UFLA – Universidade Federal de Lavras
DEX – Departamento de Ciências Exatas
Bacharelado em Ciência da Computação
CVMDDC CONTROLE DE VELOCIDADE DO
MOTOR DC
Autor:
Edna Mie Kanazawa
Orientador:
Wilian Soares Lacerda
Lavras, novembro de 1998
UFLA - Universidade Federal de Lavras
DEX - Departamento de Ciências Exatas
Ciência da Computação
2
UFLA - Universidade Federal de Lavras
DEX - Departamento de Ciências Exatas
Ciência da Computação
1. Introdução
Hoje em dia muitos projetos utilizando motores necessitam que sua velocidade seja controlada, e
geralmente esse controle é feio manualmente através de botões. Com a tecnologia avançada de hoje, muitos
equipamentos tendem a ser controlados por computador. Seguindo essa tecnologia é que desenvolvemos este
projeto. A montagem é simples, mas é apartir deste princípio e acrescentando outros periféricos o projeto terá
várias outras utilidades, como controlar a velocidade de um ventilador, de uma esteira, etc...
Este projeto tem como principal função o controle de velocidade de motores DC, através de um
software que irá enviar e receber dados. Os dados enviados ao motor são para controle de sua velocidade, e os
dados recebidos são processados pelo software para informar ao usuário a posição e a velocidade em rpm do
motor.
No projeto são utilizados circuitos simples, dando mais ênfase ao software.
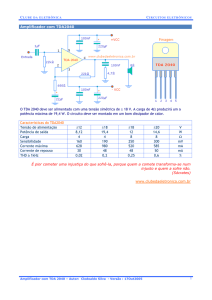
Na figura 1 temos o diagrama funcinal do projeto.
CVMDC
Controle de Velocidade do
Motor DC
Hardware
CVMDC
MOTOR
Fonte
Sensor
Figura 1 - Diagrama funcinal do projeto
3
UFLA - Universidade Federal de Lavras
DEX - Departamento de Ciências Exatas
Ciência da Computação
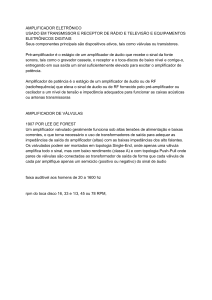
2. Diagrama em Blocos
Computador
(PC)
Interface
Paralela
INTERFACE
Motor
DC
Conversor
D/A
S
e
n
s
o
r
Figura 2 - Diagrama em blocos
2.1 Descrição de cada Bloco
Software - Este é o bloco onde está o programa de controle e estão todas as telas de apresentações, que
facilitam ao usúario o controle do motor. Pelo software o usúario pode escolher o sentido de rotação do motor,
aumentar e ou diminuir a velocidade do motor.
Interface - A interface é composta por um conversor D/A, um amplificador de corrente e um sensor. O
conversor D/A irá converter os sinais digitais enviados pelo computador em um sinal analógico, este está
representado por um rede resistores em escala R/2R. O amplificador de corrente foi feito utilizando um
amplificador operacinal, operando de duas formas, uma como um inversor de tensão e um como não inversor,
isto foi feito para que o motor girasse nos dois sentidos. Na saída do amplificador há dois transistores ligados
para fornecer corrente ao motor.
Sensor - O sensor foi acoplado ao eixo do motor para enviar informações ao software para que este informe a
velocidade e a posição do motor. O utilizou-se dois fotodiodos como sensores. Estes sensores estão dispostos
entre um disco perfurado, de forma que quando há um intervalo aberto o sensor envie um dado ao software.
Cada sensor está defasado de 90 graus um do outro.
3. Paralela
A paralela do PC é utilizada normalmente para ligação de periféricos, tal com a impressora. É através
dela que os dados transmitidos e recebidos. O padrão utilizado é Centronics, por isso existem linhas de dados e
linhas de controle de fluxo.
O padrão Centronics possui um conector de 25 pinos no total, veja a função dos pinos abaixo:
Existem três endereços específicos para a paralela, esses são: 03BCH, 0378H, 0278H. No projeto foi
utilizado o endereço: 03BCH para envio dos dados e 03BDH para leitura dos dados.
4
UFLA - Universidade Federal de Lavras
DEX - Departamento de Ciências Exatas
Ciência da Computação
4. Conversor D/A
Quando se trabalha com sistemas ddigitais basicamente só se utiliza dois níveis de tensões
representando os níveis lógicos 0 e 1.
No entanto muitas vezes torna necessário uma interface entre tensões que vriam continuamente no
tempo (tensões analógicas) com circuitos digitais, afim de que possa moldar essa tensão analógica em níveis
altos e baixos representando um número binário proporcional a tal tensão. Nesse caso necessita-se de um
conversor A/D ( Analógico/Digital).
Por outro lado, as vezes torna-se neessário converter um número codificado digitalmente num sinal de
tensão analógica cujo o valor seja proporcional a tal tensão. Nesse caso necessita-se de um conversor D/A
(Digital /Analógico)
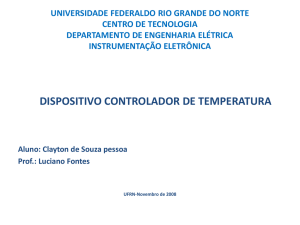
Basicamente tem-se os conversores D/A que utilizam resistores ponderados os que utilizamas
chamadas rede R/2R.
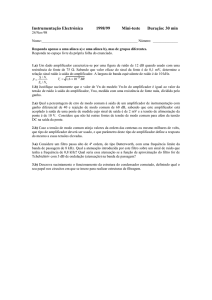
Como no projeto é utilizado o rede R/2R a figura 3 descreve o esquema da rede.
Vx
R
R
2R
R
2R
2R
B
C
D
2R
2R
2R
A
Figura 3 - Rede R/2R
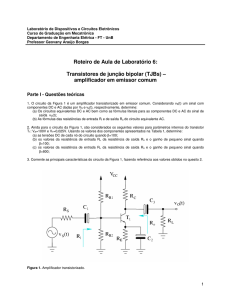
5. Amplificador Operacional
O amplificador operacinal é um amplificador cc de alto ganho utilizável de 0 até 1MHz. Ligando-se a
resistores externos, pode-se ajustar o ganho de tensão e a largura de banda do amplificdor operacional
dependendo das suas necessidades.
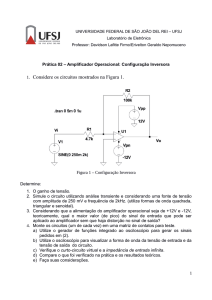
No projeto utilizou-se duas configurações básicas do amplificador operacional: um amplificador de
tensão inversora e um amplificador não-inversor de tensão.
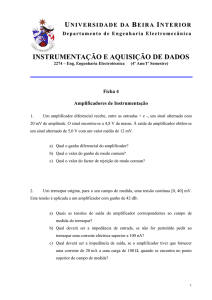
Um amplificador de realimentação de tensão não-inversor é aproximadamente um amplificador de
tensão ideal devido sua alta impedância de entrada, baixa impedância de saída, e ganho de tensão estável.
A figura 4 mostra o circuito básico para um amplificador de realimentação de tensão não-inversora.
Vcc
+
Vent
Vsaída
-Vee
R1
R2
Figura 4 - Amplificador com realimentação de tensão não inversora
5
UFLA - Universidade Federal de Lavras
DEX - Departamento de Ciências Exatas
Ciência da Computação
O ganho do amplificador é determinado pela equação:
Acl = (R1/R2)+1
A figura 5 mostra um amplificador de tensão inversor.
Rf
Rs
-
+
RL
Vent
Vsaída
Figura 5 - Amplificador de tensão inversora usando uma realimentação da tensão inversora
O ganho de tensão de malha fechada é igual:
Acl = - (Rf/Rs)
6. Fototransistor
Um fototransistor é um transistor de base aberta sensivel a luz. A figura 6a mostra um transistor com
a abase aberta . Aparece uma pequena corrente de coletor neste circuito. Visualize a corrente reversa produzida
por portadores produzidos termicamente no diodo coletor como um a fonte de corrente ideal em paralelo com a
junção coletor-base de um transistor ideal (figura 6b).
Pelo fato do condutor da base estar aberto, toda corrente reversa é forçada para dentro da base do
transistor. A corrente do coletro resultante é:
Iceo = Bcc . Ir
Isto quer dizer que a corrente do coletor é mais alta do que a corrente reversa inicial de um fator Bcc.
O diodo coletor é sensivel à luz bem como ao calor. Num fototransistor, a luz atravessa um janela e atinge a
junção coletor-base. À medida que a luz aumenta, Ir aumenta como também Iceo.
6
UFLA - Universidade Federal de Lavras
DEX - Departamento de Ciências Exatas
Ciência da Computação
Vcc
Vcc
Vcc
Vcc
Rc
Rc
Rc
Rc
(a)
( b)
(c)
(d)
Figura 6 - (a) Transistor com a base aberta
(b) Corrente reversa em paralelo com o diodo coletor
( c) Fototransistor
(d) Controlando a sensibilidade à luz
1. Transistor Darlington
Uma conexão Darlington na ligação em cascata de seguidores de emissor, tipicamente um par
semelhante ao da figura abaixo. A corrente de base do segundo transistor vem do emissor do primeiro
transistor. Portanto, o ganho de corrente entre a primeira base e o segundo emissor é:
β = β1+β2
Em outra palavras, os dois transistores têm um ganho total de corrente igual ao produto dos ganhos
individuais de corrente. A principal vantagem da conexão Darlington é a alta impedância de entrada olhando
para a base do primeiro transistor. Na figura 7 a impêdancia é de aproximadamente:
Zent(base) = βRe
Vcc
R1
Rs
Q1
Q2
Vs
Vsaída
R2
Re
(a)
7
UFLA - Universidade Federal de Lavras
DEX - Departamento de Ciências Exatas
Ciência da Computação
(b)
Figura 7 - a)Amplificador Darlington
b)Transistor Darlington
8
UFLA - Universidade Federal de Lavras
DEX - Departamento de Ciências Exatas
Ciência da Computação
2. Esquema Elétrico
9
UFLA - Universidade Federal de Lavras
DEX - Departamento de Ciências Exatas
Ciência da Computação
3. Funcionamento Geral
Os sinais enviados para paralela através do software são sinais digitais, ou seja, geram os sinais zero
ou um, para enviar apenas um sinal ao circuito analógico os sinais passam por um rede de resistores (rede
R/2R) que gera um sinal analógico correspondente aos sinais digitais. Este sinal vai para um amplificador
operacional. A configuração selecionada via software do amplificador operacional é que gera as tensões
positivas e negativas ao motor. Esta seleção é feita através do bit D4 da paralela. Quando este está em nível
lógico 1, o relé é acionado, fazendo com que a amplificador operacional opere como um amplificador inversor
de tensão, ou seja a tensão de saída é negativa, isto faz com que o motor gire no sentido anti-horário. Já um
nível lógico baixo no bit D4 da paralela, faz o amplificador operacional operar como um amplificador nãoinversor , ou seja, gere tensões positivas, e fazendo com que o motor gire no sentido horário.
Os sensores acoplados ao eixo do motor geram sinais que são enviados à paralela e lidos via software.
Este s sinais permitem calcular a velocidade do motor e verificar sua posição angular.
Para cálculo da velocidade utilizou-se um dos sensores e um disco com perfurações.
Foram contados o número de pulsos enviados pelo sensor durante 1 segundo. Como o disco possui 45
perfurações ou seja noventa intervalos em um volta. A velocidade é obtida contando-se o números de pulsos e
dividindo-os por 90, que é o números de intervalos dados em uma rotação. Como os pulsos foram obtido no
intervalo de 1 segundo, a velocidade obtida é em rotações por segundo, como visualizado no programa.
O sentido do motor é obtido monitorando-se o 2 sensores. Observou-se que no sentido horário o sensor
1 muda do estado 0 para1 primeiro, e no sentido anti-horário isto ocorre com o sensor 2. Observando esses
fatos, é que se pode determinar o sentido do motor.
4. Resultados obtidos
Tabela de velocidades fornecidas pelo software e calculadas.
Velocidade/software
1.39rps
1.47rps
Sentido Horário
Velocidade/calculada
20 voltas/15 segundos=1.33rps
50 voltas/35 segundos=1.43rps
Diferença
0.06
0.04
Velocidade/software
1.72rps
1.62rps
Sentido Anti-horário
Velocidade/calculada
20 voltas/12 segundos=1.67rps
50 voltas/33 segundos=1.57rps
Diferença
0.05
0.05
Tabela de velocidades
Velocidade Digital
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Sentido Horário
0
0
1.3
2.9
4.4
6.2
7.7
9.2
11.1
13.1
14.8
16.6
18.3
20.0
21.7
18.3
10
Sentido Anti-horário
0
0
1.3
3.2
4.8
6.9
8.9
11.1
12.7
14.9
16.1
18.7
20.5
22.7
24.4
26.7
UFLA - Universidade Federal de Lavras
DEX - Departamento de Ciências Exatas
Ciência da Computação
11