1
FÍSICA I
2007
Física é uma ciência empírica, a ciência da medida.
“Tenho afirmado frequentemente que, quando se pode medir aquilo de que se está falando e
exprimir essa medida em números, fica-se sabendo algo a seu respeito; mas quando não se pode
exprimí-la em números, o conhecimento é limitado e insatisfatório. Ele pode ser o começo do
conhecimento, mas o pensamento terá avançado muito pouco para o estágio científico, qualquer que
seja o assunto”.(Lorde Kelvin, 1824-1907).
Objetivos da disciplina Física I:
Levar o aluno a realizar e analisar medidas físicas, compreender o movimento e as leis que
regem estes movimentos. Entender a relação entre trabalho e energia na geração de movimento.
Programa da disciplina:
1. Conceitos Básicos: Unidades. Grandezas físicas. Algarismos significativos. Tratamento de erros.
2. Vetores: Adição de vetores. Componentes de vetores. Produto de vetores.
3. Equilíbrio de uma Partícula: Equilíbrio, Primeira e Terceira Leis de Newton. Força de reação normal de uma
superfície. Forças de atrito.
Movimento Retilíneo: Movimento retilíneo e uniforme. Movimento retilíneo uniformemente acelerado.
Segunda Lei de Newton: Aplicações.
Gravitação Universal: Força gravitacional.
Movimento plano: Movimento de um projétil. Componentes da velocidade. Alcance e altura máxima.
Movimento Circular e Uniforme: Período e frequência. Velocidades angular e escalar. Aceleração e força
centrípeta. Acoplamento de polias.
9. Trabalho e Energia: Trabalho realizado por uma força constante ou variável. Trabalho e energia cinética.
Energia potencial gravitacional. Energia potencial elástica. Potência. Conservação da energia mecânica.
10. Impulso e Momento Linear: Relação entre impulso e momento linear. Impulso de força variável.
Conservação do momento linear. Colisões.
4.
5.
6.
7.
8.
Bibliografia mínima:
YOUNG, H.D.; FREEDMAN, R.A. Física. São Paulo: Pearson, 2003, v. 1.
KELLER, F. J.; GETTYS, W. E.; SKOVE, M. J. Física. São Paulo: Makron Books, 1999, v. 1.
NUSSENZVEIG, H. M. Curso de Física Básica. São Paulo: Edgard Blucher, 2002, v. 1
HALLIDAY, D.; RESNICK, R.; WALKER, J. Fundamentos de Física. Rio de Janeiro: Livros
Técnicos e Científicos, 1996. v. 1.
TIPLER, P.A. Física. Rio de Janeiro: Livros Técnicos e Científicos, 1999. v. 1.
HENNIES, C. E.; GUIMARÃES, W.O.N; ROVERSI, J.A. Problemas Experimentais em Física.
Campinas-SP: UNICAMP, 1993. v. 1 e 2.
2
Conceitos Básicos:
Grandeza física – qualquer número ou conjunto de números usados para descrever
quantitativamente um fenômeno físico. Escalar ou vetorial.
Notação científica.
a = b.10n
onde a é um número real qualquer.
b é um número, cujo módulo, é 1 b<10.
n é um número inteiro.
Exemplo: v = 300000 km/s = 3,0.105 km/s.
Sistema de Unidades:
Sistema Internacional de Unidades (SI): kg, metro, segundo.
Conversões de unidades:
Área, volume, etc.
Alguns prefixos utilizado no S.I.:
Fator
Prefixo
Símbolo
10-18
atto
a
10-15
femto
f
10-12
pico
p
10-9
nano
n
-6
10
micro
10-3
mili
m
10-2
centi
c
103
quilo
k
106
mega
M
109
giga
G
12
10
tera
T
1015
peta
P
1018
exa
E
Tratamento adequado dos erros cometidos nos processos de medidas diretas e indiretas.
1. ERROS
As grandezas físicas são obtidos por comparação com um padrão ou pela leitura direta na
escala de um medidor.
O objetivo da medição de uma grandeza física é alcançar o seu valor real. Mas isto é
praticamente impossível. Pode-se chegar, após uma série de medidas, a um valor que mais se
aproxime do real.
Ao se efetuar diversas medidas de uma mesma grandeza, muito provavelmente um operador
não obterá os mesmos valores.
Erro é a diferença entre o valor medido e o valor real da grandeza. Os erros podem ser
sistemáticos ou aleatórios.
2. ERROS SISTEMÁTICOS
São as flutuações nas medidas provenientes de falhas do método empregado ou de defeitos
do operador.
Podemos citar como exemplos a calibração errônea do instrumento, tempo de resposta de um
operador, relógio descalibrado, superestimar ou subestimar os valores das medidas.
Os erros sistemáticos são de amplitude regular e influem na medida sempre num mesmo
sentido, para mais ou para menos.
3. ERROS ALEATÓRIOS
São aqueles cujas causas são acidentais e variáveis. As flutuações podem estar relacionadas
à imperícia do operador, à variação na capacidade de avaliação (número de medidas efetuadas), à
leitura de uma escala, à reflexos variáveis do operador (acionar o cronômetro), etc.
Os erros acidentais podem ocorrer em diversas amplitudes e em qualquer sentido.
3
Aos erros acidentais ou aleatórios são aplicadas a teoria dos erros ou a estatística aplicada
aos erros.
4. ESTATÍSTICA APLICADA AOS ERROS
4.1. VALOR MÉDIO OU MÉDIA ARITMÉTICA
Quando medimos o valor de uma grandeza, podemos realizar apenas uma medida ou várias
medidas, que se distribuem mais ou menos simetricamente em torno de um valor médio (média).
A média é definida como a somatória de todos os valores da medida, dividida pelo número de
medidas.
N
x
x
i
i 1
N
onde:
x = média
xi = valor de cada medida
N = número de medidas
A média aritmética de uma mesma grandeza x é o valor mais provável ou o valor que melhor
representa a grandeza.
4.2. DESVIO
Não pode-se afirmar que o valor mais provável (média) seja o valor real da grandeza.
Assim se pode definir o desvio () como a diferença entre um valor medido (xi) e o adotado
que mais se aproxima do valor real (valor médio de x).
_
= xi x
4.3. DESVIO MÉDIO
É a média aritmética dos valores absolutos dos desvios.
N
onde:
N
x
i 1
N
i
x
i 1
N
= desvio médio
xi = qualquer valor da grandeza x
x = média aritmética
N = número de medidas
4.4. DISPERSÃO
É interessante saber de quanto as medidas individuais xi se afastam, em média, do valor
médio. Ou seja, de que maneira as medidas xi se distribuem em torno do valor médio.
O desvio médio, a variança e o desvio padrão são utilizados para medir a dispersão.
4.5. VARIANÇA (2)
Variança é definida como a média aritmética dos quadrados dos desvios de todos os valores
da grandeza, com relação ao valor médio da população.
N
x x
2
i
2
onde:
i1
N
2 = variança
xi = cada medida realizada
4
x = média aritmética da população
N = número total de xi na população
4.6. DESVIO PADRÃO ()
É simplesmente a raiz quadrada da variança e, portanto, expresso na mesma unidade da
grandeza x medida.
N
_
( x i x )2
i1
N
5. PROPAGAÇÃO DE ERROS
Muitas grandezas físicas são obtidas de maneira indireta.
Para determinar a velocidade média de um objeto, por exemplo, deve-se medir o percurso S
e medir o tempo gasto t.
A velocidade média é obtida, indiretamente, pela divisão:
v
S
t
Se as grandezas S e t são afetadas de desvios, na divisão (S/t) tais desvios se
combinarão e afetarão o valor da velocidade média.
Em outras palavras, tem-se uma propagação de erros, seja a grandeza V a função de outras
grandezas variáveis a, b, c, ..., k.
V = f (a, b, c, ..., k)
O desvio padrão v resultante que afeta V pode ser calculado para as diversas formas da
função:
5.1. SOMA OU DIFERENÇA
_
_
_
V a b
v ( a b )
5.2. PRODUTO
_
_ _ _
V a.b.c
v
V
a
a
2
b
b
2
c
c2
5.3. QUOCIENTE
_
_
V
a
_
b
v
V
a
2
a2
b
2
b2
5
6. ALGARISMOS SIGNIFICATIVOS
Ao tomarmos uma régua e efetuarmos a medida do comprimento de um lápis, obtemos, por
exemplo, o valor de 12,75 cm. Sabemos com certeza que o lápis possui os 12,7 cm, mas não
podemos dizer com certeza o quão exatos são os 0,5 mm. Isso ocorre porque o instrumento (régua)
nos fornece a precisão apenas dos milímetros.
Aos dígitos que conhecemos com certeza e ao primeiro duvidoso chamamos de “algarismos
significativos”.
No exemplo acima, temos o comprimento do lápis dado com 4 algarismos significativos.
L = 1 2 , 7 5 cm
exatos duvidoso
Observações:
a. Os algarismos significativos independem da posição da vírgula.
b. É comum, ao trabalharmos com algarismos significativos, termos de recorrer ao
arredondamento. Ele é efetuado da seguinte forma: se o último algarismo for menor que
cinco, ele é simplesmente desprezado; se for maior ou igual a cinco, o algarismo precedente
é acrescido de uma unidade.
Exemplos: 1, 432 1,43
2,475 2,48
Exemplos de aplicação do tratamento dos erros cometidos nos processos de medidas:
1. Foram realizadas 5 medidas do comprimento de uma barra, cujos valores estão na tabela.
Determine o valor médio do comprimento da barra e o seu desvio padrão.
comprimento L (mm)
medida 1
105,55
medida 2
104,95
medida 3
106,05
medida 4
105,00
medida 5
104,85
2. Para se determinar o volume de um cubo, foram realizadas 5 medidas do comprimento em cada
um de seus lados. Os valores obtidos estão apresentados na tabela abaixo. Determine o valor
médio do volume deste cubo e o seu respectivo desvio padrão.
lado 1 (L1) (mm) lado 2 (L2) (mm) lado 3 (L3) (mm)
medida 1
10,50
10,60
10,60
medida 2
10,50
10,50
10,55
medida 3
10,45
10,40
10,45
medida 4
10,60
10,55
10,40
medida 5
10,40
10,50
10,50
6
Grandezas escalar e vetorial
Grandeza escalar: é completamente descrita por um número e uma unidade.
Exemplos: temperatura, massa, densidade, etc.
Grandeza vetorial: possuem uma qualidade direcional, que não podem ser descritas apenas por
um número. É preciso conhecer, também, a direção e o sentido de atuação.
Exemplos: velocidade, força, aceleração, etc.
Vetor
Símbolo matemático utilizado para descrever a intensidade (ou módulo; se os vetores
estiverem representados em escala), direção e sentido de umagrandeza física vetorial. O vetor pode
ser representado por uma letra com uma seta em cima ( F ) ou por uma letra em negrito (F;
geralmente utilizado nos textos de livros)
150 km
150 km
Limeira
São Paulo
A
Limeira
B
São Paulo
A é o vetor deslocamento de um veículo que saiu de Limeira e foi para São Paulo.
B é o vetor deslocamento de um veículo que saiu
de São Paulo e veio para Limeira.
Os módulos (ou intensidades) dos vetores A e B são:
Módulo do A = A = A = 150 km
Módulo do B = B = B = 150 km
Portanto, A = B = 150 km ou, simplesmente, A = B = 150 km
Como os dois vetores possuem a mesma direção, porém sentidos opostos, temos:
B = -A
(vetores opostos)
Adição de vetores
B
A
D
C AB
E
U
F D E
W U V
V
(b)
(c)
(a)
onde: C , F e W são os vetores resultantes das somas dos seus respectivos vetores (soma
vetorial, ou seja, a direção e sentido do vetor tem que ser levado em conta).
Os módulos dos vetores resultantes, nos exemplos, são calculados das seguintes maneiras:
(a)
A
B
C AB
C AB
A
B
C A2 B2 2 A Bcos
7
F DE
(b)
W U2 V 2
(c)
Decomposição de um vetor: componentes ortogonais (perpendiculares).
O vetor A da figura abaixo pode ser representado por suas componentes nas direções X e Y.
Y
Y
Y
Ay
A
Ay
A
Ax
X
sen
Ay
cos
Ax
Ax A cos
A
A
Ay A sen
Ax
X
Cálculo do ângulo : tg
Ay
Ax
arc tg
X
Ay
Ax
Ax e Ay são as componentes ortogonais do vetor A .
Exemplos:
1. Um vetor de módulo A=5 m forma um ângulo de 30o com o eixo X positivo. Determine suas
componentes ortogonais.
2. Dada as três forças posicionadas conforme a figura, determine a força resultante e a sua posição.
3. Determine o vetor resultante entre dois vetores perpendiculares de módulos Ax= 10 e By= 15.
Determine, também, a posição da resultante.
4. Determine o vetor resultante entre dois vetores, de módulos 12 m e 20 m, que formam um ângulo
de 30o entre si.
8
Equilíbrio de uma partícula
Força é uma grandeza física vetorial que pode provocar deformação ou variação no estado de
movimento, quando aplicada em um determinado corpo. As forças podem ser de contato ou de
campo.
Dizemos que um corpo está em equilíbrio quando a resultante da soma vetorial de todas as
forças aplicadas neste corpo é nula:
Equilíbrio estático: o corpo está em repouso.
Equilíbrio dinâmico: o corpo está em movimento retilíneo e uniforme (MRU).
Primeira Lei de Newton (Princípio da Inércia): todo corpo tende a continuar em MRU ou em
repouso, a menos que uma força passe a atuar sobre ele.
Terceira Lei de Newton (Princípio da Ação e Reação): para toda força de ação existe sempre
uma força de reação de mesma intensidade e direção, em sentido contrário, porém, atuando em
corpos diferentes. Esta Lei descreve uma importante propriedade das forças, a de sempre
aparecerem aos pares.
Força de reação normal de uma superfície
Quando um objeto está apoiado sobre uma superfície, ele exerce uma força sobre esta
superfície, devido à atração gravitacional. A superfície reage aplicando uma força sobre o objeto.
Esta força recebe o nome de força de reação normal da superfície ou simplesmente força normal
(normal, porque é sempre perpendicular à superfície).
9
Força de atrito
Sempre que um objeto movimenta-se sobre uma superfície, aparece uma força chamada de
força de atrito, paralela às superfícies, e em sentido oposto ao do movimento do objeto. A força
de atrito pode atuar mesmo quando não há movimento do objeto em relação à superfície. Por
exemplo, quando uma pessoa puxa um guarda-roupa com uma determinada força e ele não sai
do lugar (continua em repouso), significa que a força aplicada é equilibrada pela força de atrito,
entre o guarda-roupa e a superfície, que atua em sentido oposto. Quando a força aplicada for
maior do que a força de atrito estático máximo, o guarda-roupa entrará em movimento.
A força de atrito estático máximo (FE máx ) é calculada como:
FE máx = µE N
Quando o objeto já se encontra em movimento, passa a atuar a força de atrito cinético (F C ) dada
por:
FC = µC N
onde: µE, µC = coeficientes de atrito estático e cinético, respectivamente, para as duas superfícies
que estão em contato; é um número entre 0 e 1, adimensional (sem unidade). µE > µC.
N = força normal à superfície.
FE1 = F1 < FE máx
Parado
FE2 = F2 = FE máx
Prestes a se mover
F3 FC = µC N
Em movimento
Exemplos
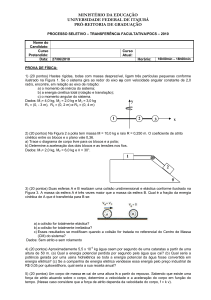
1. Um bloco, cujo peso é 500 N, está pendurado por cordas fixas no teto e na parede. Determine as
tensões nas três cordas, supondo que o peso de cada uma delas seja desprezível.
2. O bloco A, de peso 500 N, repousa sobre um plano inclinado de 30o, sem atrito. O centro de
gravidade do corpo está no centro. Uma corda flexível é presa ao centro da face direita do corpo,
passa por uma roldana sem atrito e é ligada a um segundo bloco B. Supondo desprezíveis o
peso da corda e o atrito na roldana, determine o peso do bloco B para que o sistema esteja em
10
equilíbrio, isto é, para que permaneça em repouso ou se mova com velocidade constante, em
qualquer sentido.
3. Um bloco de 100 N está sobre uma superfície horizontal. A força, paralela à superfície, aplicada
neste bloco, pode ser aumentada até 40 N antes dele começar a se mover. Uma força de 20 N
manterá o bloco em movimento a uma velocidade constante. Determine os coeficientes de atrito
estático e cinético.
4. Um plano inclinado tem seu ângulo ajustado de tal maneira que um bloco colocado em sua
superfície escorrega para baixo com velocidade constante. Calcular o ângulo .
5. Na figura a seguir tem-se um sistema de polias, fixa e móveis. Que força F deve ser aplicada
para equilibrar o objeto de peso 200 N?
11
Cinemática
Parte da mecânica que estuda o movimento sem analisar o agente que provoca este movimento.
Considera o conceito de ponto material, ou seja, os corpos podem ser considerados pontos se
deslocando.
Movimento Retilíneo e Uniforme (MRU)
Velocidade média:
v
x2 x1 x
t 2 t1 t
No S.I., x é dado em
metros (m); t em segundos
(s) e, portanto, v em metros
por segundo (m/s).
Fazendo: t1 = 0 ; t2 = t
x1 = xo ; x2 = x
e substituindo na equação
v
x xo
x2 x1
, obtemos: v
t
t 2 t1
x - xo = v t
x = xo + v t
Equação Horária das Posições para o
MRU
Velocidade Instantânea
v lim
t 0
x dx
t dt
Gráfico da Posição em função do Tempo (X x t) para o MRU.
v
x2 x1 x
t 2 t1 t
12
Movimento Retilíneo Uniformemente Acelerado (MRUA)
Aceleração Média
a
v 2 v 1 v
t 2 t1 t
No S.I., a aceleração é dada
em metros por segundo em
cada segundo (m/s2)
Fazendo: t1 = 0 ; t2 = t
v1 = vo ; v2 = v
e substituindo na equação
a
v 2 v1
v vo
, obtemos: a
t 2 t1
t
v = vo + a t
v - vo = a t
Equação Horária das Velocidades
para o MRUA
Aceleração Instantânea.
a lim
t 0
v dv
t dt
Gráfico da Velocidade em função do Tempo (v x t) para o MRUA.
a
v 2 v 1 v
t 2 t1 t
x Área A
( v vo )t
2
( v vo )t
Como x Área A
2
13
e v = vo + a t, temos:
2
2
at 2
v at v o v o t at v o t 2 v o t at
x xo o
vo t
t
2
2
2
2
2
x xo v o t
at 2
2
Equação Horária das Posições para o MRUA
Gráficos da Posição em função do Tempo (X x t) para o MRUA.
Equação de Torricelli
v vo
at 2
e
, temos:
x xo v o t
a
2
2
2
a
v o v v o2 v 2 v v o v o2
v vo a v vo vo v vo
2
2
x xo v o
2 v 2v v o v o
a
a 2a
a
a 2a a 2a
a 2 a
Como v = vo + a t
v o2 v 2
x xo
2a 2 a
t
2 a ( x xo ) v o2 v 2
v 2 v o2 2 a x Equação de Torricelli
Movimento Vertical
No movimento vertical os corpos estão sob a ação de um aceleração constante, para um
determinado local, que é a aceleração da gravidade (g 9,8 m/s2 ).
Dependendo do problema, pode-se adotar os seguintes sentidos para o eixo vertical (y):
y yo vo t
g t2
2
y yo vo t
v vo g t
v 2 v o2 2 g y
g t2
2
v vo g t
ou
v 2 v o2 2 g y
14
Exemplos:
1. Um veículo, movendo-se com velocidade uniforme em uma estrada retilínea, passa pelo marco
quilométrico 50 km às 10 h e, 30 minutos depois, passa pelo marco 100 km. Determine a
equação horária deste movimento e em que posição estará às 12 h.
2. Determine a equação que descreve o movimento representado na figura a seguir.
3. Um carro acelera, a partir do repouso, a uma taxa constante de 8 m/s2. (a) Qual a sua velocidade
depois de 10 s?; (b) Que distância ele percorre nestes 10 s?
4. Determine as equações horárias das posições e das velocidades para o movimento de um
veículo descrito pelo gráfico a seguir, sabendo-se que ele partiu da posição 50 m.
5. Um corpo cai livremente desde o repouso. Calcular:
a) A aceleração.
b) A distância percorrida em 3 s.
c) A velocidade depois de haver percorrido 100 m.
d) O tempo necessário para alcançar uma velocidade de 25 m/s.
e) O tempo necessário para percorrer 300 m.
6. Uma pedra é atirada verticalmente para cima, com uma velocidade de 20 m/s. (a) Determine a
altura máxima atingida pela pedra; (b) Se a pedra foi apanhada em seu caminho de volta, em um
ponto a 5 metros de altura de onde foi lançada, qual a sua velocidade neste momento?; (c)
Quanto tempo durou todo o percurso?
15
Segunda Lei de Newton
Massa: quantidade de matéria de um objeto; propriedade de um objeto que mede sua resistência
à aceleração, ou seja, está relacionada com a inércia: quanto maior a massa, maior é a
dificuldade de acelerar (ou desacelerar) o objeto.
Se, no corpo acima, forem aplicadas forças de intensidades diferentes, serão obtidas
acelerações também diferentes, de tal modo que:
F1 F2 F3
. . . . . . . cons tan te massa (m)
a1 a 2 a 3
Com isto podemos escrever a seguinte equação:
FR = m a
(Segunda Lei de Newton)
onde: FR = resultante das forças que atuam no corpo.
m = massa do corpo.
a = aceleração adquirida pelo corpo.
As unidades de força, massa e aceleração, em quatro sistemas diferentes, estão na tabela
seguinte:
Sistema de Unidades
S.I. (MKS)
CGS
Técnico
Técnico inglês
Força
newton (N)
dina (din)
quilograma-força (kgf)
libra (lb)
Massa
quilograma (kg)
grama (g)
unidade técnica de massa (utm)
slug
Aceleração
m/s2
cm/s2
m/s2
ft/s2
1 newton é a força que produz, em um corpo de 1 kg, uma aceleração de 1 m/s2.
Relações entre as unidades:
1 N = 0,225 lb = 105 din
1 kgf = 9,8 N
1 utm = 9,8 kg
1 slug 14,6 kg
1 ft (pé) = 30,48 cm
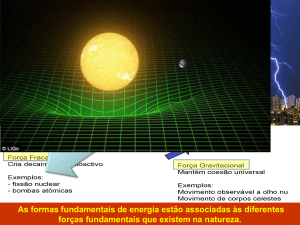
Lei da Gravitação Universal
Os corpos se atraem com uma força, chamada força gravitacional (Fg), de acordo com a
equação:
Fg
G m1 m2
r2
onde: G = 6,67.10-11 N m2/kg2
m1, m2 = massa dos corpos que estão interagindo.
r = distância entre os corpos.
16
Se a Terra for considerada uma esfera homogênea, a força exercida pela Terra sobre um
corpo de massa m, seria:
Fg
G m mT
r2
onde: mT = massa da Terra = 5,98.1024 kg
Peso de um corpo: É a força com que a Terra atrai todos os corpos localizados na superfície ou
próximo à superfície.
P Fg
G m mT
R2
onde: m = massa do corpo.
P = peso do corpo de massa m.
R = raio médio da Terra = 6,37.106 m.
Considerando a Segunda Lei de Newton e sabendo-se que um corpo estará com uma
aceleração constante, que é a aceleração da gravidade (g), temos a expressão para o peso:
P=mg
onde g = 9,8 m/s2.
Assim, a aceleração da gravidade pode ser expressa, também, por:
g
G mT
R2
Força Elástica - Lei de Hooke
Quando uma mola (ou fita elástica) é alongada (esticada), aplicando-se uma certa força, o
alongamento produzido é proporcional à força aplicada:
F=kx
onde: F = força aplicada (N).
x = alongamento sofrido pela mola (m).
k = constante elástica da mola (N/m). Unidades no S.I.
Do gráfico da força (F) em função do alongamento (x) podemos obter a constante elástica da
mola:
k
F
x
17
Exemplos:
1. Uma força resultante horizontal de 30 N atua em um corpo que inicialmente se encontra em
repouso sobre uma superfície lisa e horizontal. Após 2 s, sua velocidade é 30 m/s. Calcule a
massa do corpo.
2. Dois carrinhos são unidos por um fio e puxados por uma força de 30 N, conforme a figura. Sendo
as massas dos carrinhos iguais a mA = 5 kg e mB = 10 kg e desprezando os atritos e o peso dos
fios, determine:
a) A aceleração do conjunto.
b) A força de tração no fio que une os dois carrinhos.
3. A constante de gravitação universal vale 6,67.10-11 N m2/kg2. Supondo-se que a Terra seja uma
esfera homogênea de raio 6370 km e massa 5,98.1024 kg, calcular: (a) a aceleração da gravidade
na superfície da Terra; (b) o peso de uma nave de 120 toneladas que esteja a 250 km de
altitude.
4. Uma mola de automóvel é comprimida 15 mm em virtude da aplicação de uma força de módulo
450 N. (a) Determine a constante da mola; (b) Qual é a compressão no caso de uma força de
módulo 2250 N?
5. Uma mola é submetida à ação de uma força de tração. O gráfico da figura indica o módulo da
força tensora F em função da deformação x. Determine: (a) a constante elástica da mola; (b) a
deformação na mola quando F=270 N.
18
Movimento Plano - Movimento em duas dimensões
Movimento de um projétil
Um projétil é qualquer objeto que, recebendo uma velocidade inicial, segue uma trajetória
determinada pela ação de força gravitacional e pela força de resistência do ar. Como a força de
resistência do ar depende da velocidade e da geometria do objeto, seu estudo é complexo e não
será abordado. Os estudos serão realizados sem levar em consideração a resistência do ar.
Exemplos de movimento de projétil: bala disparada de um revólver, bomba lançada de um
avião, bola de tênis depois de rebatida pelo jogador, etc...
Seja um corpo posicionado na origem, sendo lançado com velocidade inicial vo, sob um
ângulo o formado com o eixo horizontal. O vetor velocidade v é representado em algumas posições
da trajetória parabólica, conforme mostra a figura a seguir.
onde:
vo = velocidade inicial de lançamento do projétil.
vox , voy = componentes da velocidade inicial nas direções x e y, respectivamente.
o = ângulo de lançamento.
v = velocidade num instante de tempo qualquer.
vx , vy = componentes da velocidade v nas direções x e y, respectivamente.(vx = vox).
= direção da velocidade num instante de tempo qualquer.
R = alcance horizontal, ou seja, distância máxima alcançada pelo projétil na direção x.
hmáx = altura máxima alcançada pelo projétil.
Na direção x o movimento é uniforme e na direção y o movimento é uniformemente variado,
sujeito à aceleração gravitacional g.
19
Utilizando a decomposição de vetores aplicada nas condições iniciais do lançamento do
projétil, temos, da figura a seguir:
vx = vox = vo cos o
voy = vo sen o
O movimento em x e y é dado pelas equações:
x = xo + vx t
2
y = yo + voy t + a t
2
vy = voy + a t
vy2 = voy2 + 2 a y
Substituindo as componentes da velocidade inicial nas equações acima e sabendo que a
aceleração na direção y é a gravitacional g, temos:
x = xo + (vo cos o) t
2
y = yo + (vo sen o) t - g t
2
vy = vo sen o - g t
vy2 = voy2 - 2 g y
A distância do projétil até a origem (r), em qualquer instante de tempo, é dada por:
r2 = x2 + y2
r x 2 y 2
20
O módulo da velocidade v do projétil, em qualquer instante, é dado por:
Como vox = vx , temos:
v2 = vx2 + vy2
v v 2x v 2y
A direção do vetor velocidade v é obtida aplicando-se a tangente no triângulo retângulo da
figura anterior, obtendo-se:
tg
vy
vx
arc tg (
vy
vx
)
O alcance máximo, para uma determinada velocidade inicial vo, são iguais para ângulos de
lançamento complementares, como mostra a figura a seguir.
Exemplos:
1. Um projétil foi lançado com velocidade de 49 m/s sob um ângulo de 53o com a horizontal.
(a) determine o instante em que o projétil atinge o ponto mais alto da trajetória e a altura deste
ponto; (b) determine o alcance horizontal.
2. Para um projétil lançado com velocidade vo e ângulo de lançamento o, mostre que:
(a) O tempo de subida é dado pela expressão: t
v o sen o
g
v o2 sen 2 o
(b) A altura máxima é dada por: hmáx
2g
v 2 sen 2 o
(c) O alcance máximo horizontal é dado por: R o
g
21
Movimento Circular e Uniforme (MCU)
o = posição angular inicial, em radianos.
= posição angular final, em radianos.
= deslocamento angular, em radianos.
s = deslocamento sobre a circunferência, no
S.I., em metros.
R = raio da circunferência, no S. I., em
metros (m).
S R
Período (T): tempo necessário para um objeto realizar uma volta completa, no S.I., em segundos
(s).
Frequência (f): número de voltas (ou ciclos) que um corpo efetua numa unidade de tempo, no
S.I., em rotações por segundo (rps) = hertz (Hz).
f
t
1
f
w
2
2f
T
Velocidade média (V). No S.I., em m/s.
V
T
ou
Velocidade angular média (w). No S.I., em radianos por segundo (rad/s):
w
1
T
S
t
V
2 R
wR
T
Aceleração centrípeta (ac). É uma aceleração com o sentido para o centro da circunferência.
Como é MCU, esta aceleração produz somente mudança de direção e sentido do objeto. No S.I.,
em m/s2.
ac
V2
w2 R
R
22
Acoplamento de polias:
Acoplamento por correia:
VA = velocidade de um ponto periférico da
polia A.
VB = velocidade de um ponto periférico da
polia B.
Supondo que a correia não escorregue
nas polias, a velocidade da correia é a
mesma dos pontos periféricos A e B. Isto
é:
VA = VB
Acoplamento com mesmo eixo:
Para um mesmo intervalo de tempo, os
pontos periféricos A e B, descrevem um
mesmo ângulo, ou seja, as velocidades
angulares dos pontos A e B são iguais:
wA = wB
Força centrípeta (Fc). É a força que aponta para o centro da circunferência, produzindo a
mudança de direção e sentido do objeto. No S.I., em newton (N).
Fc m a c m
V2
m w 2 R
R
Movimento Circular Vertical
A figura a seguir representa um corpo preso a uma corda de comprimento R, que gira em um
círculo vertical em torno de um ponto fixo O, ao qual a outra extremidade é fixada. O movimento,
embora circular, não é uniforme, pois o corpo é acelerado na descida e desacelerado na subida.
23
Na direção tangente à trajetória circular temos:
FR = m aT
( aT = aceleração tangencial = aceleração que produz variação na
velocidade v)
Py = m aT
m g sen = m aT
aT = g sen
Na direção radial temos:
FR = m ac
T Py ma c
T m
V2
m g cos
R
V2
T m g cos m
R
V2
T m
g cos
R
No ponto mais baixo da trajetória = 0o, sen = 0 e cos = 1. Então, nesse ponto, a aceleração
tangencial aT é nula. A tração na corda é, então
V2
T m
g
R
No ponto mais elevado, = 180o, sen = 0, cos = -1. A tração é, então
V2
T m
g
R
Em movimento deste tipo, existe uma determinada velocidade crítica Vc, no ponto mais alto da
circunferência, abaixo da qual a corda fica frouxa. Para determinar esta velocidade, toma-se T = 0 na
equação anterior,
V2
0 m c g
R
Vc2 R g
Vc
Rg
Exemplos:
1. Duas polias, A e B, de raios RA = 30 cm e RB = 5 cm giram acopladas por meio de uma correia. A
polia A efetua 10 rpm (rotações por minuto). Determine: (a) a frequência da polia B; (b) a
velocidade da correia.
2. Duas polias, A e B, giram coaxialmente (no mesmo eixo). Sabendo que a polia A tem raio 10 cm
e que as velocidades periféricas das polias A e B são, respectivamente, VA = 8 cm/s e VB = 24
cm/s, determine o raio da polia B.
3. Determine a velocidade mínima que um trenzinho de montanha russa deve ter ao atingir o ponto
mais alto de um "loopping", de raio 5 m, para que ele não perca contato com os trilhos.
24
Trabalho e Energia
Trabalho e energia estão entre os conceitos mais importantes da física e tem importante
papel na nossa vida diária. Em física, trabalho tem uma definição precisa, diferente da que tem no
uso cotidiano. Só há trabalho feito por uma força sobre um corpo quando o ponto de aplicação da
força desloca-se uma certa distância e há uma componente da força ao longo da trajetória do
movimento. Assim, quando você puxa um carrinho e o arrasta sobre uma estrada, você efetua um
trabalho sobre o carrinho. No entanto, se o carrinho estiver imobilizado (por exemplo, por estar
amarrado a uma árvore) e você exercer sobre ele a mesma força, não haverá trabalho sobre ele,
pois o ponto de aplicação da força não se desloca.
Ao conceito de trabalho está estreitamente associado o de energia, que é a capacidade de
um sistema realizar trabalho. Quando um sistema faz um trabalho sobre outro, há transferência de
energia entre os dois sistemas. Por exemplo, quando você puxa um carrinho, o trabalho feito
transfere-se em parte na energia de movimento do carrinho, denominada a energia cinética, e em
parte em energia térmica que aparece em virtude do atrito entre o carrinho e a estrada. Ao mesmo
tempo, a energia química do seu organismo diminui à medida que você reboca o carrinho. O
resultado líquido é o da transferência da energia química interna do organismo à energia cinética do
carrinho e à energia térmica. Um dos princípios mais importantes da ciência é o da conservação da
energia: a quantidade de energia total de um sistema, mais a das suas vizinhanças, não se altera.
Quando a energia de um sistema diminui, há sempre o aumento correspondente da energia das
vizinhanças, ou de um outro sistema.
Há muitas formas de energia. A energia cinética está associada ao movimento de um corpo.
A energia potencial é a energia armazenada num sistema e associada à configuração do sistema,
como por exemplo, a distância entre um corpo e a terra. A energia térmica está associada ao
movimento das moléculas de um sistema e está intimamente conectada à temperatura do sistema.
Embora calculado a partir de duas grandezas vetoriais, o trabalho é uma grandeza escalar.
Entretanto, trabalho é uma grandeza algébrica, que pode ser positiva ou negativa. Quando a
componente da força tiver a mesma direção que o deslocamento, o trabalho será positivo. Se oposto,
o trabalho será negativo. Se a força for perpendicular ao deslocamento, ela não terá componente na
direção do movimento e o trabalho será nulo.
Desta forma, quando um corpo é levantado por uma força, o trabalho desta é positivo; quando
uma mola é distendida, o trabalho da força de distensão é positivo; quando um gás é comprimido
num cilindro, novamente o trabalho da força de compressão é positivo. Por outro lado, o trabalho da
força gravitacional sobre um corpo que está sendo levantado, é negativo, pois a força gravitacional
(dirigida para baixo) é oposta ao deslocamento (dirigido para cima). Quando um corpo desliza sobre
uma superfície fixa, o trabalho da força de atrito exercida sobre o corpo é negativo, porque esta força
é sempre oposta ao deslocamento do corpo. Assim, embora possa ser considerado "um trabalho
pesado" sustentar um objeto pesado com os braços estendidos, nenhum trabalho será realizado, no
sentido técnico, porque não há movimento. Mesmo que uma pessoa ande sobre uma superfície
plana carregando o objeto, nenhum trabalho é realizado, porque a força de suporte (vertical) não tem
componente na direção do movimento (horizontal). Do mesmo modo, o trabalho da força normal
exercida num corpo por uma superfície sobre a qual ele se move, bem como o trabalho da força
centrípeta sobre um corpo que se move em círculo, são nulos.
A unidade de trabalho e energia é a unidade de força multiplicada pela de distância.
No sistema internacional (S.I.), é dado por:
No sistema CGS, é dado por:
newton . metro = joule
1 N.m = 1 J
dina . centímetro = erg
1 din.cm = 1 erg
Fator de conversão entre joule (J) e erg:
1 J = 107 erg
25
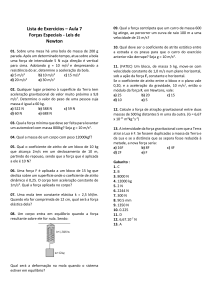
Trabalho realizado por uma força constante
Um objeto sofre um deslocamento d, puxado por uma força F constante que forma um ângulo
com o plano horizontal, conforme mostrado na figura.
Neste deslocamento, a força F realiza um trabalho W que é dado pela força na direção do
deslocamento multiplicada por este deslocamento:
W FX d F cos d
W F d cos
Trabalho realizado por uma força variável
Se, na figura anterior, a força F não for constante e variar ao longo do deslocamento d, o
trabalho realizado pela força F não pode ser calculado pela equação anterior. O trabalho será
dado pela área da figura, como mostra o gráfico abaixo.
Um exemplo de força variável é a força elástica, pois a força F necessária para esticar a mola
é proporcional à sua deformação x, ou seja, esta força varia linearmente com a deformação.
F=kx
Esta equação pode ser representada graficamente, conforme a figura abaixo.
26
Como o trabalho realizado por uma força variável pode ser calculado pela área do gráfico,
temos:
W = Área do triângulo =
Base x Altura
Força x Deformação
2
2
como a força F = k x, temos:
W
kxx
2
W
k x2
2
(trabalho realizado por uma força elástica)
Trabalho e energia cinética
Suponha que a velocidade de um corpo variou, uniformemente, de vo a v, ao deslocar-se por
uma distância d. Então, temos:
v 2 v o2 2 ad
v 2 v o2 2 ad
2 a d v 2 v o2
v 2 v o2
ad
2
multiplicando os dois lados da equação pela massa m do corpo, temos:
m a d m (
v 2 v o2
)
2
Da Segunda Lei de Newton temos que F = m a, então:
m v 2 m v o2
F d
2
2
Da definição de trabalho, W = F d, assim:
W
m v 2 m v o2
2
2
(Trabalho da força resultante que atua em um
corpo)
m v2
o termo
é chamado de Energia Cinética, ou seja, a energia associada ao corpo, devido à sua
2
velocidade. Assim, temos:
m v o2
= energia cinética do corpo no início do deslocamento.
2
m v2
= energia cinética do corpo no final do deslocamento d.
Ec
2
Ec o
Desta maneira, a equação pode ser expressa da seguinte forma:
W Ec Ec o Ec
Energia Potencial Gravitacional
Quando uma força gravitacional (peso) atua sobre um corpo que se desloca verticalmente, a
força realiza trabalho sobre o corpo e é dado pela expressão:
Wpeso = - m g (y2 - y1)
27
Se o corpo sobe, o trabalho realizado pela força peso é negativo, pois a força atua em
sentido oposto ao deslocamento. Se o corpo desce, o trabalho realizado pela força peso é
positivo.
O trabalho realizado para deslocar o corpo da posição y1 para a y2 fica armazenado sob a
forma de energia potencial. Assim, a energia potencial gravitacional (EP) que um corpo possui, a uma
certa altura y acima do nível de referência, é dada pela equação:
EP = mgy
Energia Potencial Elástica
Como visto anteriormente, o trabalho realizado pela força elástica para produzir uma
deformação x na mola é dado por:
W
k x2
2
Assim, a energia gasta para colocar a mola sob esta deformação é armazenada sob a forma
de energia potencial elástica (EP):
k x2
EP
2
Potência
Em física, a potência relaciona o trabalho com o tempo gasto para ser realizado, ou seja, mede
"a rapidez com que o trabalho é realizado". Em uma máquina, o trabalho, em geral, é executado a
uma taxa constante, de modo que a máquina é caracterizada convenientemente pela sua potência.
Define-se potência média PM para um intervalo t, durante o qual se realizou o trabalho W,
como:
PM
W
t
No S.I. a unidade de trabalho (W) é o joule (J) e a unidade de tempo (t) é o segundo(s), assim,
a unidade de potência, no S.I., é J/s, chamado de watt (W).
Na prática, outras unidades de potência também são utilizadas:
1 hp (horse power) = 746 W
1 cv (cavalo-vapor) = 735,5 W
Uma outra expressão para a potência em termos da força que realiza o trabalho e da velocidade
do objeto, pode ser obtida. Suponhamos que, durante um intervalo de tempo t, uma força F atue
sobre um objeto, na mesma direção do movimento, produzindo um deslocamento d. Como W = F.d,
a potência média pode ser dada por:
28
Fd
d
PM
F
t
t
PM F v
ou seja, a potência média também pode ser dada em função da força que atua no objeto e da
velocidade produzida.
A partir da definição de potência média, temos a expressão para a energia gasta durante a
realização de um trabalho:
W PM t
Se a potência for dada na unidade quilowatt (kW) e o tempo em hora (h), uma outra unidade para
energia é obtida: o quilowatt-hora (kWh). Unidade esta muito utilizada no cotidiano, em aparelhos
domésticos, na conta da energia elétrica, etc.
Conservação da Energia Mecânica
Forças Conservativas: "Uma força é conservativa se não realiza nenhum trabalho resultante
sobre um objeto em um percurso de ida e volta".
Um exemplo de força conservativa é a força gravitacional. Quando um objeto se move para cima,
a força gravitacional realiza um trabalho negativo (o deslocamento é oposto à força). Quando o
objeto volta para baixo, até o seu ponto de partida, a força gravitacional realiza um trabalho positivo,
resultando num trabalho nulo, no percurso ida e volta.
Forças Não-Conservativas: "Num percurso de ida e volta, o trabalho resultante é diferente de
zero".
A força de atrito cinética é um exemplo de força não-conservativa, pois ela atua sempre em
sentido oposto ao deslocamento, resultando num trabalho negativo, no percurso de ida e volta.
Sistemas Conservativos e Energia Mecânica
"Um sistema conservativo é um sistema em que somente forças conservativas realizam trabalho
sobre o objeto".
Um sistema inclui o objeto em estudo e as partes de sua vizinhança que interagem com ele. No
caso
de um carro descendo uma rampa, o sistema inclui o carro, a rampa e a Terra ( que interage
com o
carro através da força gravitacional). Se o carro se move rapidamente, a resistência do ar pode ser
significativa, e o ar envolvente também faz parte do sistema.
Um carro que se move lentamente com eixos bem lubrificados é, com boa aproximação, um
sistema conservativo. Neste caso, a resistência do ar e o atrito nos eixos são desprezíveis.
Outro exemplo de sistema conservativo é uma bola em queda livre vertical. Desprezamos a
resistência do ar, de modo que apenas a força gravitacional (conservativa) exercida pela Terra
realiza trabalho sobre a bola. Como já visto, o trabalho da força peso, que é a força resultante, é
dado por:
Wres = - m g (yf - yi )
(1)
Da equação do trabalho e energia cinética, temos:
Wres
m v 2f m v i2
2
2
(2)
igualando as equações (1) e (2), temos:
m v 2f m v i2
m g (y f y i )
2
2
m v 2f m v i2
m g y f m g yi
2
2
29
2
f
2
i
mv
mv
m g yf
m g yi
2
2
ECf + EPf
= ECi + EPi
À soma da energia cinética com a energia potencial dá-se o nome de Energia Mecânica (EM).
Assim, temos a equação da conservação da Energia Mecânica:
EMf = EMi
m v 2f
onde: E Mf
m g yf
2
e
m v i2
E Mi
m g yi
2
Esta equação mostra que a energia mecânica de um corpo mantém-se constante ao longo do
seu deslocamento, ou seja, a energia mecânica inicial é igual à energia mecânica final quando sobre
este corpo atuar somente forças conservativas. As energias potencial e cinética variam ao longo do
movimento, mas a soma destas duas parcelas não varia.
Exemplos:
1. Um corpo é arrastado, horizontalmente, por uma distância de 3 m, sob ação de uma força de 100
N, formando um ângulo de 40o com a direção do movimento. Determine o trabalho realizado pela
força neste deslocamento.
2. Uma pessoa puxou uma caixa por uma distância de 3 m, aplicando uma força que variou
conforme mostra o gráfico. Calcule o trabalho realizado pela pessoa.
3. Um motor de popa de 80 cv movimenta um barco com velocidade de 11 m/s. Qual a força
exercida sobre o barco pelo motor ?
4. Uma lâmpada de 100 W permanece ligada durante 4 horas por dia. Se a companhia de
eletricidade cobra R$0,26 por kWh, qual é o custo do funcionamento desta lâmpada no período
de 30 dias ?
5. Uma criança de 32 kg desce desde o topo de um tobogã aquático, localizado a 8,5 m acima da
superfície da piscina. Qual é a velocidade da criança quando ela atinge a piscina, supondo que o
deslizamento seja sem atrito ?
30
Impulso e Momento Linear
Relação entre Impulso e Momento Linear
Considere uma partícula de massa m movendo-se em linha reta. Supondo que uma força F
constante atue sobre esta partícula, na mesma direção do movimento. A equação horária da
velocidade da partícula é dada pela equação:
v v o a t
Multiplicando toda a equação pela massa m e sabendo que F = m a, temos:
mv m v o m a t
mv m v o F t
mv m v o F t
O termo do lado direito da equação acima é chamado de impulso da força F, denotado por J, ou
seja, é o impulso, que a partícula recebeu, produzido pela força F durante um tempo de atuação t.
Im pulso J F t
O lado esquerdo contém o produto da massa e velocidade da partícula em dois instantes de tempo
diferentes. Este produto recebe o nome de momento linear (momento ou quantidade de movimento),
denotado por p.
Momento Linear p m v
Assim, temos que, o impulso produzido na partícula é igual à variação do seu momento linear:
F t mv m v o
J p po
J p
No S.I, a unidade de impulso e momento linear é o newton x segundo: N.s
Impulso de força variável
Se uma força variável atua sobre a partícula em uma direção constante, durante um intervalo de
tempo, o impulso produzido pela força pode ser determinado pela área da figura abaixo da curva que
representa a variação da força em função do tempo.
Conservação do Momento Linear
Sempre que existir uma força de interação entre duas partículas, o momento linear de cada uma
delas é alterado, como resultado da força exercida sobre ela pela outra partícula. Como pela Terceira
Lei de Newton, a força sobre uma partícula é sempre igual em intensidade e oposta em sentido, os
impulsos das forças tem módulos iguais e sentidos opostos. Então, a variação vetorial do momento
linear de qualquer das partículas, em qualquer intervalo de tempo, é igual em módulo e de sentido
oposto à variação vetorial do momento linear da outra.
Este princípio pode ser enunciado de maneira mais simples definindo-se o momento total do
sistema, como a soma vetorial dos momentos dos corpos individualmente. Se a variação do
momento de um corpo é exatamente o negativo da de outro corpo, então, a variação no momento
total tem que ser zero. Desta maneira, quando dois corpos interagem apenas entre si, o momento
total é constante.
Os dois corpos citados acima formam um sistema, onde toda força trocada entre eles é chamada
de força interna ao sistema e, toda força que é exercida por um agente de fora do sistema é
chamada de força externa.
31
"Quando a força resultante externa exercida sobre um sistema for nula, o momento linear do
sistema será constante no tempo". Este é o enunciado do princípio da conservação do momento
linear.
Com isto, temos: O momento pi em um instante inicial ti é igual ao momento pf em um instante
final tf:
pi p f
Colisões
Quando dois ou mais corpos interagem entre si, através de colisão, forças impulsivas são
trocadas, podendo alterar o módulo, a direção e o sentido da velocidade destes corpos. Estes corpos
em colisão constituem um sistema, ou seja, podemos aplicar o conceito de conservação do
momento.
As colisões costumam ser classificadas por comparação da energia cinética dos objetos após a
colisão com a energia cinética antes da colisão. Se a energia cinética após a colisão é a mesma que
antes da colisão, a colisão é chamada elástica. Se a energia cinética após a colisão é menor do que
era antes da colisão, a colisão é chamada inelástica. No extremo oposto de uma colisão elástica,
está uma colisão completamente inelástica, na qual os objetos em colisão se unem e passam a se
mover como um único corpo. Durante uma colisão completamente inelástica, dissipa-se um máximo
de energia cinética.
Exemplos:
1. Uma bola de tênis de 0,070 kg avança horizontalmente com sentido para o norte, com uma
velocidade de 30 m/s, quando é atingida por uma raquete. Após o choque, a bola passa a viajar
com sentido para o sul, com uma velocidade de 40 m/s. Qual o módulo e o sentido do impulso
exercido pela raquete sobre a bola?
2. Dois corpos movem-se, um contra o outro sobre uma superfície horizontal sem atrito, com
velocidades que estão indicadas na figura. Supondo que, após a colisão, o corpo B mova-se para
a direita com velocidade final de 2 m/s, qual a velocidade final do corpo A?
3. Na figura, o corpo A, de massa 5 kg, move-se com velocidade inicial vA1 = 2 m/s, paralelamente
ao eixo x e colide com o corpo B, de massa 3 kg, inicialmente em repouso. Após a colisão, a
velocidade de A é vA2 = 1 m/s na direção que forma um ângulo de = 30o com a direção inicial.
Determine a velocidade final vB2 de B e a sua direção em relação ao eixo x.