
REGIS TROJAN FEROLDI
Modulação senoidal bipolar PWM aplicada em inversores
de frequência
LONDRINA
2011
UNIVERSIDADE ESTADUAL DE LONDRINA
CURSO DE GRADUAÇÃO EM ENGENHARIA ELÉTRICA
Modulação senoidal bipolar PWM aplicada em inversores
de freqüência
Trabalho de conclusão de curso submetido à
Universidade Estadual de Londrina como parte
dos requisitos para a obtenção do grau de
Engenheiro Eletricista.
REGIS TROJAN FEROLDI
Londrina, outubro de 2011.
Modulação senoidal bipolar PWM aplicada em inversores
de freqüência
Regis Trojan Feroldi
‘Este trabalho foi julgado adequado para a conclusão do curso de engenharia
elétrica e aprovado em sua forma final pela Coordenação do Curso de
Engenharia Elétrica da Universidade Estadual de Londrina.’
________________________________
Prof. Dr. Carlos Henrique Gonçalves Treviso
Orientador
_____________________________________
Profa. Maria Bernadete de Morais França
Coordenadora de TCC
Banca examinadora:
___________________________________
Prof. Msc. André Luiz Batista Ferreira
____________________________________
Prof. Dr. Walter Germanovix
Dedico este trabalho ao meu
pai, à minha mãe e aos
meus avós, que tanto
batalharam
e
me
proporcionaram todas as
oportunidades.
Agradecimentos
Agradeço ao meu pai, à minha mãe, à minha irmã, a todos os outros
familiares, à Fernanda e a todos os meus amigos, que sempre me apoiaram e
me incentivaram em todo o caminho percorrido até aqui.
Agradeço aos professores que contribuíram indiretamente ao longo do
curso para a realização deste trabalho, ao professor orientador Treviso as
orientações e o suporte dados ao longo de todo o trabalho, ao amigo Cristiano
a companhia durante as alegrias e tristezas ao longo deste projeto, ao
professor André os conselhos, aos técnicos Older, Luís Mathias e Luís
Fernando o suporte técnico e a todas as outras pessoas que contribuíram à
sua maneira para a realização deste trabalho.
Resumo do trabalho de conclusão de curso apresentado à Universidade
Estadual de Londrina como parte dos requisitos necessários para obtenção do
grau de Engenheiro Eletricista.
Modulação senoidal bipolar PWM aplicada em inversores
de freqüência
Regis Trojan Feroldi
OUTUBRO/2011
Orientador: Carlos Henrique Gonçalves Treviso
Palavras-chave: Eletrônica de potência, Modulação por largura de pulso,
inversores, PWM.
Este trabalho busca validar a teoria de que é possível diminuir as perdas
por distorção em inversores através da escolha da técnica de modulação por
largura de pulso mais adequada para cada aplicação. Para atingir esse objetivo
foram desenvolvidos dois trabalhos em paralelo, um utilizando a modulação
senoidal bipolar PWM e outro a modulação senoidal unipolar PWM. Ao final foi
feita uma comparação de seus resultados e uma análise para determinar qual
dentre as técnicas de modulação testadas é mais eficiente.
Conteúdo
Lista de siglas .................................................................................................................................ix
Lista de figuras............................................................................................................................... x
Lista de tabelas ............................................................................................................................. xii
1
Introdução ............................................................................................................................. 1
2
Revisão bibliográfica .............................................................................................................. 2
2.1
Inversores de frequência ............................................................................................... 2
2.2
A modulação PWM - Pulse Width Modulation ............................................................. 4
2.2.1
A modulação bipolar ............................................................................................. 7
2.2.2
A modulação unipolar ........................................................................................... 8
2.2.3
O índice de modulação (M) ................................................................................... 9
2.3
Filtros ............................................................................................................................. 9
2.3.1
2.4
Diodos de potência...................................................................................................... 15
2.5
Transistores de potência.............................................................................................. 16
2.5.1
2.6
2.7
Transistores MOSFET ........................................................................................... 16
Isolação das excitações da base e da porta ................................................................. 17
2.6.1
Optoacopladores ................................................................................................. 18
Proteção de dispositivos e circuitos ............................................................................ 19
2.7.1
Dissipadores ........................................................................................................ 19
2.7.2
O circuito de snubber .......................................................................................... 20
2.8
3
Filtro de saída do inversor ................................................................................... 13
Transformadores ......................................................................................................... 21
Desenvolvimento prático .................................................................................................... 25
3.1
O sistema proposto ..................................................................................................... 25
3.2
1ª etapa – Circuito de controle ................................................................................... 25
3.2.1
O gerador de onda triangular .............................................................................. 26
3.2.2
O comparador PWM............................................................................................ 27
3.2.3
O circuito de atraso ............................................................................................. 29
3.3
2ª etapa – Isolação dos pulsos PWM .......................................................................... 30
3.3.1
O drive isolador de pulso..................................................................................... 30
3.3.2
O funcionamento do drive isolador de pulsos .................................................... 31
3.3.3
Fontes Independentes ......................................................................................... 33
3.3.4
O funcionamento das fontes independentes ...................................................... 33
3.3.5
3.4
3ª etapa – Circuito de potência ................................................................................... 43
3.4.1
O inversor ............................................................................................................ 43
3.4.2
O snubber ............................................................................................................ 47
3.4.3
O filtro de saída ................................................................................................... 48
3.4.4
Dissipadores ........................................................................................................ 53
3.5
4
Projeto do transformador da fonte de alimentação ........................................... 38
A montagem ................................................................................................................ 53
Resultados e análise ............................................................................................................ 55
4.1
Protótipos .................................................................................................................... 55
4.1.1
Drive isolador de pulsos ...................................................................................... 55
4.1.2
Inversor e filtro .................................................................................................... 55
4.2
Circuito de controle e drive isolador de pulso ............................................................ 56
4.2.1
Circuito de controle ............................................................................................. 56
4.2.2
Drive isolador de pulso ........................................................................................ 59
4.3
Circuito do inversor ..................................................................................................... 61
5
Conclusões........................................................................................................................... 79
6
Referências bibliográficas .................................................................................................... 80
7
Apêndice.............................................................................................................................. 83
7.1
Projeto da placa de circuito impresso do drive isolador de pulso .............................. 83
7.2
Esquemático do circuito do drive isolador de pulso ................................................... 87
7.3
Esquemático do circuito completo .............................................................................. 88
Lista de siglas
PWM – Pulse Width Modulation
MOSFET – Metal-Oxide-Semiconductor Field-Effect Transistor
FPB – Filtro Passa-Baixa
FPA – Filtro Passa-Alta
FPF – Filtro Passa-Faixa
FRF – Filtro Rejeita-Faixa
PCB – Printed Circuit Board
CI – Circuito Integrado
RMS – Root Mean Square
CA – Corrente Alternada
CC – Corrente Contínua
TBJ – Transistor Bipolar de Junção
ILED – Infra-red Light-Emitting Diode
DC – Direct Current
LED – Light-Emitting Diode
SMD – Surface Mount Device
AWG – American Wire Gauge
DIP – Dual In-line Package
Vin – Tensão de alimentação
Vout – Tensão de saída
fm – Frequência da modulante
fp – Frequência da portadora
Lista de figuras
Figura 2.1 - Inversor monofásico em meia ponte .................................................................. 2
Figura 2.2 - Circuito simplificado de um inversor monofásico em ponte completa .......... 3
Figura 2.3 - Inversor com as chaves T1 e T3 conduzindo ................................................... 3
Figura 2.4 - Inversor com as chaves T2 e T4 conduzindo ................................................... 4
Figura 2.5 - Pulso quadrado e parâmetros para cálculo da razão cíclica ......................... 5
Figura 2.6 - Modulação por múltiplos pulsos a partir de uma onda quadrada.................. 5
Figura 2.7 - Modulação senoidal bipolar PWM ...................................................................... 6
Figura 2.8 - Modulação bipolar ................................................................................................. 7
Figura 2.9 - Modulação unipolar .............................................................................................. 8
Figura 2.10 - Símbolo de um FPB e sua resposta em freqüência .................................... 10
Figura 2.11 - Símbolo de um FPA e sua resposta em freqüência..................................... 11
Figura 2.12 - Símbolo de um FPF e sua resposta em freqüência .................................... 12
Figura 2.13 - Símbolo de um FRF e sua resposta em freqüência .................................... 12
Figura 2.14 - Exemplo de um FPB com um resistor e um capacitor ................................ 12
Figura 2.15 - FPB de saída para modulação bipolar .......................................................... 13
Figura 2.16 - Esquema de um transistor MOSFET ............................................................. 17
Figura 2.17 - Inversor monofásico em ponte e circuito gerador dos pulsos de controle
..................................................................................................................................................... 18
Figura 2.18 - Exemplo de um circuito optoacoplador ......................................................... 19
Figura 2.19 - Circuito do snubber .......................................................................................... 21
Figura 2.20 - Transformador com secundário aberto ......................................................... 23
Figura 2.21 - Transformador com carga no secundário ..................................................... 23
Figura 3.1 - Visão geral do circuito em diagrama de blocos.............................................. 25
Figura 3.2 - Diagrama de blocos do circuito de controle .................................................... 26
Figura 3.3 - Esquemático do circuito gerador da onda triangular ..................................... 26
Figura 3.4 - Esquemático do comparador PWM ................................................................. 28
Figura 3.5 - Circuito lógico de atraso .................................................................................... 29
Figura 3.6 - Esquemático do drive isolador de pulso .......................................................... 30
Figura 3.7 - Esquemático das quatro fontes independentes. ............................................ 34
Figura 3.8 - Caminho da corrente durante o ciclo ativo do transistor .............................. 35
Figura 3.9 - Caminho de roda livre ........................................................................................ 36
Figura 3.10 - Transformador com dois secundários ........................................................... 38
Figura 3.11 - Curva de histerese de um núcleo de ferrite .................................................. 40
Figura 3.12 - Esquemático do inversor ................................................................................. 43
Figura 3.13 - Esquemático do inversor para simulação ..................................................... 44
Figura 3.14 - Pulso PWM em M2 ........................................................................................... 45
Figura 3.15 - Pulso PWM em M1 ........................................................................................... 45
Figura 3.16 - Forma de onda da tensão de saída ............................................................... 46
Figura 3.17 - Forma de onda da corrente na saída do inversor ....................................... 46
Figura 3.18 - O circuito do snubber ....................................................................................... 47
Figura 3.19 - Configuração do filtro ....................................................................................... 49
Figura 3.20 - Esquema da montagem em bancada ............................................................ 53
Figura 4.1 - Protótipo do drive isolador de pulso ................................................................. 55
Figura 4.2 - Protótipo do inversor .......................................................................................... 56
Figura 4.3 - Triangular gerada pelo circuito utilizando o CI LM566 .................................. 56
Figura 4.4 - Triangular na entrada do comparador PWM................................................... 57
Figura 4.5 - Onda senoidal utilizada na comparação PWM .............................................. 58
Figura 4.6 - Pulsos complementares gerados pela comparação PWM........................... 58
Figura 4.7 - Cruzamento dos pulsos PWM complementares ............................................ 59
Figura 4.8 - Pulsos PWM complementares com atraso ..................................................... 59
Figura 4.9 - PWM aplicado à porta do MOSFET da fonte independente ........................ 60
Figura 4.10 - Tensão entre os terminais do transformador da fonte independente ....... 60
Figura 4.11 - Pulsos PWM obtidos na saída do drive isolador de pulso.......................... 61
Figura 4.12 - Forma da tensão de saída saturada .............................................................. 62
Figura 4.13 - Saída do inversor sem distorção para Vin = 30 V ....................................... 62
Figura 4.14 - Tensão de saída para Vin = 60 V ................................................................... 63
Figura 4.15 - Tensão de saída para Vin = 90 V ................................................................... 64
Figura 4.16 - Tensão de saída para Vin = 120 V ................................................................. 64
Figura 4.17 - Tensão de saída para Vin = 180 V ................................................................. 65
Figura 4.18 - Tensão de saída com Vin = 204 V ................................................................. 65
Figura 4.19 - Tensão de saída para fp = 100 kHz ............................................................... 67
Figura 4.20 - Tensão de saída para fp = 50 kHz ................................................................. 68
Figura 4.21 - Tensão de saída para fp = 30 kHz ................................................................. 68
Figura 4.22 - Tensão de saída com fm = 1 kHz e fp = 100 kHz ........................................ 69
Figura 4.23 - Tensão de saída com fm = 1 kHz e fp = 50 kHz .......................................... 70
Figura 4.24 - Tensão de saída com fm = 1 kHz e fp = 30 kHz .......................................... 70
Figura 4.25 - Tensão de saída com fm = 1 kHz e fp = 25 kHz .......................................... 71
Figura 4.26 - Tensão de saída com fm = 1 kHz e fp = 20 kHz .......................................... 71
Figura 4.27 - Tensão de saída com fm = 1 kHz e fp = 15 kHz .......................................... 72
Figura 4.28 - Tensão em cada um dos braços do inversor para usando modulação
bipolar ......................................................................................................................................... 74
Figura 4.29 - Tensão em cada um dos braços do inversor para usando modulação
unipolar....................................................................................................................................... 75
Figura 4.30 - Saída do inversor para modulação unipolar (fm=1kHz e fp=50kHz) ........ 75
Figura 4.31 - Saída do inversor para modulação bipolar (fm=1kHz e fp=100kHz) ........ 76
Figura 4.32 - Saída do inversor para modulação unipolar (fm=1kHz e fp=25kHz) ........ 76
Figura 4.33 - Saída do inversor para modulação bipolar (fm=1kHz e fp=50kHz) .......... 77
Figura 4.34 - Saída do inversor para modulação unipolar (fm=1kHz e fp=15kHz) ........ 77
Figura 4.35 - Saída do inversor para modulação bipolar (fm=1kHz e fp=30kHz) .......... 78
Figura 7.1 - Arquivo PCB do circuito de drive ...................................................................... 85
Figura 7.2 - Top layer ............................................................................................................... 86
Figura 7.3 - Bottom layer ......................................................................................................... 86
Lista de tabelas
Tabela 4.1 - Variação de Vin (R=1k, fm=60Hz, fp=100kHz) .............................................. 63
Tabela 4.2 - Variação da carga resistiva (Vout-rms=110V, fm=60Hz, fp=100kHz) ......... 66
Tabela 4.3 - Carga indutiva (fm=60Hz, fp=100kHz) ............................................................ 66
Tabela 4.4 - Variação de fp (Vin=60V, fm=60Hz, R=1kΩ) .................................................. 67
Tabela 4.5 - Variação de fp (Vin=60V, fm=1kHz, R=1kΩ) .................................................. 69
1 Introdução
Atualmente, com um sistema de energia elétrica consolidado - onde se
utilizam uma tensão CA na transmissão, na distribuição e consequentemente
nos pontos consumidores residenciais, comerciais e industriais – uma
crescente preocupação com a eficiência energética e uma alta demanda de
energia, torna-se cada vez mais importante o desenvolvimento dos inversores
de frequência, que são equipamentos capazes de fornecer uma tensão CA a
partir de uma alimentação em tensão CC.
Este trabalho pretende validar a teoria de que é possível diminuir as
perdas por distorção em inversores através da escolha de uma modulação
PWM adequada [1]. Para obter tal resultado, foi feita uma comparação entre
duas técnicas de modulação senoidal PWM, a bipolar e a unipolar. Devido à
complexidade de se desenvolver as duas técnicas em um único trabalho de
conclusão de curso, este trabalho desenvolveu somente a modulação senoidal
bipolar PWM, enquanto que outro trabalho desenvolveu em paralelo a
modulação senoidal unipolar PWM.
A modulação senoidal bipolar PWM gera pulsos de largura variável, de
forma que vários harmônicos podem ser eliminados devido a esta técnica de
chaveamento [1]. Contudo, para uma maior qualidade do sinal senoidal de
saída, ainda se faz necessário o uso de filtros na saída dos inversores. Outra
característica importante desta técnica de modulação senoidal PWM é que os
pares de transistores do inversor devem ter mesma frequência de
chaveamento. Inversores que utilizam técnica de comutação dos pares de
transistores em frequências diferentes são chamados de híbridos.
Para melhor entender o conceito das técnicas de modulação e dos
circuitos necessários para uma experimentação prática, foi realizada uma
revisão bibliográfica dos assuntos relevantes. Posteriormente, estão expostos
os circuitos utilizados no desenvolvimento do projeto assim como suas
descrições de funcionamento. Por fim, os resultados obtidos são mostrados,
em forma de tabelas e de gráficos, e analisados.
1
2 Revisão bibliográfica
2.1
Inversores de frequência
Inversores são conversores CC-CA, ou seja, sua função consiste em
converter uma tensão contínua (CC) aplicada em sua entrada em uma tensão
alternada (CA) simétrica, de amplitude e freqüência desejadas em sua saída.
Os inversores podem ser utilizados em muitas aplicações industriais,
como por exemplo, no acionamento de máquinas CA em velocidade variável,
em fontes auxiliares, em sistemas de energia ininterrupta, na geração de
tensão CA em NO-BREAKS e em amplificadores de áudio.
Os inversores podem ser classificados em monofásicos ou trifásicos. Os
monofásicos podem ser classificados como de meia ponte ou ponte completa.
A figura 2.1 expõe um inversor com configuração de meia ponte com uma
carga puramente resistiva.
Figura 2.1 - Inversor monofásico em meia ponte
Da figura observa-se que este inversor necessita de uma fonte CC de
três terminais e a tensão sobre os transistores quando estes não estão
conduzindo é Vs, e não apenas Vs/2.
A figura 2.2 mostra o circuito simplificado de um inversor monofásico em
ponte completa, que tem como carga um motor monofásico. Nesta
configuração o inversor é alimentado com uma fonte CC unipolar e a tensão
em cima dos transistores quando eles não estão conduzindo é igual à da fonte,
ou seja, Vin.
2
Figura 2.2 - Circuito simplificado de um inversor monofásico em ponte
completa
Ao chavear os pares de transistores T1 e T3 ou T2 e T4, potência da
fonte se transfere para o motor. A diferença entre o chaveamento dos dois
pares de transistores é que ao chavear T1 e T3 a corrente flui do ponto A para
o B na figura 2.3, fazendo o rotor girar em um sentido. Ao chavear T2 e T4, a
corrente fui de B para A, figura 2.4, fazendo o rotor girar em sentido contrário.
Figura 2.3 - Inversor com as chaves T1 e T3 conduzindo
A forma de onda da tensão CA obtida na saída de um inversor ideal é
uma senoidal, mas na prática não é possível conseguir uma senoidal perfeita,
sem a presença de harmônicos. Para obter inversores com saída senoidal, são
necessários filtros nas saídas dos pulsos para eliminar as componentes
harmônicas. Harmônicos também podem ser minimizados através de técnicas
de chaveamento. Normalmente para aplicações de baixa e média potência são
3
aceitáveis tensões de onda quadrada, enquanto que para aplicações em
potência elevada se faz necessário o uso de tensões de onda senoidal com
baixa distorção [1].
Figura 2.4 - Inversor com as chaves T2 e T4 conduzindo
É possível obter a tensão CA na saída de duas formas [1]:
1. Variando-se a amplitude da tensão CC de entrada sem variar o ganho
do inversor;
2. Se a tensão de entrada não puder se controlada, varia-se o ganho do
inversor através do controle modulação por largura de pulso (Pulse
Width Modulation – PWM).
2.2
A modulação PWM - Pulse Width Modulation
A modulação PWM baseia-se na variação da largura dos pulsos, que
são gerados através da comparação de um sinal analógico com um sinal de
referência, geralmente uma onda triangular ou dente-de-serra.
A variação da largura de um pulso é feita variando-se o tempo em que o
pulso permanece em nível alto. A relação entre o tempo em que o pulso está
em nível lógico alto e o período total do pulso é chamada de razão cíclica (D),
que está definida pela equação abaixo [4]:
D = t(on) / T
(2.1)
Na equação 2.1 t(on) é o tempo em que o pulso permanece em nível alto
e T é o período total do pulso, como exemplificado na figura 2.5.
4
Figura 2.5 - Pulso quadrado e parâmetros para cálculo da razão cíclica
Como visto na figura 2.5, a forma de onda gerada pela modulação PWM
tem somente dois estados, um nível alto e um nível baixo, assim, as chaves
disparadas por esta forma de onda comutarão apenas entre esses dois estados
Normalmente o sinal analógico utilizando na comparação que gera os
pulsos PWM ou é uma onda quadrada ou uma onda senoidal. No caso do uso
de ondas quadradas, o sinal modulado pode possuir um ou múltiplos pulsos por
semiciclo, conforme a freqüência da onda quadrada. Porém, estes pulsos
possuem mesma largura ou razão cíclica [1]. A figura 2.6 demonstra as
características citadas dos pulsos da modulação por largura de pulsos
múltiplos.
Figura 2.6 - Modulação por múltiplos pulsos a partir de uma onda
quadrada
No caso da modulação PWM senoidal, o sinal analógico é uma onda
senoidal e a largura de cada um dos pulsos do sinal modulado é variada em
proporção à amplitude da onda senoidal. A vantagem da comparação com uma
5
senoidal é que o fator de distorção e os harmônicos de mais baixa ordem são
reduzidos significativamente [1].
Para obter a modulação PWM senoidal normalmente são utilizados um
gerador de onda triangular e um gerador de onda senoidal. Estas duas ondas
são aplicadas em um dispositivo comparador, como por exemplo, um
amplificador operacional, e na sua saída resultam os pulsos modulados. O sinal
analógico ou modulante (onda senoidal) é aplicado na porta não-inversora do
comparador, enquanto que o onda de referência ou portadora (onda triangular)
entra na porta inversora. Quando o nível da onda senoidal for maior que o da
onda triangular, a saída satura em +Vcc. Caso contrário a saída terá nível
baixo. A figura 2.7 exemplifica esta operação.
Figura 2.7 - Modulação senoidal bipolar PWM
A escolha do sinal de referência é outro ponto importante, pois a forma
de onda utilizada na modulação determina a quantidade de conteúdo
harmônico. Sabe-se, de [4], que ondas triangulares são preferíveis às ondas
dentes de serra porque sua simetria fornece menos componentes harmônicos.
Existem dois tipos de esquemas para gerar a modulação PWM senoidal,
a modulação bipolar e a modulação unipolar.
6
2.2.1 A modulação bipolar
Este esquema apresenta saída diferencial com um braço defasado em
180º (graus) do outro, como mostra a figura 2.8. Enquanto o braço A é a própria
saída do comparador o braço B passa por uma porta inversora. Com esta
configuração são obtidas as formas de onda complementares que são
aplicadas em cada um dos braços do inversor. A amplitude de cada um dos
pulsos varia de um valor de referência 0 (zero) até ao valor +Vcc. Assim, a
saída diferencial, neste caso de um inversor, apresenta dois níveis de saída,
+Vcc e -Vcc, justificando o nome bipolar.
A figura 2.8, retirada de [5], mostra o esquema de geração da modulação
bipolar. Ao utilizar este tipo de modulação, para obter a forma de onda da
tensão diferencial explicitada, as chaves do inversor devem comutar com
mesma frequência.
Figura 2.8 - Modulação bipolar
7
2.2.2 A modulação unipolar
Na modulação unipolar a tensão diferencial de saída varia entre três
níveis de tensão, 0V –Vcc e +Vcc. Para conseguir essa variação na saída do
inversor, é possível usar uma chave de cada par (T1 ou T3 e T2 ou T4) mais
lentas. Neste caso uma chave, por exemplo, T1, ficará conduzindo
continuamente em meio ciclo e no semiciclo seguinte quem conduzirá
continuamente, por exemplo, será T2. Desta forma, a frequência de comutação
de T1 e T2 será a mesma da onda senoidal, enquanto que a freqüência de
comutação de T3 e T4 será igual à da onda triangular de referência [5]. A figura
2.9 exemplifica a geração dos pulsos para a modulação unipolar.
Comparando as figuras 2.8 e 2.9, percebe-se algumas diferenças claras
entre os dois tipos de modulação. Na modulação bipolar nota-se a existência
de uma saída diferencial com dois níveis de tensão e uma saída de modo
comum constante. Já para a modulação unipolar a saída diferencial apresenta
três níveis de tensão e a saída de modo comum é variável e também tem três
níveis.
Figura 2.9 - Modulação unipolar
8
2.2.3 O índice de modulação (M)
De [5], define-se índice de modulação (M) como:
M = Δf / fm
(2.2)
Na equação 2.2, Δf é a diferença entre a frequência da onda portadora
(fp) e a frequência da onda modulante e fm é a frequência da onda modulante.
Portanto, para se obter altos índices de modulação é necessário que a
frequência da onda portadora seja elevada e maior que a frequência da
modulante.
Em [4], observa-se que na modulação senoidal bipolar PWM os
harmônicos presentes no sinal modulado são da ordem de grandeza do índice
de modulação. Portanto, para este tipo de modulação alcançar resultados
satisfatórios é necessário utilizá-la com altos índices de modulação, ou seja,
com altos valores de frequência para a portadora [5], o que facilita a ação dos
filtros de saída.
2.3
Filtros
Em vários tipos de aplicações é interessante mudar a amplitude das
componentes de frequência em um sinal ou eliminar por completo algumas
amplitudes de determinadas frequências. O processo que realiza essas
funções chama-se filtragem. Sistemas lineares invariantes no tempo que
mudam a forma do espectro são conhecidos como filtros modeladores de
frequência (do inglês frequency-shaping filters) enquanto que os sistemas que
são desenvolvidos para permitir a passagem sem distorção de algumas
freqüências essenciais e atenuar ou eliminar outras frequências são
conhecidos como filtros seletores de frequência (do inglês frequency-selective
filters) [6].
Uma aplicação onde os filtros modeladores de frequência são
comumente encontrados é em sistemas de áudio. Eles são utilizados para
permitir ao usuário modificar as quantidades relativas da energia de baixa
frequência (bass) e de alta frequência (treble). Esse tipo de filtro também é
usado em sistemas de áudio de alta fidelidade, onde são chamados de
equalizadores e são normalmente incluídos no circuito de pré-amplificação para
compensar as características da resposta de auto-falantes [6].
9
Os filtros seletores de frequência foram desenvolvidos para selecionar
ou rejeitar determinadas faixas de frequência com acurácia. Um exemplo típico
de aplicação ocorre quando os ruídos em gravações de áudio estão em uma
freqüência mais elevada que a da música ou da voz, sendo possível removêlos com um filtro que selecione apenas as frequências mais baixas. Os filtros
que selecionam as frequências mais baixas ou rejeitam as mais altas são
conhecidos como filtros passa-baixa (FPB). A figura 2.10 mostra seu símbolo
assim como o comportamento da sua resposta em frequência.
Observando o gráfico da resposta em freqüência de um FPB é possível
definir um conceito muito utilizado, o da frequência de corte. Na figura 2.10,
percebe-se que o filtro responde até um determinado valor de frequência e que
valores acima daquela frequência são rejeitados. Essa frequência que está no
limite entre a região selecionada e a atenuada é conhecida como frequência de
corte.
Figura 2.10 - Símbolo de um FPB e sua resposta em freqüência
Um filtro passa alta (FPA) apresenta uma resposta inversa ao de um
FPB. Ele seleciona as frequências elevadas e atenua as mais baixas. Na figura
2.11 visualiza-se a simbologia utilizada para representá-los e as características
da sua reposta em frequência.
10
Figura 2.11 - Símbolo de um FPA e sua resposta em freqüência
Um filtro passa faixa (FPF), figura 2.12, seleciona uma banda de
frequência e atenua as freqüências superiores e inferiores a essa banda. Neste
caso existem duas frequências de corte, que definem os limites inferior e
superior da seleção. O filtro rejeita faixa (FRF), figura 2.13, é semelhante ao
FPF, porém um FRF atenua as frequências dentro da faixa selecionada e
responde às frequências superiores e inferiores aos limites determinados.
Os filtros seletores de freqüência são amplamente implementados
utilizando-se de circuitos elétricos [6]. Um dos exemplos mais simples é o FPB
composto de um resistor e um capacitor, como mostra a figura 2.14. Como a
impedância capacitiva é inversamente proporcional à freqüência [6,8], o
capacitor é visto como um curto circuito pelas altas frequências e como uma
impedância infinita pelas baixas frequências, selecionando as baixas
frequências.
De um modo geral, filtros que são implementados com capacitores,
indutores e resistores são conhecidos por filtros passivos e são assim
chamados porque a faixa do sinal selecionado não sofre nenhum tipo de
amplificação. Já os filtros ativos, que são comumente formados por
amplificadores operacionais, selecionam a faixa de frequência desejada e
ainda são capazes de amplificar o sinal filtrado [7].
11
Figura 2.12 - Símbolo de um FPF e sua resposta em freqüência
Figura 2.13 - Símbolo de um FRF e sua resposta em freqüência
Figura 2.14 - Exemplo de um FPB com um resistor e um capacitor
12
2.3.1 Filtro de saída do inversor
Como o princípio da modulação PWM é amostrar um sinal analógico
através da variação de ton, a quantidade de harmônicas necessárias para
representar o sinal de saída é grande [4]. Para tentar eliminar essas
componentes indesejadas e recompor o sinal original, se faz necessário o uso
de um filtro.
Como o PWM é gerado a uma freqüência de pelo menos 100kHz e a
freqüência do sinal desejada na saída do inversor é de 60Hz, utiliza-se um filtro
do tipo passa-baixa (FPB).
Normalmente, não é recomendado utilizar um filtro passa-baixa simples,
formado por um indutor e um capacitor. Recomenda-se a utilização de um filtro
com pelo menos dois pólos, para reduzir a emissão de radiação
eletromagnética e também para evitar que o filtro produza picos excessivos de
tensão [5]. Assim, a configuração de filtro utilizada, que é suficiente para a
aplicação em inversores com modulação PWM bipolar, contém dois indutores e
cinco capacitores e está exposta na figura 2.15.
Figura 2.15 - FPB de saída para modulação bipolar
Na figura, utilizando-se do teorema de Thevenin [8], observa-se que o
filtro é formado por quatro capacitores que são vistos em paralelo pela carga,
um capacitor em paralelo com a carga e dois indutores em série a carga.
Para efeito de projeto, a frequência de corte deste filtro é determinada
pela equação 2.3, de [5]:
13
Onde, da figura 2.15:
L = L1 + L2;
C = C1//C2//C3//C4;
Observa-se que o capacitor C5 não entra no cálculo da capacitância
equivalente porque a carga não o enxerga em paralelo com os demais. O valor
de C5 utilizado na prática, de [5], é igual ao de C1, C2, C3 e C4.
Substituindo as expressões para L e C na equação anterior, obtém-se:
As expressões para L e C são obtidas aplicando o equivalente Thevenin
em cima da carga. Lembrando que para fazer esta análise, a fonte de tensão
deve ser considerada aterrada [8].
A função de transferência de um filtro passa-baixa é dada pela equação
2.5 enquanto que a função de transferência de um filtro de segunda ordem está
expressa na equação 2.6.
Comparando a equação 2.5 com a equação 2.6 encontram-se algumas
equivalências, como:
14
O fator Q é muito importante porque causa uma influência determinante
na resposta em frequência do filtro. Um valor de Q recomendado para se obter
boas respostas utilizando filtro de Butterworth é 0,707. Devido às suas
características de banda suave e resposta de fase, é recomendada a utilização
de um filtro Butterworth de segunda ordem [5]. Os valores de capacitância e
indutância podem ser encontrados com as fórmulas abaixo:
Determinados os valores para os capacitores e para os indutores, devese determinar o valor da frequência de corte. Um valor recomendado para a
frequência de corte é o de uma década a menos do que o valor da frequência
de chaveamento [5].
2.4
Diodos de potência
Os diodos de potência tem funcionamento e construção similar ao dos
diodos comuns, sendo constituídos de uma junção pn e possuindo dois
terminais, o anodo e o catodo. Eles apresentam maior capacidade de potência,
porém possuem resposta em frequência menor [1].
Dependendo das características de recuperação e das técnicas de
fabricação, os diodos de potência podem ser classificados em três categorias:
diodos padrão ou genéricos, diodos de recuperação rápida e diodos Schottky.
Neste trabalho foram utilizados diodos de recuperação rápida e, por este
motivo não serão abordados com mais detalhes os outros dois tipos existentes.
Diodos de recuperação rápida apresentam um tempo de recuperação
normalmente menor que 5μs. Eles são amplamente utilizados em circuitos
conversores CC-CC e CC-CA, nos quais a velocidade de recuperação tem
15
sempre importância crítica [1]. Esses diodos cobrem faixas de correntes de
menos de 1 A a centenas de amperes, com especificações de tensões de 50 V
a aproximadamente 3000 V.
2.5
Transistores de potência
Transistores de potência possuem características de entrada em
condução e de corte controladas. Eles são utilizados como elementos de
chaveamento e são operados na região de saturação, resultando em uma
baixa queda de tensão quando está em condução [1].
Atualmente existem transistores de potência com altas velocidades de
chaveamento e, por isso, são muito empregados em conversores CC-CC e CCCA. Uma característica importante destes componentes é que possuem diodos
conectados em antiparalelo para fornecer fluxo bidirecional de corrente.
Os transistores de potência geralmente são classificados em quatro
categorias:
1. transistores bipolares de junção (TBJ’s);
2. transistores de efeito de campo de semicondutores de metal sobre
óxido (do inglês metal-oxide-semiconductor field-effect transistors –
MOSFET’s);
3. transistores de indução estática;
4. transistores bipolares de porta isolada.
Neste trabalho foram utilizados transistores de potência do tipo
MOSFET, por isso só será feita uma abordagem mais detalhada destes
transistores.
2.5.1 Transistores MOSFET
Ao contrário dos TBJ’s, que são controlados por corrente, um MOSFET
de potência é controlado por tensão, exigindo apenas uma ínfima corrente de
entrada [2]. Eles apresentam uma alta velocidade de chaveamento, com
tempos de chaveamento da ordem de nanossegundos. Devido à essas
características, esse componentes estão sendo amplamente utilizados em
conversores de alta freqüência e baixa potência [1].
16
Existem dois tipos de MOSFET’s, os de depleção e os de enriquecimento.
Para mostrar os do tipo depleção, considera-se um MOSFET de depleção de
canal n, que são formados por um substrato de silício do tipo p, com dois
silícios n+ fortemente dopados para conexões de baixa resistência. Possuem
três terminais, chamados de porta, dreno e fonte [1,2]. Como mostra a figura
2.16, a porta é isolada do canal por uma fina camada de óxido de silício.
Figura 2.16 - Esquema de um transistor MOSFET
Também é possível perceber através da figura que uma tensão é
aplicada entre os terminais de porta e fonte (VGS). Se VGS for negativa, alguns
elétrons na área do canal n serão repelidos e uma região de depleção será
criada abaixo da camada de óxido, resultando em um canal efetivo mais
estreito. Se VGS for negativo o suficiente, o canal será completamente fechado,
oferecendo uma grande resistência entre o dreno e a fonte de forma que não
haverá fluxo de corrente entre esses dois terminais. Se V GS for positivo, o
canal torna-se mais largo e a corrente entre o dreno e a fonte aumenta devido
à diminuição da resistência entre esses terminais [1,2].
2.6
Isolação das excitações da base e da porta
Para operar transistores MOSFET’s de potência como chaves, uma
apropriada tensão de porta tem de ser aplicada para excitá-los de modo que
saturem e tenham uma pequena queda de tensão quando estiverem
conduzindo.
A tensão de controle deve ser aplicada entre os terminais de porta e
fonte. Os inversores, assim como os circuitos conversores de potência em
17
geral, requerem múltiplos transistores e cada um deles deve ser excitado
individualmente.
A figura 2.17 mostra um inversor monofásico em ponte completa e o
circuito gerador dos pulsos de controle que são aplicados nas portas dos
MOSFET’s.
Figura 2.17 - Inversor monofásico em ponte e circuito gerador dos pulsos
de controle
O inversor é alimentado pela tensão CC Vs com o terminal terra T
enquanto que o circuito gerador lógico está conectado ao terminal terra C. Os
pulsos gerados pelo circuito lógico devem ser aplicados entre os terminais de
porta e fonte dos MOSFET’s. Os MOSFET’s 2 e 4 estão com suas fontes
conectadas no mesmo referencial do gerador lógico, porém os MOSFET’s 1 e 3
não estão. Para esses pulsos poderem ser aplicados nestes dois transistores, é
necessário que haja uma isolação e uma interface entre o circuito lógico e os
transistores de potência [1]. Para isso existem duas maneiras de se isolar os
sinais de controle, que devem ser aplicados na porta, em relação ao terra, ou
utilizando transformadores de pulso ou optoacopladores.
Os optoacopladores são construídos em CI’s, o que os torna muito
menores que os transformadores de pulso, e alguns modelos tem capacidade
de operar em altas freqüências.
2.6.1 Optoacopladores
Os optoacopladores combinam um diodo emissor de luz infravermelha
(do inglês infra-red light-emitting diode – ILED) e um fototransistor de silício. O
18
sinal de entrada é aplicado ao ILED e a saída é obtida através do fototransistor.
A figura 2.18 expõe um exemplo de optoacoplador:
Figura 2.18 - Exemplo de um circuito optoacoplador
Como a transmissão do sinal é feita pelo ILED e pelo fototransistor, a
saída de um optoacoplador é isolada eletricamente da sua entrada.
2.7
Proteção de dispositivos e circuitos
Em circuitos de potência, como em conversores CC-CC e em inversores,
é normal ocorrerem tensões transitórias, que são causadas principalmente pelo
chaveamento em alta freqüência na presença de indutâncias [4]. Mesmo em
circuitos detalhadamente projetados, as condições de curto circuito podem
ocorrer, causando um fluxo excessivo de corrente através dos componentes.
A operação confiável de conversores requer a certeza de que todos os
tempos e condições do circuito não excedam às especificações de potência
dos
dispositivos,
necessitando
de
proteção
contra
sobretensões,
sobrecorrentes e sobre aquecimento.
2.7.1
Dissipadores
Devido às perdas de chaveamento e durante o período de condução, é
gerado calor dentro do dispositivo de potência [1]. Esse calor deve ser
transferido do dispositivo para manter a temperatura de operação deles dentro
de uma faixa especificada. Em um resfriamento médio, o calor tem de fluir do
dispositivo para o encapsulamento e depois do encapsulamento para um
dissipador de calor.
19
Uma ampla variedade de dissipadores de alumínio está disponível
comercialmente e eles utilizam paletas de resfriamento para aumentar a
capacidade de transferência do calor.
A área de contato entre o dispositivo e o dissipador é muito importante
para minimizar a resistência térmica entre o encapsulamento e o dissipador. As
superfícies devem ser chatas, lisas e livres de sujeira, corrosão e oxidações.
Normalmente são aplicadas pastas de silicone para melhorar a capacidade de
transferência de calor e para diminuir a formação de óxidos e corrosões.
2.7.2 O circuito de snubber
Os snubbers são implementados para amortecer as oscilações de alta
freqüência geradas durante os processos de comutação em circuitos de
potência, como em conversores CC-CC ou CC-CA. Essas oscilações são
geradas devido às indutâncias parasitas e às capacitâncias intrínsecas
existentes nos semicondutores e nas trilhas [4].
Na prática, os snubbers servem para evitar picos elevados de tensão,
que são causados pelas oscilações em alta freqüência, nos semicondutores,
evitando uma possível queima dos mesmos. Recomenda-se, portanto, o uso de
snubbers em todos os semicondutores em circuitos de potência [4].
Como os snubbers dissipam uma potência baixa e utilizam poucos
componentes com tamanho reduzido, sua implementação na placa de circuito
impresso não acarreta em grande ocupação de espaço, possibilitando sua
montagem ser bem próxima ao componente semicondutor.
Para dimensionar os componentes do snubber, primeiro determina-se a
potência (P) a ser dissipada no resistor. A partir deste valor e do valor máximo
de tensão aplicado sobre o MOSFET (Vmáx), é possível determinar o valor da
resistência do snubber (Rsnubber):
O dimensionamento do capacitor é feito considerando um fator de
descarga do capacitor de 90%:
20
Isolando C, encontra-se:
Onde:
;
R é o valor da resistência do snubber;
C é o valor da capacitância do snubber;
t é o tempo necessário para o capacitor descarregar até atingir
90% da carga inicial.
Com essas equações e com o tempo de carga e descarga do capacitor
sendo determinados em função da freqüência de operação do inversor, é
possível projetar o circuito de snubber, que está representado na figura 2.19.
Figura 2.19 - Circuito do snubber
2.8
Transformadores
Um transformador é formado por dois ou mais enrolamentos acoplados
por um fluxo magnético. Se um desses enrolamentos, o primário, é conectado
em uma fonte de tensão alternada, um fluxo alternado será produzido e sua
amplitude dependerá da tensão aplicada, da freqüência desta tensão e do
número de espiras. O fluxo mútuo também estará vinculado ao outro
enrolamento, o secundário, onde induzirá uma tensão cujo valor dependerá do
21
número de espiras no secundário, da magnitude do fluxo mútuo e da
freqüência [3].
A essência do funcionamento de um transformador requer apenas a
existência de um fluxo mútuo variante no tempo interligando dois enrolamentos.
Este processo poderia ocorrer através de um acoplamento através do ar, mas o
acoplamento entre os enrolamentos é mais efetivo usando um núcleo de ferro
ou outro material ferromagnético porque o fluxo fica confinado em uma
trajetória
definida
e
com
alta
permeabilidade
que
conecta
os
dois
enrolamentos.
O núcleo de pequenos transformadores usados em circuitos de
comunicação com alta freqüência e baixo nível de energia é feito de
compressas de materiais ferromagnéticos, também conhecidos como ferrite.
Da condição sem carga, ou com o secundário aberto, figura 2.20, de um
transformador deduz-se a equação para a força eletro motriz induzida no
enrolamento primário. Nesta configuração, uma pequena corrente, chamada de
corrente de excitação, flui através do primário e estabelece um fluxo alternado
no circuito magnético, que, por sua vez, induz uma força eletro motriz e 1 igual à
[3]:
Onde:
λ1 é o fluxo acoplado no enrolamento primário;
φ é o fluxo através do núcleo, que acopla ambos enrolamentos;
N1 é o número de espiras no enrolamento primário.
22
Figura 2.20 - Transformador com secundário aberto
Para a análise da condição com carga, figura 2.21, considera-se as
características de um transformador ideal. Em um transformador ideal as
resistências dos enrolamentos são desprezíveis, não há dispersão do fluxo, isto
é, todo fluxo está confinado no núcleo, não existem perdas de energia no
núcleo e a permeabilidade do núcleo é tão alta que uma mínima força magneto
motriz é necessária para estabelecer o fluxo [3].
Figura 2.21 - Transformador com carga no secundário
Considerando essas definições, pode-se afirmar que uma tensão
aplicada nos terminais de primário é igual à força eletro motriz induzida pelo
fluxo mútuo. Também pode ser dito que a tensão induzida no enrolamento
secundário é igual à tensão medida nos seus terminais.
Matematicamente, de [3]:
23
Das equações 2.16 e 2.17, é possível encontrar que:
Em um transformador ideal, pode-se afirmar que a potência instantânea
aplicada no primário é igual à potência instantânea de saída no secundário [3].
Assim:
Então, a tensão é transformada com uma proporção direta ao número de
espiras em seus enrolamentos, enquanto que a corrente é transformada com
uma proporção inversa ao número de espiras dos enrolamentos.
Transformadores também são usados para transferir impedâncias, assim
como tensão e corrente, de um enrolamento para o outro. A equação 2.21,
usada para referir impedâncias, mostra que elas são transformadas na
proporção do quadrado da relação do número de espiras.
24
3 Desenvolvimento prático
3.1
O sistema proposto
Para facilitar o entendimento do trabalho como um todo, ele foi dividido
em três partes, onde cada uma tem uma função diferente. O diagrama de
blocos abaixo mostra cada uma delas.
Circuito de
controle
Isolação dos
pulsos PWM
Circuito de
potência
Figura 3.1 - Visão geral do circuito em diagrama de blocos
A primeira etapa consiste da modulação PWM senoidal do tipo bipolar.
Estão presentes aqui o circuito que gera a onda triangular e o circuito que faz a
comparação entre as ondas triangular e senoidal.
A segunda etapa funciona basicamente como uma interface entre o
circuito gerador dos pulsos PWM e o circuito de potência e será mais bem
detalhada, assim como as outras duas etapas, posteriormente.
A terceira e última etapa abrange o circuito de potência. Nela estão
incluídos o circuito do inversor e os seus circuitos auxiliares como filtro e
snubber.
3.2
1ª etapa – Circuito de controle
A etapa onde é implementada a modulação bipolar senoidal PWM
consiste de três circuitos distintos, que são o circuito gerador da onda
triangular, o circuito comparador PWM e um circuito de atraso que garante que
os pulsos complementares estejam atrasados o suficiente para não conduzirem
simultaneamente os dois MOSFET’s do mesmo braço.
25
Gerador da
triangular
Comparador
PWM
Circuito de
atraso
Figura 3.2 - Diagrama de blocos do circuito de controle
3.2.1 O gerador de onda triangular
O circuito utilizado foi implementado utilizando o CI LM566, que é um
gerador de funções (onda quadrada e triangular), e seu esquemático está
exposto na figura 3.3.
V1
12Vdc
R1
22k
SET = 0.5
0
6V
C1
47p
U1
5
6
7
MOD
TRES
TCAP
SQWOUT
TRWOUT
3
4
C4
3
47u
LM566C
C2
2.2n
2
TRIANG
+
1
-
OUTPAD
11
R2
10k
SET = 0.5
U2A
TL074A
4
C3
5.6n
R3
100k
0
0
Figura 3.3 - Esquemático do circuito gerador da onda triangular
Neste trabalho foi utilizada somente a onda triangular proveniente deste
circuito (porta quatro) e sua frequência foi estabelecida como 100 kHz, que é a
frequência de chaveamento definida para os MOSFET’s do inversor. Para obtêla, utiliza-se a relação abaixo [9]:
Onde:
V+ é tensão de alimentação do CI;
V5 é a tensão aplicada na porta cinco do CI;
26
R0 é o resistor de tempo (do inglês timing resistor), usado para
determinar a frequência das ondas;
C0 é o capacitor de tempo (do inglês timing capacitor), usado para
determinar a frequência das ondas;
Para obter a frequência de 100 kHz usou-se um trimpot de 10kΩ (R2)
para R0, possibilitando um ajuste de frequência conforme a variação da
resistência. Outro parâmetro de ajuste da frequência é V 5 e para controlá-la
usou-se um divisor de tensão entre a alimentação e a porta cinco usando um
potenciômetro (R1).
Como será mostrado adiante, o CI utilizado como comparador é um
LM318, que deve ser alimentado preferencialmente por uma tensão simétrica
[11], ou seja, +Vcc e –Vcc. Neste trabalho o LM318 foi alimentado por uma
tensão assimétrica para reduzir o número de fontes utilizadas. Assim, na porta
destinada para +Vcc foi aplicada uma tensão de 12 V enquanto que a porta
-Vcc foi conectada no referencial terra (0 V).
Para simularmos uma configuração de simetria, na saída da onda
triangular, porta quatro, colocou-se um capacitor para filtrar o nível DC do sinal
gerado pelo LM566 e em seguida adicionou-se um nível DC de 6 V. Por fim, a
onda triangular já deslocada de 6 V foi aplicada em um seguidor de tensão e
sua saída conectada ao circuito comparador.
3.2.2 O comparador PWM
Para gerar o pulso PWM foi feita a comparação da onda triangular,
gerada no circuito com o CI LM566, com uma onda senoidal em 60 Hz de um
gerador de funções de bancada. A figura 3.4 mostra o esquemático do circuito
implementado para este fim.
Na entrada TRIANG é conectada a saída do circuito gerador da onda
triangular. O amplificador operacional U16B, um TL074, é utilizado para
condicionar a onda triangular de modo que possamos ajustá-la para obtenção
da melhor comparação com a onda senoidal. Para isso utilizam-se os
potenciômetros R35 e R34.
27
R35
10k
12V
12V
0
TRIANG
R33
6
3.3k
INPAD
U16B
TL074A
4
5
+
R11
1k
3
-
R10
10K
11
R34
10k
2
R30
1k
0
U17
LM318
7 5
7
PAD1
+
6
-
OUTPAD
4 8 1
0
0
12V
12V
R31
1k
6V
C13
47u
R36
100k
4
3
+
2
-
V6
VOFF =
VAMPL =
FREQ = 60Hz
U16A
TL074A
1
2
R32
1k
PAD2
+
6
-
OUTPAD
4 8 1
11
0
U18
LM318
7 5
3
0
0
Figura 3.4 - Esquemático do comparador PWM
Através do potenciômetro R34 é possível ajustar o ganho do estágio
amplificador, variando os valores da tensão de pico a pico da onda triangular na
saída. O potenciômetro R35 ajusta o nível DC da triangular na saída ao variar
sua resistência entre a alimentação e a porta não inversora do amplificador
operacional.
A onda senoidal também é deslocada de 6 V para poder ser comparada
com a onda triangular e seus ajustes de amplitude e frequência são alterados
diretamente no gerador de funções.
Os amplificadores operacionais U17 e U18, ambos são LM318, são
responsáveis pela comparação entre as duas ondas, triangular e senoidal, que
gera o pulso PWM. Para gerar os pulsos complementares que serão aplicados
às chaves do inversor, cada LM318 faz uma comparação diferente. Enquanto
um recebe a triangular na sua porta inversora, o outro a recebe na sua porta
não-inversora. O mesmo procedimento se repete para a onda senoidal. Desta
forma, as duas saídas, PAD1 e PAD2, já estão defasadas de 180º uma em
relação à outra.
28
3.2.3 O circuito de atraso
Antes dos pulsos serem aplicados no drive e consequentemente nos
transistores do inversor, é necessário garantir que os dois MOSFET’s do
mesmo braço não conduzam simultaneamente, pois isso causaria um curto
circuito na fonte de alimentação do inversor, levando a uma sobrecorrente que
pode danificar os componentes do inversor, principalmente os MOSFET’s.
Para evitar este problema foi implementado um circuito lógico, que está
localizado entre a saída do comparador e o drive isolador de pulsos. Seu
esquemático é apresentado na figura 3.5.
U15A
4081
PAD1
1
PWM1
3
INPAD
2
OUTPAD
R28
10k
C11
4049
U14A
2
0
1
47p
C12
R29
10k
0
4049
U14B
4
3
47p
U15B
4081
4
PAD2
PWM2
6
5
OUTPAD
INPAD
Figura 3.5 - Circuito lógico de atraso
Para entender melhor o funcionamento deste circuito considera-se a
situação em que a entrada PAD1 receba um sinal de nível lógico baixo. Assim,
a saída da porta AND U15A (HEF4081B) também receberá nível lógico baixo, o
que, ao passar pela porta inversora, ativa a multiplicação da porta AND U15B
(HEF4081B). Percebe-se que a multiplicação em uma porta só é ativada
quando o pulso PWM aplicado à outra está em nível baixo, garantindo que os
pulsos complementares não estejam em nível lógico alto ao mesmo tempo, o
que teoricamente sanaria os problemas mencionados.
Porém, a resposta dos transistores MOSFET’s é mais lenta e mesmo
assim eles ainda podem conduzir simultaneamente. Para resolver isto, foi
29
colocado um circuito RC (capacitores C11 e C12, potenciômetros R28 e R29)
na saída das portas inversoras U14A e U14B (HEF4049B). A constante de
tempo no carregamento do capacitor varia conforme os valores de resistência e
capacitância utilizados. Usando um potenciômetro torna-se então possível
ajustar o atraso de um pulso com relação ao outro através da variação da
resistência e calibrar um melhor ponto para o funcionamento do inversor
quando a corrente fornecida pela fonte e exigida pelo mesmo seja a menor
possível.
Ao atender às condições impostas, as saídas PWM1 e PWM2, que são
complementares, podem ser aplicadas às entradas do drive isolador de pulsos
e suas saídas podem ser conectadas aos gates dos MOSFET’s do inversor.
3.3
2ª etapa – Isolação dos pulsos PWM
3.3.1 O drive isolador de pulso
Para o acionamento correto das chaves do inversor não se deve aplicar
diretamente os pulsos PWM nos gates dos MOSFET’s. É necessário fazer um
condicionamento desses pulsos antes de utilizá-los para adequar seu nível de
tensão de acordo com os limites aceitos pelas chaves do inversor.
O circuito utilizado para fazer este tratamento dos pulsos PWM utiliza
optoacopladores e será referenciado neste trabalho como drive isolador de
pulso. Seu esquemático encontra-se na figura 3.6.
Figura 3.6 - Esquemático do drive isolador de pulso
30
O circuito do drive isolador de pulso atua como uma interface entre o
circuito de potência e o circuito de controle. Além de fazer o tratamento do sinal
PWM para que ele possa ser aplicado com uma amplitude apropriada à
suportada pelos gates dos transistores, ele faz o isolamento dos pulsos para
que cada MOSFET do inversor tenha um referencial independente, permitindo
que eles sejam disparados individualmente.
3.3.2 O funcionamento do drive isolador de pulsos
O primeiro estágio deste circuito consiste de um acoplador óptico ou
optoacoplador, que neste caso foi escolhido o circuito integrado (CI) 6N137
devido à alta velocidade de resposta dos seus fotodiodos, o que evita a
deformação da onda de saída para altas freqüências de trabalho.
O 6N137 recebe o sinal proveniente da primeira etapa, circuito de
controle, em sua entrada (porta 2). Internamente o CI possui um diodo emissor
de luz (LED) e um fotodiodo [14]. O fotodiodo é sensível à luz, ou seja, quando
o LED está conduzindo ele emite uma luz que, detectada pelo fotodiodo o faz
conduzir também. Como o acionamento do fotodiodo é feito através da sua
sensibilidade à luz e não através de uma ligação elétrica e a alimentação do
6N137 é feita por uma fonte com referencial terra independente, pode-se
afirmar que sua saída está isolada eletricamente da sua entrada.
Outro ponto importante para o entendimento deste circuito são os
diodos zener. O diodo zener (Z5) conectado à porta 8 do 6N137 possui tensão
de polarização reversa de 5,1V e serve para limitar a tensão de alimentação do
CI neste valor, já que o mesmo não aceita valores superiores de tensão. Os
outros dois diodos zener, Z6 e Z7, conectados às portas 6 e 5 respectivamente,
alteram as tensões de referência da saída do opto acoplador. Analisando
internamente o CI 6N137, verifica-se que quando o transistor intrínseco ao CI
conduz, o pino de saída (pino 6) recebe a tensão de polarização reversa do
diodo zener Z7, que é de 3,6V. Quando este mesmo transistor não está
conduzindo, a tensão forçada na saída do CI é a soma das tensões de
polarização reversa dos diodos zener Z6 e Z7. Sendo o valor desta tensão para
Z6 de 6,8V, a amplitude na saída é de 10,4V (3,6V + 6,8V). Sem os diodos
zener, a tensão de saída variaria entre 0V e 5V, e, com eles, ela varia de 3,6V a
31
10,4V. Este incremento dos valores de saída ajuda na excitação do CI CD4049
[15, 16].
Dentro do opto acoplador, em série com o fotodiodo, existe uma porta
inversora que defasa o sinal de entrada em 180º. Por isso foi necessário
implementar um estágio inversor depois do optoacoplador. Assim, ao defasar
novamente a onda em 180º, ela voltará a ficar em fase com o pulso de entrada.
Este estágio inversor foi implementado utilizando o CI CD4049A (SMD) porque
ele possui em seu interior seis portas inversoras, e, ao conectá-las em paralelo,
a corrente que passa em cada inversora é reduzida.
O último estágio do drive isolador de pulso consiste de dois transistores
bipolares, um NPN e outro PNP, que estão conectados com seus emissores em
comum. O BC337 (NPN) tem seu coletor conectado à fonte de alimentação
(Vcc) enquanto que o BC327 (PNP) tem seu coletor conectado ao referencial
terra. Desta forma, quando o pulso PWM é aplicado na base destes
transistores, que também estão ligadas em comum, eles irão atuar como um
amplificador. Durante o ciclo ativo do pulso, o transistor NPN conduz enquanto
que o transistor PNP está aberto, fazendo com que a tensão de saída seja Vcc.
Durante o outro período do pulso, o transistor PNP conduz e o NPN abre,
jogando a tensão de referência na saída.
Para garantir que a parte negativa do pulso PWM na saída seja
interpretada como nível lógico baixo, foi colocado um capacitor em paralelo
com o diodo zener Z7, de 3,6V, e, este capacitor foi conectado ao pino negativo
da tensão de saída. Assim, quando o transistor PNP conduz e o pino positivo
da saída recebe o valor da tensão de referência (terra), a diferença de potencial
entre os terminais da saída será negativa, pois estaremos tomando a diferença
entre a tensão de referência e a tensão do capacitor, que está fixada em 3,6V.
Este artifício não influenciará o reconhecimento do nível lógico alto durante o
ciclo ativo do pulso, pois como o valor de Vcc é de aproximadamente 15V, a
diferença de potencial na saída será a subtração de 3,6V dos 15V, resultando
em um valor ainda suficientemente positivo.
A saída do drive isolador de pulso é conectada em uma das chaves do
inversor. Como o inversor possui quatro chaves, são necessários quatro
32
circuitos idênticos ao apresentado acima, um para acionar cada uma das
chaves do inversor.
3.3.3 Fontes Independentes
Para alimentar o circuito do drive isolador de pulsos se faz necessário o
uso de fontes independentes, pois cada drive deverá ter sua referência de terra
isolada da referência dos outros drives. Como serão utilizados quatro circuitos
de drive, um para cada chave do inversor, serão necessárias quatro fontes
isoladas, uma para cada drive isolador de pulso. A figura 3.7 mostra o
esquemático das quatro fontes.
É possível perceber, na figura 3.7, a presença de dois transformadores
com o primário em paralelo, sendo que cada um deles apresenta um
enrolamento primário e dois enrolamentos de secundário. Considerando uma
das
principais
características
dos
transformadores,
que
tem
seus
enrolamentos isolados eletricamente, obtêm-se as quatro fontes isoladas a
partir dos quatro enrolamentos secundários.
3.3.4 O funcionamento das fontes independentes
O circuito da fonte é alimentado por uma tensão de 12 volts e em
paralelo com a tensão de entrada foi colocado um capacitor para mantê-la
constante, ou seja, para tentar minimizar as variações de tensão no
barramento. Esta tensão de 12 volts alimenta o amplificador operacional e os
transformadores, além de fornecer tensão para o divisor de tensão conectado
à porta três do amplificador operacional.
O amplificador operacional CA3140 gera a forma de onda que será
aplicada à porta do MOSFET IRF540 através da comparação de uma onda
triangular com um nível DC obtido através do divisor de tensão formado pelo
resistor R4 e o trimpot TRIMP1.
O MOSFET IRF540 é o responsável pela transferência de potência do
circuito. Como o nível DC está aplicado na porta não-inversora do amplificador
operacional e a onda triangular na porta inversora, temos que o ciclo ativo do
transistor ocorre quando, na comparação, o nível DC for maior que o nível de
tensão da onda triangular.
33
Figura 3.7 - Esquemático das quatro fontes independentes.
Em cada um dos secundários dos transformadores, é conectado um
capacitor em paralelo para manter o nível de tensão da fonte constante.
Também é conectado um diodo, entre o enrolamento secundário e o capacitor,
para determinar o sentido da transferência de energia, não permitindo, por
qualquer motivo, que a tensão do capacitor seja descarregada de volta no
enrolamento secundário do transformador.
Na situação de ciclo ativo do transistor, onde ele está conduzindo, uma
corrente flui da fonte de alimentação (12 volts) para o terra, passando pelo
enrolamento primário dos transformadores. Este caminho está representado
pela linha vermelha na figura 3.8.
A corrente percorre esse caminho devido ao diodo D1, que está
polarizado reversamente, obrigando a corrente a passar pelo enrolamento
primário dos transformadores. Desta forma, a tensão dos enrolamentos
primários assume o valor dos 12 volts da fonte e a corrente que circula no
primário
provoca
a
indução
de
uma
tensão
nos
secundários
dos
transformadores, que polariza diretamente os diodos D2, D3, D4 e D5, que por
sua vez conduzem e carregam os capacitores C2, C4, C6 e C9. São estes
34
capacitores que suprem a potência da carga, ou neste caso, alimentam o
circuito drive isolador de pulso.
Figura 3.8 - Caminho da corrente durante o ciclo ativo do transistor
No caso de o nível DC ser menor que o nível de tensão da onda
triangular, o amplificador operacional aplica tensão zero em sua saída (porta
seis) e o transistor IRF540 entra em estado de corte, ou seja, ele não conduz.
Mesmo com o transistor cortado, a corrente de magnetização do núcleo ainda
precisa circular, e ela o faz através da roda livre, figura 3.9, formada pelo diodo
D1. Ao continuar circulando, esta corrente polariza reversamente Z1, de forma
que o sentido da tensão nos enrolamentos primários inverta e ela assuma o
valor de tensão dado pela expressão abaixo:
Onde:
Vprim é o valor da tensão nos enrolamentos primários;
VZ é o valor da tensão de polarização reversa do diodo zener Z1;
VD1 é o valor da tensão de polarização direta do diodo D1.
35
Pela equação 3.2, constata-se que o sentido da tensão sobre os
enrolamentos primários é o inverso do sentido da tensão durante o ciclo ativo
e tem valor aproximadamente igual ao do diodo zener Z1. Com esta tensão
com sentido contrário aplicada, a variação da corrente que flui pelos
enrolamentos primários também é negativa, causando assim a diminuição do
valor desta corrente até zero. Durante este período de corte do transistor, os
diodos nos secundários são polarizados reversamente e não conduzem.
É válido lembrar que durante o ciclo ativo do transistor ocorre a
magnetização
do
núcleo
e
durante
o
período
de
corte
ocorre
a
desmagnetização do núcleo. E, para que não ocorra a saturação do núcleo, a
energia de desmagnetização deve ser igual à energia acumulada durante a
magnetização. Assim, tem-se que:
Figura 3.9 - Caminho de roda livre
Sabe-se que a energia é a potência aplicada em um determinado
período de tempo e que a potência é dada pela multiplicação entre tensão e
corrente, tornando a equação 3.3 igual à:
36
Onde:
Vmag é a tensão de magnetização;
Imag é a corrente de magnetização;
tmag é o tempo de magnetização;
Vdmag é a tensão de desmagnetização;
Idmag é a corrente de desmagnetização;
tdmag é o tempo de desmagnetização.
Escrevendo a equação 3.3 em função das correntes e indutâncias de
magnetização e de desmagnetização, tem-se que:
Como as indutâncias para a magnetização e a desmagnetização são
iguais à indutância do primário dos transformadores, para a equação 3.5 ser
verdadeira as correntes de magnetização e desmagnetização também devem
ser iguais. Pode-se afirmar também que a corrente em um indutor não possui
descontinuidade [4]. Assim, considerando que a corrente de magnetização
seja igual à corrente de desmagnetização, a equação 3.4 se resume a:
Outro conceito conhecido, de [4], é que:
Substituindo tmag e tdmag na equação 3.6, obtém-se que:
E, por fim, ao isolar Dmax, percebe-se que o valor do ciclo ativo máximo
(razão cíclica máxima) depende dos valores das tensões de magnetização e
desmagnetização, ou seja, está ligado diretamente ao valor do diodo zener Z1,
37
pois a tensão de magnetização será sempre constante e com valor de 12
volts.
Substituindo os valores utilizados neste projeto, que são de 12 V para
Vmag e 20 V para Vdmag (valor da tensão de polarização reversa do diodo zener
Z1), encontra-se que:
Para esses parâmetros de tensão, conclui-se que para haver a total
desmagnetização do núcleo o tempo do ciclo ativo do transistor deve ser no
máximo 62,5% do período.
3.3.5 Projeto do transformador da fonte de alimentação
O transformador utilizado na fonte possui um enrolamento primário e
dois enrolamentos secundários, como mostra a figura 3.10.
Figura 3.10 - Transformador com dois secundários
Este transformador foi projetado para alimentar o circuito do drive
isolador de pulso, sendo alimentado por uma fonte externa com 12 volts em
seu enrolamento primário. Levando em consideração as perdas existentes, os
enrolamentos secundários foram projetados para uma tensão de 15 volts. Com
essas informações, mais alguns dados sobre as condições de trabalho e os
38
parâmetros físicos
do
núcleo utilizado, é
possível dimensionar este
transformador.
Dados necessários para o projeto:
Adotou-se fs = 20kHz e Dmáx = 0,45
O projeto foi feito baseando-se em um núcleo EE 25/10/5, que era o
disponível no momento. Este núcleo possui as seguintes características
construtivas [22] :
Ap = 0,48 cm4
Le = 4,28 cm ou 43 mm
Ae = 0,312 cm2 ou 31,00mm²
Al = 1300 nH/esp2
Onde:
Al é o fator de indutância do núcleo e geralmente é fornecido
pelos fabricantes;
Ae é a área efetiva do núcleo, ou seja, a área pela qual flui o
campo magnético;
Le é o caminho magnético efetivo do núcleo;
Ap é um fator físico do núcleo que é dado pela multiplicação da
área efetiva (Ae) com a área de janela (Aj), que é á área disponível para
os enrolamentos, ou seja, o espaço onde os fios são enrolados.
O dimensionamento do transformador:
Utilizando a fórmula abaixo, calcula-se a energia armazenada no núcleo,
de [4]:
39
Onde Bmáx deve ser um valor de densidade do campo magnético que
mantenha a permeabilidade constante em condições de variações de
temperatura e com campo magnético Hmáx aplicado.
Analisando a curva de histerese de um núcleo de ferrite, como a da
figura 3.11, e supondo que o núcleo sofrerá uma temperatura máxima de
100ºC, o Bmáx utilizável gira em torno de 250mT. Considerando um núcleo
com entreferro, este valor tende a ser um pouco mais alto devido à inclinação
da curva de magnetização. Conforme a literatura [4], um valor típico de Bmáx
que pode ser utilizado é de 300mT.
Figura 3.11 - Curva de histerese de um núcleo de ferrite
Desta forma, aplicando os valores na equação 3.12, encontra-se o valor
de Em:
40
Sabendo que a freqüência de trabalho é de 20kHz, sabe-se que o
período total de um ciclo é o inverso da frequencia de trabalho, ou seja:
Levando em consideração um Dmáx de 0,45:
O próximo passo é calcular a indutância de um enrolamento do
transformador. Parte-se do pressuposto de que a energia armazenada no
núcleo (Em) seja igual à energia armazenada pelo indutor, de [4]:
Sabe-se que:
Ou também que:
Substituindo a equação 3.15 na equação 3.13 e isolando a variável L,
encontra-se:
Onde:
V é o valor da tensão no enrolamento;
t é o tempo no qual o enrolamento estará submetido à
tensão V, ou seja, é o tempo tON.
Considerando
que
o
enrolamento primário
do
transformador
é
alimentado por uma tensão de 12 volts e que t ON já foi determinado e vale
22,5
, tem-se:
41
Conhecendo o valor da indutância, é possível determinar o número de
espiras necessárias através da seguinte equação:
ou
(3.17)
Substituindo os valores de L e AL, encontra-se que:
Ou, segundo [4], também é possível determinar o valor de espiras do
enrolamento primário do transformador a partir da fórmula abaixo:
Para calcular o número de espiras do secundário, utiliza-se a relação de
tensão entre primário e secundário, já conhecida:
Como os dois secundários são idênticos, ambos possuem 36,25 espiras.
Para determinar o diâmetro do fio de cobre a ser utilizado, buscou-se
conhecer a grandeza do maior valor de corrente que circulará pelos
enrolamentos, e que neste caso será a corrente do primário. Assim, pela
equação 3.15:
Considerando que esta corrente não é elevada e não circulará
constantemente pelos enrolamentos, além do fato do núcleo usado ser
relativamente pequeno para o número de espiras a serem enroladas, adotou-se
um fio de cobre de bitola 23 AWG, que suporta correntes de até 0,73 A.
42
3.4
3ª etapa – Circuito de potência
3.4.1 O inversor
O inversor utilizado neste trabalho foi projetado para fornecer em sua
saída uma tensão CA senoidal de 110 V RMS com freqüência de 60 Hz e para
alimentar uma carga com potência máxima de 500 W. A tipologia utilizada foi a
do inversor em ponte completa, que possui quatro MOSFET’s dispostos em
dois braços, como mostra a figura 3.12. Os MOSFET’s utilizados são do tipo
IRF840, pois cada um suporta uma tensão de até 500 V e uma corrente de até
8 A [23].
Figura 3.12 - Esquemático do inversor
No esquemático apresentado já estão incluídos o filtro de saída e o
snubber,
que
são
circuitos
auxiliares
ao
inversor
e
que
servem,
respectivamente, para filtrar as harmônicas de alta frequência geradas pelo
chaveamento dos MOSFET’s e para proteger os mesmos contra bruscas
variações de tensão e corrente que podem ser geradas pelas oscilações em
alta freqüência e podem levar os componentes à queima [1].
Nos conectores G1, G2, G3 e G4 são aplicados os pulsos PWM
provenientes das saídas do drive isolador de pulsos. Os conectores G2 e G4
recebem os pulsos complementares de G1 e G3.
Para alcançar uma saída alternada com tensão de 110 V RMS é preciso
alimentar o circuito com uma tensão contínua de aproximadamente 200 V. Este
43
valor foi encontrado considerando-se o valor de pico da tensão CA mais 30%
para compensar as perdas.
Onde:
é a tensão de alimentação do inversor;
A carga, que pode ser puramente resistiva ou indutiva, é conectada no
conector de saída. Para melhor demonstrar o comportamento do inversor, foi
feita uma simulação no ORCAD para uma carga RL e, foram encontradas as
formas de onda da corrente e tensão de saída assim como os pulsos PWM
aplicados na porta dos MOSFET’s. O esquemático usado está na figura 3.13.
V1 = 0
V2 = 5
TD = 0
TR = 0.49m
TF = 0.49m
PW = 0.01m
PER = 1m
V3
V1
12
V5
200
M1
U1
M3
R1
2
IRF840
0
IRF840
50
I
L1
50m
LM318
V2
VOFF = 2.5
VAMPL = 1.75
FREQ = 60
M2
1
IRF840
V1 = 0
V2 = 5
TD = 0
TR = 0.49m
TF = 0.49m
PW = 0.01m
PER = 1m
M4
IRF840
V7
V4
12
U2
LM318
V6
VOFF = 2.5
VAMPL = 1.75
FREQ = 60
V1 = 0
V2 = 5
TD = 0
TR = 0.49m
TF = 0.49m
PW = 0.01m
PER = 1m
V10
V8
12
U3
V1 = 0
V2 = 5
TD = 0
TR = 0.49m
TF = 0.49m
PW = 0.01m
PER = 1m
V13
V11
12
U4
LM318
LM318
V9
VOFF = 2.5
VAMPL = 1.75
FREQ = 60
V12
VOFF = 2.5
VAMPL = 1.75
FREQ = 60
Figura 3.13 - Esquemático do inversor para simulação
A seguir estão expostas as formas de onda obtidas nos gates dos
MOSFET’s M1 e M2, a corrente e a tensão de saída.
Destas três figuras (3.14, 3.15 e 3.16) é possível tirar algumas
conclusões. Primeiro, os pulsos em M1 e em M2 estão realmente defasados
44
em 180º, e segundo, que a tensão de saída é a diferença entre as formas de
onda dos pulsos M1 e M2.
12V
8V
4V
0V
0s
V(M3:g,M4:d)
5ms
10ms
15ms
20ms
25ms
30ms
25ms
30ms
Time
Figura 3.14 - Pulso PWM em M2
12V
8V
4V
0V
0s
V(M1:g,V2:-)
5ms
10ms
15ms
20ms
Time
Figura 3.15 - Pulso PWM em M1
Para entender o gráfico da corrente, figura 3.17, primeiro analisa-se o
comportamento de um indutor, já que a carga de saída é predominantemente
indutiva. Da equação da tensão de um indutor, sabe-se que quando uma
tensão positiva é aplicada entre seus terminais, a corrente apresenta uma
45
derivada positiva. O raciocínio é semelhante para uma tensão negativa, onde a
derivada de corrente é negativa. Assim, como os MOSFET’s são chaveados a
100 kHz, as derivadas de corrente mudam de sentido com esta frequência e
formam uma onda senoidal de 60 Hz devido ao sinal modulante ser uma onda
senoidal em 60 Hz.
400V
200V
0V
-200V
-400V
0s
V(R1:1,L1:1)
5ms
10ms
15ms
20ms
25ms
30ms
25ms
30ms
Time
Figura 3.16 - Forma de onda da tensão de saída
4.0A
2.0A
0A
-2.0A
-4.0A
0s
I(R1)
5ms
10ms
15ms
20ms
Time
Figura 3.17 - Forma de onda da corrente na saída do inversor
46
A partir desta simulação é possível, através de uma comparação, saber
o quão próximo do esperado foram os resultados práticos obtidos.
3.4.2 O snubber
O circuito do snubber consiste de um diodo, um capacitor e um resistor
que são inseridos em paralelo com o MOSFET, como apresentado na figura
3.18. Basicamente, o circuito funciona da seguinte maneira, quando o MOSFET
S1 está aberto o capacitor C4 é carregado via diodo DR4 e quando ele está
conduzindo o capacitor descarrega via R12.
Figura 3.18 - O circuito do snubber
O circuito de snubber é o responsável por proteger o inversor de
variações instantâneas de tensão e corrente.
Projeto do circuito de snubber
Seguindo o procedimento visto na revisão bibliográfica, é possível
projetar os componentes do snubber.
1. Verifica-se a tensão máxima de operação do MOSFET
Deseja-se que a saída do inversor tenha amplitude máxima de 110 V
RMS. Assim, para atender este requisito, a tensão de alimentação do circuito
do inversor deve ser pelo menos:
Para garantir a amplitude da saída, coloca-se uma margem de
segurança de 30% devido às perdas no circuito de potência. Assim, a tensão
máxima aplicada sobre o MOSFET é:
47
2. Dimensiona-se o resistor do snubber para dissipar 1W
Encontrado o valor máximo de tensão aplicada sobre o MOSFET e
sabida a potência dissipada pelo resistor, calcula-se o valor da resistência:
Ω
Conforme a disponibilidade dos valores comerciais de resistência
adotou-se um resistor de 47 Ω. Portanto,
Ω
3. Dimensiona-se o capacitor de modo que a tensão caia para 90% do seu
valor máximo
Adotou-se um fator de descarregamento de 90%, que equivale a uma
tensão de 90% de 202,8V aplicada no capacitor.
Sabe-se que a frequência de chaveamento dos MOSFET’s é de 100kHz
e, portanto, que um período vale 10us. Outra condição imposta é que a razão
cíclica (D) vale 0,5. Desta forma, o tempo de descarregamento do capacitor é
igual à 5us.
Aplicando os valores encontrados na fórmula de descarga do capacitor
(equação 2.14), encontra-se a capacitância.
3.4.3 O filtro de saída
A configuração de filtro passa-baixas utilizado apresenta dois indutores
em série com a carga, um capacitor em paralelo com a carga e quatro
capacitores que são vistos em paralelo pela carga. Devido aos valores
comerciais disponíveis, foram usados alguns capacitores em paralelo para
alcançar os valores projetados. A figura 3.19 já mostra o filtro com seus valores
de capacitor e indutor dimensionados conforme o projeto.
48
Figura 3.19 - Configuração do filtro
Projeto do filtro de saída do inversor
A placa de circuito impresso do filtro do inversor destina um espaço
limitado para os indutores. Devido a essas restrições, este projeto será feito
tomando o caminho reverso.
O ponto de partida é o tamanho máximo permitido para o núcleo do
indutor, que deve ser um núcleo do tipo EE 30/15/7. Este núcleo de ferrite
fornece os seguintes parâmetros de fabricação [24]:
Ap = 0,71 cm4;
Ae = 60 mm²;
Le = 67 mm;
Aplicando essas informações na equação 3.18 e isolando a variável
correspondente à energia, é possível encontrar qual é a máxima energia que
pode ser armazenada neste núcleo.
Para encontrar a energia isola-se a variável E:
49
De [4]:
Ku = 0,4;
Kj = 397;
Bmáx = 0,3.
Em posse do valor máximo de energia suportado pelo núcleo e se
utilizando das equações 3.19 e 3.20, determina-se o valor de cada um dos
indutores do filtro, ou seja, a indutância de um núcleo.
Por motivos de segurança, considera-se o valor de Ipico sendo 20% maior
do que o encontrado. Assim, Ipico = 7,71 A.
Isolando L:
Nesta próxima etapa determina-se o valor da capacitância do filtro
através da equação para a frequência de corte:
Na revisão de literatura foi visto que a frequência de corte do filtro deve
ser pelo menos uma década menor do que a frequência de trabalho das
chaves do inversor [5]. Neste trabalho, esta frequência é de 100kHz, e,
portanto, a máxima frequência de corte para o filtro deve ser 10kHz. Porém,
quanto menor a frequência de corte menor são as influências das harmônicas
de baixa freqüência sobre o sinal de saída. Mas, para se construir um filtro com
50
frequências de corte muito baixas necessita-se de componentes muito
robustos. Assim sendo, o meio termo encontrado foi para o uso de uma
frequência de corte de 5 kHz, onde os indutores e capacitores são viáveis.
Para encontrar o valor da capacitância, isola-se C na expressão 3.21:
Nesta equação, o valor de L é a soma das duas indutâncias presentes
no filtro, como demonstrado na revisão bibliográfica. A partir desta informação,
L = 59,12uH + 59,12uH ou L = 2 x 59,12uH.
Substituindo estes valores na equação 3.22:
Ressalta-se que este valor encontrado para C é o equivalente a quatro
capacitores vistos em paralelo pela carga, o que resultaria em quatro
capacitores de 2,1425uF. Para facilitar a implementação do filtro em termos de
valores comerciais, utilizou-se oito capacitores de 1uF, totalizando uma
capacitância equivalente de 8uF.
Projeto do indutor do filtro
O projeto dos indutores parte dos parâmetros do núcleo, já citados
anteriormente. O primeiro cálculo feito foi para encontrar o fator de indutância
(AL), equação 3.23, de [4]:
Conforme catálogo do fabricante [24], para obter este fator de indutância
com o núcleo 30/15/7 se faz necessário o uso de entreferro. Calcula-se, então,
o entreferro usando as equações 3.24 e 3.25:
51
Onde:
μ0 vale 4π10-7;
O valor encontrado para μe é substituído na equação 3.25:
O entreferro total deve ter 0,82mm, podendo ser feito em ambas as
extremidades do núcleo EE com metade deste valor, ou seja, 0,41mm. Para o
entreferro foram utilizadas folhas de papel. Mediu-se com um paquímetro a
espessura de uma folha e assim foi possível encontrar um número estimado de
folhas necessárias para completar a espessura do entreferro.
Seguindo com o projeto do indutor, calculou-se o número de espiras
para uma indutância de aproximadamente 59μH:
Para dimensionar o fio de cobre que será usado, primeiro calculou-se a
densidade de corrente (J) à qual o indutor é submetido:
Onde:
x
é
um
parâmetro
relacionado
ao
acréscimo
de
temperatura, que foi considerado de 30ºC e fornece x=0,12.
52
A partir da densidade de corrente obtém-se qual a área de cobre (ACu)
necessária:
Onde:
Ief é obtido dividindo a potência na saída do inversor pelo
valor da tensão quadrática média aplicada (500W/110V = 4,54A).
O fio de cobre disponível para enrolar o indutor é o #23 AWG, que possui
uma área de cobre de 0,002582 cm² [4]. Para obter a área de cobre calculada
foram necessários aproximadamente 5 fios #23 AWG em paralelo, com mostra
a equação a seguir:
3.4.4 Dissipadores
Neste trabalho, o inversor está protegido de agitação térmica por
dissipadores de calor. Em circuitos que envolvem alta potência, normalmente
os dissipadores são cuidadosamente projetados. Porém, em circuitos com
potência mais baixa, como o deste trabalho, não se faz necessário fazer o
dimensionamento dos dissipadores. Assim, o dissipador usado para este
inversor foi escolhido entre os disponíveis em laboratório.
3.5
A montagem
Para realizar os testes e obter os resultados, todo o sistema foi montado
em bancada assim como mostra o diagrama da figura 3.20.
Figura 3.20 - Esquema da montagem em bancada
53
Com exceção do circuito de potência, todos os demais foram
alimentados por uma fonte regulada de tensão de 12 V. Em algumas etapas foi
preciso de uma fonte de 6 V, que foi obtida utilizando-se a própria alimentação
de 12 V e um circuito com o regulador de tensão TL431 [25].
Para a alimentação do inversor, utilizou-se de até três fontes simétricas
de 30 V em série, alcançando uma tensão máxima de 180 V. Uma alternativa
para atingir tensões altas sem a necessidade de se utilizar várias fontes em
série, seria o uso de um variac e de uma ponte de diodos retificadora. Porém, a
primeira opção foi escolhida, pelo menos na fase de testes, porque as fontes
simétricas possuem limitação de corrente.
No diagrama de blocos desenhado para representar a montagem em
bancada, os blocos retangulares representam circuitos ou funções que foram
implementadas, sendo que destas, apenas a parte de controle, que inclui a
geração das ondas triangulares e o comparador PWM, não foi desenvolvida em
protótipo. Ao contrário, os circuitos do drive isolador de pulso e do inversor
foram implementados em placas de circuito impresso.
Os blocos circulares representam tensões externas com função de
alimentação dos circuitos implementados e o bloco hexagonal significa que não
foi desenvolvido um circuito para desempenhar aquela função, sendo utilizado
um equipamento externo, como neste caso, um gerador de funções.
54
4 Resultados e análise
4.1
Protótipos
Nesta seção são apresentados os protótipos desenvolvidos para este
trabalho.
4.1.1 Drive isolador de pulsos
A figura 4.1 mostra o protótipo do drive isolador de pulsos, cujo projeto já
foi exposto neste trabalho.
Figura 4.1 - Protótipo do drive isolador de pulso
4.1.2 Inversor e filtro
O protótipo do inversor e do filtro, figura 4.2, utilizado neste trabalho é
proveniente de um modelo genérico de inversores de ponte completa projetado
pelo professor orientador. O que se fez foi dimensionar os componentes, tanto
do inversor quanto do filtro, conforme os parâmetros desta aplicação.
55
Figura 4.2 - Protótipo do inversor
4.2
Circuito de controle e drive isolador de pulso
4.2.1 Circuito de controle
Nesta seção são mostradas as formas de onda em pontos importantes
do circuito de controle.
A figura 4.3 mostra a onda triangular na saída do CI LM566, que foi
usado no circuito gerador da onda portadora. É possível observar que a
freqüência da triangular é de aproximadamente 100 kHz, frequência desejada
para a portadora.
Figura 4.3 - Triangular gerada pelo circuito utilizando o CI LM566
56
A onda triangular sofre algumas modificações antes de ser aplicada no
comparador PWM. Devido ao uso de um comparador com terra virtual, ela é
deslocada de aproximadamente 6 V, além de ser amplificada para um valor de
pico a pico de aproximadamente 5 V, como mostra a figura 4.4. Esta triangular
é comparada com uma onda senoidal de 60 Hz proveniente de um gerador de
funções, figura 4.5. Pode-se observar que a senoidal também foi deslocada em
aproximadamente 6 V para ficar no mesmo nível de tensão.
Os sinais PWM deslocados de 180º gerados pela comparação estão
expostos na figura 4.6. Ao diminuir a escala do tempo por divisão no
osciloscópio, percebe-se que ambos os pulsos, por um pequeno período, estão
em nível lógico alto simultaneamente, figura 4.7. Este fenômeno não é
desejado e para isso esses pulsos foram condicionados ao serem aplicados em
um circuito lógico que atrasa um pulso em relação ao outro, evitando que
ambos coincidam em valor lógico alto, o que causaria a condução de dois
MOSFET’s do mesmo braço do inversor. A figura 4.8 mostra os pulsos PWM
complementares com seus respectivos atrasos.
Figura 4.4 - Triangular na entrada do comparador PWM
57
Figura 4.5 - Onda senoidal utilizada na comparação PWM
Figura 4.6 - Pulsos complementares gerados pela comparação PWM
58
Figura 4.7 - Cruzamento dos pulsos PWM complementares
Figura 4.8 - Pulsos PWM complementares com atraso
4.2.2 Drive isolador de pulso
Os resultados aqui apresentados mostram algumas ondas referentes ao
funcionamento do circuito do drive isolador de pulso, como a razão cíclica do
pulso PWM aplicado à porta do MOSFET da fonte independente, figura 4.9, e a
forma de onda entre os terminais do transformador, figura 4.10.
59
Figura 4.9 - PWM aplicado à porta do MOSFET da fonte independente
Observa-se que a razão cíclica deste pulso é menor que 0,625, condição
necessária para o transformador não saturar e que foi demonstrada na seção
3.3.4. Na imagem seguinte, figura 4.10, percebe-se que durante o período ativo
do MOSFET o transformador tem os 12V da alimentação em seus terminais, e,
quando o MOSFET não está conduzindo, o núcleo é desmagnetizado sob a
tensão igual à do diodo zener, que é aproximadamente 20 V. Para esta
medição a ponteira do osciloscópio estava multiplicada por 10.
Figura 4.10 - Tensão entre os terminais do transformador da fonte
independente
Os pulsos apresentados na figura 4.8 são os pulsos de saída do circuito
de controle, que são os mesmos aplicados na entrada do drive isolador de
60
pulso. Na saída do drive são obtidos os pulsos que são aplicados no inversor,
figura 4.11.
Figura 4.11 - Pulsos PWM obtidos na saída do drive isolador de pulso
4.3
Circuito do inversor
Para iniciar os testes com o inversor, foram fixados os valores da
frequência modulante em 60 Hz, da frequência da portadora em 100 kHz, da
carga em 1 kΩ e da amplitude da portadora em 5 V.
Alimentou-se o inversor com 30 V e variou-se a amplitude da modulante
de modo que a forma de onda da tensão de saída estivesse no limiar de
saturação, obtendo a maior amplitude possível sem distorção.
61
Figura 4.12 - Forma da tensão de saída saturada
A figura 4.12 mostra um exemplo onde a tensão de saída está saturada
devido à amplitude da onda senoidal ter ultrapassado os limites de amplitude
da onda triangular, prejudicando a comparação e consequentemente a
modulação por largura de pulso, o que interfere na forma do sinal de saída. A
fim de evitar este problema, ajustou-se a amplitude da onda senoidal para que
a saída não apresentasse distorção, como o exemplo visualizado na figura
4.13.
Figura 4.13 - Saída do inversor sem distorção para Vin = 30 V
62
Com a amplitude da modulante ajustada, variou-se o valor da tensão de
alimentação do inversor (Vin) e monitorou-se as correntes de entrada e de
saída assim como a tensão de saída. Os valores anotados estão na tabela 4.1.
Tabela 4.1 - Variação de Vin (R=1k, fm=60Hz, fp=100kHz)
Vin [V]
Vout [VRMS]
Iin [mA]
Iout [mA]
30
15,4
20
19
60
30,3
30
34
90
50,8
60
51
120
69,7
80
65
180
97,0
130
104
204
110,0
160
118
A seguir são apresentados os gráficos da tensão de saída capturadas do
osciloscópio via comunicação serial e por meio de um software de captura de
tela.
Figura 4.14 - Tensão de saída para Vin = 60 V
63
Figura 4.15 - Tensão de saída para Vin = 90 V
Figura 4.16 - Tensão de saída para Vin = 120 V
64
Figura 4.17 - Tensão de saída para Vin = 180 V
Figura 4.18 - Tensão de saída com Vin = 204 V
Na sequência, buscou-se avaliar o comportamento do inversor para uma
variação de carga resistiva. Para isso ajustou-se o inversor com uma tensão de
saída em 110 V eficaz, sinal da portadora como sendo sinal triangular de 5 V
de pico a pico e freqüência de 100kHz. Ajustou-se a modulante a fim de se
obter o maior valor de amplitude sem distorção para a tensão de saída. A carga
utilizada foi um reostato de 1kΩ com máxima potencia de 1kW. Alimentou-se o
reostato com o inversor e monitorou-se as correntes de entrada e saída
65
conforme a carga era variada. Os resultados podem ser verificados na tabela
4.2.
Tabela 4.2 - Variação da carga resistiva (Vout-rms=110V, fm=60Hz,
fp=100kHz)
R [Ω]
Iin [mA]
Iout [mA]
1000
190
117
800
210
145
600
230
191
400
280
279
200
400
504
100
600
872
Para analisar o comportamento do inversor com uma carga indutiva,
aplicou-se em sua saída um motor de indução monofásico com as seguintes
características:
Fabricante: Promeco;
Rotação: 15000 RPM;
Tensão de alimentação: 110 V;
Potência: 150 W;
Corrente: 1,4 A;
Para este teste com carga indutiva, a freqüência da modulante foi
mantida em 60 Hz, a freqüência da portadora em 100 kHz e a tensão de
alimentação do inversor foi variada até a saída alcançar o valor da tensão
nominal do motor. Monitorou-se as correntes de entrada e de saída e os
resultados obtidos se encontram na tabela 4.3.
Tabela 4.3 - Carga indutiva (fm=60Hz, fp=100kHz)
Vin [V]
Vout-rms[V]
Iin [mA]
Iout [mA]
60
34,5
150
436
90
50,0
240
469
120
66,0
330
490
180
100
400
555
195
110
440
590
66
Testado o comportamento do inversor com cargas de comportamento
resistivo e indutivo e trabalhando em diferentes valores de tensão e corrente,
foram realizados testes para avaliar a influência da modulação na resposta do
inversor.
Primeiro, manteve-se a frequência da onda senoidal, a modulante, em
60 Hz e diminui-se a frequência da onda portadora, a triangular, visando
verificar o comportamento da saída para diferentes índices de modulação.
Como o objetivo deste teste é compreender o efeito da modulação sobre o
inversor, manteve-se a tensão de alimentação em um valor intermediário, neste
caso, 60 V. A tabela 4.4 apresenta os resultados encontrados.
Tabela 4.4 - Variação de fp (Vin=60V, fm=60Hz, R=1kΩ)
fp [Hz]
Iin [mA]
Iout [mA]
100k
30
34
50k
70
43
30k
160
60
As imagens a seguir, capturadas do osciloscópio, mostram a resposta do
inversor para cada uma das condições da tabela 4.4, possibilitando uma melhor
visualização dos efeitos causados pela variação da freqüência da portadora.
Figura 4.19 - Tensão de saída para fp = 100 kHz
67
Figura 4.20 - Tensão de saída para fp = 50 kHz
Figura 4.21 - Tensão de saída para fp = 30 kHz
Entende-se que ao diminuir a frequência da portadora, a forma de onda
da tensão de saída do inversor sofre uma distorção, que aumenta conforme a
diminuição da frequência da portadora. Porém, devido à baixa frequência da
modulante não foi possível observar, com o osciloscópio, o comportamento da
distorção, que está em uma freqüência muito superior. Para facilitar a
68
visualização, estes testes foram repetidos para uma modulante com frequência
de 1 kHz.
Tabela 4.5 - Variação de fp (Vin=60V, fm=1kHz, R=1kΩ)
fp [Hz]
Iin [mA]
Iout [mA]
100k
90
40
50k
100
48
30k
200
70
25k
250
70
20k
370
88
15k
850
124
Os dados obtidos neste novo teste são exibidos na tabela 4.5, enquanto
que as figuras correspondentes a cada uma das condições impostas estão logo
abaixo.
Figura 4.22 - Tensão de saída com fm = 1 kHz e fp = 100 kHz
69
Figura 4.23 - Tensão de saída com fm = 1 kHz e fp = 50 kHz
Figura 4.24 - Tensão de saída com fm = 1 kHz e fp = 30 kHz
70
Figura 4.25 - Tensão de saída com fm = 1 kHz e fp = 25 kHz
Figura 4.26 - Tensão de saída com fm = 1 kHz e fp = 20 kHz
71
Figura 4.27 - Tensão de saída com fm = 1 kHz e fp = 15 kHz
Observando as imagens anteriores é possível perceber que para uma
portadora com freqüência menor que 50 kHz começam a surgir algumas
distorções na forma de onda da tensão de saída. Na freqüência de 50 kHz essa
distorção ainda é muito pequena e quase imperceptível, mas conforme esses
valores são diminuídos a distorção aumenta.
Uma análise quantitativa foi feita analisando-se a relação entre o índice
de modulação e a distorção observada nas figuras.
Para fm = 1 kHz e fp = 100 kHz:
Para fm = 1 kHz e fp = 50 kHz:
Para fm = 1 kHz e fp = 30 kHz:
Para fm = 1 kHz e fp = 25 kHz:
Para fm = 1 kHz e fp = 20 kHz:
72
Para fm = 1 kHz e fp = 15 kHz:
Através da análise dos cálculos apresentados, confirma-se que quanto
menor o índice de modulação maior é a distorção sofrida pela tensão de saída.
Isto ocorre porque um índice de modulação baixo significa uma pequena
quantidade de amostras dentro de um período do sinal modulante e, quanto
menor a quantidade de amostras, menor é a precisão da modulação do sinal
de entrada. Outro efeito observado, desta vez pelos dados da tabela 4.5, é que
há um aumento significativo da corrente de entrada quando ocorrem
diminuições do índice de modulação, o que causa maiores perdas de energia
no inversor.
Para concluir sobre a importância da escolha de uma técnica de
modulação senoidal PWM adequada para as aplicações em inversores, foi feita
uma análise comparativa da técnica de modulação senoidal bipolar PWM
desenvolvida neste trabalho com a técnica de modulação senoidal unipolar
PWM, desenvolvida em [26].
A principal vantagem apresentada pela técnica bipolar é que seu circuito
possui um pequeno número de componentes, tornando sua implementação e
manutenção menos complexas e, consequentemente, seu custo mais baixo.
A desvantagem mais evidente, da modulação senoidal bipolar PWM em
relação à modulação senoidal unipolar PWM, é a maior quantidade de
distorção presente no sinal de saída. Esta distorção é mais discrepante para
valores menores do índice de modulação, não sendo muito perceptível uma
diferença entre as duas técnicas para índices de modulação elevados.
Esta desvantagem se justifica pelo fato de que na modulação bipolar a
carga está sujeita a uma tensão diferencial que varia de –Vcc a +Vcc, o que
acarreta em um alto valor de conteúdo harmônico.
73
Como visto na revisão bibliográfica, para a técnica bipolar a frequência
de chaveamento dos MOSFET’s do inversor é a mesma frequência da onda
portadora usada na modulação, enquanto que na técnica unipolar a frequência
de chaveamento é duas vezes maior que a frequência da portadora [26]. Então,
para se ter um bom grau de comparação do comportamento dessas técnicas
conforme a variação da frequência de portadora, foram comparados os sinais
de saída do inversor com a frequência de portadora utilizada para a técnica
unipolar sendo metade da utilizada na técnica bipolar. As figuras 4.28 e 4.29
mostram as tensões obtidas em cada um dos braços do inversor com a técnica
bipolar e unipolar, respectivamente.
Percebe-se das figuras 4.28 e 4.29 que os pulsos obtidos com a técnica
bipolar são complementares e com mesma frequência, resultando em um pulso
na saída diferencial do inversor com frequência igual à das obtidas em cada um
dos braços. Já ao utilizar a modulação unipolar os pulsos obtidos em cada um
dos braços além de serem complementares estão defasados de 180 graus
entre si, fazendo com que a frequência do pulso da saída diferencial seja
dobrada.
Figura 4.28 - Tensão em cada um dos braços do inversor para usando
modulação bipolar
74
Figura 4.29 - Tensão em cada um dos braços do inversor para usando
modulação unipolar
Para exemplificar a diferença de susceptibilidade à distorção entre essas
duas técnicas, são expostas algumas figuras da tensão de saída do inversor,
uma de cada técnica alternadamente, onde o inversor está sujeito às mesmas
condições de alimentação e frequência de chaveamento.
Figura 4.30 - Saída do inversor para modulação unipolar (fm=1kHz e
fp=50kHz)
75
Figura 4.31 - Saída do inversor para modulação bipolar (fm=1kHz e
fp=100kHz)
Figura 4.32 - Saída do inversor para modulação unipolar (fm=1kHz e
fp=25kHz)
76
Figura 4.33 - Saída do inversor para modulação bipolar (fm=1kHz e
fp=50kHz)
Figura 4.34 - Saída do inversor para modulação unipolar (fm=1kHz e
fp=15kHz)
77
Figura 4.35 - Saída do inversor para modulação bipolar (fm=1kHz e
fp=30kHz)
Mesmo trabalhando com um índice de modulação maior que o
compatível da modulação senoidal unipolar PWM, porém com mesma
frequência de chaveamento, é evidente a maior presença de distorção nas
formas de onda da tensão de saída do inversor quando se aplica a modulação
senoidal bipolar PWM.
78
5 Conclusões
Com base nos resultados obtidos neste trabalho concluiu-se que é
possível diminuir as perdas por distorção em inversores apenas ajustando a
técnica de modulação senoidal PWM. No caso da técnica de modulação
senoidal bipolar PWM, constatou-se que a eficiência do inversor cai
bruscamente conforme se diminui o índice de modulação. Portanto, esta
técnica apresenta um melhor desempenho quando a onda portadora tem uma
frequência muito superior à frequência da modulante, o que restringe sua
aplicação eficiente a circuitos que suportem trabalhar com altas frequências.
Comparando esses resultados com os obtidos em [26], percebe-se que
a modulação senoidal bipolar PWM causa mais distorções que a modulação
senoidal unipolar PWM, considerando parâmetros de trabalho idênticos nos
dois casos. Assim, apesar das desvantagens de implementação, é possível
afirmar que é mais vantajoso utilizar a técnica unipolar em aplicações que não
exigem um alto índice de modulação do pulso PWM.
O trabalho foi concluído satisfatoriamente porque o sistema proposto
inicialmente foi implementado com sucesso e através dele os conceitos da
teoria de modulação por largura de pulso em estudo foram validados. Além
disso, o desenvolvimento deste projeto proporcionou o aprendizado em
algumas áreas técnicas, como em projetos de layout de placa e na montagem
de protótipos.
Como sugestão para trabalhos posteriores que venham a
trabalhar com modulação PWM, deixa-se a experiência da dificuldade
encontrada na implementação do circuito de controle em protoboard devido às
altas frequências envolvidas. Seria melhor desenvolver um protótipo para este
circuito depois de ajustado o controle, o que facilitaria na sua manutenção e na
realização de testes aplicados, como por exemplo, em inversores.
79
6 Referências bibliográficas
[1] RASHID, Muhammad H.. Eletrônica de Potência : Circuitos, dispositivos e
aplicações. 2. Ed. São Paulo: MAKRON Books, 1999.
[2] SEDRA, A; SMITH, K. C.. Microeletronics Circuits. 4. Ed. Nova Iorque:
Oxford University Press, 2004.
[3] FITZGERALD, A. E.; KINGSLEY, Charles; UMANS, Stephen D.. Electric
Machinery. 6. Ed. Nova Iorque: McGraw-Hill, 2003.
[4] TREVISO, Carlos H. G.. Apostila de eletrônica de potência. 2006.
[5] CANÔNICO, Rodolfo Barreto. Amplificador de áudio tipo classe D,
reposta em frequência 20 Hz a 20 kHz, alta fidelidade e modulação
multiplexada. 2011. 118 f. Dissertação (Mestrado em Engenharia Elétrica) –
Universidade Estadual de Londrina, Londrina.
[6] OPPENHEIM, Alan V.; WILLSKY, Alan S.; NAWAB, S. Hamid. Signals and
Systems. 2. Ed. Nova Jersey: Prentice-Hall, 1997.
[7] MALVINO, Albert Paul. Eletrônica. 4. Ed. São Paulo: MAKRON Books,
1997. V. 2.
[8] EDMINISTER, Joseph A.; NAHVI, Mahmood. Circuitos elétricos. 4. Ed.
São Paulo: BOOKMAN, 2003.
[9] National Semiconductor. LM566C Datasheet. 1995.
http://www.datasheetcatalog.org/datasheets/166/53609_DS.pdf (acessado em
23/10/11)
[10] Texas Instruments. TL074 Datasheet. 1996.
http://www.datasheetcatalog.org/datasheet/texasinstruments/tl074.pdf
(acessado em 23/10/11)
[11] National Semiconductor. LM318 Datasheet. 1994.
http://www.datasheetcatalog.org/datasheet/nationalsemiconductor/DS007766.P
DF (acessado em 23/10/11)
80
[12] Philips Semiconductors. HEF4081B Datasheet. 1995.
http://pdf1.alldatasheet.com/datasheetpdf/view/17734/PHILIPS/HEF4081B.html (acessado em 23/10/11)
[13] Philips Semiconductors. HEF4049B Datasheet. 1995.
http://www.datasheetcatalog.org/datasheet/philips/HEF4049BF.pdf (acessado
em 23/10/11)
[14] Fairchild Semiconductor. 6N137 Datasheet. 2001.
http://www.datasheetcatalog.org/datasheet/fairchild/6N137.pdf (acessado em
23/10/11)
[15] BORSATO, Luiz Fernando Furlan. Controle do circuito de potência do
módulo de posicionamento de painel solar de baixo custo para uso
residencial. 2009. 50 f. Trabalho de conclusão de curso (Graduação em
Engenharia Elétrica) – Universidade Estadual de Londrina, Londrina.
[16] GUTANSKIS, José Augusto Machado. Estrutura mecânica e circuito de
potência do módulo de posicionamento de painel solar de baixo custo
para uso residencial. 2010. 52 f. Trabalho de conclusão de curso (Graduação
em Engenharia Elétrica) – Universidade Estadual de Londrina, Londrina.
[17] National Semiconductor. CD4049A Datasheet. 1988.
http://pdf1.alldatasheet.com/datasheet-pdf/view/8178/NSC/CD4049.html
(acessado em 23/10/11)
[18] Fairchild Semiconductor. BC327 Datasheet. 2002.
http://www.datasheetcatalog.org/datasheet/fairchild/BC327.pdf (acessado em
23/10/11)
[19] Fairchild Semiconductor. BC337 Datasheet. 2002.
http://www.datasheetcatalog.org/datasheet/fairchild/BC337.pdf (acessado em
23/10/11)
[20] Intersil Americas. CA3140 Datasheet. 2002.
http://www.datasheetcatalog.org/datasheet/intersil/fn957.pdf (acessado em
23/10/11)
81
[21] Fairchild Semiconductor. IRF540N Datasheet. 2002.
http://www.datasheetcatalog.org/datasheet/fairchild/IRF540N.pdf (acessado em
23/10/11)
[22] Thornton Eletrônica. NEE 25/10/5 Datasheet.
http://www.thornton.com.br/produtos/nee.htm (acessado em 23/10/11)
[23] Fairchild Semiconductor. IRF840 Datasheet. 2002.
http://www.datasheetcatalog.org/datasheet/fairchild/IRF840.pdf (acessado em
23/10/11)
[24] Thornton Eletrônica. NEE 35/15/7 Data sheet.
http://www.thornton.com.br/produtos/nee.htm (acessado em 23/10/11)
[25] Fairchild Semiconductor. TL431 Datasheet. 2003.
http://www.datasheetcatalog.org/datasheets/90/321931_DS.pdf (acessado em
23/10/11)
[26] ROSSI, Cristiano. Inversor de freqüência Modulação senoidal PWM
unipolar. 2011. 69 f. Trabalho de conclusão de curso (Graduação em
Engenharia Elétrica) – Universidade Estadual de Londrina, Londrina.
82
7 Apêndice
7.1
Projeto da placa de circuito impresso do drive isolador de pulso
Como o circuito da fonte é responsável somente pela alimentação do
drive isolador de pulso, os dois circuitos foram projetados para ficarem no
mesmo protótipo. O apêndice 7.2 mostra o esquemático equivalente utilizado
no desenvolvimento do layout da placa de circuito impresso.
Para efeitos de projeto, buscou-se reduzir ao máximo o tamanho da
placa. Considerando essas restrições físicas, de início já era sabido que esta
seria uma placa dupla face, ou seja, com trilhas em ambas as faces da placa.
O primeiro passo realizado, visando economizar espaço, foi o de
distribuir os componentes em uma prancha de isopor, estudando as
alternativas de layout mais adequadas. Esta distribuição foi feita levando em
consideração as conexões do esquemático, de modo que os componentes
que estão conectados entre si ficassem o mais próximo possível. Esse
planejamento é importante porque facilita a etapa de route das trilhas.
Esta etapa de montagem do circuito na prancha de isopor foi uma das
mais trabalhosas, pois vários fatores precisam ser considerados, como, em
qual lado será a entrada e em qual será a saída dos sinais, qual a melhor
posição para os transformadores de forma que não ocupem tanto espaço,
como distribuir componentes DIP e SMD de maneira que a placa tenha uma
configuração simétrica.
Depois de algumas tentativas, chegou-se a uma configuração aceitável
para a placa. A etapa seguinte foi digitalizar esta configuração, obtida pela
distribuição dos componentes na prancha de isopor, através de um software
do tipo CAD elétrico. Neste projeto foi utilizado o P-CAD 2006.
Devido à baixa variedade de bibliotecas que o P-CAD proporciona, foi
necessário desenvolver o modelo de alguns componentes que não estavam
disponíveis pelo programa. Em posse de todos os modelos que faltavam, foi
possível transferir a configuração de placa para o computador.
83
Apesar de já ter a distribuição dos componentes digitalizada, antes de
routear a placa foi necessário verificar se a resolução visualizada em tela era
compatível com a dimensão real dos componentes. Portanto, imprimiu-se o
arquivo PCB, ainda sem as trilhas, para realizar outro teste na prancha de
isopor. Percebeu-se, em vários momentos, que na prática, os componentes
não se encaixavam com facilidade. Assim, foi necessário ajustar a distribuição
dos componentes no P-CAD e testá-la novamente no isopor por várias vezes,
até que não houvesse mais problemas.
Depois de finalizada esta parte de ajustes do layout da placa, iniciou-se
o routeamento da placa. Routear a placa significa conectar os componentes,
assim como estão conectados no esquemático, através de trilhas de
cobre/estanho sobre as faces da placa. Esta etapa também foi feita com o PCAD 2006. Como o circuito foi projetado para ser o mais compacto possível, o
trabalho de routear se tornou ainda mais complexo.
Como esta foi a primeira experiência em um projeto do layout de uma
placa, foram necessárias várias tentativas de ligação das trilhas até ser
atingido um bom nível. Na primeira tentativa de placa, o circuito funcionou
perfeitamente, mas antes disso, ocorreram muitos erros devido às dificuldades
encontradas com soldas mal feitas e trilhas rompidas. Para resolver estes
problemas, analisaram-se cada uma das dificuldades encontradas no
processo de montagem da placa e refez-se o projeto buscando saná-las.
As
dificuldades
encontradas
nesta
primeira
tentativa
foram
principalmente com relação às soldas, pois alguns componentes que ocupam
uma grande área na parte de cima da placa, como capacitores,
transformadores e circuitos integrados tipo DIP, tinham trilhas chegando aos
seus terminais tanto por cima (top layer) quanto por baixo (bottom layer). Para
evitar esse problema, o novo projeto foi feito com o objetivo de que os
componentes com essas características recebessem as trilhas somente por
um lado da placa, de preferência pelo de baixo (bottom layer), o que facilitaria
muito na hora da montagem prática.
84
Com o novo projeto pronto, percebeu-se que sua montagem ficou mais
fácil e que os problemas encontrados anteriormente não voltaram a aparecer,
deixando todo o processo mais prático e eficiente.
Antes de a placa ser confeccionada, foi feita uma padronização visando
facilitar a identificação dos componentes tanto no momento de soldar como no
de fazer testes. Para isso, todos os componentes com posicionamento
horizontal ou vertical foram nomeados de modo que a escrita de suas
referências ficasse no mesmo sentido de leitura. Outro ponto importante de ser
ressaltado, é que os componentes possuem o mesmo nome tanto no
esquemático como no arquivo PCB, facilitando também o trabalho de
soldagem.
As figuras abaixo mostram alguns pontos do processo do projeto desta
placa. A figura 7.1 é o arquivo PCB final, já as figuras 7.2 e 7.3 mostram
separadamente os layers TOP e BOTTOM. Essas mesmas imagens foram as
usadas para impressão em fotolito, que depois foi utilizado para confecção da
placa de circuito impresso.
Figura 7.1 - Arquivo PCB do circuito de drive
85
Figura 7.2 - Top layer
Figura 7.3 - Bottom layer
86
7.2
Esquemático do circuito do drive isolador de pulso
87
7.3
Esquemático do circuito completo
V
1
12Vd
c
R1
22k
SET =
0.5
0
R37
47
2
0
6
V
OPTO1
6N137
8
5
6
7
R2
10k
SET = 0.5
R3
100
k
C1
47
p
U1
3
MOD
SQWOU 4
TRWOUT
TRE
T
TCA
S
P
LM566C
C2
2.2n
C4
0
U2A
TL074
A
1
4
3 +
47
u
5
2
5
4
INPAD
V
1
Z
1N4729
4
OUTPAD
11
2
J2
JUMPER
7
2
1
C1
470
4
u
Z
1N473
2
6
9
R6
1
0
K
10
11
0
R4
10K
0
T
BC327
2
GND_
1
C1
47
6
u
G
1 1
2
6
1
Z
1N4747
1
D1
UF4007
2
TRIMP
20K
1
75
0
10K
R38
TRIANG
2
1
10K
15
GND_
1
481
0
U2
TL074A
B
7
4
5 +
R2
3
3.3
k
INPAD
V2
6 -
V
4
C5
47
u
R6
1k
0
R7
1k
12V
R9
100
k
0
0
12V
0
3
R26
10k
2
R27
10k
47
p
U4
LM31
8
6
404
U6A
9
OPTO2
6N137
2
8
7
6
3
1
0
47
p
C7
75
R8
1k
1
4 81
4
404
U6B
4 9
INV2
CD4049
A
3
A
2
CA314
0
R4
1k
1
R4
2
10
0
5
4
7
6
0
10
D3
UF400
7
C19
470
u
GND_
2
MOS
IRF540
TRAFO
22
6
7
9
4
INPAD
V2
5
Z5
1N4733
R4
47
5
0
R4
1
4
K
D4
UF400
7
10
D5
C2
470
0
u
GND_
3
Z
1N472
7
9
Z6
1N4736
9
6
R46
1
K
10
GND_
2
11
12
14
15
1
2
G3
V
1
OUTPAD
V
2
OUTPAD
V
3
OUTPAD
V
4
OUTPAD
GND_
4
T
BC327
4
GND_
2
C1
47
5
u
C2
470
1
u
T
BC337
R4
3
7 15
3
U7B
408
1
5
4
C17
470
u
GND_
1
UF4007
R4
47
3
0
2
C6
3 +
2
-
U5A
4
3 +
2 -
U3
LM31
8
6
7 5
3 +
2
-
0
6V
VOFF =
VAMPL =
FREQ =
60Hz
R5
1k
R4
10K
11
R2
10k
4
1
U7A
408
1
6
0
12V
12V
A
O
3 +
2 -
0
R25
10k
D2
UF4007
TRAFO
21
6
7
9
R39
GND_
1
12
14
1
0
12V
T
BC337
R61
1
15
R4
1
9
K
Z
1N4733
3
3
TRIANG
2 -
0
R5
47
2
0
7
6
3
C3
5.6
n
INV1
CD4049
A
A
INPAD
V
1
GND_
2
481
TL074A
11
0
0
0
INV3
CD4049
A
A
INPAD
V
3
R48
47
2
0
OPTO3
6N13
7
8
R51
47
0
R50
1K
7
6
3
2
5
4
7
6
INPAD
V
3
T
BC337
5
R5
15
4
3
0
5
Z1
1N4729
0
Z8
1N473
3
Z
1N473
9
6
C18
47
u
9
R5
1
3
K
10
GND_
3
11
G
1 2
2
T
BC327
6
G1
2
1
R6
2
10
R
GND_
3
12
1
J1
JUMPE
R
14
GND_
3
202.8Vdc
INPAD
V
4
R55
47
2
0
OPTO4
6N13
7
8
7
6
3
0
5
Z1
1N472
3
9
GND_
4
15
Z11
1N473
3
C2
47
2
u
R5
47
7
0
R5
1
6
K
Z1
1N473
2
6
2
5
4
INPAD
V
4
T
BC337
R59
7
15
7
6
9
10
11
12
14
15
R5
1
8
K
GND_
4
G
1 4
2
R
s
1k
C27
C2
1u
9
1u
R7
47k
1
C23
22n
1
L2
R63
10R
G
2
2 1
R64
10R
DR3
UF400
7
S
2
IRF840
R67
SAÍD
A1 2
2
1
59
u
2
1
C36
1u
C31
1u
V
7
G4
INV4
CD4049
A
3
A
C3
5
1u
IRF840
R6
8
1k
2
DR4
UF400
7
S
1
C32
C26
22n
C24
22
n
R7
47k
2
2
G
3 2
1
1u
IRF840
R6
9
1k
1k
59
u
DR1
UF400
7
D7
L1
R7
47k
0
C34 C28
1u
1u
C3
1u
0
C3
1u
3
R65
10R
DR2
UF400
7
D8
IRF840
R66
1k
C25
22
n
R7
47k
3
T
BC327
8
GND_
4
88

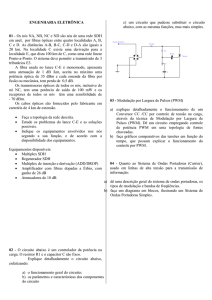



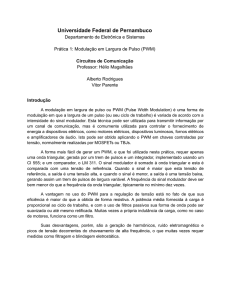
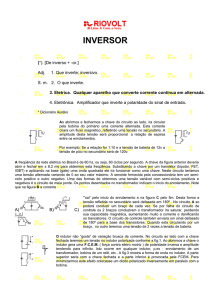



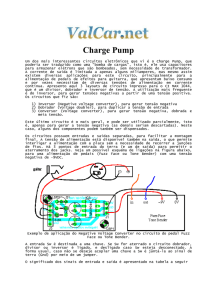
![1. [5] Um circuito integrado precisa de uma tensão de alimentação](http://s1.studylibpt.com/store/data/000892095_1-927da8bea174b016f37ec8deb83e76f0-300x300.png)
