de dados conforme a distribuição
de Poisson, com uma razão média de chegada (RMC) igual a 270 pacotes/segundo. O tempo de
transmissão é proporcional ao comprimento da mensagem, com uma distribuição aproximadamente exponencial. O comprimento médio dos pacotes é de 576 bytes, e a taxa de transmissão
na linha (TTL) é de 2Mbps. Qual é o tempo médio de espera (TME), qual a quantidade média de
pacotes que estarão esperando na fila (QMP), e 90% de percentual (P(90))?
A razão média de chegada de pacotes (RMC) está calculada a seguir:
RMC = 270 pacotes/s
O tempo médio de serviço (TMS - atendimento) é igual a:
TMS = 576 bytes/(2.048.000bps/8bit) = 0,00225 s/pacote
A utilização da linha (UL) é:
UL = RMC*TTL = 270*0,00225 = 0,60 (60%)
O tempo médio de espera dos pacotes na fila é:
TME = [(UL)*(TMS)[/(1 – RMC) = ( 0,6*0,00225)/(1 – 0,6) = 3,375ms
A quantidade média de pacotes esperando na fila (QMP) está calculada a seguir:
QMP = UL2/(1 – UL) = 0,36/0,4 = 0,9 pacotes
A quantidade média de pacotes esperando na fila a 90% de percentual do tempo médio de
espera está calculada abaixo:
N(90) = {log10[1 – (p/100)]/log10(UL)} – 1 = log10[(1 – 0,9)/log10(0,6)] – 1 = 3,5, ou seja, 3,5
pacotes, ou menos, esperam 90% do tempo médio de espera na fila (0,9*3,375ms).
Aterramento
Aterramento é a conexão com toda a terra, por onde passarão os eventos elétricos de/e para
o mencionado sistema. Estes eventos elétricos incluem energia (surtos e transientes).
Entre estes eventos, encontra-se também a energia proveniente das descargas atmosféricas.
42
|
Rede de Computadores – Convergência das Redes
O aterramento é obrigatório; a baixa qualidade ou a falta do mesmo invariavelmente provoca
queima de equipamentos.
Suas características e eficácia devem satisfazer às prescrições de segurança das pessoas e
funcionais da instalação.
Para fazer aterramento, utilize haste de cobre com 2,40 ou 3 metros de comprimento e diâmetro de 16 mm.
NOTA:
Nunca utilize o neutro da rede elétrica como “terra”, pois além de muito perigoso, é
proibido por lei.
Objetivos do aterramento elétrico
Os sistemas de aterramento devem atender cada uma das funções abaixo relacionadas:
¨ O “Terra” ou Ponto Referência de Terra. Todo sistema elétrico ou eletrônico deve
ser referenciado à terra. Este tipo de aterramento é chamado normalmente de
“Terra”. O ponto de “terra”, neste caso, providencia uma referencia comum para
os circuitos dos sistemas. Em muitos casos, o valor de resistência dos pontos de
referência é de pequena importância. Para estes pontos, a referência de terra irá
satisfazer apenas os requisitos funcionais. Estes sistemas são normalmente independentes não requerendo interconexões com a terra, exceto quando necessário
proporcionar segurança às pessoas, não permitindo a presença de potenciais perigosos. Um exemplo típico é um terminal de computador, onde o fio verde (terceiro
pino da tomada) é o ponto de referência.
¨ O aterramento de neutralização de um sistema de pára-raios. Normalmente o aterramento de um sistema de proteção contra descargas atmosféricas é tratado como
mencionado no item acima, mas na realidade ele é bem diferente. Na realidade
este “terra” deveria ser chamado de “sistema de neutralização de cargas”, devido
a natureza da eletricidade atmosférica e ao mecanismo das descargas atmosféricas. As nuvens de tempestade induzem na superfície do solo, uma sombra de
cargas elétricas de igual, porem opostos potenciais. Quando uma descarga elétrica
atinge um ponto ou estrutura na terra, o canal ionizado (condutor de eletricidade)
então formado entre estes dois corpos (terra e nuvem), permitirá a equalização
das cargas opostas. Neste momento, toda a carga elétrica induzida pela nuvem
de tempestade (na superfície da terra, nas estruturas das edificações, nos sistema
elétricos e eletrônicos, e em tudo que estiver abaixo da nuvem), deverá se mover
em direção ao ponto de contato da descarga, e a neutralização deverá ser processada em 20 microsegundos ou menos. Desta forma, os sistemas elétrico, eletrônico, ou qualquer outra parte do local sob influência da nuvem, deverão ter um
caminho de baixa resistência e baixa impedância em direção ao ponto de contato
de uma descarga atmosférica. Desta forma, os requisitos de funcionamento de
um aterramento de pára-raios não devem se restringir apenas nos baixos valores
de resistência ôhmica (CC- Corrente Contínua), mas também no caminho de baixa
impedância.
Princípios Básicos Sobre Transmissão Digital
|
43
¨ O aterramento de interface com o solo. Deverá proporcionar um contato efetivo
com o solo ao redor. Isto é, quanto menor a resistência ôhmica entre os componentes do sistema e o solo em volta, melhor, mais eficiente e seguro o aterramento
será. Estes sistemas normalmente necessitam também de um ponto de referência
ao terra, uma capacidade de neutralização das cargas elétricas induzidas pelas nuvens de tempestade e uma interface de baixa impedância com a terra. Pelo exposto acima, e em particular no item 2, podemos entender a necessidade de critérios
ao se projetar e instalar um sistema de proteção contra as descargas atmosféricas.
A interligação dos diferentes aterramentos e condutores de descidas dos sistemas
tem fundamental importância para a efetividade e segurança desejada. Entretanto, alicerçadas na aleatoriedade de ocorrência de raios e nos períodos longos que
podem ocorrer entre um evento e outro, muitas empresas prestadoras de serviços
da área insistem em direcionar seus objetivos para alternativas de baixo custo e
confiabilidade duvidosa. Voltamos a afirmar, uma proteção efetiva não dispensa
os requisitos fundamentais: materiais de qualidade e apropriados para o uso e
em quantidade necessária a atender os conceitos da boa técnica e da evolução da
tecnologia. Logicamente, os custos estão diretamente relacionados a estes parâmetros, ou seja, recebemos pelo que pagamos.
Você precisa atender aos quatro itens abaixo, para ter um bom sistema de aterramento:
¨ Baixa indutância: Utilize eletrodos ou hastes de aterramento de excelente qualidade.
¨ Baixa impedância: Faça tratamento de solo, o que proporcionará boa resistividade,
e conseqüentemente garantia de condutividade elétrica entre a haste de aterramento e o solo.
¨ Conectores: Que não permitam fuga de tensão.
¨ Manter o sistema de aterramento sempre úmido: Utilize uma maneira de colocar
água no sistema de aterramento, sempre que necessário.
Instalando o aterramento
1) Fazer perfuração no solo com um trado de 100 mm, variando de 1,5 a 2 metros de profundidade. Enterrar a haste neste buraco.
2) Adicionar solução condutora, misturar terra com um talco vegetal + água, ela atuará de
duas formas: -1ª) vai conservar a umidade do solo -2ª) vai garantir a condutividade elétrica
entre a haste e o solo.
3) Fazer uma caixa de inspeção usando cano de esgoto de 100 mm com tampa, a fim
de dar proteção às conexões e permitir revisões periódicas da resistência elétrica.
Molhar a cada 90 dias o sistema de aterramento.
A figura abaixo mostra as etapas de instalação de um sistema de aterramento.
44
|
Rede de Computadores – Convergência das Redes
Figura 1.36 - Instalação de um sistema de aterramento.
O Aterramento é um requisito importante para o perfeito funcionamento dos equipamentos
e deverá apresentar as seguintes características:
¨ Tensão Neutro - Terra:………..< 1 V AC
¨ Impedância do Terra:………....< 5 Ohms
A próxima figura mostra a maneira correta de ligação da tomada tripolar.
Figura 1.37 - Esquemático de ligação da tomada tripolar.
Se houver inversão de posição, ou seja, fase, do lado esquerdo, teremos tensão N -T=220V
ao invés de 0V, o que com certeza danificará vários circuitos. O valor da resistência de aterramento, obtido com o uso do “Terrômetro”, deverá ser menor ou igual a 5 ohms.
É totalmente inaceitável a utilização do fio neutro curto-circuitado ao fio terra.
Princípios Básicos Sobre Transmissão Digital
|
45
Detalhamento
Vamos nos deter ao aterramento do neutro, porém os comentários aqui descritos valem
também para sistemas de aterramento de proteção. O curto-circuito entre fase e terra é um
dos defeitos mais comuns nas instalações elétricas. Quando ocorre este tipo de defeito, e
existir retorno de corrente entre os pontos de aterramento, e o local onde se originou este
defeito surgem potenciais elétricos extremamente perigosos, que tendem a aumentar com a
elevação da capacidade dos sistemas, e suas interligações.
Para limitar estes potenciais elétricos, principalmente no ponto de aterramento utiliza-se um
sistema multiaterrado, o qual é constituído por vários pontos de aterramento, afastados de
forma conveniente e interligados entre si, de tal forma que cada um destes pontos de aterramento seja percorrido por apenas uma parcela da corrente de defeito, o que resulta em
menores gradientes de potenciais, conforme mostra a figura a seguir.
Esses pontos de aterramento são compostos, basicamente, por um conjunto de cabos e/ou
hastes interligadas entre si, e com o sistema elétrico.
Figura 1.38 - Distribuição de correntes de falha à terra.
Todo sistema de aterramento, para que possa ser considerado como de boa qualidade, deve
apresentar as seguintes características:
¨ Capacidade de condução de corrente: Seu valor está associado ao tempo de eliminação da falha, ao tipo de conexão utilizada, ao material constituinte dos cabos e/
ou hastes de aterramento empregados e às características do solo.
¨ Segurança: O índice de segurança característico de uma instalação depende do
dimensionamento do sistema de aterramento, que deverá ser executado de tal forma que os potencias resultantes (para a corrente de falha acima referida) estejam
em conformidade com os limites estabelecidos pelas normas técnicas.
¨ Estabilidade: Para obter um sistema estável, ou seja, que apresente invariabilidade no valor da resistência de aterramento com relação às condições climáticas, é
necessário instala-lo em um meio que apresente resistividade constante, o que
pode ser obtido artificial, ou naturalmente. Para se obter resistividade constante,
através de processo artificial, deve ser utilizado tratamento químicos do solo, que
cause a estabilidade ao longo do tempo, e características higroscópicas, que mantenham o solo tratado sob determinado índice de umidade. Os meios naturais são
fornecidos pelo próprio solo, à profundidade tais, que as variações sazonais não
alterem suas condições de umidade, pressão, e temperatura.
46
|
Rede de Computadores – Convergência das Redes
¨ A camada superficial do solo está continuamente sujeita às variações sazonais, e
conforme mostra a Tabela 1.3, seu índice de umidade assume valores, que devem
ser considerados no projeto do sistema de aterramento. Além disto, a resistividade
do solo varia também com a sua temperatura atmosférica, porém não de maneira
tão significante, quanto com a umidade.
Tabela 1.3 Características da Camada Superficial do Solo
Índice de umidade Resistividade de solo Redução com relação
(% por peso)
arenoso (ΩXm)
a 0%
0
10000000
X
2,5
1500
6666
5
430
23255
10
185
54054
15
105
95238
20
63
158730
30
42
238095
¨ Tempo de vida útil: O tempo de vida útil de um sistema de aterramento é determinado pelos seguintes fatores: material de que é constituído, agressividade do solo,
e existência de potenciais que possam provocar corrosão de origem galvânica. Nos
sistemas de aterramento são utilizados basicamente aço galvanizado (zincado) e
aço revestido de cobre (“copperweld”). O aço galvanizado possui menor preço,
porém tendo em vista a agressividade média natural do solo brasileiro, seu tempo
de vida é bastante limitado.
¨ Baixa resistência de aterramento: Para obter baixo valor de resistência de aterramento, podem ser utilizados os seguintes artifícios:
1) aumentar as dimensões (diâmetro e comprimento) dos componentes do sistema de
aterramento.
2) interligar vários elementos em paralelo.
3) reduzir a resistividade do meio circundante. A interligação de hastes em paralelo reduz
o valor o valor da resistência de aterramento, considerando-se todo o conjunto de hastes de
aterramento, porém não segue a lei de paralelismo de resistências, apresentando tendência
à saturação, isto é, a se manter constante a partir de um determinado número de hastes de
aterramento. Portanto, esta alternativa possui limitações dadas pela área necessária para a
implantação do sistema de aterramento, e pela saturação do solo. Aumentando-se o diâmetro da hastes obtêm-se uma redução mínima no valor da resistência de aterramento, e para
grandes diâmetros verifica-se saturação. Por meio de tratamento químico do solo com produtos estáveis obtêm-se redução do valor da resistência de aterramento, que dependerá das
características físico-químicas deste solo. De maneira geral se conseguem reduções consideráveis em solos de alta resistividade (neutros) e mínimas em solos de baixa resistividade. Por
outro lado o uso de substâncias químicas no solo, além de não recomendável, com o passar
do tempo pode afetar seriamente o sistema de aterramento.
Princípios Básicos Sobre Transmissão Digital
|
47
4) Aumentar o comprimento da haste de aterramento. Este método é indicado em áreas urbanas, onde a construção de sistemas de aterramento com múltiplas hastes de aterramento
possui preço proibitivo, pois é necessária a destruição da infra-estrutura existente. Por outro
lado o sistema de aterramento com haste profunda necessita de dimensões mínimas de área,
se comparadas ao sistema de aterramento de hastes de aterramento múltiplas. Este método
fornece uma baixa resistência de aterramento para o sistema, pois se consegue alcançar áreas próximas ao lençol freático, onde se obtém índices de umidade constantes, devido a sua
invariabilidade com o tempo. Mesmo em solos com resistência de aterramento superficiais
elevadas é possível se obter uma resistência de aterramento aceitável utilizando-se este método de aterramento.
Ruídos
Definição
Ruídos são quaisquer sinais que ocasionam a redução da inteligibilidade de uma informação
de som, imagem ou dados. Um sinal transmitido poderia ser amplificado por uma cascata
de amplificadores e/ou filtros de alto ganho se não houvesse no canal de transmissão. Neste
caso as informações com energia muito baixa poderiam ser detectadas sem problema. Por
outro lado, existindo ruído no canal de transmissão, quando se amplificamos o sinal transmitido, o ruído é também amplificado. Entretanto, os alguns tipos de ruídos, devido à sua
riqueza espectral, podem ser utilizados como fonte para a síntese da fala, de inúmeros sons
da natureza, e de sons de instrumentos musicais. Além disso, podem ser usados para a calibração de equipamentos eletrônicos, como sinais de teste, e nas medidas das características
de filtros, amplificadores, sistemas de áudio eletroacústicos e outros sistemas.
Os ruídos não possuem uma definição através de expressão matemática baseada no tempo,
não podendo ser preditos no tempo, nem mesmo depois de detectados, exceto em casos
como o ruído de interferência de 60 Hz. Entretanto é possível caracterizá-los no tempo e na
freqüência (Detalhes mais a frente).
A razão entre a potência do sinal desejado e a potência do ruído é denominada de relação
sinal/ruído (SNR), a qual pode ser usada para determinação do nível de influência de um
ruído nos sistemas eletrônicos. Outra forma de se determinar essa influência é através da caracterização de um sistema e não de um sinal (faixa dinâmica - DR), a qual determina a razão
entre o máximo sinal desejado, que o sistema admite, e o mínimo sinal desejado detectável.
Este sinal mínimo detectável é o nível do ruído apresentado, quando não existe sinal. Essas
duas grandezas são geralmente expressas em dB:
( SNR)dB = 20 log SNR
DRdB = 20 log DR
( SNR)dB = 10 log SNR (Potência)
(Tensão)
48
|
Rede de Computadores – Convergência das Redes
Caracterização
¨ No tempo: Através de suas propriedades estatísticas, ou seja, por sua média μ, pelo
seu desvio padrão σ, ou pelo quadrado do desvio padrão σ2 (variância). O desvio
padrão é uma medida do quanto os valores se distanciam da média. Os ruídos se
distribuem ao longo do tempo, segundo uma função chamada Função Densidade
de Probabilidade f(N), no caso de ruído branco e rosa (Detalhes mais a frente).
¨ Através da Função Rx (τ ) denominada função autocorrelação, que é uma medida da
¨ regularidade de uma função, ou seja, é uma medida da similaridade de um sinal e
deste mesmo sinal atrasado no tempo. Esta função autocorrelação, também pode
¨ ser utilizada para proporcionar a diferenciação de uma informação desejada (por
¨ exemplo, som, imagem ou dados) de um ruído. Para exemplificar, informamos, que
¨ a amostra de um sinal de voz ou de imagem é muito correlacionada com uma
amostra anterior. Tendo em vista que esta propriedade não ocorre com os ruídos,
¨ essa característica é geralmente usada para tentar eliminá-los. Informamos, ainda,
¨ que a transformada de Fourier da função autocorrelação é a denominada Função
¨ Densidade Espectral de Potência.
¨ No domínio da freqüência: Através da função Densidade Espectral de Potência
Sx(ω), a qual descreve a distribuição de potência do ruído por unidade de banda
em função da freqüência.
Tipos
Existem diversas maneiras de classificação de tipos de ruídos Consideramos duas formas de
classificação: quanto à sua Densidade Espectral de Potência e quanto à sua origem.
A Tabela 1.4, mostra a classificação dos ruídos, quanto à forma da Densidade Espectral de
Potência, ou seja, de acordo com a distribuição da energia no espectro.
Tabela 1.4 Classificação dos ruídos de acordo com a forma da Densidade Espectral de Potência
Forma da Densidade Es- Denominação
pectral de Potência
Exemplo de ruído
Constante
Ruído branco
Térmico
Proporcional a 1/f
Ruído rosa ou ruído colorido
Flicker
Ruído marrom ou ruído vermelho
Popcorn
Sem denominação
Ruído galáctico
Sem denominação
Ruído atmosférico
Proporcional a 1/f2
Proporcional a 1/f2,7
Forma irregular
A tabela 1.5 mostra a classificação dos ruídos de acordo com a sua origem
Tabela 1.5 Classificação dos ruídos de acordo com a sua origem.
Origem
Denominação
Tipos de sinais
Artificiais
Ruídos de interferência
Aleatórios ou determinísticos
Princípios Básicos Sobre Transmissão Digital
|
49
Ruído galáctico
Naturais
Aleatórios
Ruído atmosférico
Ruídos inerentes a elementos passivos e
ativos
Os ruídos artificiais são provocados de forma involuntária pelo homem, sendo denominados de
ruídos de interferência ou, apenas de interferência, ocorrem devido a uma interação não desejada entre o mundo exterior e os sistemas, como, por exemplo, rede de energia de 60Hz, ondas
eletromagnéticas, comutação de motores, sistemas de ignição, fontes de alimentação comuns
e chaveadas, etc. Esses ruídos podem ser reduzidos a níveis muito baixos através da utilização
de blindagem, filtros supressores, e projeto bem detalhado dos sistemas e componentes utilizados. Denomina-se de Compatibilidade Eletromagnética” (EMC), a área da ciência que estuda
a possibilidade de um sistema eletrônico operar sem erro, em um ambiente eletromagnético,
bem como a possibilidade deste sistema operar como uma fonte de interferência.
Os ruídos naturais são os existentes na natureza, de forma que o homem não é responsável
pela sua existência, como, por exemplo, os ruídos galácticos e atmosféricos, os quais que perturbam, principalmente, os sistemas de transmissão de ondas eletromagnéticas, entrando
nos sistemas através das antenas receptoras.
Os ruídos naturais inerentes (tabela 1.6), também denominados de intrínsecos, devido à sua
aplicação para a medida de sistemas eletroacústicos, estão presentes na maioria dos componentes eletrônicos, passivos e ativos, gerados por elementos de circuito, como, por exemplo,
resistores, diodos, transistores bipolares, transistores de efeito de campo, etc. Estes ruídos
não podem ser completamente eliminados, mas podem ter seus efeitos reduzidos através
de um projeto apropriado dos componentes e dos sistemas, onde se aumenta o máxima
possível a SNRdB.
Tabela 1.6 Ruídos inerentes mais conhecidos
Nome do
ruído
Forma da Densidade Es- Componentes ruidosos
pectral de Potência
Térmico
Constante
Resistores, dispositivos de estado sólido
Shot noise
Constante
Válvulas, dispositivos de estado sólido
Flicker
Aproximadamente 1/f
Dispositivos de estado sólido
Popcorn (Burst)
Geração/
Recombinação
Microplasma
Aproximadamente 1/f2
Aproximadamente 1/f2
Aproximadamente 1/f2
Dispositivos de estado sólido
Dispositivos de estado sólido
Dispositivos de estado sólido
A próxima figura mostra o esquemático de um gerador de ruído branco.
Figura 1.39 Gerador de ruído branco.
50
|
Rede de Computadores – Convergência das Redes
Fontes de sinais para medições de sistemas
Considere uma excitação do tipo x (t ) = X m cos(w0 t + ϕ 0 ) , com amplitude Xm=1 e fase ϕ 0 = 0 . Se
este sinal for aplicado à entrada de um sistema com resposta em freqüência H (w ) = H (w )e jθ (w ) ,
demonstra-se, que mostrado que na saída tem-se: r (t ) = H (ω0 ) cos[ω 0 t + θ (ω0)]
A resposta r(t) também é um sinal sinusoidal, cuja amplitude e fase na freqüência ω0 são a
magnitude e a fase do sistema nesta freqüência. Se forem elaboradas medições com um número suficientemente grande de diferentes freqüências, é possível se determinar, com razoável
precisão, a magnitude e a fase do sistema em uma banda desejada. São utilizados ruídos branco e rosa nas medições das características de sistemas.
A Tabela 1.7 resume as características dos sinais empregados na medição de sistemas. Lembre-se, que o sinal do tipo impulso, cuja transformada de Fourier é igual a 1 em toda a faixa
de freqüência, não é realizável fisicamente.
Tabela 1.7 Características dos sinais empregados nas medidas de sistemas
NOTA:
Na coluna “Forma da função na freqüência”, (•) indica, que a forma de onda mostrada
corresponde à transformada de Fourier da função no tempo, e (••) indica, que a forma
de onda mostrada corresponde à função Densidade Espectral de Potência. O ruído
branco e o ruído rosa não podem ser expressos por uma função no tempo. Portanto,
não possuem transformadas de Fourier.