Introdução e Motivação Preliminares Diagonalização de Operadores Aplicações Referências
Álgebra Linear
Diagonalização de Operadores
Joseph Nee Anyah Yartey
Universidade Estadual Vale do Acaraci - Sobral - CE
Semana da Matemática 2011
26 a 30 de setembro
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores Aplicações Referências
Índice
1
2
3
4
5
Introdução e Motivação
Preliminares
Espaços Vetoriais
Transformações Lineares
Transformações Lineares e Matrizes
Diagonalização de Operadores
Autovalores e Autovetores
Diagonalização de Operadores
Formas Canônicas de Jordan
Aplicações
Potências de uma matriz
Exponencial de uma matriz
Sistemas de Equações Lineares com coeficientes constantes
Classificação de Cônicas
Referências
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores Aplicações Referências
Introdução e Motivação
Álgebra Linear o estudo sobre transformações lineares, que
são representados por matrizes agindo sobre vetores.
Autovalores, autovetores e auto-espaços são propriedades de
uma matriz. Eles capturam todas as propriedades essenciais
da matriz ou o correspondente transformação.
Historicamente, a importância de autovalores e os autovetores
correspondentes surgiu a partir de estudos em fı́sica e no
estudo das formas quadráticas e equações diferenciais.
Estes têm aplicações em diversas áreas da ciência, em
particular, na economia, engenharia mecânica, finanças,
quantum, matemática e estatı́stica.
Muitas das aplicações envolvem o uso de autovalores e
autovetores no processo de transformar uma determinada
matriz em uma matriz diagonal, discutimos este processo
neste mini-curso.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores Aplicações Referências
Introdução e Motivação
Álgebra Linear o estudo sobre transformações lineares, que
são representados por matrizes agindo sobre vetores.
Autovalores, autovetores e auto-espaços são propriedades de
uma matriz. Eles capturam todas as propriedades essenciais
da matriz ou o correspondente transformação.
Historicamente, a importância de autovalores e os autovetores
correspondentes surgiu a partir de estudos em fı́sica e no
estudo das formas quadráticas e equações diferenciais.
Estes têm aplicações em diversas áreas da ciência, em
particular, na economia, engenharia mecânica, finanças,
quantum, matemática e estatı́stica.
Muitas das aplicações envolvem o uso de autovalores e
autovetores no processo de transformar uma determinada
matriz em uma matriz diagonal, discutimos este processo
neste mini-curso.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores Aplicações Referências
Introdução e Motivação
Álgebra Linear o estudo sobre transformações lineares, que
são representados por matrizes agindo sobre vetores.
Autovalores, autovetores e auto-espaços são propriedades de
uma matriz. Eles capturam todas as propriedades essenciais
da matriz ou o correspondente transformação.
Historicamente, a importância de autovalores e os autovetores
correspondentes surgiu a partir de estudos em fı́sica e no
estudo das formas quadráticas e equações diferenciais.
Estes têm aplicações em diversas áreas da ciência, em
particular, na economia, engenharia mecânica, finanças,
quantum, matemática e estatı́stica.
Muitas das aplicações envolvem o uso de autovalores e
autovetores no processo de transformar uma determinada
matriz em uma matriz diagonal, discutimos este processo
neste mini-curso.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores Aplicações Referências
Introdução e Motivação
Álgebra Linear o estudo sobre transformações lineares, que
são representados por matrizes agindo sobre vetores.
Autovalores, autovetores e auto-espaços são propriedades de
uma matriz. Eles capturam todas as propriedades essenciais
da matriz ou o correspondente transformação.
Historicamente, a importância de autovalores e os autovetores
correspondentes surgiu a partir de estudos em fı́sica e no
estudo das formas quadráticas e equações diferenciais.
Estes têm aplicações em diversas áreas da ciência, em
particular, na economia, engenharia mecânica, finanças,
quantum, matemática e estatı́stica.
Muitas das aplicações envolvem o uso de autovalores e
autovetores no processo de transformar uma determinada
matriz em uma matriz diagonal, discutimos este processo
neste mini-curso.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores Aplicações Referências
Introdução e Motivação
Álgebra Linear o estudo sobre transformações lineares, que
são representados por matrizes agindo sobre vetores.
Autovalores, autovetores e auto-espaços são propriedades de
uma matriz. Eles capturam todas as propriedades essenciais
da matriz ou o correspondente transformação.
Historicamente, a importância de autovalores e os autovetores
correspondentes surgiu a partir de estudos em fı́sica e no
estudo das formas quadráticas e equações diferenciais.
Estes têm aplicações em diversas áreas da ciência, em
particular, na economia, engenharia mecânica, finanças,
quantum, matemática e estatı́stica.
Muitas das aplicações envolvem o uso de autovalores e
autovetores no processo de transformar uma determinada
matriz em uma matriz diagonal, discutimos este processo
neste mini-curso.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores Aplicações Referências
Introdução e Motivação
Matrizes diagonais são interessantes porque elas são fáceis
de trabalhar - elas comportam-se como escalares quando são
somadas ou multiplicadas.
Diagonalização significa transformar uma matriz não diagonal
em uma matriz que é equivalente ao uma matriz diagonal.
Todos os operadores lineares que vamos falar sobre agir em
espaços de finite dimensional diferente de zero.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores Aplicações Referências
Introdução e Motivação
Matrizes diagonais são interessantes porque elas são fáceis
de trabalhar - elas comportam-se como escalares quando são
somadas ou multiplicadas.
Diagonalização significa transformar uma matriz não diagonal
em uma matriz que é equivalente ao uma matriz diagonal.
Todos os operadores lineares que vamos falar sobre agir em
espaços de finite dimensional diferente de zero.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores Aplicações Referências
Introdução e Motivação
Matrizes diagonais são interessantes porque elas são fáceis
de trabalhar - elas comportam-se como escalares quando são
somadas ou multiplicadas.
Diagonalização significa transformar uma matriz não diagonal
em uma matriz que é equivalente ao uma matriz diagonal.
Todos os operadores lineares que vamos falar sobre agir em
espaços de finite dimensional diferente de zero.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Espaços
Aplicações
Vetoriais Referências
Transformações Lineares Transformações Li
Espaços Vetoriais
Intuitivamente, um espaço vetorial é um conjunto de elementos,
que chamamos vetores, com os quais podemos efetuar
combinações lineares, isto é, somas de elementos e multiplicação
de elementos por números, que chamamos escalares.
Definição 1
Seja K um corpo.
Um espaço vetorial é um conjunto V , não vazio, munido de duas
operações:
soma + : V × V −→
V
e
(v , w ) 7−→ v + w
multiplicação por escalar · : K × V →
V
(k, v ) 7−→ k · v
tais que para quaisquer u, v e w ∈ V e a, b ∈ K as seguintes
propriedades são satisfeitas:
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Espaços
Aplicações
Vetoriais Referências
Transformações Lineares Transformações Li
1
(u + v ) + w =
u + (v + w ) (propriedade associativa em relação à adição).
2
u + w = w + v (propriedade comutativa ).
3
∃ 0 ∈ V tal que u + 0 = u (0 é chamado vetor nulo).
4
5
6
7
8
∃ − u ∈ V tal que u + (−u) = 0.
a · (u + v ) = a · u + a · v .
(a + b) · u = a · u + a · v .
(a · b·)v = a · (b · v ) (propriedade associativa).
1 · u = u.
Exemplos
Rn e Cn
Mm×n (K); K = R ou C
Pn (K); K = R ou C
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Espaços
Aplicações
Vetoriais Referências
Transformações Lineares Transformações Li
Transformações Lineares
Definição 2
Sejam V e W espaços vetoriais sobre um mesmo corpo K, e n,
m números naturais.
Uma função T: V → W é dita linear se satisfaz:
(i) T (u + v ) = T (u) + T (v )
∀u, v ∈ V , ∀λ ∈ K.
(ii) T (λu) = λu
Transformações lineares preservam as operações que definem um
espaço vetorial, soma e multiplicação por escalar. Em outras
palavras, elas preservam combinações lineares.
Definição 3
Uma transformação linear T:
V
→
V é dita operador linear.
Notação: L(V ) = L(V , V ).
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Espaços
Aplicações
Vetoriais Referências
Transformações Lineares Transformações Li
Exemplos de Operadores Lineares em R2
Reflexão em torno do eixo x : T (x, y ) = (x, −y )
Reflexão em torno do eixo y : T (x, y ) = (−x, y )
Reflexão em torno da origem:
T (x, y ) = (−x, −y )
Reflexão em torno da reta y = x : T (x, y ) = (y , x)
Rotação: T (x, y ) = (x cos θ − y sen θ, x sen θ + y cos θ)
Dilatação ou Contração
|k| > 1 : dilatação
|k| < 1 : contração
T (x, y ) = (kx, ky )
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Espaços
Aplicações
Vetoriais Referências
Transformações Lineares Transformações Li
Exemplos de Operadores Lineares em R2
Reflexão em torno do eixo x : T (x, y ) = (x, −y )
Reflexão em torno do eixo y : T (x, y ) = (−x, y )
Reflexão em torno da origem:
T (x, y ) = (−x, −y )
Reflexão em torno da reta y = x : T (x, y ) = (y , x)
Rotação: T (x, y ) = (x cos θ − y sen θ, x sen θ + y cos θ)
Dilatação ou Contração
|k| > 1 : dilatação
|k| < 1 : contração
T (x, y ) = (kx, ky )
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Espaços
Aplicações
Vetoriais Referências
Transformações Lineares Transformações Li
Exemplos de Operadores Lineares em R2
Reflexão em torno do eixo x : T (x, y ) = (x, −y )
Reflexão em torno do eixo y : T (x, y ) = (−x, y )
Reflexão em torno da origem:
T (x, y ) = (−x, −y )
Reflexão em torno da reta y = x : T (x, y ) = (y , x)
Rotação: T (x, y ) = (x cos θ − y sen θ, x sen θ + y cos θ)
Dilatação ou Contração
|k| > 1 : dilatação
|k| < 1 : contração
T (x, y ) = (kx, ky )
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Espaços
Aplicações
Vetoriais Referências
Transformações Lineares Transformações Li
Exemplos de Operadores Lineares em R2
Reflexão em torno do eixo x : T (x, y ) = (x, −y )
Reflexão em torno do eixo y : T (x, y ) = (−x, y )
Reflexão em torno da origem:
T (x, y ) = (−x, −y )
Reflexão em torno da reta y = x : T (x, y ) = (y , x)
Rotação: T (x, y ) = (x cos θ − y sen θ, x sen θ + y cos θ)
Dilatação ou Contração
|k| > 1 : dilatação
|k| < 1 : contração
T (x, y ) = (kx, ky )
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Espaços
Aplicações
Vetoriais Referências
Transformações Lineares Transformações Li
Exemplos de Operadores Lineares em R2
Reflexão em torno do eixo x : T (x, y ) = (x, −y )
Reflexão em torno do eixo y : T (x, y ) = (−x, y )
Reflexão em torno da origem:
T (x, y ) = (−x, −y )
Reflexão em torno da reta y = x : T (x, y ) = (y , x)
Rotação: T (x, y ) = (x cos θ − y sen θ, x sen θ + y cos θ)
Dilatação ou Contração
|k| > 1 : dilatação
|k| < 1 : contração
T (x, y ) = (kx, ky )
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Espaços
Aplicações
Vetoriais Referências
Transformações Lineares Transformações Li
Exemplos de Operadores Lineares em R2
Reflexão em torno do eixo x : T (x, y ) = (x, −y )
Reflexão em torno do eixo y : T (x, y ) = (−x, y )
Reflexão em torno da origem:
T (x, y ) = (−x, −y )
Reflexão em torno da reta y = x : T (x, y ) = (y , x)
Rotação: T (x, y ) = (x cos θ − y sen θ, x sen θ + y cos θ)
Dilatação ou Contração
|k| > 1 : dilatação
|k| < 1 : contração
T (x, y ) = (kx, ky )
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Espaços
Aplicações
Vetoriais Referências
Transformações Lineares Transformações Li
Matriz Associada a uma Transformação Linear
Transformações lineares estão ligados a matrizes.
Seja B = (bij ) uma matriz m × n e seja y = Bx onde x ∈ Rn , e
considere a aplicação TB (x) = Bx.
Então TB : Rn −→ Rm define uma transformação linear.
Em particular, qualquer matriz A, n × n pode ser visto como uma
aplicação de Rn para Rn . Reciprocamente temos a seguinte
proposição:
Proposição
Se T : V → W é linear, dim V = n e dim W = m, então
T (v ) = Av , onde A ∈ Mm×n (K), a matriz A é única a memos de
isomorfismo.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Espaços
Aplicações
Vetoriais Referências
Transformações Lineares Transformações Li
Proposição
Sejam V e W espaços vetoriais tais que {v1 , · · · , vn } é uma base
de V e {w1 , · · · , wn } vetores arbitrários em W . Então
∃!T : V → W linear tal que T (vi ) = wi i = 1, · · · , n.
Definição
Sejam T : V → W linear, dim V = n, dim W = m, βV =
{v1 , v2 , · · · , vn } e βW bases de V e W , respectivamente. Dize
mos que [T ]ββVW =
[T (v1 )]βW | · · · | [T (vn )]βW m×n
é a matriz de T em relação as bases βV e βW .
Definição
′
Quando β e β são bases de V e I : V → V é a identidade, a
′
matriz de I em relação às bases β e β é chamada matriz mudança
′
de base de β para β .
Notação: [I ]ββ ′ .
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Espaços
Aplicações
Vetoriais Referências
Transformações Lineares Transformações Li
Proposição
Sejam V , W espaços
e T: V → W linear.
′
β, β bases de W então:
vetoriais de dimensão finita
′
Considere α, α bases de V e
′
′
[T ]αβ ′ = [I ]ββ ′ · [T ]αβ · [I ]αα .
[V ]α′ ∈ V
T
I
[V ]α ∈ V
[w ]β ′ ∈ W
I
T
[w ]β ∈ W
′
Observe que [T ]αβ ′ e [T ]αβ são matrizes semelhantes.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Espaços
Aplicações
Vetoriais Referências
Transformações Lineares Transformações Li
Exemplos
Exemplo 1: As matrizes associadas a alguns dos
operadores lineares no espaço vetorial R 2 em relação
à base canônica.
1 0
Reflexão em torno do eixo x :
0 −1
cos θ − sen θ
Rotação :
sen θ
cos θ
Exemplo 2: Considere a transformação linear
T : M2×2 (R) −→ R3
a c
T
= (a + b, c − d, 2a)
b d
Determine [T ]A,B , onde A e B são as bases
canônicas de M2×2 (R) e de R3
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Autovalores e Autovetores
Definição
Sejam K corpo, T ∈ L(V ) e V espaço vetorial sobre o corpo K,
de dimensão n. Dizemos que λ ∈ K é um autovalor de T se existe
v ∈ (V \ {0}) tal que T (v ) = λv . Neste caso, dizemos que v é um
autovetor de T associado a λ.
Em resumo
Um autovetor é um vetor que mantém sua direção depois de
passar por uma transformação linear.
Uma autovalor é o valor escalar que o autovetor foi
multiplicado por durante a transformação linear.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Definição
Seja λ e um autovalor do operador linear T . O conjunto
Vλ = {v ∈ V |T (v ) = λv } = ker(T − λI ) de todos os autovetores
associados a λ juntamente com o vetor nulo 0V , e denominado
autoespaço correspondente ao autovalor λ .
A dimensão de Vλ é chamado multiplicidade geométrico do autovalor.
Definição
O conjunto de todos os autovalores de T é chamado de espectro de
T.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Exemplo
1
3 0
O vetor x =
é um autovetor da matriz
2
8 −1
corresponde
a autovalor
λ =3, pois
3 0
1
3
Ax =
=
= 3x
8 −1
2
6
2
3 0
O vetor x =
não é um autovetor da matriz
3
8 −1
pois não
existe
escalar
λ
tal
que
3 0
2
6
Ax =
=
= λx
8 −1
3
13
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Cálculo de Autovalores, Autovetores e Autoespaços
Para determinar os autovalores de uma matriz A, considere a
equação
Ax = λx ⇔ (A − λI )x = 0
(1)
A equação (1) tem um solução não nulo se e somente se
det(A − λI ) = 0
Equação (2) é chamado a equação caracterı́stica de A.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
(2)
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Exemplo
0
1
0
Determine os autovalores de 0
0
1
4 −17 8
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Diagonalização de Operadores
Dado um operador linear T : V −→ V , queremos encontrar uma
base β de V na qual a matriz do operador nessa base ([T ]ββ ) seja
uma matriz diagonal.
Problema 1: Dada uma matriz A, n × n, existe uma base de Rn
de autovetores de A?
Problema 2: Dada uma matriz A, n × n, existe uma matriz
invertı́vel P −1 tal que P −1 AP seja diagonal?
Definição
Uma matriz quadrada A é diagonalizável se existe uma matriz invertı́vel P tal que P −1 AP é uma matriz diagonal. Dizemos que P
diagonaliza A.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Teorema
Se A é uma matriz n × n, então são equivalentes
A é diagonalizável
A possui n autovetores linearmente independentes
Exemplo
0 0 −2
Verifique se A = 1 2 1 é diagonalizável.
1 0 3
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Solução:
Equação caracterı́stica: (λ − 1)(λ − 2)2 = 0
−1
0
λ1 = 2 ⇒ v1 =
0
, v2 =
1
1
0
−2
λ2 = 1 ⇒ v3 =
1
1
Existe 3 autovetores linearmente independentes, portanto A é
diagonalizável.
−1 0 −2
P = 0 1 1 diagonaliza A.
1 0 1
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
1
0 2
0 0 −2
−1 0 −2
P −1 AP = 1
1 1 1 2 1 0
1 1
−1 0 −1
1 0 3
1
0 1
2 0 0
= 0 2 0
0 0 1
Exemplo
1 0 0
Verifique se A = 1 2 0 é diagonalizável.
−3 5 2
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Solução:
Equação caracterı́stica: (λ − 1)(λ − 2)2 = 0
0
λ1 = 2 ⇒ v1 = 0
1
1
8
λ2 = 1 ⇒ v2 = − 1
8
1
Como A é uma matriz 3 × 3, mas existe somente 2
autovetores, A não é diagonalizável.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Teorema
Se A é uma matriz n × n,
Para qualquer autovalor de A, a multiplicidade geométrica é
menor ou igual a multiplicidade algébrica.
A é diagonalizável se e somente se, para qualquer autovalor, a
multiplicidade geométrica é igual a multiplicidade algébrica.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Formas Canônicas de Jordan
Definição
Seja λ ∈ K. Um λ - bloco de Jordan é uma matriz quadrada com
todas as entradas da diagonal iguais a λ, as entradas imediatamente
abaixo da diagonal iguais a 1 e as demais entradas nulas.
Notação: Jλ .
Exemplo
J2 =
1 1
0 1
1 1 0
J3 = 0 1 1
0 0 1
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Uma outra definição que pode ser encontrada em alguns livros
para um λ - bloco de Jordan é: Uma matriz quadrada com todas
as entradas da diagonal iguais a λ, as entradas imediatamente
acima da diagonal iguais a 1 e as demais entradas nulas.
Exemplo
Uma matriz A está na forma canônica de Jordan se ela é escrita
com blocos de Jordan na diagonal e as outras entradas nulas, ou
seja,
Jλ1 0
0 ··· 0
0 Jλ
0 ··· 0
2
.
..
.
.
. 0
0
A= 0
..
.. . .
..
..
.
.
.
.
.
0
0
0 · · · Jλr
onde cada Jλi tem um tamanho especı́fico não necessariamente igual
aos dos outros.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Exemplo
3
···
0
0
···
0
..
.
···
..
.
..
.
···
..
.
0
···
0
···
2
0
1
···
2
···
0
0
Joseph Nee Anyah Yartey
..
.
···
..
.
..
.
···
..
.
0
···
0
0
···
2
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Teorema
Seja T ∈ L(V ) onde V
dimensão n. Suponhamos
é um espaço vetorial, sobre K, de
pT (x) = (x − λ1 )s1 · (x − λ2 )s2 · · · (x − λr )sr e
mT (x) = (x − λ1 )d1 · (x − λ2 )d2 · · · (x − λr )dr .
Então:
1
Existe, pelo menos, um bloco de Jordan de tamanho di × di
associado ao autovalor λi .
2
O número de blocos de Jordan de T associados ao autovalor
λi é a dimensão do autoespaço associado a λi , ou seja, é
igual a dimensão de Eλi = Ker (T − λi In ).
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Exemplo
Seja A uma matriz de ordem 9 × 9 cujo polinômio caracterı́stico
é (x − 3)5 · (x − 2)4 e cujo polinômio minimal é
(x − 3)3 · (x − 2)2 .
A menos de isomorfismos, as possı́veis formas Canônicas de Jordan
de A são:
3
1
0
0
0
0
0
0
0
0
3
1
0
0
0
0
0
0
0
0
3
0
0
0
0
0
0
0
0
0
3
0
0
0
0
0
0
0
0
0
3
0
0
0
0
0
0
0
0
0
2
1
0
0
0
0
0
0
0
0
2
0
0
0
0
0
0
0
0
0
2
0
0
0
0
0
0
0
0
0
2
Joseph Nee Anyah Yartey
3
1
0
0
0
0
0
0
0
0
3
1
0
0
0
0
0
0
0
0
3
0
0
0
0
0
0
0
0
0
3
1
0
0
0
0
0
0
0
0
3
0
0
0
0
0
0
0
0
0
2
1
0
0
0
0
0
0
0
0
2
0
0
Álgebra Linear Diagonalização de Operadores
0
0
0
0
0
0
0
2
0
0
0
0
0
0
0
0
0
2
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
3
1
0
0
0
0
0
0
0
0
3
1
0
0
0
0
0
0
0
0
3
0
0
0
0
0
0
0
0
0
3
0
0
0
0
0
0
0
0
0
3
0
0
0
0
0
0
0
0
0
2
1
0
0
0
0
0
0
0
0
2
0
0
0
0
0
0
0
0
0
2
1
0
0
0
0
0
0
0
0
2
Joseph Nee Anyah Yartey
3
1
0
0
0
0
0
0
0
0
3
1
0
0
0
0
0
0
0
0
3
0
0
0
0
0
0
0
0
0
3
1
0
0
0
0
0
0
0
0
3
0
0
0
0
0
0
0
0
0
2
1
0
0
0
0
0
0
0
0
2
0
0
Álgebra Linear Diagonalização de Operadores
0
0
0
0
0
0
0
2
1
0
0
0
0
0
0
0
0
2
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Sejam T ∈ L(V ) e V espaço vetorial, sobre o corpo K, de
dimensão n.
Problema: O que fazer caso o operador T não seja
diagonalizável? Existem alguns teoremas que nos garantem a
existência de uma base para V , na qual T tem uma
representação matricial mais conveniente?
Além da Forma Canônica de Jordan, vejamos mais um resultado
que nos permite obter uma representação matricial mais
conveniente para T :
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Teorema
Se mT (x) = (x − λ1 )d1 · (x − λ2 )d1 · · · (x − λr )dr então existe uma
base α para V tal que [T ]αα = D + N, D operador diagonal e
N operador nilpotente.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Autovalores
Aplicações
e Autovetores
ReferênciasDiagonalização de Operadores For
Algumas Conseqüências
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Aplicação 1: Potências de uma matriz
A maior aplicação direta de diagonalização é que ele nos dá uma
maneira fácil para calcular grandes potências de uma matriz A, o
que seria impossı́vel de outra forma.
Caso I
Seja A uma matriz de ordem n diagonalizável, então existe uma
matriz inversı́vel M tal que
M −1 AM = D ou A = MDM −1
onde M uma matriz formada colocando uma base de autovetores de
A como colunas, e D é uma matriz diagonal com os autovalores de
A na diagonal.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Portanto, podemos escrever
Ak
= (MDM −1 )k = (MDM −1 )(MDM −1 ) · · · (MDM −1 )(MDM −1 )
|
{z
}
k vezes
= MD(M −1 M)D(M −1 M)D · · · D(M −1 M)DM −1
= MD k M −1
Sendo que a última expressão é fácil de calcular, mesmo para k
grande, porque uma potência de uma matriz diagonal é apenas a
potência das entradas diagonais.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Exemplo 1
Se A =
4 4
, determine A23 .
1 4
Solução
A matriz A tem auto
2 e λ2 = 6 com respectivos
valores
λ1 = 2
2
auto-vetores vλ1 =
e vλ2 =
.
−1
1
Portanto,
2 0
2 2
D=
e M=
0 6
−1 1
1 1 −2
2 0
−1
−1
Então M AM =
= D onde M
=
0 6
4 1 2
−1
Portanto A = MDM
e
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
23 −1
A23 = MD
M
23
1
2 2
2
0
1 −2
=
1 2
0 623
4 −1 1
que é mais fácil de calcular.
Caso II
Seja A uma matriz de ordem n não diagonalizável com autovalores λ1 , λ2 , · · · λn contando com multiplicidade, então existe uma
matriz de Jordan J e uma matriz inversı́vel M tal que
M −1 AM = J ou A = MJM −1
Joseph Nee Anyah Yartey
sendo
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
λ1
.
.
J = .
ou seja
1
λ2
0
1
λ3
0
..
0
1
..
.
.
0
..
λ1
λ2
..
.
.
= ..
1
0
λn
1
0
.
.
+ .
0
0
1
0
..
0
1
..
.
.
.
0
λ3
..
..
.
.
..
. +
λn
..
.
1
0
J =D +N
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
onde D é uma matriz diagonal e N é uma matriz nilpotente de
ordem n, ou seja N n = 0. Como DN = ND, temos que
Jk
= (D + N)k
k
k
k
k−1
= D +
D
N + ··· +
D k−n+1 N n−1 (∗)
1
n−1
Portanto para k ≥ 2,
Ak = MJ k M −1 , onde J k é a expressão em (∗).
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Exemplo 2
Se A =
9
4
, determine An .
−9 −3
Solução
A matriz
A tem
auto valor λ1 = 3 com multiplicidade 2 e auto-vetor
−2
vλ1 =
. Portanto ela não diagonalizável e
3
3 1
J =
0 3
= D +N
=
3 0
0 3
+
0 1
0 0
a
−2 a
Procuramos um outro vetor v =
tal que M =
é
b
3 b
inversı́vel e M −1 AM = J. Escolhemos a = −1, b = 1.
Portanto,
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
M=
−2 −1
3
1
e M
−1
=
1
1
−3 −2
Agora, como DN = ND e N 2 = 0, temos
J n = (D + n)n = D n + nD n−1 N =
n
n−1
3
0
3
0
0 1
=
+n
=
0 3n
0
3n−1
0 0
n
3 n3n−1
=
0
3n
Logo
A
n
n
−1
−2 −1
3
1
3n n3n−1
0
3n
= MJ M =
3 + 6n
4n
n−1
= 3
.
−9n 3 − 6n
Joseph Nee Anyah Yartey
1
1
−3 −2
Álgebra Linear Diagonalização de Operadores
=
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Aplicação 2: Exponencial de uma matriz
Agora, se podemos calcular grandes potências de uma matriz,
então podemos tentar fazer Series de Taylor com matrizes
também! (Terı́amos que se preocupar se eles convergem também,
mas isso não é uma questão para esta curso).
∞
X
Em análoga com a série e x =
, então nós define a matriz
n=1
exponencial de uma n × n, matriz A por
eA =
∞
X
Ak
k=0
k!
= Id + A +
A2 A3
Ap
+
+ ··· +
+ ···
2!
3!
p!
Fato
A soma acima converge para uma matriz com entradas finito para
qualquer matriz A.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Proposição
e 0 = Id
Se A e B são duas matrizes que comuta de mesma ordem
então e A+B = e A · e B
Se A e B são duas matrizes de mesma ordem com B
−1
inversı́vel, então que e BAB = Be A B −1
Para qualquer matriz quadrada A, temos que e A é sempre
inversı́vel com inversa e −A .
d
Se D =
então D(e A·t ) = A · e A·t
dt
Agora vamos estudar a forma de calcular a exponencial de uma
matriz:
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Proposição
e 0 = Id
Se A e B são duas matrizes que comuta de mesma ordem
então e A+B = e A · e B
Se A e B são duas matrizes de mesma ordem com B
−1
inversı́vel, então que e BAB = Be A B −1
Para qualquer matriz quadrada A, temos que e A é sempre
inversı́vel com inversa e −A .
d
Se D =
então D(e A·t ) = A · e A·t
dt
Agora vamos estudar a forma de calcular a exponencial de uma
matriz:
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Proposição
e 0 = Id
Se A e B são duas matrizes que comuta de mesma ordem
então e A+B = e A · e B
Se A e B são duas matrizes de mesma ordem com B
−1
inversı́vel, então que e BAB = Be A B −1
Para qualquer matriz quadrada A, temos que e A é sempre
inversı́vel com inversa e −A .
d
Se D =
então D(e A·t ) = A · e A·t
dt
Agora vamos estudar a forma de calcular a exponencial de uma
matriz:
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Proposição
e 0 = Id
Se A e B são duas matrizes que comuta de mesma ordem
então e A+B = e A · e B
Se A e B são duas matrizes de mesma ordem com B
−1
inversı́vel, então que e BAB = Be A B −1
Para qualquer matriz quadrada A, temos que e A é sempre
inversı́vel com inversa e −A .
d
Se D =
então D(e A·t ) = A · e A·t
dt
Agora vamos estudar a forma de calcular a exponencial de uma
matriz:
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Caso I
Se A uma matriz nilpotente (Ak+1 = 0 para algum k) então a série
é uma soma finita:
e A = Id + A +
A2 A3
Ak
+
+ ··· +
2!
3!
k!
Exemplo 3
0 1 2
Se A = 0 0 1 , calcule e A .
0 0 0
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Solução
Calculamos potências de A :
0 0 1
A2 = 0 0 0 ,
0 0 0
Logo An = 0, ∀n ≥ 3. Portanto
0 0 0
A3 = 0 0 0
0 0 0
1 1 5/2
1
e A = Id + A + A2 = 0 1 1
2
0 0 1
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Caso II
Se A uma matriz diagonalizável,ou seja,
λ
1
λ2
...
−1
A = MDM onde D =
0
então a série é uma somainfinita:
e λ1
e λ2
.
e A = Me D M −1 = M . .
0
Joseph Nee Anyah Yartey
..
..
0
λ3
..
..
.
.
.
e λ3
..
.
..
.
λn
0
..
.
.
. . −1
. M .
e λn
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Exemplo 3
4 4
Se A =
, calcule e A .
1 4
Solução
Do Exemplo 1 acima
1 1 −2
2 0
2 2
−1
D=
, M=
eM =
0 6
−1 1
4 1 2
Logo
2
1 2e 2 + 2e 6 4e 6 − 4e 2
e
0
A
−1
e =M
M =
. 0 e6
e6 − e2
2e 2 + e 6
4
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Caso III
Se A uma matriz de ordem n não diagonalizável, então existe uma
matriz de Jordan J e uma matriz inversı́vel M tal que
M −1 AM = J, sendo J = D + N,
onde D diagonal e N nilpotente de ordem n.
Como DN = ND e N n = 0 temos que
N2
N n−1
J
D+N
D N
D
e =e
= e .e = e
I +N +
+ ··· +
2!
(n − 1)!
Portanto,
e A = Me J M −1 .
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Exemplo 4
9
4
Se A =
, calcule e tA .
−9 −3
Solução
Do Exemplo
2 acima
3 1
−2 −1
1
1
−1
J=
= D + N, M =
eM =
0 3
3
1
−3 −2
Logo
1 t
Jt
Dt Nt
Dt
3t
e = e .e = e (I + tN) = e
0 1
Portanto
A
3t
e = e .M
1 t
0 1
M
−1
Joseph Nee Anyah Yartey
=e
3t
1 + 6t
4t
−9t 1 − 6t
. Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Aplicação 3: Sistemas de Equações com coeficientes
constantes
Um sistema de equações diferenciais ordinárias lineares com
coeficientes constantes pode ser escrito na forma matricial por
Ẋ = AX , onde A é uma matriz n × n com coeficientes constantes
x1
x˙1
x˙2
x2
dX
x3
)
X =
e Ẋ = x˙3 (Notação: Ẋ =
..
..
dt
.
.
xn
x˙n
Podemos escrever A como MJM −1 onde J é uma matriz diagonal
ou na forma canônica de Jordan. Fazendo a mudança X = MY , o
sistema fica equivalente a
Ẏ = JY
que é mais fácil de resolver.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Exemplo 5
Resolve os sistema
x˙1 = 3x1 + 4x2
x˙2 = 3x1 + 2x2
dado que quando t = 0, X (0) = (x1 , x2 )t = (6, 1)t .
Solução:
x˙1 = 3x1 + 4x2
⇔
x˙2 = 3x1 + 2x2
x˙1
x˙2
=
3 4
3 2
x1
x2
3 4
Seja A =
. Então
3 2
3−λ
4
PA (λ) = det
= (λ − 6)(λ + 1)
3
2−λ
6 0
⇒ λ1 = 6, λ2 = −1. Portanto J =
0 −1
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Para λ1 = 6, temos o sistema:
−3 4
x
0
=
⇒ Vλ1 = (4, 3)t
3 −4
y
0
Para λ2 = −1, temos o sistema:
4 4
x
0
=
⇒ Vλ2 = (1, −1)t
3 3
y
0
4 1
Portanto a matriz, M =
3 −1
O sistema é equivalente a
Ẏ = JY
Portanto,
y˙1 = 6y1 ⇒ y1 (t) = c1 e 6t
y˙2 = −y2 ⇒ y2 (t) = c2 e −t
Y =
y1
y2
Joseph Nee Anyah Yartey
=
c1 e 6t
c2 e −t
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Logo, a solução é
4 1
c1 e 6t
4c1 e 6t + c2 e −t
X = MY =
=
3 −1
c2 e −t
3c1 e 6t − c2 e −t
Se x1 = 6 e x2 = 1 quando t = 0, então
4c1 + c2
6
X (0) =
=
1
3c1 − c2
e portanto c1 = 1 e c2 = 2. Logo, a solução do problema do valor
inicial é dada por
6t
4e + 2e −t
X =
3e 6t − 2e −t
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Exemplo 6
Ache a solução do sistema ẋ = Ax sujeita a condição
x(0) = (3, −3)t onde
9
4
A=
.
−9 −3
Solução:
Do Exercı́cio 2,
A = MJM
−1
, onde J =
3 1
0 3
eM=
−2 −1
3
1
Fazendo a mudança X = MY , o sistema é equivalente a
Ẏ = JY
y˙1 = 3y1 + y2
y˙2 = 3y2 ⇒ y2 (t) = c2 e 3t
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Portanto,
y˙1 = 3y1 + c2 e 3t ⇒ y1 (t) = (c1 + c2 t)e 3t
Portanto,
Y =
y1
y2
=
(c1 + c2 t)e 3t
c2 e 3t
Logo, a solução é
−2 −1
(c1 + c2 t)e 3t
3t −2c1 − 2c2 t − c2
=e
X = MY =
c2 e 3t
3c1 + 3c2 t + c2
3
1
Se x1 = 3 e x2 = −3 quando t = 0, então
−2c1 − c2
3
X (0) =
=
3c1 + c2
−3
e portanto c1 = 0 e c2 = −3. Logo, a solução do problema do
valor inicial é dada por
1 − 2t
3t
X = −3e
1 + 3t
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Aplicação 4: Classificação de Cônicas
Uma cônica é uma curva descrita em coordenadas canônicas de R2
pela equação
Ax 2 + By 2 + Cxy + Ex + Fy + G = 0
(∗)
onde A, B, C , E , F , G são constantes. A cônica esta na forma
canônica se em relação ao coordenadas canônicas do R2 a sua
equação é da forma:
Ãx 2 + B̃y 2 + G̃ = 0
(∗∗)
Exemplos são os cı́rculos, elipses, parabolas e hipérboles. A
equação (∗) pode ser expressa matricialmente por:
A C
x
x
x y
+ E F
+ G = 0 (∗ ∗ ∗)
C B
y
y
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Nosso objetivo é eliminar o termo
misto Cxy . Para isso,
A C
observamos que a matriz K =
é real simétrica e
C B
portanto é diagonalizável. Ou seja existe uma matriz ortogonal P
cujas colunas são os autovalores normalizados de K tal que
PKP −1 = D, é a matriz diagonal. Portanto, se colocamos
′ x
x
:= P
,
′
y
y
então a equação (∗ ∗ ∗) pode ser escrito como (pois P −1 = P T )
′ x
x
+ E F PT
x y P T DP
+G =0
y
y′
ou seja
x′
y′
D
x′
y′
+
Joseph Nee Anyah Yartey
E
F
P
t
x′
y′
+G =0
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Se D =
λ1 0
0 λ2
temos que
′2
, λ1 e λ2 sendo os autovalores da matriz K ,
′2
λ1 x + λ2 y +
E
F
P
t
x′
y′
+G =0
que não possui mais o termo misto e portanto a sua posição
geométrica será facilmente reconhecida.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
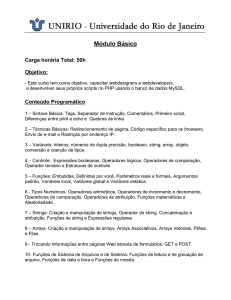
Exemplo 7
Descreva a cônica cuja equação é
20
80
5x 2 − 4xy + 8y 2 + √ x − √ y + 4 = 0.
5
5
Solução:
x
y
5 −2
−2 8
x
y
20
+ √
5
80
−√
5
x
y
+ 4 = 0 (§)
5 −2
Seja K =
.
−2 8
Então
5 − λ −2
PK (λ) = det
= λ2 − 13λ − 36 = (λ − 9)(λ − 4)
−2 8 − λ
⇒ λ1 = 9, λ2 = 4.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
Para λ1 = 9, temos o sistema:
−4 −2
x
0
=
⇒ Vλ1 = (1, −2)t
−2 −1
y
0
Para λ2 = 4, temos o sistema:
1 −2
x
0
=
⇒ Vλ2 = (2, 1)t
−2 4
y
0
Seja P =
"
#
√1
5
−2
√
5
√2
5
√1
5
Fazendo a mudança
u v
9 0
0 4
u
v
"
√1
5
√2
5
−2
√
5
√1
5
então P −1 = P T =
x
u
=P
em (§) temos
y
v
20
+ √
5
Joseph Nee Anyah Yartey
80
−√
5
"
√1
5
−2
√
5
√2
5
√1
5
#
#
u
v
+4 = 0
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores
Potências
Aplicações
de uma Referências
matriz Exponencial de uma matriz Sistema
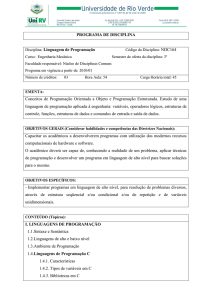
ou seja,
9u 2 + 4v 2 + 36u − 8v + 4 = 0
Completando o quadrado temos que
(u + 2)2 (v − 1)2
+
=1
22
32
que é uma elipse.
y
5
4
3
2
1
−3 −2 −1 0
Joseph Nee Anyah Yartey
1
2
3
x
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores Aplicações Referências
Referências Bibliográficas
1 Lima, Elon Lages, Grupo Fundamental e Espaços de
Recobrimento. Projeto Euclides. Rio de Janeiro: IMPA, 1998.
2 Vilches, Maurı́cio, Introdução à Topologia Algébrica.
Departamento de Análise - IME -UERJ. Rio de Janeiro, 2004,
Edição online: www.ime.uerj.br/∼calculo.
3 Hatcher, Allen, Algebraic Topology. Cambridge University
Press, Edição online:
www.math.cornell.edu/∼ hatcher/AT/ATpage.html
4 Croom, Fred H., Principles of Topology. Saunders College
Publishing 1989.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores Aplicações Referências
Referências Bibliográficas
1 Lima, Elon Lages, Grupo Fundamental e Espaços de
Recobrimento. Projeto Euclides. Rio de Janeiro: IMPA, 1998.
2 Vilches, Maurı́cio, Introdução à Topologia Algébrica.
Departamento de Análise - IME -UERJ. Rio de Janeiro, 2004,
Edição online: www.ime.uerj.br/∼calculo.
3 Hatcher, Allen, Algebraic Topology. Cambridge University
Press, Edição online:
www.math.cornell.edu/∼ hatcher/AT/ATpage.html
4 Croom, Fred H., Principles of Topology. Saunders College
Publishing 1989.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores Aplicações Referências
Referências Bibliográficas
1 Lima, Elon Lages, Grupo Fundamental e Espaços de
Recobrimento. Projeto Euclides. Rio de Janeiro: IMPA, 1998.
2 Vilches, Maurı́cio, Introdução à Topologia Algébrica.
Departamento de Análise - IME -UERJ. Rio de Janeiro, 2004,
Edição online: www.ime.uerj.br/∼calculo.
3 Hatcher, Allen, Algebraic Topology. Cambridge University
Press, Edição online:
www.math.cornell.edu/∼ hatcher/AT/ATpage.html
4 Croom, Fred H., Principles of Topology. Saunders College
Publishing 1989.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores
Introdução e Motivação Preliminares Diagonalização de Operadores Aplicações Referências
Referências Bibliográficas
1 Lima, Elon Lages, Grupo Fundamental e Espaços de
Recobrimento. Projeto Euclides. Rio de Janeiro: IMPA, 1998.
2 Vilches, Maurı́cio, Introdução à Topologia Algébrica.
Departamento de Análise - IME -UERJ. Rio de Janeiro, 2004,
Edição online: www.ime.uerj.br/∼calculo.
3 Hatcher, Allen, Algebraic Topology. Cambridge University
Press, Edição online:
www.math.cornell.edu/∼ hatcher/AT/ATpage.html
4 Croom, Fred H., Principles of Topology. Saunders College
Publishing 1989.
Joseph Nee Anyah Yartey
Álgebra Linear Diagonalização de Operadores