ELETRICISTA
MONTADOR
FUNDAMENTOS DE PROTEÇÃO
E COMANDO
1- 1 -
FUNDAMENTOS DE PROTEÇÃO E COMANDO
1
© PETROBRAS – Petróleo Brasileiro S.A.
Todos os direitos reservados e protegidos pela Lei 9.610, de 19.2.1998.
É proibida a reprodução total ou parcial, por quaisquer meios, bem como a produção de apostilas, sem
autorização prévia, por escrito, da Petróleo Brasileiro S.A. – PETROBRAS.
Direitos exclusivos da PETROBRAS – Petróleo Brasileiro S.A.
DUTRA FILHO, Getúlio Delano
Fundamentos de Proteção e Comando / CEFET-RS. Pelotas, 2008.
178p. 188il;
PETROBRAS – Petróleo Brasileiro S.A.
Av. Almirante Barroso, 81 – 17º andar – Centro
CEP: 20030-003 – Rio de Janeiro – RJ – Brasil
2
ÍNDICE
UNIDADE I ............................................................................................................................................. 12
1.1 Dispositivos de Comando Mecânicos .......................................................................................... 12
1.2 Dispositivos de Comando Eletromecânicos ............................................................................... 22
1.3 Dispositivos de Comando Mecânico Sensível a Variáveis Térmica ou Pressão ........................ 24
1.4 Dispositivos de Comando Eletrônico ........................................................................................... 25
1.5 Especificação dos Dispositivos de Comando .............................................................................. 30
UNIDADE II ............................................................................................................................................ 32
UNIDDE III.............................................................................................................................................. 36
3.1 Auxiliares para Relés de Impulso ................................................................................................ 37
UNIDADE IV ........................................................................................................................................... 40
4.1 Controles eletromecânicos de nível............................................................................................. 40
4.2 Simbologia Chaves de Nível........................................................................................................ 42
UNIDADE V ............................................................................................................................................ 44
5.1 Tipos de Relés de Tempo............................................................................................................ 44
UNIDADE VI ........................................................................................................................................... 47
6.1 Funcionamento do Contator ........................................................................................................ 48
6.2 Especificação ............................................................................................................................... 49
6.3 Comandos dos Contadores ......................................................................................................... 49
6.4 Supressão de Surtos de Tensão ................................................................................................. 50
6.5 Os Contatos Auxiliares ................................................................................................................ 50
6.6 Categorias de Emprego dos Contatores (conforme IEC 60947-1).............................................. 51
6.7 Exemplos do uso das categorias de emprego............................................................................. 52
6.8 Durabilidade Mecânica e Elétrica dos contatores........................................................................ 54
UNIDADE VII .......................................................................................................................................... 58
UNIDADE VIII ......................................................................................................................................... 60
8.1 - Função de um Dispositivo de Partida ........................................................................................ 61
8.2 - Composição de um Dispositivo de Partida................................................................................ 61
8.3 Definições das Coordenadas de Proteção - IEC 60 947-4.......................................................... 63
8.4 - Glossário.................................................................................................................................... 64
8.5 - Chave de Partida Direta Simples............................................................................................... 66
8.6 - Chave de Partida Direta Simples com Reversão ...................................................................... 70
8.7 Chave de Partida Indireta Estrela - Triângulo (Y-D) .................................................................... 73
8.8 - Chave de Partida Indireta Autocompensadora ou Compensadora........................................... 81
UNIDADE IX ........................................................................................................................................... 88
3
9.1 - Chave de Partida Soft-Starter / Stop ......................................................................................... 88
9.2 - Inversor de Freqüência............................................................................................................ 107
UNIDADE X .......................................................................................................................................... 131
10.1 Disjuntores ............................................................................................................................... 131
10.2 - Disjuntores Aplicados a Proteção de Motores Elétricos........................................................ 138
10.3 Relés de Proteção Contra Sobrecarga.................................................................................... 140
10.4 Relé de Sobrecarga Eletrônico ................................................................................................ 144
10.5 - Fusíveis.................................................................................................................................. 146
UNIDADE XI ......................................................................................................................................... 156
11.1 O Socorro às Vítimas............................................................................................................... 157
11.2 - Dispositivos DR...................................................................................................................... 158
11.3 Interruptor Diferencial .............................................................................................................. 163
11.4 Disjuntor Diferencial Seletivo ................................................................................................... 164
11.5 Ligação dos Dispositivos de Proteção por Corrente Residual ................................................ 165
11.6 Botão de Teste......................................................................................................................... 166
11.7 Montagem dos Dispositivos DR’s em Quadros de Distribuição .............................................. 167
UNIDADE XII ........................................................................................................................................ 168
UNIDADE XIII ....................................................................................................................................... 170
UNIDADE XIV....................................................................................................................................... 173
14.1 Normativa sobre Instalação de Geradores Particulares em Baixa Tensão............................. 173
14.2 Diagramas Unifilares Simplificados. ........................................................................................ 175
BIBLIOGRAFIA..................................................................................................................................... 177
4
LISTA DE FIGURAS
Figura 1.1 Acionamento de um Botão Pulsador - Dispositivo de Comando Mecânico ......................... 12
Figura 1.2 Dispositivo de Comando – Botão de Emergência ................................................................ 13
Figura 1.3 Simbologias dos Dispositivos de Comando Aplicado a Botoeiras ....................................... 13
Figura 1.4 Chave de Partida – Botoeiras de Liga, Desliga e Emergência............................................. 14
Figura 1.5 Esquema de Comando da Chave de Partida da figura anterior ........................................... 15
Figura 1.6 Botão Pulsador NF e Botão de Emergência ......................................................................... 15
Figura 1.7 Bloco de Contato NA , Base e Botão................................................................................... 16
Figura 1.8 Botão Pulsador - Bloco de Contato NA (verde) .................................................................... 16
Figura 1.9 Botão Pulsador - Bloco de Contato NF (vermelho) .............................................................. 16
Figura 1.10 Montagens Possíveis de um bloco de contato ou luminoso, entre outros ......................... 17
Figura 1.11 Dispositivo de Comando Mecânico – Manípulo tipo Alavanca ........................................... 17
Figura 1.12 Dispositivo de Comando Mecânico – Chaves tipo On - Off ............................................... 17
Figura 1.13 Dispositivo de Comando Mecânico – Manoplas ou Seletores Knob com posição fixa, com
retorno e chaveada ................................................................................................................................ 17
Figura 1.14 Dispositivo de Sinalização de Comando – Bloco sinaleiro ou Bloco Luminoso ................ 18
Figura 1.15 Dispositivo de Comando Mecânico – Botoeiras Pulsador com Retorno ou Chaveada..... 18
Figura 1.16 Identificação de botões segundo IEC 73 e VDE 0199........................................................ 19
Figura 1.17 Identificação de botões segundo IEC 73 e VDE 0199 (continuação)................................. 19
Figura 1.18 Identificação de sinaleiros segundo IEC 73 e VDE 0199 ................................................... 20
Figura 1.19 Dispositivo de Sinalização Visual - Simbologia e Valores de Tensão Usuais para Bloco
Sinaleiro.................................................................................................................................................. 20
Figura 1.20 Dispositivo de Sinalização Sonoro – Exemplo e simbologia de uma Buzina ..................... 21
Figura 1.21 Dispositivo de Sinalização Visual – Exemplo e simbologia de uma Sirene ....................... 21
Figura 1.22 Dispositivo Sinalização Visual e Sonoro – Exemplo e simbologia de uma Coluna Sinaleiro
com Buzina............................................................................................................................................. 21
Figura 1.23 Tipo Pino, Came Ou Apalpador Unidirecional .................................................................... 22
Figura 1.24 Tipo Rolete Articulado Ou Gatilho Unidirecional ................................................................ 22
Figura 1.25 Tipo Rolete Bi-direcional ..................................................................................................... 23
Figura 1.26 Simbologia Para Chave Fim – de – Curso com 1NA + 1NF............................................... 23
Figura 1.27 Tipo Pino, Came ou Apalpador Bi-direcional ...................................................................... 23
Figura 1.28 Termostato .......................................................................................................................... 24
Figura 1.29 Simbologia Termostato ....................................................................................................... 24
Figura 1.30 Pressostato Para Tubulação Pneumática .......................................................................... 25
5
Figura 1.31 Simbologia Pressostato ...................................................................................................... 25
Figura 1.32 Exemplo de ligações inadequadas com Sensores ............................................................. 26
Figura 1.33 Sensor Indutivo ................................................................................................................... 26
Figura 1.34 Sensor Capacitivo ............................................................................................................... 26
Figura 1.35 Sensor Fotoelétrico por Difusão ......................................................................................... 27
Figura 1.36 Sensor Fotoelétrico por Barreira......................................................................................... 27
Figura 1.37 Acionamento de um Sensor Fotoelétrico por Barreira........................................................ 27
Figura 1.38 Acionamento de um Sensor Fotoelétrico por Difusão ........................................................ 27
Figura 1.39 Montagem de um sensor a dois fios ................................................................................... 28
Figura 1.40 Montagem de um sensor a 3 fios........................................................................................ 28
Figura 1.41 Borne Relé .......................................................................................................................... 29
Figura 2.1 Posição 1 – Potência total igual a 2000W (2 resistores ligados em paralelo)...................... 32
Figura 2.2 Posição 2 – Potência total igual a 1000W (1 resistor ligado) ............................................... 32
Figura 2.4 Posição 3 – Potência Total igual a 500 W (2 resistores ligados em série)........................... 33
Figura 2.5 Acionamento de um Sistema de Refrigeração com o uso de uma Chave Comutadora ...... 33
Figura 2.6 Acionamento de resistores de aquecimento com o uso de uma Chave Comutadora ......... 34
Figura 2.7 Chave Seletora para uso em Amperímetro ou outros equipamentos .................................. 35
Figura 2.8 Chave Seletora para Voltímetro............................................................................................ 35
Figura 3.1 Relé de Impulso .................................................................................................................... 36
Figura 3.2 Simbologia Relé de Impulso Inversor com Contato Comutador........................................... 36
Figura 3.3 Simbologia Relé de Impulso Controle Centralizado com Contato Comutador..................... 37
Figura 3.4 Simbologia Relé de Impulso com Memória com Contato Simples ....................................... 37
Figura 3.5 Relés de Impulso Monopolar ................................................................................................ 38
Figura 3.6 Bipolar ................................................................................................................................... 38
Figura 3.7 Tripolar .................................................................................................................................. 38
Figura 3.8 Exemplo do uso de um relé de impulso monopolar com contato simples............................ 39
Figura 4.1 Chave de nível tipo pá rotativa. ............................................................................................ 41
Figura 4.2 Chave de nível com membrana. ........................................................................................... 41
Figura 4.3 Chave de nível do tipo bóia .................................................................................................. 42
Figura 4.4 Chave de Nível com 1NA + 1NF e Chave de Nível com Contato Comutador ..................... 42
Figura 4.5 Chave de Partida Direta Automática sendo acionada por uma Chave de Nível .................. 43
Figura 5.1 Simbologia: A -Relé de tempo com 1 comutador; B-Relé de tempo com 2 comutador;
C - Funcionamento Relé de Tempo com Retardo na Energização. ...................................................... 44
Figura 5.2 Simbologia: A- Relé de tempo com 1 comutador; B-Relé de tempo com 2 comutador
C - Funcionamento Relé de Tempo com Retardo na Desenergização ................................................. 45
Figura 5.3 Simbologia: A-Relé de tempo com 1 comutador; B-Relé de tempo com 2 comutador
C-Funcionamento Relé de Tempo com Impulso na Energização ......................................................... 45
6
Figura
5.4
Simbologia:
A
-
Relé
de
tempo
para
Chave
de
Partida
Y
–
D;
B-Funcionamento Relé de Tempo para Chave de Partida Y – D .......................................................... 46
Figura 5.5 Relés de Temporização ........................................................................................................ 46
Figura 6.1 Contator Eletromagnético ..................................................................................................... 47
Figura 6.2 Simbologia Contator Eletromagnético com 2 Contatos Auxiliares sendo 1NA + 1NF ......... 47
Figura 6.3 Análise dos Contatos de um Contator .................................................................................. 48
Figura 6.4 Nomograma de Estimação do Tempo da Durabilidade Elétrica do Contator....................... 55
Figura 6.5 Gráfico de Estimativa de Durabilidade Elétrica do Contator em Número de Manobras ...... 56
Figura 6.6 Contatores de Força para Manobra de Cargas, normalmente Motores ............................... 56
Figura 6.7 Bloco de Contatos Auxiliares para Montagem Frontal por Encaixe no Contator Principal .. 57
Figura 6.8 Contator Auxiliar para Comando – Somente Contatos Auxiliar de Comando NA e/ou NF .. 57
Figura 6.9 Contatores Montados numa Chave de Partida Y – D e numa Chave de Partida Reversora
................................................................................................................................................................ 57
Figura 7.1 Representação das Bobinas de um Transformador de Comando ....................................... 58
Figura 7.2 Transformador de Comando ................................................................................................. 59
Figura 8.1 Composição mínima para uma chave de partida ................................................................. 61
Figura 8.2 Comportamento da corrente e conjugado de um motor partindo a plena tensão ................ 67
Figura 8.3 Esquema de Força da Chave de Partida Direta no Modo Multifilar e no Modo Unifilar ....... 68
Figura 8.4 Esquema de comando da chave de partida direta respectivamente aos esquemas de força
anterior ................................................................................................................................................... 69
Figura 8.5 Esquema de força da chave de partida direta com reversão no modo multifilar e no modo
unifilar ..................................................................................................................................................... 71
Figura 8.6 Esquema de comando da chave de partida direta com reversão ........................................ 72
Figura 8.8 Ligação dos rolamentos ........................................................................................................ 75
Figura 8.9 Ligação dos enrolamentos de um Motor na Chave de Partida Y – D .................................. 76
Figura 8.10 Esquema de força da chave de partida y – d automática no modo multifilar e no modo
unifilar ..................................................................................................................................................... 77
Figura 8.11 Esquema de comando da chave de partida y – d automática............................................ 78
Figura 8.11 Esquema de força da chave de partida y – d automática com reversão no modo multifilar
................................................................................................................................................................ 79
Figura 8.12 Esquema de comando da chave de partida y – d automática com reversão..................... 80
Figura 8.13 Representação das bobinas de um autotransformador ligado em estrela ......................... 81
Figura 8.14 Valores de tensão de fase e de linha em um autotransformador ligado em Y................... 82
Figura 8.15 Esquemas de Ligação dos Enrolamentos .......................................................................... 83
Figura 8.16 Demonstração de cálculos.................................................................................................. 83
Figura 8.17 Exemplo da Chave de Partida Autocompensadora, no Modo Unifilar. .............................. 84
Figura 8.18 Esquema de Força da Chave de Partida Autocompensadora Automática no Modo
Multifilar e no Modo Unifilar.................................................................................................................... 85
7
Figura 8.19 Esquema de comando da chave de partida autocompensadora automática..................... 86
Figura 9.1 Tiristores SCR’s ligados em anti - paralelo, sendo 2 por fase, controle nas três fases ....... 89
Figura 9.2 Aceleração ............................................................................................................................ 90
Figura 9.3 Otimização para carga parcial .............................................................................................. 90
Figura 9.4 Desaceleraçào ...................................................................................................................... 91
Figura 9.5 Comportamento do conjugado acelerante de um motor com o uso de uma chave de partida
soft.......................................................................................................................................................... 91
Figura 9.6 Comportamento da corrente elétrica absorvida por um motor com o uso de uma chave de
partida soft.............................................................................................................................................. 92
Figura 9.7 Partida direta......................................................................................................................... 93
Figura 9.8 Partida estrela - triângulo ...................................................................................................... 93
Figura 9.9 Partida suave soft - starter ................................................................................................... 93
Figura 9.10 Soft – starter com controle em apenas uma fase ............................................................... 94
Figura 9.11 Soft – starter com controle em duas fases, com relé de by-pass e bimetálico contra
sobrecarga.............................................................................................................................................. 95
Figura 9.12 Soft – Starter com duas fases semi - controladas .............................................................. 96
Figura 9.13 Soft – starter com controle em três fases, com relé de by – pass e bimetálico contra
sobrecargas............................................................................................................................................ 97
Figura 9.14 Parametrização da soft – starter via potenciômetros ......................................................... 98
Figura 9.15 Parametrização da soft – starter via potenciômetros ......................................................... 99
Figura 9.16 Parametrização da soft – starter via software dedicado................................................... 100
Figura 9.17 Parametrização da soft – starter via IHM.......................................................................... 101
Figura 9.18 Soft – Starter Partindo um único motor............................................................................. 102
Figura 9.19 Soft – Starter Partindo Vários Motores simultaneamente................................................. 103
Figura 9.20 Soft – Starter Partindo Vários Motores em Seqüência ou Cascata.................................. 104
Figura 9.21 Partida em seqüência de 3 motores com apenas uma soft - starter ................................ 105
Figura 9.22 Soft – starter montada dentro do delta da ligação de um motor ...................................... 106
Figura 9.23 Blocodiagrama de um inversor de freqüência .................................................................. 109
Figura 9.24 Princípio de Funcionamento do Inversor de Freqüência Simplificada ............................. 111
Figura 9.25 Etapa de Retificação ......................................................................................................... 111
Figura 9.26 Etapa Retificação Completa ............................................................................................. 112
Figura 9.27 Etapa Pós Retificação ou Filtragem.................................................................................. 112
Figura 9.28 Inversor Tradicional........................................................................................................... 113
Figura 9.29 Inversor para tensão constante ou variável e a saída que depende da freqüência de
chaveamento dos transistores. ............................................................................................................ 114
Figura 9.30 Modulação por amplitude e por largura de pulso. ............................................................ 115
Figura 9.31 Torque e sobre-torque do motor ....................................................................................... 116
Figura 9.32 Performance do motor ...................................................................................................... 116
8
Figura 9.33 Princípio de funcionamento do PWM (modulação de largura de pulsos)......................... 117
Figura 9.34 Princípio de funcionamento do pwm senoidal (modulação de largura de pulsos senoidal)
.............................................................................................................................................................. 117
Figura 9.35 Forma de Onda da Tensão e Corrente Gerada por Controle por PWM Analisando uma
Fase...................................................................................................................................................... 118
Figura 9.36 Forma de Onda da Tensão e Corrente Gerada por Controle por PWM Analisando Três
Fases.................................................................................................................................................... 118
Figura 9.37 Diagrama do processo de obtenção da tensão e freqüência desejadas.......................... 119
Figura 9.38 Etapas do processo de obtenção de tensão e freqüência CA variável por PWM............ 121
Figura 9.39 Inversores com alimentação trifásica e saída trifásica ..................................................... 121
Figura 9.40 Ligação da força num inversor de freqüência com alimentação mono ou bifásica .......... 122
Figura 9.41 Ligação das entradas e saídas digitais, ligação das entradas analógicas, suas funções e
características ...................................................................................................................................... 123
Figura 9.42 Exemplo de ligação do comando num inversor de freqüência ......................................... 123
Figura 9.43 Controle em malha aberta da velocidade de um motor ca ............................................... 126
Figura 9.44 Controle de velocidade em malha aberta ou controle sensorless .................................... 126
Figura 9.45 Modo do controle de velocidade em malha aberta Controle Vetorial............................... 127
Figura 9.46 Controle em malha fechada da velocidade de um motor ca ............................................ 128
Figura 9.47 Controle de velocidade em malha fechada ou controle com encoder.............................. 128
Figura 9.48 Inversor de freqüência com realimentação de velocidade proporcionada através do sinal
gerado pelo encoder, e com sinal de posicionamento gerado por um resolver .................................. 128
Figura 9.49 Parametrização do inversor de freqüência via IHM.......................................................... 129
Figura 9.50 Parametrização do inversor via IHM................................................................................. 130
Figura 10.1 Funcionamento Disjuntor Limitador de Corrente .............................................................. 132
Figura 10.2 Curvas de disparo segundo a norma NBR IEC 60898 ..................................................... 135
Figura 10.3 Disjuntor Termo-magnético e suas partes constituintes................................................... 136
Figura 10.4 Disjuntores Tripolar ........................................................................................................... 137
Figura 10.5 Disjuntores Bipolar ............................................................................................................ 137
Figura 10.6 Disjuntor Monopolar .......................................................................................................... 137
Figura 10. Simbologia Disjuntor Termomagnético Tripolar.................................................................. 137
Figura 10.8 Representação esquemática de um disjuntor tripolar. ..................................................... 138
Figura 10.9 Curvas de Disparo da Ação de Sobrecarga e Ação de Curto-Circuito............................. 139
Figura 10.10 Disjuntores – Motor para Proteção de Motores .............................................................. 139
Figura 10.11 Simbologia Relé de Sobrecarga Bimetálico com 1 contato NA e 1 contato NF ............. 141
Figura 10.12 Relé de Sobrecarga Bimetálico ...................................................................................... 141
Figura 10.13 Relé de Sobrecarga Bimetálico ...................................................................................... 142
Figura 10.14 Curvas características típicas de disparo do Relé de Sobrecarga Bimetálico .............. 143
Figura 10.15 Relé de Sobrecarga Eletrônico ....................................................................................... 144
9
Figura 10.16 Disparador por Curto – Circuito de um Disjuntor ............................................................ 145
Figura 10.16 Aplicação e Designações dos Fusíveis Pela norma IEC 60269/NBR ............................ 147
Figura 10.17 Tipos de Fusíveis ............................................................................................................ 149
Figura 10.18 Fusíveis Tipo NH............................................................................................................. 152
Figura 10.19 Fusíveis Diazed............................................................................................................... 153
Figura 10.20 Fusíveis (miniatura) NEOZED ........................................................................................ 154
Figura 10.21 Simbologia Seccionador – Fusível Sob Carga ............................................................... 154
Figura 10.22 Simbologia Fusível.......................................................................................................... 154
Figura 10.23 Curvas de Limitação ....................................................................................................... 155
Figura 10.24 Curvas Tempo x Corrente............................................................................................... 155
Figura 11.1 Tipos de contato................................................................................................................ 156
Figura 11.2 Efeito fisiológico da corrente no corpo humano................................................................ 157
Figura 11.3 Dispositivos DR................................................................................................................. 159
Figura 11.4 Corrente diferencial-residual ............................................................................................. 159
Figura 11.5 Corrente de Fuga ocasionado por Falha de Isolação do Equipamento – Contato Indireto
.............................................................................................................................................................. 160
Figura 11.6 Princípio de Funcionamento dos DR’s.............................................................................. 160
Figura 11.7 Interruptor Diferencial........................................................................................................ 163
Figura 11.8 Disjuntor Diferencial Seletivo ............................................................................................ 164
Figura 11.9 Como Ligar no Esquema TN ............................................................................................ 165
Figura 11.10 Como Ligar no Esquema TT........................................................................................... 165
Figura 11.11 Funcionamento de um Botão de Teste de um DDR....................................................... 166
Figura 11.12 Quadro Metálico.............................................................................................................. 167
Figura 11.13 Quadro Plástico............................................................................................................... 167
Figura 13.1 Esquema de força da chave de partida direta no modo multifilar e no modo unifilar....... 171
Figura 13.2 Esquema de comando da chave de partida direta respectivamente aos esquemas de força
acima .................................................................................................................................................... 172
Figura 14.1 Intertravamento Rede Concessionária / Gerador Particular para Unidade Consumidora
Individual .............................................................................................................................................. 175
Figura 14.2 Intertravamento Rede Concessionária / Gerador Particular para Unidade Consumidora
Coletiva................................................................................................................................................. 176
10
APRESENTAÇÃO
Em todo setor industrial, do mais simples ao mais complexo sistema produtivo, há algum tipo
de máquina ou equipamento sendo acionado por motor, no qual o motor elétrico é o mais largamente
utilizado. Para que esses motores venham a desempenhar de maneira satisfatória o seu papel no
processo produtivo, ou seja, colocar alguma máquina e/ou em movimento, deve-se assegurar que o
mesmo irá funcionar de modo eficaz e – principalmente – seguro, tanto no que diz respeito à máquina
em si como para as pessoas que por ventura possam estar diretamente ou indiretamente envolvidas
na operação do equipamento.
Os motores elétricos são acionados (energizados) através de chaves de partida. As chaves
de partida podem ser do tipo manual – há intervenção direta do operador na comutação dos contatos
da chave, através de acionamento por esforço mecânico em uma manopla ou alavanca comutadora,
como por exemplo à chave tripolar tipo faca, chave de partida direta reversora manual, chave Y-D
manual e a chave compensadora manual; do tipo eletromagnéticas quando usados contatores para
estabelecer ou interromper a energia de alimentação do motor – há intervenção indireta ou inexiste
intervenção por parte do operador na comutação dos contatos da chave de partida. As chaves de
partida eletromagnéticas com o uso do contator podem ser acionadas por comando tipo semiautomático – o operador deve acionar uma botoeira para que, conforme a lógica de funcionamento do
esquema elétrico do equipamento seja acionado o motor; do tipo automática – quando o comando do
contator é feito diretamente através de dispositivos analógicos como termostatos, chaves de nível,
pressostatos, existência de tensão, temporizadores, etc; ou ainda associados a uma lógica de
funcionamento de um processo controlado por uma programação feita num PLC.
As chaves de partida manuais estão sendo cada vez mais substituídas por chaves de partida
eletromagnéticas por vários motivos, entre eles: o fato do comando de acionamento do motor poder
ser feito a distância, já que as chaves de partida manual são instaladas junto ao equipamento e não
possuir controle por instrumentação associada ao sistema; a segurança das chaves pelo fato das
chaves manuais terem um índice de proteção muito baixo e por vezes inexistir (IP00), como em
algumas chaves tripolar do tipo faca ainda comercializadas , entre outros. As chaves de partida
manuais ainda tem uso, porém, está mais restrito a pequenos produtores agrícolas e/ou
agropecuários e a processos produtivos de baixa complexidade.
Neste capítulo será abordado as chaves de partida manuais, eletromagnéticas convencionais,
como a chave de partida direta, direta reversora, chave de partida estrela – triângulo e a
compensadora, e a chave de partida eletrônica em estado sólido (soft-starter). O inversor de
freqüência não é propriamente uma chave de partida, salvo raras aplicações muito específicas, e
também será abordado.
11
I - DISPOSITIVOS DE COMANDO
Um dispositivo de comando consiste num equipamento sensível a uma variável, e que sobre a
ação da variação dessa variável muda o estado ou nível da saída em relação à entrada, mudando um
estado lógico dentro de um circuito ou sistema.
Segundo a NBR 5459 (Terminologia Manobra e Proteção de Circuitos) Chave ou Dispositivo
de Comando: dispositivo auxiliar por meio do qual se atua sobre o circuito de comando de um
dispositivo de manobra.
1.1 Dispositivos de Comando Mecânicos
Os dispositivos de comando mecânicos consistem em
equipamentos que sob a ação
mecânica muda o estado ou nível da saída em relação à entrada. É o caso das botoeiras ou botão
pulsador, manoplas, pedais, interruptores simples, alavancas de acionamento, manípulos, seletoras,
entre outros, sendo esses dispositivos com ou sem retorno por mola, como também com ou sem
travamento. Quando esses dispositivos possuem na entrada um sinal elétrico, ou uma grandeza
elétrica, como tensão elétrica (d.d.p) e quando acionadas por ação mecânica, ou seja, o acionamento
manual por intervenção humana (aperto) o sinal da saída muda em relação ao da entrada. No
exemplo abaixo têm-se o acionamento de uma botoeira, que quando sob ação de esforço mecânico
(apertar a botoeira), energiza a lâmpada; quando o esforço é cessado a lâmpada é desenergizada.
Nesse caso a botoeira é chamada de botão pulsador, pois há o retorno do contato por ação de mola.
Figura 1.1 Acionamento de um Botão Pulsador - Dispositivo de Comando Mecânico
12
Figura 1.2 Dispositivo de Comando – Botão de Emergência
1.1.1 Simbologias dos Dispositivos de Comando Aplicado a
Botoeiras
Todos dispositivos e equipamentos elétricos sejam eles para manobra, proteção,
comutação, seccionamento, comando, transformação de energia ou potencial, etc, tem as suas
conexões de entrada e saída, quando possuem saída, identificadas normalmente com números e/ou
letras. Os números que acompanham as conexões das botoeiras identificam qual contato é o
normalmente aberto (NA ou NO – normally open) e qual é o normalmente fechado (NF ou NC –
normally closed). Os números 1 e 2, identificam os bornes da conexão do contato NF, e os número 3
e 4 identificam os bornes de conexão do contato NA.
Botão Pulsador NA
Botão Pulsador NF
Botão de Emergência com Trava
Figura 1.3 Simbologias dos Dispositivos de Comando Aplicado a Botoeiras
13
O botão pulsador NF possui o mesmo bloco de contato do botão de emergência, a única
diferença é a forma externa do botão. Numa situação de emergência fica mais fácil identificar o botão
de emergência do que o botão pulsador NF, montados na porta do painel. Segundo a NBR 5459
(Terminologia Manobra e Proteção de Circuitos) botoeiras são chaves de comando cujos contatos são
acionados pela pressão manual de um ou mais botões, que acumulam energia em molas para o seu
retorno, imediato ou posterior,à posição inicial.
Botão Desliga (NF)
Botão de Emergência (NF)
Botão Liga (NA)
Figura 1.4 Chave de Partida – Botoeiras de Liga, Desliga e Emergência
14
Figura 1.5 Esquema de Comando da Chave de Partida da figura anterior
No esquema de comando, onde estão montados / inseridos os contatos das botoeiras, note
que o bloco de contato do botão de desliga é igual ao bloco de contato do emergência.
Botão Pulsador NF
Botão de Emergência
Figura 1.6 Botão Pulsador NF e Botão de Emergência
As botoeiras são constituídas basicamente em três partes. O bloco de contato, onde há
os contatos NA e/ou NF; a base onde o bloco de contato e a botoeira são fixadas, e o botão em si,
que é a parte onde o operador tem acesso para efetuar a comutação do contato do mesmo.
15
Bloco de Contato NA
Base
Botão
Figura 1.7 Bloco de Contato NA , Base e Botão
Os blocos de contato, além de possuírem a numeração referente ao tipo de contato, NA
ou NF, também possuem a cor que identifica se o bloco de contato é NA ou NF. Blocos de contato
com contato NA possuem a cor verde, já os blocos de contato com contato NF possuem a cor
vermelha.
Figura 1.8 Botão Pulsador - Bloco de Contato NA (verde)
Figura 1.9 Botão Pulsador - Bloco de Contato NF (vermelho)
A composição de um bloco pode ser tanto para montagem de um contato, como para
montagem de um luminoso. Quando montado um bloco de contato, a especificação do mesmo é
definida como botão ou botoeira + base de montagem + com X(número) bloco de contato NA e/ou NF.
Quando montado um bloco luminoso, a especificação do mesmo é definida como sinaleiro luminoso
com espelho cor (verde, amarelo, azul, vermelho, entre outros conforme a função) + base de
montagem + lâmpada tipo (incandescente ou led) + tensão da lâmpada (12 24 ou 48Vdc, ou, 110 ou
220 Vac).
16
Figura 1.10 Montagens Possíveis de um bloco de contato ou luminoso, entre outros
O acionamento do contato pode ser de várias maneiras, como botoeiras, chaves on-off,
manípulos tipo alavanca, manoplas com posição fixa ou com retorno, entre outros.
Figura 1.11 Dispositivo de Comando Mecânico – Manípulo tipo Alavanca
Figura 1.12 Dispositivo de Comando Mecânico – Chaves tipo On - Off
Figura 1.13 Dispositivo de Comando Mecânico – Manoplas ou Seletores Knob com posição fixa, com retorno e chaveada
17
Figura 1.14 Dispositivo de Sinalização de Comando – Bloco sinaleiro ou Bloco Luminoso
Figura 1.15 Dispositivo de Comando Mecânico – Botoeiras Pulsador com Retorno ou Chaveada
As botoeiras, assim como os sinaleiros luminosos, tem suas cores padronizadas, segundo um
estado ou função dentro de um circuito de comando ou sinalização.
18
Figura 1.16 Identificação de botões segundo IEC 73 e VDE 0199
Figura 1.17 Identificação de botões segundo IEC 73 e VDE 0199 (continuação)
Observação: as botoeiras que possuem mais de um bloco de contato, ou no mesmo bloco de
contato, sendo um contato NA e outro NF, quando pressionado ou cessado a pressão sobre o botão,
ocorre sempre a abertura do contato fechado e depois o fechamento do contato aberto, ou seja, há
um intervalo de tempo em que os dois contatos estão abertos.
19
1.1.2 Dispositivos de sinalização visual e sonoro
Os blocos sinaleiros ou luminosos são usados para a sinalização de eventos, como estado de
um dispositivo ou máquina tanto em situações normais quanto anormais tais como, falha, ligado e
desligado, entre outros, tendo uma cor referente a cada tipo de ocorrência. Para indicar um estado de
funcionamento usam-se lâmpadas, buzinas e sirenes.
Figura 1.18 Identificação de sinaleiros segundo IEC 73 e VDE 0199
Figura 1.19 Dispositivo de Sinalização Visual - Simbologia e Valores de Tensão Usuais para Bloco Sinaleiro
20
Assim como qualquer dispositivo elétrico, as sirenes e buzinas devem ser especificadas
conforme a tensão no qual será aplicada na mesma, seja em tensão CA ou CC.
Figura 1.20 Dispositivo de Sinalização Sonoro – Exemplo e simbologia de uma Buzina
Figura 1.21 Dispositivo de Sinalização Visual – Exemplo e simbologia de uma Sirene
Figura 1.22 Dispositivo Sinalização Visual e Sonoro – Exemplo e simbologia de uma Coluna Sinaleiro com Buzina
21
1.2 Dispositivos de Comando Eletromecânicos
Os dispositivos de comando eletromecânicos caracterizam por não haver interferência
manual pela ação do operador para a comutação do bloco de contato NA e/ou NF do dispositivo. São
usados, normalmente para detectar uma posição fixa de um cilindro, haste, guia, entre outros, sendo
que há contato entre o dispositivo de comando e o dispositivo acionador. Também são chamado de
sensores eletromecânico ou chaves fim – de – curso. O uso das chaves fim – de – curso são
normalmente em casos onde não há uma freqüência entre acionamento, ou seja, não possui um alto
número de acionamentos por hora, por tratar-se de um dispositivo com partes móveis.
Há vários tipos de chaves fim – de – curso, o que determina a diferença entre eles são o
modo do acionamento (haste, rolete, alavanca, pino) e o número de contatos NA e NF.
Segundo a NBR 5459 Chave fim-de-curso: Chave de posição que opera quando uma ou mais
partes determinadas do equipamento controlado atingem o final de seu curso normal.
1.2.1 Tipos de Chaves Fim – de – Curso
Figura 1.23 Tipo Pino, Came Ou Apalpador Unidirecional
Figura 1.24 Tipo Rolete Articulado Ou Gatilho Unidirecional
22
Figura 1.25 Tipo Rolete Bi-direcional
Figura 1.26 Simbologia Para Chave Fim – de – Curso com 1NA + 1NF
Figura 1.27 Tipo Pino, Came ou Apalpador Bi-direcional
23
1.3 Dispositivos de Comando Mecânico Sensível a
Variáveis Térmica ou Pressão
Os dispositivos de comando mecânicos acionados pela variação térmica, são chamados
de termostato, e são usados quando se necessita que algum dispositivo seja acionado ou desligado
em função de uma temperatura de trabalho de um equipamento ,ou sistema, pré-ajustado. Seu
princípio de funcionamento baseia-se na deformação de lâminas bimetálicas (duas lâminas unidas,
sendo dois metais diferentes, ou seja, valores de coeficiente de dilatação diferentes). São largamente
usados no controle de temperatura em sistemas de refrigeração (como numa simples geladeira ou
congelador doméstico) e aquecimento, para comandar o acionamento ou desligamento de bombas,
compressores, ventiladores, abertura ou fechamento de válvulas, sinalização de falhas, etc. Os
dispositivos de comando mecânicos acionados pela variação de pressão, são chamados de
pressostato, e são usados quando se necessita que algum dispositivo seja acionado ou desligado em
função de uma pressão de trabalho de um equipamento, ou sistema, pré-ajustado. Seu princípio de
funcionamento baseia-se na deformação de um diafragma quando esse é exposto a uma determinada
pressão. São usados no controle de pressão em tubulações, vasos de pressão, sucção e recalque de
bombas, sucção e descarga de compressores, entre outros, em sistemas onde se necessita controlar
a pressão. São usados para acionar ou desligar bombas, compressores, abertura ou fechamento de
válvulas, sinalização de falhas, entre outros, em sistemas hidráulicos e pneumáticos, por exemplo.
Figura 1.28 Termostato
Figura 1.29 Simbologia Termostato
24
Figura 1.30 Pressostato Para Tubulação Pneumática
Figura 1.31 Simbologia Pressostato
1.4 Dispositivos de Comando Eletrônico
Sempre que se necessita detectar peças, partes móveis de uma máquina, posição de
cilindros, contar revoluções de uma engrenagem, entre outros, e que não há ou que não deva existir
há possibilidade de contato entre o dispositivo acionador e o dispositivo de comando, são usados
sensores do tipo eletrônico. Há vários tipos de sensores eletrônicos como os sensores capacitivos,
magnéticos, indutivos e os fotoelétricos. Cada sensor tem uma particularidade em relação ao seu uso.
O sensor capacitivo detecta qualquer tipo de material, sendo utilizados para detectar a aproximação
de materiais orgânicos, plásticos, pós, líquidos, madeiras, papéis, metais, entre outros. Os sensores
indutivos são utilizados exclusivamente para detecção de materiais metálicos, sendo classificados
entre ferrosseletivos (não detectam materiais como latão, alumínio ou cobre) e os não –
ferrosseletivos (não detectam materiais como aço ou aço inox do tipo ferroso). Sensores óticos ou
fotoelétricos são sensores capazes de detectar a presença de um acionador através da emissão e
recepção de luz. Sensores magnéticos detectam apenas materiais ou peças que possuam campo
magnético, como eletroímã ou imãs naturais. Diferente dos dispositivos de comando mecânicos e
eletromecânicos vistos anteriormente, alguns sensores quando acionados liberam na saída sinais de
tensão conforme o tipo do mesmo. Há basicamente 3 tipos. Os do tipo CA ou CC a dois fios, que
quando acionados liberam o sinal de entrada, sendo este sempre o potencial, que além de ser o sinal
da saída serve para alimentar o sensor. Os do tipo NPN que são ligados entre positivo e negativo de
25
uma fonte e liberam na saída para a carga o potencial negativo. E os PNP que são ligados entre o
positivo e negativo de uma fonte e liberam na saída para a carga o potencial o positivo.
Um sensor quando usado para comandar um outro dispositivo, seja ele com teor indutivo,
capacitivo ou resistivo, nunca aciona a carga diretamente. Sempre é usado para tal, o sensor acionar
um relé de comando, que possui baixa corrente de acionamento, e o contato do relé de comando é
que aciona a carga a ser manobrada.
Figura 1.32 Exemplo de ligações inadequadas com Sensores
1.4.1 Simbologia de Sensores
Figura 1.33 Sensor Indutivo
Figura 1.34 Sensor Capacitivo
26
Figura 1.35 Sensor Fotoelétrico por Difusão
Figura 1.36 Sensor Fotoelétrico por Barreira
Figura 1.37 Acionamento de um Sensor Fotoelétrico por Barreira
Figura 1.38 Acionamento de um Sensor Fotoelétrico por Difusão
27
Sensores a dois fios: os sensores CA ou CC de dois fios devem ser ligados em série com a
carga. Neste tipo de sensor é importante observar que a alimentação do circuito é feita através da
própria carga, portanto não é recomendado para acionar cargas eletrônicas com corrente de
manutenção muito baixa.
Figura 1.39 Montagem de um sensor a dois fios
Sensores de 3 ou 4 fios: os sensores CA ou CC de três fios utilizam dois fios para a
alimentação e outro fio para saída. Os sensores de quatro fios, utilizam dois fios para a alimentação e
dois fios para saída. Nesse tipo de sensor a carga é ligada entre a saída do sensor e o neutro e são
encontrados, normalmente, para tensões de 100 a 250 Vac, e de 12 a 48 Vdc.
Figura 1.40 Montagem de um sensor a 3 fios
28
Sempre que se fala em ligar a carga na saída de um sensor, a carga pode tratar-se de liberar
um sinal, a partir da saída do sensor, normalmente a uma entrada digital de um CLP ou a bobina de
um relé auxiliar de comando.
Figura 1.41 Borne Relé
a – borne relé (deve ser indicado por seta o borne relé conforme representado no arquivo em DOC)
b - Ligação de Um Motor Trifásico Acionado Por Um Sensor CC a Dois Fios
1.4.2 Ligação de um Motor Trifásico Acionado por um Sensor CC a
dois fios
O sensor aciona um relé auxiliar de comando Ka, que possui uma corrente de
acionamento muitas vezes menor do que a corrente de acionamento da bobina do contator de
manobra K6. Note que é montado em paralelo com Ka (Vdc) um diodo, sendo que, o diodo está
montado dessa forma para funcionar como um supressor de sobretensão, pois, sempre que é
desacionado uma bobina de um contator ou relé, por serem os mesmo com teor indutivo, há um
surgimento de uma força contra eletromotriz, o que poderia ocasionar uma corrente inversa, no qual o
sentido seria em direção a fonte, no caso o sensor. Da mesma maneira é montado um supressor de
sobretensão montado em paralelo com a bobina de K6 (Vac), sendo normalmente usado um resistor e
um capacitor em série ou um varistor.
29
1.5 Especificação dos Dispositivos de Comando
A especificação de qualquer dispositivo de comando, seja ele: mecânico como as botoeiras;
eletromecânico como as chaves fim – de – curso; sensíveis a temperatura ou pressão como os
termostatos e pressostatos; eletrônicos como os sensores e seus tipos consiste em determinar e
especificar:
1.5.1 Botoeiras
Número de bloco de contatos com o número de contato NA e NF;
Tipo de acionador, ou tipo do botão, se tipo soco (emergência) ou pulsador, se com trava ou
não, se com chaveamento ou não, se manípulo com o número de posições, se manopla com o
número de posições, se com posição fixa ou retorno por mola, e a cor dos mesmos.
Para botoeiras: os blocos de contatos são fabricados, dependendo do fabricante, com um
único contato ou com dois contatos sendo.: um bloco de contato com apenas um contato 1NA ou
1NF; um bloco de contato com dois contatos podem ser ou com 1NA+1NF, ou 2NA ou 2NF.
1.5.2 Sinaleiros
Cor do espelho do sinaleiro, ou cor da lâmpada do sinaleiro;
Tipo de lâmpada, se Led ou Incandescente;
Tensão da lâmpada se para Vdc ou Vac;
1.5.3 Chaves fim – de – curso
Normalmente as chaves fim – de – curso possuem apenas 2 contatos num mesmo bloco,
podendo ser 1NA + 1NF, ou 2NA ou 2NF.
Tipo do acionador, se rolete, pino, haste, se articulado ou não, se unidirecional ou bidirecional.
30
1.5.4 Termostato ou Pressostato
Faixa de ajuste: para termostato a temperatura, sendo a faixa da escala e a unidade se graus
Celsius, Kelvin ou Fahrenheit; para pressostato, sendo a faixa da escala e a unidade se em Bar, Psi,
Pascal, Kgf/cm2;
Corrente nominal do contato, sendo normalmente um contato comutador, também chamado
inversor.
1.5.5 Sensores
Tipo do Sensor: se série (2fios), NPN ou PNP, conforme a carga ou sinal a ser acionada ou
enviado;
Material a ser detectado e onde será detectado, para determinar se capacitivo, indutivo ou
magnético.
Número de saídas, se uma (2 fios – série, ou 3 fios NPN ou PNP), duas (4 fios NPN ou PNP)
ou 3 saídas (5 fios NPN ou PNP), se alimentado em Vdc ou Vca; distância sensora nominal.
A corrente que um contato da botoeira, do termostato ou pressostato, ou da chave fim – de –
curso suporta, normalmente não ultrapassa os 5A. Já a corrente máxima que percorre o sensor,
quando acionado, normalmente, não ultrapassa a 1A.
31
II - CHAVES SELETORAS OU COMUTADORAS
É uma chave que possibilita a comutação elétrica entre os seus terminais de ligação. É usado
em aparelhos de ar condicionado, fogões , fornos, aquecedores elétricos. Usado em painéis para
comutar a ligação dos TC’s, para verificação da corrente em cada fase, e TP’s, para verificação da
tensão de fase e tensão de linha. São fabricadas chaves seletoras para até 10A, sendo muitas delas
usadas para a ligação de compressores usados em ar condicionado residenciais, de ventilador e
exaustores, de resistores elétrico usados para aquecimento. Um uso da chave seletora é em sistemas
de aquecimento, que conforme a posição da chave há a variação da ligação entre os terminais e com
isso consegue-se uma série de variações nos valores de potência do aquecedor.
Figura 2.1 Posição 1 – Potência total igual a 2000W (2 resistores ligados em paralelo)
Figura 2.2 Posição 2 – Potência total igual a 1000W (1 resistor ligado)
32
Figura 2.4 Posição 3 – Potência Total igual a 500 W (2 resistores ligados em série)
Figura 2.5 Acionamento de um Sistema de Refrigeração com o uso de uma Chave Comutadora
33
Figura 2.6 Acionamento de resistores de aquecimento com o uso de uma Chave Comutadora
Com o uso do comutador usado para acionar os resistores R1 e R2, e conectando
externamente os terminais 3 e 4 é possível e conforme a tensão aplicada temos, supondo R1 = R2:
Posição 1: temos a potência total proporcional a R1xR2 / R1+R2 (2 resistores ligados em
paralelo); maior potência. (Ex: 5000W)
Posição 2: temos a potência total proporcional a R1, conforme a tensão aplicada; potência
média (Ex: 2500W)
Posição 3: temos a potência total proporcional a R1 + R2 (2 resistores ligados em série);
menor potência. (Ex: 1250W)
Sendo que:
U=RXI
P=UXI
U = tensão em Volts;
R = resistência elétrica em Ohms;
I = corrente elétrica em Ampéres;
P= potência aparente em Volt – Ampéres;
34
Figura 2.7 Chave Seletora para uso em Amperímetro ou outros equipamentos
Figura 2.8 Chave Seletora para Voltímetro
35
III - CHAVES OU RELÉS DE IMPULSO
Os relés de impulso, chaves de impulso, relés de retenção, ou ainda telerruptores, são
dispositivos para o comando de circuitos elétricos, principalmente usados em sistemas de iluminação
de ambientes.
Os seus contatos são comutados através de pulsos elétricos emitidos a partir de um ou mais
pontos de comando, feitos a partir de botão pulsadores, sendo que o relé permanece acionado até
receber outro pulso, quando é desligado. Funções incorporadas ou adicionais permitem a operação
através de comandos mantidos e controles centralizados ou locais. Normalmente são fabricados para
calibres entre 5 a 32 A.
Figura 3.1 Relé de Impulso
Relé de Impulso Inversor : o relé de impulso inversor, normalmente possui apenas um pólo,
sendo o contato do tipo inversor ou comutador, ou seja, um ponto comum e duas saídas, sendo um
NA e outro NF. Pulso em A1 liga, outro pulso em A1 desliga.
Figura 3.2 Simbologia Relé de Impulso Inversor com Contato Comutador
36
Relé de Impulso Controle Centralizado: relé de impulso que incorpora o controle
centralizado enquanto conserva a possibilidade inicial de ordens de pulso locais. Pulso no borne ZA
liga, pulso no borne ZE desliga. Pulso no borne ZE liga, pulso no Borne ZA desliga.
Figura 3.3 Simbologia Relé de Impulso Controle Centralizado com Contato Comutador
Relé de Impulso com Memória: incorpora o controle através de uma ordem mantida por um
interruptor de duas posições podendo ser através de uma chave comutadora, interruptor horário,
termostato.
Figura 3.4 Simbologia Relé de Impulso com Memória com Contato Simples
3.1 Auxiliares para Relés de Impulso
Auxiliar para retardo de tempo: bloco auxiliar que automaticamente retorna o telerruptor ao
seu estado inicial após um período de tempo ajustável de 1 segundo a 10 horas. A contagem do
tempo inicia quando o dispositivo fecha o contato.
Auxiliar para controle passo a passo: bloco que associado a dois telerruptores, permite a
operação em cascata e passo a passo por pressões sucessivas nos pulsadores de comando. O ciclo
é o que segue:
1º pulso: Relé 1 fechado / Relé 2 aberto,
2º pulso: Relé 1 aberto / Relé 2 fechado,
3º pulso: Relé 1 e Relé 2 fechados,
4º pulso: Relé 1 e Relé 2 abertos,
5º pulso: Relé 1 fechado / Relé 2 aberto; o próximo pulso reinicia a seqüência a partir do 1º
pulso.
37
Auxiliar para pulsadores luminosos: bloco auxiliar que evita o acionamento indesejado dos
telerruptores quando controlados por pulsadores luminosos sendo a corrente dos mesmos superior a
3 mA (esta corrente é suficiente para manter energizada à bobina).
Auxiliar para controle centralizado: bloco auxiliar que permite o controle centralizado de um
conjunto de telerruptores controlando redes separadas, enquanto conserva a possibilidade de
comandar cada telerruptor localmente. Permite indicação remota do status mecânico de cada relé.
Sendo o contato auxiliar para 6 A - 240 V CA (sendo cos PHI = 1).
Auxiliar para controle centralizado em vários níveis: bloco auxiliar que permite o controle
centralizado de vários conjuntos de telerruptores, enquanto conserva a possibilidade do comando
local de cada telerruptor e o controle centralizado por nível (conjuntos de telerruptores).
Figura 3.5 Relés de Impulso Monopolar
Figura 3.6 Bipolar
Figura 3.7 Tripolar
38
A
B
D
C
E
Figura 3.8 Exemplo do uso de um relé de impulso monopolar com contato simples
Lógica de Funcionamento:
a) Dispositivos em repouso, não há acionamento de nenhum componente;
b) Acionamento do botão pulsador S, ocorrendo a energização da bobina do Ki,
conseqüentemente energização da lâmpada H, com o fechamento do contato de Ki (relé de impulso
monopolar contato simples);
c) Cessamento do esforço sobre o botão pulsador S, porém Ki permanece retendo o seu
contato, conseqüentemente H permanece energizada;
d) Acionamento do botão pulsador S, ocorrendo um novo pulso sobre a bobina de Ki, fazendo
com que haja a abertura do seu contato, conseqüentemente desenergizando H.
e) Estado para um novo ciclo de acionamento.
39
IV - CHAVES DE NÍVEL
O controle de nível está presente nas mais simples rotinas de nosso dia a dia. O controle do
suprimento de água para o nosso consumo residencial, para a caixa de descarga, para a reserva e
abastecimento geral de um bairro ou cidade, entre outros. No âmbito comercial e industrial apresenta
fundamental importância no controle de estoques e planejamento de produção de produtos e serviços,
pois a armazenagem de líquidos, sólidos e graneis, servem de suprimento destes produtos para
fabricação e comercialização. As principais finalidades do controle de nível são: avaliação de
estoques em tanques de armazenagem; controle de processos contínuos, onde sejam necessários
volumes de líquidos em acumulação temporária ou com tempo de permanência.
4.1 Controles eletromecânicos de nível
O sensor eletromecânico é utilizado em processos de armazenagem ou transporte de
materiais sólido ou granulado, principalmente em indústrias de plásticos, minérios, alimentícias,
químicas, entre outras. Quando acionado o contato da chave de nível, o mesmo pode energizar
diretamente uma carga, ou enviar um sinal para sinalização, ou para um CLP, conforme o tipo e a
capacidade nominal de condução de corrente do contato, que normalmente não passa de 5A.
40
4.1.1 Chave de nível do tipo pá rotativa
O funcionamento baseia-se no giro de um motor síncrono que possui acoplada ao seu eixo
uma pá. A pá fica girando e se ocorrer um bloqueio do movimento em função de presença de
material, um mecanismo interno aciona contatos cujo sinal pode ser utilizado em um circuito de
sinalização ou controle de nível. No momento que o movimento é bloqueado o motor é desligado
automaticamente, evitando que o mesmo trabalhe enquanto a pá estiver bloqueada. Assim que o
movimento da pá é liberado o motor volta a funcionar e os contatos com o sinal são desacionados.
Figura 4.1 Chave de nível tipo pá rotativa.
4.1.2 Chave de nível com membrana
O funcionamento ocorre através de uma membrana flexível que ao ser pressionada pelo
material armazenado aciona contatos cujo sinal pode ser utilizado em dispositivos de sinalização ou
controle.
Figura 4.2 Chave de nível com membrana.
41
4.1.3 Chaves de nível do tipo bóia
O funcionamento das chaves tipo bóia baseia-se na posição de uma bóia. A bóia está
fisicamente ligada a uma chave e conforme o nível ela aciona ou não o contato. Ao ser acionada, a
chave ativa contatos cujo sinal pode ser utilizado para sinalização ou controle, para acionar a bobina
de um contator, enviar um sinal a uma entrada de um CLP, ou em alguns casos, acionar diretamente
pequenas cargas.
As chaves do tipo bóia são empregadas principalmente nas indústrias têxtil,
química e alimentícia.
Figura 4.3 Chave de nível do tipo bóia
4.2 Simbologia Chaves de Nível
Figura 4.4 Chave de Nível com 1NA + 1NF e Chave de Nível com Contato Comutador
Contato Comutador: Os contatos comutadores ou inversores são usados quando se tem na
saída, cargas acionadas com o mesmo valor de tensão. Quando com um único dispositivo se deseja
realizar o acionamento de dois dispositivos, com valores de tensão diferentes, são usados os
dispositivos que possuem contatos distintos.
42
Figura 4.5 Chave de Partida Direta Automática sendo acionada por uma Chave de Nível
43
V - RELÉ TEMPORIZADOR
Relés de tempo ou temporizadores são dispositivos usados para o controle da abertura ou
fechamento de um contato auxiliar para comando, em função de um tempo pré – ajustado. São
fabricados, normalmente, para um tempo de ajuste de até 25 minutos. Utilizado na automação de
máquinas e processos industriais, especialmente em sequenciamento, interrupções ou habilita de
comandos em chaves de partida. Há também os relés horários ou semanais, porém seu uso é mais
usual no comércio ou em residências, para energização de circuitos de iluminação. Quando se
necessita um controle ou contagem de tempo na escala de horas, normalmente esse procedimento é
feito com um controlador totalizador horário, ou com o auxilio de um CLP.
5.1 Tipos de Relés de Tempo
Há basicamente 6 tipos de relé de tempo mais usuais, para diferentes aplicações. O relé de
tempo com retardo na energização; relé de tempo com retardo na desenergização; relé de tempo com
impulso na energização;relé de tempo para chaves de partida Y – D; relés de tempo cíclicos; e os
relés de tempo biestáveis.
Relé de Tempo com Retardo na Energização: após a energização do relé, inicia-se a
contagem do tempo ajustado no dial. Decorrido este período ocorrera a comutação dos contatos de
saída, os quais permaneceram neste estado até que a alimentação sobre a bobina do relé seja
interrompida.
B
A
C
Figura 5.1 Simbologia: A -Relé de tempo com 1 comutador; B-Relé de tempo com 2 comutador;
Funcionamento Relé de Tempo com Retardo na Energização.
44
C-
Relé de Tempo com Retardo na Desenergização: após a energização do relé, os contatos de
saída são comutados instantaneamente. Ao ser desenergizado a bobina do relé iniciará a contagem
do tempo ajustado no dial, e após a contagem do tempo, os contatos de saída retornam a sua
condição original. Esse relé só pode ser usado para tempos não maiores que 10 minutos, por
limitação do mesmo, sendo que o tempo em que a bobina recebe alimentação, normalmente –
dependendo do fabricante – não deve ser inferior a 2 segundos.
B
A
C
Figura 5.2 Simbologia: A- Relé de tempo com 1 comutador; B-Relé de tempo com 2 comutador
Funcionamento Relé de Tempo com Retardo na Desenergização
C-
Relé de tempo com Impulso na Energização: após a energização do relé, os contatos de
saída são comutados instantaneamente e permanecem acionados durante o período de tempo
ajustado no dial.
B
A
C
Figura 5.3 Simbologia: A-Relé de tempo com 1 comutador; B-Relé de tempo com 2 comutador
C-Funcionamento Relé de Tempo com Impulso na Energização
45
Relés de Tempo para Chaves de Partida Y – D: após a energização do relé os contatos de
saída do primeiro comutador são comutados instantaneamente (energiza os contatores para ligação
estrela), permanecendo assim acionados durante o período de tempo ajustado no dial (tempo de
partida do motor em estrela – tensão reduzida).
Após a contagem de tempo é acionado o segundo comutador (energiza os contatores para
ligação triangulo), sendo que há um intervalo de tempo, chamado de tempo morto (ente 30 a 100 ms
– dependendo do fabricante), entre o retorno ao estado original do primeiro comutador e o
acionamento do contato do segundo comutador, para que haja uma garantia da abertura da ligação
estrela, permanecendo assim até que a alimentação seja interrompida.
A
B
Figura 5.4 Simbologia: A - Relé de tempo para Chave de Partida Y – D;
B-Funcionamento Relé de Tempo para Chave de Partida Y – D
Figura 5.5 Relés de Temporização
46
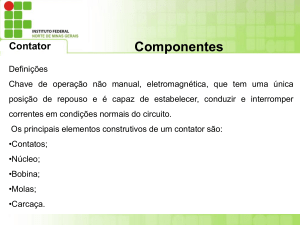
VI - CONTATORES
O contator é um dispositivo de manobra de operação por energização de uma bobina cujo
núcleo tem uma parte móvel solidária aos contatos móveis. O contator opera sob correntes de carga e
de sobrecarga, mas não de curto circuito. É denominado de potência quando comando circuitos de
força e auxiliar quando é usado para multiplicar o número de contatos de um dispositivo de comando.
A energização da bobina é feita por uma botoeira do tipo pulsador; o desligamento pode ser realizado
também por um contator NF do relé de proteção contra sobre cargas quando em série com a bobina
do contator. A proteção contra curto-circuitos é proporcionada por fusíveis ou disjuntores. A vista
explodida da figura a seguir mostra o princípio construtivo e as partes de um contator típico.
Figura 6.1 Contator Eletromagnético
Figura 6.2 Simbologia Contator Eletromagnético com 2 Contatos Auxiliares sendo 1NA + 1NF
Contatos de Força 1-2; 3-4; 5-6; Primeiro Auxiliar 13-14 (NA); Segundo Auxiliar 21-22 (NF)
47
Figura 6.3 Análise dos Contatos de um Contator
A vida elétrica dos contatos pode ser prevista por cálculo e acompanhada por inspeção visual.
Embora os contatos aparentemente estejam com mau aspecto como na que indica contato normal de
uso, eles estão ainda em condição de operação normal; não se deve aplainar os contatos com lima ou
outras ferramentas. Somente quando em algum ponto acaba o material do contato, como indicado na
do contato desgastado é que os contatos devem ser trocados. O estado do contato pode ser
analisado sem inspeção visual através da indicação de vida útil restante.
6.1 Funcionamento do Contator
Acompanhando a figura do contator eletromagnético, quando a bobina (4) é energizada o
campo magnético atrai a parte móvel do núcleo (5) ao qual estão solidários os contatos móveis que
vão se encontrar com os contatos fixos (3) estabelecendo o fechamento do circuito e tensionando a
mola para desligamento.
Quando há uma sobrecarga, o relé correspondente opera, abrindo o contato NF que está em
série com a bobina, desenergizando-a e abrindo o circuito por ação da mola. O religamento pode ser
automático ou por uma botoeira, de acordo com as condições do circuito. O contator tem ainda
contatos auxiliares NA e NF (6) em quantidade variável com as necessidades do circuito, para
comandar outros dispositivos, ou para sinalizar sua posição (ligado-desligado) ou ainda para
intertravamentos. Os contatos precisam ser feitos de material bom condutor e resistente às
48
temperaturas dos arcos que se formam ao estabelecer ou interromper em corrente. Uma das
principais características dos contatores é o elevado número de operações que depende do tipo da
carga que ele opera, pois a duração do arco depende; para uma tensão e uma dada corrente:
• Da velocidade de separação dos contatos;
• Da velocidade de fechamento do contator,
• Do fator de potência da carga
Que vão determinar o tempo de extinção do arco e, em conseqüência, o esforço térmico
sobre os contatos.
6.2 Especificação
Para a especificação correta de um contator são necessárias informações sobre o circuito,
sobre a carga, o regime de manobra da carga, a categoria de emprego, tipo de coordenação (1 ou 2)
com o fusível ou disjuntor, a família de relés de sobrecarga aplicável.
6.3 Comandos dos Contadores
6.3.1 Comando convencional
É feito energização e desenergização direta e indireta da bobina magnética com uma faixa de
operação normal de 0,8 a 1,1 vezes a tensão nominal.
6.3.2 Comando através da eletrônica
A bobina magnética é energizada e desenergizada com uma potência necessária para
ligar/desligar e funcionamento contínuo através de uma eletrônica de comando, onde:
• A faixa de operação é 0,7 a 1,25 vezes a tensão de comando.
• Atuação independente de curtas quedas de tensão.
• Mesmo que a tensão caia a zero com duração de 25ms (+- 1,5 ciclos) não ocorrerão
desligamento indesejados.
• Operação normal em redes fracas e instáveis.
• Baixo consumo de ligação e retenção.
49
• Imunidade a interferências.
Através do comando eletrônico permite-se a alimentação diretamente de uma saída PLC 24
VCC (≤ 30mA) comando convencional com a tensão de comando ligada através de contato, assim
como, ter a indicação da vida útil restante dos contatos. O Comando eletrônico pode permitir até a
comunicação com interface AS integrada.
6.4 Supressão de Surtos de Tensão
A desenergização de carga indutivas como bobina do contator provoca surto de tensão que
podem ser atenuadas por módulos RC, varistores, diodos ou combinação de diodos.
6.5 Os Contatos Auxiliares
Usados para sinalização, comando ou intertravamentos os contatos auxiliares devem possuir
elevada confiabilidade de contato, permitindo operar comandos eletrônicos com correntes ≥ 1mA e
tensão de 17V. Contatores para elevadas correntes podem ter em sua construção a operação dos
contatos em uma câmara de vácuo, o que permite obter-se especialmente, uma maior vida útil dos
contatos do que os contatores com contatos de operação convencional.
50
6.6 Categorias de Emprego dos Contatores
(conforme IEC 60947-1)
6.6.1 Corrente alternada
AC - 1 Cargas não indutivas ou de baixa indutividade – Resistências;
AC - 2 Motores com rotor bobinado (com anéis); Partida com desligamento durante a partida e
em regime nominal;
AC - 3 Motores com rotor em curto-circuito (gaiola); Partida com desligamento em regime
nominal;
AC - 4 Motores com rotor em curto-circuito (gaiola); Partida com desligamento durante a
partida, partida com inversão de rotação, manobras intermitentes;
AC - 5a Lâmpadas de descarga em gás (fluorescentes, vapor de mercúrio ou sódio);
AC - 5b Lâmpadas incandescentes;
AC - 6a Transformadores;
AC - 6b Banco de capacitores;
AC - 7a Cargas de aparelhos residenciais ou similares de baixa indutividade;
AC - 7b Motores de aparelhos residenciais;
AC - 8 Motores-compressores para refrigeração com proteção de sobrecarga;
6.6.2 Corrente Contínua
DC - 1 Cargas não indutivas ou de baixa indutividade – Resistências;
DC - 3 Motores de derivação (shunt); Partidas normais, partidas com inversão de rotação,
manobras intermitentes, frenagem;
DC - 5 Motores série; Partidas normais, partidas com inversão de rotação, manobras
intermitentes, frenagem;
DC - 6 Lâmpadas incandescentes; Contatores auxiliares / Contatos auxiliares;
51
6.6.3 Contatos auxiliares
6.6.3.1 Corrente alternada
AC - 12 Cargas resistivas e eletrônicas;
AC - 13 Cargas eletrônicas com transformador de isolação;
AC - 14 Cargas eletromagnéticas ≤ 72 VA;
AC - 15 Cargas eletromagnéticas > 72 VA;
6.6.3.2 Corrente contínua
DC - 12 Cargas resistivas e eletrônicas;
DC - 13 Cargas eletromagnéticas;
DC - 14 Cargas eletromagnéticas com resistências de limitação.
6.7 Exemplos do uso das categorias de emprego
As categorias de emprego foram criadas para facilitar a escolha pelo usuário do contator mais
adequado para sua instalação tanto do ponto de vista econômico como o técnico. Foram levados em
conta os fatores que levam a uma maior duração do arco, as correntes associadas ao ligamento e
desligamento das cargas, o de potência do circuito e a freqüência com que são executadas as
operações mais críticas. Assim, podem exemplificar com alguns casos:
6.7.1 AC- 1 Cargas resistivas
Esta categoria se destina à operação de cargas resistivas ou de baixa indutividade ou não
indutivas. Nesses casos a corrente se anula praticamente ao mesmo tempo em que a tensão e a
extinção do arco fica mais fácil.
52
6.7.2 AC- 2 Motores com rotor bobinado (com anéis).
Na aplicação destes motores freqüentemente eles são desligados durante a partida e,
portanto com uma corrente muito alta. Nesta função, além de fechar com uma corrente alta, o contator
é chamado a interromper esta elevada corrente como uma operação normal. Naturalmente, depois de
entrar em regime o motor vai ser desligado sob a corrente nominal da carga.
6.7.3 AC- 3 Motores com rotor em curto-circuito (gaiola)
Os contatores para esta categoria proporcionam o ligamento com a corrente de partida, mas o
desligamento se dá depois de completada a partida com a corrente nominal de carga. É, pois uma
operação das mais comuns. O fato de que eventualmente haja desligamento durante a partida não
leva à necessidade de usar contatores mais robustos, o que conta é a operação normal.
6.7.4 AC- 4 Motores com rotor em curto-circuito (gaiola).
Nesta categoria os motores são desligados habitualmente durante a partida (correntes 4,5/ ou
6 vezes a
nominal). Além disso, também freqüentemente é feita inversão da rotação na partida e há manobras
intermitentes. O que distingue está categoria da anterior é a freqüência com que são realizados os
desligamentos e ligamentos com correntes várias vezes maior que a nominal da carga.
6.7.5 AC- 6a Transformadores
Os transformadores têm corrente de ligamento, quando estão sem carga, de ordem de 11
vezes a corrente nominal, o que define uma especificação dedicada do contator.
53
6.7.6 AC- 6b Bancos de capacitores
Neste caso temos várias situações de difícil operação: ligamento do banco com correntes 20
a 30 vezes nominal; desligamento do banco com a corrente reanulando quando a tensão passa pelo
valor crista o que aumenta a duração do arco e dá origem reignições (restrikes). Se os bancos tiverem
a função de compensar quedas de tensão a operação pode ser várias vezes por dia, ou mesmo por
hora.
Quando houver bancos em paralelo, as correntes dos bancos já energizados concorrem para
aumentar a corrente de ligamento que atingirá muitas dezenas ou centenas de vezes a corrente
nominal de um banco. Os contatores apropriados são equipados com resistores de pré-inserção (que
serão ligados antes dos contatos principais se fecharem) e entre os bancos deverão ser instalados
indutores de alguns µH ou os bancos serão espaçados de modo que os condutores proporcionarão a
indutância necessária.
6.8 Durabilidade Mecânica e Elétrica dos contatores
A durabilidade mecânica de um contator é o número mínimo de operações que o contator
pode efetuar sem corrente de carga. É um valor da ordem de 10 a 15 milhões de operação e é um
dado indicado no catálogo do fabricante.
A durabilidade elétrica de um contator é o número de operações que o contator pode
executar, função da freqüência de manobras e da categoria de emprego.
54
O nomograma abaixo permite estimar do tempo da durabilidade elétrica do contator.
Figura 6.4 Nomograma de Estimação do Tempo da Durabilidade Elétrica do Contator
Nesse gráfico entramos com a durabilidade elétrica desejada em milhões de manobras, no
exemplo 1 milhão de manobras, (1º valor de referência), com o número de manobras por hora:
200/hora (2º valor de referência) e a duração diária do serviço: 8 horas e obtemos estimativa da
durabilidade elétrica do contator: igual a 2,5 anos. A seqüência para utilização do nomograma é a
seguinte: Unem-se os pontos correspondentes ao 1º valor de referência (1 milhão) e ao segundo valor
de referência (200), obtendo-se uma reta que cruza a linha de referência. A partir desse ponto de
cruzamento, traça-se uma linha horizontal até encontrar a linha correspondente ao número diário de
horas de serviço (4h, 8h, 12h, 16h, 20h ou 24h) e determina-se a estimativa de durabilidade elétrica
do contator (no exemplo 2,5 anos).
Esse nomograma é fornecido pelo fabricante. O fabricante oferece ainda, em catálogo,
gráficos de estimativa de durabilidade elétrica do contator em número de manobras. Nesses gráficos,
são mostrados a durabilidade elétrica do contator em base a corrente de desligamento e a categoria
de emprego.
55
Entrando nesse gráfico com a corrente de desligamento no eixo horizontal, obtemos no eixo
vertical para cada um dos contatores a durabilidade elétrica em número de manobras para 230 e 500
V.
Figura 6.5 Gráfico de Estimativa de Durabilidade Elétrica do Contator em Número de Manobras
Figura 6.6 Contatores de Força para Manobra de Cargas, normalmente Motores
56
Figura 6.7 Bloco de Contatos Auxiliares para Montagem Frontal por Encaixe no Contator Principal
Figura 6.8 Contator Auxiliar para Comando – Somente Contatos Auxiliar de Comando NA e/ou NF
Figura 6.9 Contatores Montados numa Chave de Partida Y – D e numa Chave de Partida Reversora
57
VII - TRANSFORMADORES DE COMANDO
Os transformadores de comando tem como objetivo principal compatibilizar a tensão da rede
com a tensão de comando. Normalmente é usado para energização dos circuitos de comando, o valor
de tensão de 220 Vac para painéis de uso e operação exclusivo de pessoal técnico especializado,
como o setor de utilidades, onde se tem as sala de máquinas com compressores de refrigeração e de
ar comprimido, aquecedores de fluído térmico, caldeiras para geração de vapor, geradores elétricos,
reservatórios,entre outros. Para painéis que a intervenção no processo, ou seja, o acionamento das
máquinas de produção, será feita por operadores de produção – pessoal com qualificação voltada
para o setor produtivo e não o de técnica eletro - eletrônica e/ou mecânica – recomenda-se o uso de
valores de tensão em 48Vac, 24 ou 48Vdc, por se tratarem segundo a norma NBR 5410, valores de
tensão extra baixa, não ocasionando risco de choque elétrico. Utilizar esses valores de tensão extra
baixa para energização dos circuitos de comando, muitas vezes se faz necessário por haver um
ambiente com muita umidade, o que poderia provocar uma contaminação de água condensada em
um dispositivo , podendo provocar um acidente por choque elétrico acidental por contato indireto. O
uso do transformador de comando possibilita que o circuito de comando seja ligado entre fase e terra,
evitando o possível desequilíbrio do ponto neutro da ligação estrela do secundário do transformador
principal da rede, o que pode uma variação de tensão no circuito de comando.
O transformador de comando ainda isola (separa) eletricamente o circuito de comando
do circuito da rede principal. Com esta prática o circuito de comando estará isento de qualquer
anomalia como curto – circuito ou sobrecargas do circuito de força, oferecendo uma isolação
galvânica e inclusive efeito de supressor em transitórios não lineares da instalação.
São usuais os transformadores com tensões de primário e secundário tais como:
Primário
Secundário
220 / 380 / 440 / 480Vac
24 / 110 / 220Vac
Figura 7.1 Representação das Bobinas de um Transformador de Comando
58
Quando necessita – se para alimentação dos dispositivos de comando, valores de tensão em
tensão contínua, usa – se normalmente um transformador de comando tendo no secundário apenas
dois valores de tensão disponíveis, conectado com uma ponte retificadora de onda completa
associada a um capacitor para diminuir o riplle, ou seja, melhorar a forma de onda, ou, uma fonte de
alimentação em Vdc.
Figura 7.2 Transformador de Comando
59
VIII - CHAVES DE PARTIDA
Existem 3 métodos de partir um motor de indução.
1 – Partida direta: partida no qual o motor recebe o valor de tensão nominal das bobinas
desde o instante que é energizado, por isso, também chamado de partida a plena tensão. Esse
método de partida produz um elevado torque na partida, alto consumo de corrente na partida (entre 2
a 12 vezes a corrente nominal In), pode provocar queda de tensão momentânea no ato de sua
energização, ocasiona golpes mecânicos. Método mais simples de acionar um motor, sendo aplicado
a motores de pequena potência.
2 - Partida com tensão indireta: partida no qual o motor é acionado com um valor de tensão
sobre suas bobinas menor do que o valor nominal, ocasionando assim uma queda na corrente
consumida no motor durante a partida. Após o motor atingir cerca de 90% da sua rotação nominal o
motor é energizado com o valor nominal da tensão de bobina do mesmo. Dentre as formas de se
conseguir esse método de partida há o método de partida estrela – triangulo (o motor parte ligado em
estrela e após atingir 90% da rotação nominal é desfeito a ligação estrela e feito a ligação triangulo) e
o método com chave autocompensadora (o motor na partida é alimentado a partir da derivação de um
autotransformador e após atingir cerca de 90% da rotação nominal o mesmo é conectado diretamente
na rede de alimentação). Métodos usados para reduzir o alto consumo de corrente elétrica consumida
pelo motor na partida, além de ser exigido por norma. Há também o método com resistores e
indutores em série com as bobinas do motor, indicado para motores de grande potência e,
normalmente, motores alimentado em média ou alta tensão.
3 – Partida com chaves eletrônicas: partida de motores no qual se usa uma chave de partida
eletrônica, chamada soft-starter, que com o uso dessa chave há um controle continuo no valor de
tensão eficaz aplicada ao motor, desde a partida até o regime nominal, não gerando altas correntes
de consumo pelo motor na partida e golpes mecânicos, no qual ocorre com os outros métodos de
partida.
60
8.1 - Função de um Dispositivo de Partida
A finalidade básica de um dispositivo de partida é de garantir o seguro acionamento de um
motor, visando a proteção do mesmo e da rede de alimentação contra curtos-circuitos, quedas de
tensão, sobrecargas, distúrbios e ruídos devido a dispositivos de acionamento eletrônico ou mau
aterramento; proteção das cargas acionadas (máquinas e equipamentos); e do seguro acionamento
de partida e parada do motor de modo a proteger os usuários (pessoas).
Figura 8.1 Composição mínima para uma chave de partida
8.2 - Composição de um Dispositivo de Partida
As funções que uma chave de partida deve assegurar segundo a norma IEC 60947-1são:
8.2.1 Seccionamento
A seccionadora é um dispositivo que deve isolar eletricamente os circuitos de potência e
comando da alimentação geral. Dependendo do tipo da seccionadora ela é capaz de fechar e
interromper o circuito com ou sem carga e pode suportar um curto-circuito fechado. São usados,
normalmente para isolar uma máquina ou equipamento por inteiro da rede de alimentação. Usa-se
61
para tal função seccionadoras de contatos tipo faca ou pressão (apenas isola eletricamente os
circuitos), chave-fusível (secciona e protege o circuito contra curto-circuitos) ou disjuntores
(seccionam, protegem contra curto-circuito e sobrecargas). O seccionador deve suportar a corrente
total do equipamento.
8.2.2 Proteção contra curtos-circuitos
Um curto-circuito se manifesta por um aumento excessivo da corrente elétrica, que alcança
em poucos milisegundos valores iguais a até centenas de vezes a corrente nominal de emprego. Para
evitar que um curto-circuito danifique de forma muitas vezes irreparáveis às pessoas, bens e
patrimônios, deve-se utilizar dispositivos que detectem e interrompam o mais rápido possível
correntes anormais superiores a 10 x In. Aqui se devem considerar os aspectos de proteção das
pessoas e proteção dos bens e patrimônios. Usa-se para finalidade de proteção das pessoas o
disjuntor diferencial quando á ocorrência de falhas à terra, podendo ocasionar o choque elétrico
devido ao contato direto ou indireto quando uma pessoa que entra em contato com um condutor
(contato direto) ou uma parte condutora que normalmente não esta energizada, mas que se torna
energizada acidentalmente (quando a uma falha de isolação por exemplo). Para essa finalidade de
proteção são usados fusíveis, disjuntores limitadores e disjuntores termomagnéticos.
8.2.3 Proteção contra sobrecargas
Todas as cargas estão sujeitas a incidentes de origem elétrica e mecânica como sobretensão,
queda de tensão, desequilíbrio ou falta de fase, rotor bloqueado, sobrecargas mecânicas, etc. Todos
incidentes provocam um aumento de corrente absorvida pelo motor e um aquecimento perigoso nos
enrolamentos do motor (efeito térmico). Para evitar estes incidentes é obrigatório ter uma proteção
contra sobrecargas, para detectar aumentos de corrente, de sobre e subtensão e interromper a
partida ou funcionamento antes que o aquecimento do motor e dos condutores provoque a
deterioração dos isolantes. A sobrecarga é o defeito mais freqüente nas máquinas. Segundo o nível
de proteção desejado e a categoria de emprego do receptor, a proteção contra sobrecarga pode ser
realizada com relés térmicos bimetálicos, relés para sondas e termistores, relés eletrônicos
multifunção e disjuntor-motor.
62
8.2.4 Comutação
A comutação consiste em estabelecer e interromper a alimentação dos receptores, quando
requer um comando semi ou automático e uma grande cadência de manobras. O uso industrial para
essa finalidade são do tipo eletromagnéticos como os contatores , eletrônicos como relés em estado
sólido (SSR – solid state relay), disjuntor-motor, partidas combinadas, e as do tipo eletrônicos como
partidas progressivas (soft-starter e inversor de freqüência).
8.3 Definições das Coordenadas de Proteção - IEC
60 947-4
A montagem de uma chave de partida, deve atender a um dos tipos de coordenação de
proteção aplicadas aos dispositivos de seccionamento, proteção e comutação, segundo os tipos
abaixo.
8.3.1 Coordenação tipo 1
Sem riscos para as pessoas e instalações, ou seja, desligamento seguro da corrente de curtocircuito. O conjunto estará incapaz de continuar funcionando após o desligamento, permitindo danos
ao contator e o relé de sobrecarga ou outro dispositivo.
8.3.2 Coordenação tipo 2
Sem riscos para as pessoas e instalações, ou seja, desligamento seguro da corrente de curtocircuito. Não podendo haver danos ao relé de sobrecarga ou outro dispositivo, com exceção de leve
fundição dos contatos e estes permitam fácil separação sem deformação significativa.
63
8.4 - Glossário
Termos técnicos utilizados nessa apostila, segundo as normas vigentes.
Seccionadoras: dispositivo de manobra (mecânico) que assegura, na posição aberta, uma
distância de isolamento que satisfaz requisitos de segurança especificados.
Nota: um seccionador deve ser capaz de fechar ou abrir um circuito, ou quando a corrente
estabelecida ou interrompida é desprezível, ou quando não se verifica uma variação significativa na
tensão entre terminais de cada um dos seus pólos. Um seccionador deve ser capaz também de
conduzir correntes em condições normais de circuito, e também de conduzir por tempo especificado,
as correntes em condições anormais do circuito, tais como as de curto-circuito.
Interruptor: chave seca de baixa tensão, de construção e características elétricas adequadas
à manobra de circuitos de iluminação em instalações prediais, de aparelhos eletrodomésticos e
luminárias, e aplicações equivalentes.
Contator: dispositivo de manobra (mecânico) de operação não manual, que tem uma única
posição de repouso e é capaz de estabelecer (ligar), conduzir e interromper correntes em condições
normais do circuito, inclusive sobrecargas de funcionamento previstas.
Disjuntor: dispositivo de manobra (mecânico) e de proteção, capaz de estabelecer (ligar),
conduzir e interromper correntes em condições normais do circuito, assim como estabelecer, conduzir
por tempo especificado e interromper correntes em condições anormais especificadas do circuito, tais
como as de curto-circuito.
Fusível encapsulado: fusível cujo elemento fusível é completamente encerrado num
invólucro fechado, o qual é capaz de impedir a formação de arco externo e a emissão de gases,
chama ou partículas metálicas para o exterior quando da fusão do elemento fusível, dentro dos limites
de sua característica nominal.
Relé
(elétrico):
dispositivo
elétrico
destinado
a
produzir
modificações
súbitas
e
predeterminado em um ou mais circuitos elétricos de saída, quando certas condições são satisfeitas
no circuito de entrada que controlam o dispositivo.
Observação: O relé seja de que tipo for, não interrompe o circuito principal, mas sim faz atuar
o dispositivo de manobra desse circuito principal. Assim, por exemplo, existem relés que atuam em
sobrecorrente de sobrecarga ou de curto-circuito, ou de relés que atuam perante uma variação
64
inadmissível de tensão. Por outro lado, os reles de sobrecorrente perante sobrecarga (ou
simplesmente relés de sobrecarga), por razões construtivas, podem ser térmicos (quando atuam em
função do efeito joule da corrente sobre sensores bimetálicos), ou senão eletrônicos, que atuam em
função de sobrecarga e que podem adicionalmente ter outras funções, como supervisão dos
termistores (que são componentes semicondutores), ou da corrente de fuga.
Quanto às grandezas elétricas mais utilizadas, destacamos:
Corrente nominal: corrente cujo valor é especificado pelo fabricante do dispositivo.
Nota do autor: Essa corrente é obtida quando da realização dos ensaios normalizados,
conforme comentário anterior.
Corrente de curto-circuito: sobrecorrente que resulta de uma falha, de impedância
insignificante entre condutores energizados que apresentam uma diferença de potencial em
funcionamento normal.
Corrente de partida: valor eficaz da corrente absorvida pelo motor durante a partida,
determinado por meio das características corrente-velocidade.
Sobrecorrente: corrente cujo valor excede o valor nominal.
Sobrecarga: à parte da carga existente que excede a plena carga.
Nota: Esse termo não deve ser utilizado como sinônimo de sobrecorrente.
Capacidade de interrupção: um valor de corrente de interrupção que o dispositivo é capaz
de interromper, sob uma tensão dada e em condições prescritas de emprego e funcionamento, dadas
em normas individuais. Observação: A capacidade de interrupção era antigamente chamada de
capacidade de ruptura, termo que não deve mais ser usado. O valor da capacidade de interrupção é
de particular importância na indicação das características de disjuntores, que são, por definição,
dispositivos capazes de interromper correntes de curto-circuito, o que os demais dispositivos de
manobra não fazem.
Resistência de contato: resistência elétrica entre duas superfícies de contato, unida em
condições especificada. Observação: esse valor é de particular interesse entre peças de contato,
onde se destaca o uso de metais de baixa resistência de contato, que são normalmente produzidos
por metais de baixo índice de oxidação, ou senão ainda, quando duas peças condutoras são
colocadas em contato físico, passando a corrente elétrica de uma superfície a outra. É por exemplo, o
que acontece entre o encaixe de fusíveis na base e a peça externa de contato do fusível, que não
pode ser fabricada com materiais que possam apresentar elevada resistência de contato.
65
8.5 - Chave de Partida Direta Simples
Segundo o regulamento da maioria das concessionárias brasileiras de energia elétrica,
baseadas na NBR 5410, um motor elétrico somente poderá partir diretamente, ou seja, a plena tensão
quando a potência do motor for igual ou inferior a 5cv sendo o mesmo alimentado por uma rede
secundária de alimentação em baixa tensão de 220/127 Vac ou, quando a potência do motor for igual
ou inferior a 7,5cv sendo o mesmo alimentado por uma rede secundária de alimentação em baixa
tensão de 380/220 Vac, ou ainda, 9%, referida em cavalo vapor, da potência, em KVA, do
transformador da subestação rebaixadora.
A chave de partida direta, ou, chave de partida a plena tensão, é a forma mais simples de
acionar um motor elétrico. Como o próprio nome já diz, o motor é acionado recebendo desde a
partida, momento em que o motor recebe tensão a partir do circuito alimentador, a tensão nominal
para o qual foi projetado, ou seja, se a bobina do motor foi projetada para receber 380 Vac, o mesmo
receberá este valor de tensão desde o instante da partida até o regime nominal de funcionamento e
assim permanecerá até ser desenergizado. Por haver um alto consumo de corrente elétrica na partida
por um motor elétrico (devido ao escorregamento e ao valor da tensão aplicado na partida) acionado
pela chave de partida direta, na ordem de 2 a 12 x In, há também nesse momento de partida uma
momentânea queda de tensão. Essa situação por vezes pode ser inconveniente pois, num circuito
alimentador normalmente há vários consumidores. Entendendo como consumidor outras máquinas ou
equipamentos acionados por dispositivos elétricos em um mesmo estabelecimento, ou de um outro
estabelecimento vizinho alimentando pela mesma subestação ou QGBT. Essa queda de tensão
provocada pela partida direta do motor pode vir, em alguns casos, fazer um falso desligamento em
algum dispositivo de proteção ou vir a provocar um mal funcionamento de um equipamento
consumidor, de maneira as vezes até definitivo se for o caso de equipamentos eletroeletrônicos. Um
outro aspecto que deve ser visto é o fato do motor elétrico gerar um alto torque de aceleração na
partida direta. Isto provoca os chamado solavancos, ou seja, golpes mecânicos na máquina acionada.
Em termos práticos tem-se a redução da vida útil dos componentes do equipamento, principalmente
em selos mecânicos, retentores, acoplamentos, mancais e rolamentos, fixadores, fadiga mecânica
dos materiais de transmissão de força, e, nos casos de movimentação e transporte de fluídos, ocorre
também golpes provocado pela rápida aceleração do fluído, o golpe de aríete, que pode vir a provocar
danos em válvulas, vedações de flanges, registros, danos em alguns tipos de filtro, danos em
instrumentos de medição e verificação como manômetros, fadiga em pontos soldados da tubulação,
entre outros.
O gráfico abaixo demonstra o comportamento da corrente elétrica absorvida por um motor
elétrico em função do escorregamento, assim como a curva do torque produzida pelo motor partindo a
plena tensão.
66
Figura 8.2 Comportamento da corrente e conjugado de um motor partindo a plena tensão
A chave de partida direta é aplicada em máquinas com qualquer tipo de carga; máquinas que
permitem normalmente suportar o conjugado (torque) de aceleração; fonte com disponibilidade de
potência para alimentação; confiabilidade de serviço pela composição e comando simples.
67
Multifilar
Unifilar
Figura 8.3 Esquema de Força da Chave de Partida Direta no Modo Multifilar e no Modo Unifilar
Sendo:
Q1 + k1: Q1 = disjuntor – motor, com função de proteção contra curto-circuito e sobrecarga,
com contato auxiliar NF (95-96) para comando; k1 = contator de força com função de estabelecer e
interromper a alimentação do motor.
Q1 + k1 + FT1: Q1 = disjuntor – motor, com função de proteção contra curto-circuito e
sobrecarga, sem contato auxiliar NF (95-96) para comando; k1 = contator de força com função de
estabelecer e interromper a alimentação do motor; FT1 = relé de sobrecarga bimetálico com função
de proteção contra sobrecargas, através da inserção de seu contato auxiliar para comando NF (95-96)
no esquema de comando.
68
Figura 8.4 Esquema de comando da chave de partida direta respectivamente aos esquemas de força anterior
Sendo:
L1 e L2: alimentação do comando conforme tensão de bobina do contator. Normalmente a
bobina do contator é fabricada para: 380, 220 ou 110 Vac, ou 48, 24 ou 12 Vdc; por isso a
necessidade ora do uso do F22.
F21 e F22: fusíveis, ou disjuntor mono ou bipolar, para proteção do circuito do comando,
sendo F22 de uso obrigatório quando o circuito de comando alimentado entre fases, ou entre positivo
e negativo.
NF de Q1 ou NF de FT1 (95-96): contato auxiliar dos dispositivos de proteção com função de
proteção do motor indiretamente com a abertura do circuito alimentador da bobina do contator.
SE + S0 + S1: SE = botão tipo soco para emergência, com trava; S0 = botão pulsador com
função de DESLIGA; S1 = botão pulsador com função de LIGA.
69
8.6 - Chave de Partida Direta Simples com Reversão
A chave de partida direta com reversão possui características semelhantes a chave de partida
direta. Os contatores usados na montagem dessa chave possuem a categoria de emprego diferente
dos utilizados na chave de partida direta, conforme as categorias de emprego mostradas nos anexos.
Quando a reversão é feita após o motor parar por completo, as curvas de corrente e torque em função
da rotação ou escorregamento são idênticas ao gráfico mostrado da chave de partida direta. Porém,
quando a comutação para reversão do motor ocorre com o motor em funcionamento, o tempo de
corrente de rotor bloqueado (Ip) é maior. Este tempo corresponde ao tempo em que o motor custa a
reduzir a rotação do valor nominal a zero RPM e inverter o sentido de rotação.
A inversão do sentido de rotação se dá através da inversão da seqüência de fase aplicada ao
motor. Para inverter o sentido de rotação se faz necessário alterar somente a posição de duas fases
que alimentam o motor. A inversão da seqüência de fase é feita através das conexões elétricas feita
nos pólos de dois contatores como mostrado a seguir nos esquemas de força e comando.
Quando é feita a reversão do sentido de rotação do motor, estando o motor em
funcionamento, deve-se atentar que ocorre um momento de esforço mecânico torçor no sistema de
acoplamento da máquina com o motor, principalmente, nos eixos das máquina motriz e motora. É
característico as máquinas e equipamentos que necessitem inverter o sentido de rotação, que a troca
de peças sobressalentes (rolamentos, selo mecânico, retentores, buchas, etc) sejam feitas num
intervalo de tempo mais curto em relação as máquinas
simples.
70
acionadas por chaves de partida direta
Multifilar
Unifilar
Figura 8.5 Esquema de força da chave de partida direta com reversão no modo multifilar e no modo unifilar
Sendo:
Q1 + k1 + FT1: Q1 = disjuntor – motor, com função de proteção contra curto-circuito e
sobrecarga, sem contato auxiliar NF (95-96) para comando; k1 = contator de força com função de
estabelecer e interromper a alimentação do motor com uma determinada seqüência de fase; K2 =
contator de força com função de estabelecer e interromper a alimentação do motor com seqüência de
fase diferente de K1; FT1 = relé de sobrecarga bimetálico com função de proteção contra
sobrecargas, através da inserção de seu contato auxiliar para comando NF (95-96) no esquema de
comando.
71
Figura 8.6 Esquema de comando da chave de partida direta com reversão
Sendo:
L1 e L2: alimentação do comando conforme tensão de bobina do contator. Normalmente a
bobina do contator é fabricada para: 380, 220 ou 110 Vac, ou 48, 24 ou 12 Vdc; por isso a
necessidade ora do uso do F22.
F21 e F22: fusíveis, ou disjuntor mono ou bipolar, para proteção do circuito do comando,
sendo F22 de uso obrigatório quando o circuito de comando alimentado entre fases, ou entre positivo
e negativo.
NF de Q1 ou NF de FT1 (95-96): contato auxiliar dos dispositivos de proteção com função de
proteção do motor indiretamente com a abertura do circuito alimentador da bobina do contator.
SE + S0 + S1 + S2: SE = botão tipo soco para emergência, com trava; S0 = botão pulsador
com função de DESLIGA; S1 = botão pulsador com função de LIGA num sentido de rotação e S2 no
outro sentido.
72
8.7 Chave de Partida Indireta Estrela - Triângulo (Y-D)
Segundo o regulamento da maioria das concessionárias brasileiras de energia elétrica,
baseadas na NBR 5410, um motor elétrico somente poderá partir diretamente, ou seja, a plena tensão
quando a potência do motor for igual ou inferior a 5cv sendo o mesmo alimentado por uma rede
secundária de alimentação em baixa tensão de 220/127 Vac ou, quando a potência do motor for igual
ou inferior a 7,5cv sendo o mesmo alimentado por uma rede secundária de alimentação em baixa
tensão de 380/220 Vac, ou ainda, 9%, referida em cavalo vapor, da potência, em KVA, do
transformador da subestação rebaixadora. Quando for observado que a partida do motor não esta de
acordo com o referido acima, deve-se ser utilizado um método de partida que reduza a corrente
absorvida pelo motor na partida, afim de, não prejudicar o fornecimento de energia elétrica, mesmo
que momentaneamente, aos demais consumidores da rede de alimentação. Entende-se como rede
não apenas consumidores vizinhos, mas como também, as outras cargas de uma mesma rede
terminal de alimentação.
Para que possa ser usada a chave de partida estrela-triangulo o motor deve possuir os
terminais início e fim das bobinas acessíveis. O motor na partida é ligado em estrela e assim ligado
deve receber o valor de tensão igual a Un/√3. Quando o motor atingir cerca de 90% da rotação
nominal deverá ser desfeito a ligação estrela realizar a ligação triangulo. Com o motor ligado em
triangulo, ou seja, cada bobina ligada entre fases, o motor devera receber sobre as bobinas o valor de
tensão nominal para o qual foi projetado. Como se vê abaixo, com esse método de partida há uma
significativa redução na corrente consumida pelo motor na partida, diminuindo a possibilidade de
provocar quedas de tensão momentâneas na rede de alimentação.
Quando o motor é comutado de estrela para triangulo ocorre um aumento na tensão recebida
pelas bobinas do motor, conseqüentemente, um pico de corrente consumida pelo mesmo. Isso ocorre
devido ao intervalo de tempo em que o motor não recebe tensão, que é o tempo entre desfazer a
ligação estrela e fazer a ligação triangulo, ou seja, o motor estava recebendo um valor de tensão
menor durante a partida, desfeito a conexão estrela o motor não recebe alimentação, e quando feito a
ligação triangulo o motor é alimentado à plena tensão, porém, já com rotação próxima da nominal. A
corrente na partida fica reduzida a 1/3 da corrente de partida a plena tensão, porém, o conjugado
disponibilizado no eixo do motor também fica reduzido a 1/3 do conjugado de partida a plena tensão.
Caso com o uso da chave estrela-triângulo o motor não consiga movimentar a carga, ou, movimentar
com severas dificuldades na partida, deve-se optar por uma chave que aumente a tensão aplicada na
partida, conseqüentemente e proporcionalmente, o conjugado de partida, mas que não aumente de
forma significativa a corrente de partida. Deve-se optar pela chave de partida autocompensadora ou
por uma chave de partida sof – starter.
Somente é possível utilizar a chave de partida estrela – triângulo quando a tensão de bobina
for igual a tensão de linha da rede de alimentação.
73
O método de partida com tensão reduzida, ou, tensão indireta, do tipo estrela – triangulo é
aplicado em motores que acionam cargas ou máquinas que partem em vazio ou com conjugado
resistente baixo; esse método alivia o conjugado ( torque ) de aceleração em base a tensão inicial (
reduzida ), e conseqüente redução da disponibilidade de potência para alimentação do motor. Há,
porém, no momento da comutação da ligação do motor de estrela para triângulo, além de um pico de
corrente, uma aceleração brusca, devido ao aumento do torque do motor quando alimentado a plena
tensão, pois o torque é diretamente proporcional ao quadrado da tensão. Isso no motor e na máquina
acionada significa um golpe, ou, solavanco mecânico, o que diminui a vida útil do motor e da máquina,
diminuindo assim o intervalo de tempo da manutenção preventiva do motor e da máquina. Há a
possibilidade de montar uma chave de partida Y – D com reversão, porém, no método mais simples
de inversão, no qual será mostrado a seguir, a inversão poderia ocorrer sem a parada total do motor.
Para que haja a inversão deve-se aguardar o motor parar totalmente. Caso essa observação de notar
a parada total do motor seja dificultosa, deve-se então, prever o tempo de parada por inércia do
motor, ou da carga acionada, e, adicionar / incrementar esse valor de tempo no temporizador através
do ajuste de tempo no dial do mesmo.
Para ser aplicado a chave de partida Y – D, o valor de tensão de bobina deve ser igual ao
valor de tensão de linha da rede. Como na partida o motor estará ligado por um intervalo de tempo em
estrela, o motor irá receber sobre seus terminais das bobinas o valor de tensão de fase da rede, que é
raiz de três vezes menor que da tensão de linha. Exemplos de tensão de bobina de motores e valores
de tensão de linha / tensão de fase de redes de alimentação onde se possam ligar motores com a
chave de partida Y – D.: Motor 380/660 Vac – Rede 380/220 Vac; Motor 220/380 Vac – Rede 220/127
Vac ou 220/110 Vac.
Motor 380/660 Vac – Rede 380/220 Vac, na partida o motor recebe, por estar ligado em
estrela, 220Vac (UF), após quando ligado em triangulo, recebe 380 Vac (UL).
O princípio de funcionamento da chave de partida Y-D se baseia em:
Designando :
Un: tensão nominal
Uf: tensão de fase
X: reatância por fase
In: corrente nominal de alimentação Ip: corrente de partida por fase
K: constante relacionada à forma construtiva do motor
M: momento ou conjugado de partida, proporcional ao quadrado de Uf
74
E baseado no esquema de ligação dos enrolamentos, a seguir,
Figura 8.8 Ligação dos rolamentos
Relacionando entre si a corrente de alimentação e os momentos de partida, resulta que,
passando da ligação estrela para a triângulo, temos a relação de 1:3, como segue:
O gráfico abaixo demonstra o comportamento da corrente elétrica absorvida por um motor
elétrico em função do escorregamento, assim como a curva do torque produzida pelo motor partindo
com uma chave do tipo estrela – triângulo. O pico de corrente é ocasionado pelo degrau de tensão
que ocorre quando da comutação de estrela para triangulo.
75
Figura 8.9 Ligação dos enrolamentos de um Motor na Chave de Partida Y – D
76
Multifilar
Unifilar
Figura 8.10 Esquema de força da chave de partida y – d automática no modo multifilar e no modo unifilar
Sendo:
Q1,2 + k1,2,3 + FT1: Q = seccionador porta-fusível, com função de proteção contra curtocircuito sem contato auxiliar NF (95-96) para comando; k = (k1+k3) contator de força com função de
estabelecer e interromper a alimentação do motor na partida em estrela sendo K3 com função de
fechar o centro da estrela da ligação do motor; k1+k2 fecham a ligação triângulo; FT1 = relé de
sobrecarga bimetálico com função de proteção contra sobrecargas, através da inserção de seu
contato auxiliar para comando NF (95-96) no esquema de comando.
77
Figura 8.11 Esquema de comando da chave de partida y – d automática
L1 e L2: alimentação do comando conforme tensão de bobina do contator. Normalmente a
bobina do contator é fabricada para: 380, 220 ou 110 Vac, ou 48, 24 ou 12 Vdc; por isso a
necessidade ora do uso do F22.
F21 e F22: fusíveis, ou disjuntor mono ou bipolar, para proteção do circuito do comando,
sendo F22 de uso obrigatório quando o circuito de comando alimentado entre fases, ou entre positivo
e negativo.
NF de Q1 ou NF de FT1 (95-96): contato auxiliar dos dispositivos de proteção com função de
proteção do motor indiretamente com a abertura do circuito alimentador da bobina do contator.
SE + S0 + S1: SE = botão tipo soco para emergência, com trava; S0 = botão pulsador com
função de DESLIGA; S1 = botão pulsador com função de LIGA.
RT1: relé temporizador com função de estabelecer o tempo de comutação da ligação estrela
para triangulo.
78
Figura 8.11 Esquema de força da chave de partida y – d automática com reversão no modo multifilar
79
Figura 8.12 Esquema de comando da chave de partida y – d automática com reversão
Normalmente o ajuste de tempo no relé temporizador, para que seja feita a comutação da
ligação estrela para triangulo, é em torno de 10 a 15 segundos, conforme o torque resistente da
carga. Caso ocorre-se a comutação antes desse tempo, que é o tempo em que o motor leva pra
acelerar de 0 a aproximadamente 90% da rotação nominal, ocorreria um pico de corrente mais
elevado, podendo ser até, proporcional a corrente da partida direta (triangulo nesse caso), como
mostrado no gráfico do comportamento da corrente com o uso da chave Y – D. Quando usado
reversão na chave Y – D, e usado o comando acima, sendo esse o mais simples para tal função,
deve-se adicionar o tempo em que o motor leva para parar completamente, independente do método
de parada. Normalmente a parada é por inércia, e esse tempo deve-se ser incrementado no relé
temporizador, para evitar uma inversão do sentido de rotação estando o motor ainda em movimento
no sentido oposto.
80
8.8 - Chave de Partida Indireta Autocompensadora
ou Compensadora
Como visto na chave Y – D, o valor de tensão aplicado ao motor, na partida, fica
restringido a 58% do valor da tensão nominal. Esse valor de tensão produz um valor de conjugado
que ,por vezes, não é capaz de acionar / acelerar a máquina movida. Isso ocorre devido o conjugado
ser diretamente proporcional ao quadrado da tensão, nesse caso, o conjugado de partida, assim
como a corrente de partida, ficaria limitado a 1/3 dos valores nominais. Quando com o uso da chave Y
– D, for observado que não ocorre a aceleração em tempo hábil para efetuar a comutação de estrela
para triangulo, sem que tal procedimento ocasionasse um elevado pico de corrente e,
conseqüentemente, um elevado golpe mecânico na carga, deve-se utilizar um método de partida que
aumente o valor de tensão aplicada ao motor, na partida, para que, com esse valor de tensão, seja
produzido pelo motor um valor de conjugado maior, sendo que esse valor de conjugado maior seja
capaz de acelerar a máquina, ou seja, produza uma curva de conjugado maior que a curva do
conjugado resistente da carga.
Figura 8.13 Representação das bobinas de um autotransformador ligado em estrela
A chave de partida compensadora consistente em, na partida, alimentar o motor a partir da
derivação de um autotransformador. O autotransformador trifásico usado para essa utilidade,
normalmente é ligado em estrela e, consiste num transformador com um único enrolamento por lado,
ou fase, de um núcleo ferro-magnético. As derivações mais usuais de um autotransformador, são de
80, 65% ou 80, 65 e 50%.
81
8.8.1 Exemplo dos Valores de Tensão das Derivações de um
Autotranformador
O valor de tensão nas derivações do auto transformados são em percentuais dos valores
nominais aplicados aos terminais 100%. Lembrando que a relação existente entre a tensão de linha e
a tensão de fase é de raiz de 3.
Figura 8.14 Valores de tensão de fase e de linha em um autotransformador ligado em Y
Quando acionado o comando para partir o motor, o mesmo é alimentado a partir de uma das
derivações do autotransformador (80 ou 65%). Após atingir cerca de 90% da rotação nominal, o
motor passa a ser alimentado, por um curtíssimo intervalo de tempo, tanto a partir da derivação do
autotransformador, como pela rede de alimentação principal, até que o autotransformador é bypassado e o motor fica continuamente alimentado pela rede de alimentação principal, como será visto
a seguir. Com a chave de partida Y – D, a forma de se conseguir uma menor corrente de partida,
indiretamente através da diminuição do valor de tensão aplicada as bobinas do motor, está na forma
de como o motor está ligado na partida e de como será ligado em regime nominal. Já com a chave
autocompensadora a diminuição da tensão aplicada ao motor, e conseqüentemente diminuição da
corrente de partida, esta no fato da alimentação do motor, na partida, derivar de uma rede de
alimentação momentânea, com valores de tensão diferentes da rede de alimentação principal,
conseguido através do uso de um autotransformador.
82
8.8.2 Esquemas de Ligação dos Enrolamentos
Figura 8.15 Esquemas de Ligação dos Enrolamentos
8.8.3 Demonstração dos Cálculos com Derivação de 65%.
Figura 8.16 Demonstração de cálculos
83
8.8.4 Exemplo da Chave de Partida Autocompensadora, no Modo
Unifilar.
Valores de corrente por ramo do circuito, conforme derivação do autotransformador.
Figura 8.17 Exemplo da Chave de Partida Autocompensadora, no Modo Unifilar.
Note que não há modificação na ligação do motor. O motor pode, para quando usado uma
chave autocompensadora, ter apenas 3 terminais acessíveis, no entanto, deve estar ligado de tal
maneira a receber o correto valor de tensão nas bobinas, ou seja, a plena tensão.
Exemplos motores com 3 terminais acessíveis (ligação estrela ou triangulo já vem pronto de
fábrica através de ligação fixa soldada entre os terminais da bobina do motor):
Motor 380 Vac ligado em triangulo – Rede 380/220 Vac.
Motor 380 Vac ligado em estrela – Rede 660/380 Vac.
Motor 220 Vac ligado em triangulo – Rede 220/127 Vac ou 220/110 Vac.
Motor 220 Vac ligado em estrela – Rede 380/220 Vac.
84
Multifilar
Unifilar
Figura 8.18 Esquema de Força da Chave de Partida Autocompensadora Automática no Modo Multifilar e no Modo Unifilar
85
Figura 8.19 Esquema de comando da chave de partida autocompensadora automática
L1 e L2: alimentação do comando conforme tensão de bobina do contator. Normalmente a
bobina do contator é fabricada para: 380, 220 ou 110 Vac, ou 48, 24 ou 12 Vdc; por isso a
necessidade ora do uso do F22.
F21 e F22: fusíveis, ou disjuntor mono ou bipolar, para proteção do circuito do comando,
sendo F22 de uso obrigatório quando o circuito de comando alimentado entre fases, ou entre positivo
e negativo.
NF de Q1 ou NF de FT1 (95-96): contato auxiliar dos dispositivos de proteção com função de
proteção do motor indiretamente com a abertura do circuito alimentador da bobina do contator.
SE + S0 + S1: SE = botão tipo soco para emergência, com trava; S0 = botão pulsador com
função de DESLIGA; S1 = botão pulsador com função de LIGA.
RT1: relé temporizador com função de estabelecer o tempo de comutação da ligação em que
o motor recebe alimentação a partir da derivação do autotransformador.
86
No comando da chave de partida autocompensadora, se for garantido que a abertura de K2
ocorra somente depois do fechamento de K1, o motor fica recebendo alimentação na comutação da
chave. Para obter essa garantia é que se justifica o uso do contator KA (esquema de comando). O
contator K2 permanecendo ligado na comutação da chave autocompensadora da condição de partida
para a condição de regime do motor, ainda proporciona uma mudança menos brusca de tensão
porque estando K2 ligado, sem que K3 esteja ligado, uma parte da bobina do autotransformador fica
em série com o motor. Por tudo isso, a chave autocompensadora não provoca tranco causado pela
mudança brusca de tensão como na chave Y – D, e o golpe mecânico é de baixa intensidade.
A chave de partida autocompensadora também pode ser reversora. É pouco usual por tratarse, normalmente, de acionamentos de grandes máquinas que possuem grandes potências. Após a
partida do motor a autocompensadora fica inativa, sendo possível a sua utilização para partir outro
motor, através da combinação e intertravamentos com o comando dos outros motores.
87
IX – CHAVES DE PARTIDA ESTÁTICA;
ACIONAMENTO DE MOTORES COM CHAVES DE
PARTIDA ELETRÔNICA EM ESTADO SÓLIDO,
MICROPROCESSADA
9.1 - Chave de Partida Soft-Starter / Stop
Como vimos anteriormente, tanto a partida estrela - triângulo como a partida compensadora
provocam solavancos ao passarem de uma posição de tensão reduzida para a posição de tensão
plena. Para as cargas que exijam acionamentos suaves acopladas a motores de grande porte usa-se
atualmente a partida suave com eletrônica de potência (soft-starter). É o caso dos ventiladores,
bombas e compressores de grande porte, esteiras transportadoras de potência, máquinas de grande
momento de inércia, etc.
9.1.1 - Princípio de Funcionamento
As chaves de partida estática, ou, chaves de partida em estado sólido, assim chamados por
não haver comutação tipo ON-OFF, como o contator, são dispositivos de manobra (microprocessado),
adequado para partida e parada suave de motores assíncronos trifásicos, onde desejamos eliminar os
altos conjugados de aceleração do motor e picos de corrente na partida.
A partida suave é atualmente a mais utilizada em cargas acionadas por motores de potências
superiores, operando em categoria de emprego AC-2 e AC-3. Assim, sua aplicação é mais
encontrada em ventiladores, esteiras transportadoras, bombas, compressores, máquinas com grande
momento de inércia de modo geral, e outros semelhantes.
Dados para uma melhor especificação podem ser inseridos em um programa de simulação
em PC e um programa de comunicação para colocação em operação, gerenciamento e manobra em
PC. Através de um programa de comunicação / parametrização podemos colocá-lo em operação,
gerenciar e manobrar através de um PC.
88
Como principais características podemos mencionar:
• Aplicação no acionamento de máquinas que partem em vazio e com carga;
• Permite parametrização de tensão oferecendo uma aceleração / desaceleração progressiva
e uniforme da máquina, o que possibilita a redução da potência necessária;
• A qualidade de supervisão precisa ser de nível mais sofisticado;
• Ausência de choques mecânicos (trancos) na aceleração / desaceleração da máquina, o que
aumenta consideravelmente os intervalos de manutenção contribuindo para uma maior vida útil do
equipamento e pelas características básicas, tem substituído a partida por autotransformador
(compensadora) e estrela - triângulo.
Neste método de partida, o controle da potência fornecida na fase de partida é feita mediante
um escalonamento da fração da tensão de alimentação fornecida a cada instante, em um dado
número de semiciclos de tensão, que pode ser ajustado às características desejadas, até o seu valor
pleno. Esse programa de escalonamento é executado por meio de um par de tiristores por fase,
ligados em antiparalelo, e que atuam em função de um programa previamente estipulado. Com esse
procedimento, tem-se a possibilidade de partir do estado de repouso e chegar ao de rotação plena,
através de uma série de degraus, cuja variação atende plenamente à própria curva de carga. Nos
primeiros modelos de chaves de partida estática, as soft – starters, havia apenas a possibilidade de
controle da aceleração do motor. Ainda mais remoto, os primeiros modelos possuíam controle em
apenas uma das fases, após foi desenvolvido o de controle a duas fases, e hoje o mais utilizado é o
que tem a capacidade de controle nas três fases, melhorando a potência por fase. Ainda são
fabricados soft – starters com controle a duas fases. O que é feito na aceleração, pode ser feito, no
sentido inverso, na desaceleração, partindo-se da onda de tensão plena e chegando-se, passo a
passo, a interrupção total da ondas de tensão, como mostra a figura abaixo.
Figura 9.1 Tiristores SCR’s ligados em anti - paralelo, sendo 2 por fase, controle nas três fases
89
9.1.1.1 Período de Aceleração
No período de partida do motor é feito o controle do valor eficaz de tensão aplicado ao motor,
feito através do controle do ângulo de disparos dos tiristores SCR. O tempo de disparo é calculado
por um microprocessador que controla a eletrônica dedicada ao acionamento do gate (gatilho) dos
tiristores, que permitem a passagem de tensão, a partir da parametrização feita pelo usuário no tempo
de rampa de aceleração.
Após o período de aceleração há duas possibilidades para o uso dos tiristores:
a) Os tiristores após serem usados para controlar o ângulo de disparo dos semiciclos, até
entrar em estado de disparo em ângulo 0, ou seja, plena condução como se estivesse a carga ligada
diretamente a rede de alimentação, podem ser desacionados, ou seja, é acionado o relé de by-pass
da chave, que é montado em paralelo com cada par de tiristores por fase, e o motor recebe
alimentação diretamente da rede de alimentação. A soft – starter fica funcionando como controlador
de corrente da carga, podendo, dependendo da parametrização, desacionar a carga em caso de
alguma falha no funcionamento da carga, ou falha na rede de alimentação. Também há a
possibilidade de leitura de outras valores de grandeza referentes a carga, como fator de potência,
temperatura do dissipador de calor, valor de tensão percentual aplicada ao motor (nesse caso 100%),
entre outros.
Figura 9.2 Aceleração
b) Com o uso das chaves de partida soft-starter, em alguns modelos, há a possibilidade de
uma parametrização para economia de energia. Com essa função os tiristores não podem estar
desacionados, ou seja, o relé de by-pass deve estar desabilitado. Há uma continua supervisão na
corrente absorvida pelo motor, e os tiristores entram em estado de corte de uma parte do semiciclo,
diminuindo o valor eficaz de tensão aplicada ao motor, conseqüentemente, da corrente absorvida pelo
mesmo, como mostrado na figura a seguir. Há o inconveniente de geração de distúrbios provocados
por harmônicos, quando do uso de economia de energia.
Modo economia de energia
Figura 9.3 Otimização para carga parcial
90
9.1.1.2 Período de Desaceleraçào
Ocorre exatamente o inverso do período de aceleração. Estando os tiristores desacionados,
quando do acionamento do desligamento da carga, os tiristores entram em funcionamento em estado
de plena condução (disparo em ângulo 0); nesse momento o relé de by-pass é aberto, e o
microprocessador, em função do tempo de desaceleração parametrizado pelo usuário, aciona o
comando eletrônico para controle do ângulo de corte dos semiciclos, até chegar em estado de pleno
corte, ou seja, o desligamento do motor.
Figura 9.4 Desaceleraçào
9.1.1.3 Comportamento do conjugado acelerante de um motor com
o uso de uma chave de partida soft – starter em relação a partida
direta.
Figura 9.5 Comportamento do conjugado acelerante de um motor com o uso de uma chave de partida soft
Mm: conjugado desenvolvido a partir de uma partida a plena tensão (direta);
Msi: conjugado desenvolvido a partir de uma partida com controle do valor eficaz de tensão
aplicada ao motor (chave de partida soft – starter);
ML: conjugado resistente desenvolvido pela carga acionada.
91
9.1.1.4 Comportamento da corrente elétrica absorvida por um
motor com o uso de uma chave de partida soft – starter em relação
a partida direta.
Figura 9.6 Comportamento da corrente elétrica absorvida por um motor com o uso de uma chave de partida soft
In: corrente nominal a plena carga e plena tensão;
Ip: corrente consumida pelo motor com o uso da partida direta;
Isi: corrente consumida pelo motor com o uso da soft - starter
92
9.1.1.5 Oscilogramas comparativos entre métodos de partida
Figura 9.7 Partida direta
Figura 9.8 Partida estrela - triângulo
Figura 9.9 Partida suave soft - starter
93
9.1.2 - Tipos de Soft – Starter
A) Controle a uma fase
Há modelos no mercado que controlam apenas uma das três fases na partida. A fase
controlada, aliás, é, de fato, controlada apenas na janela de tempo de partida. Quando o motor atinge
a rotação nominal, o soft-starter funciona como um contator, ligando-o diretamente na rede de
alimentação. Veja na figura abaixo como uma fase tem sua potência limitada até o instante de plena
potência. A figura ilustra o primeiro tipo, onde apenas uma das fases, nesse caso a R é controlada
através de um circuito que adianta ou atrasa o ângulo de disparo , e cujos pulsos de disparo são
enviados ao SCR. Notem que, à medida que o tempo passa (inércia sendo vencida), o ângulo de
disparo vai diminuindo. Conforme o ângulo de disparo reduz, o de condução aumenta, permitindo que
uma maior parcela da senóide chegue na carga, aumentando o valor eficaz de tensão aplicada no
motor, conseqüentemente, maior conjugado.
Figura 9.10 Soft – starter com controle em apenas uma fase
94
B) Duas fases controladas
Essa é a arquitetura mais popular no mercado. A figura abaixo ilustra como R e T são
controladas enquanto S vai direto ao motor. Deve-se ter o cuidado quando da intervenção de
manutenção no motor pois uma das fases está diretamente conectada ao motor, ou seja, tem-se
potencial no motor.
Figura 9.11 Soft – starter com controle em duas fases, com relé de by-pass e bimetálico contra sobrecarga
95
C) Duas fases semi - controladas
Um outro tipo de soft – starter utilizado é ilustrado na figura abaixo onde é montado dois
SCR’s ligados em antiparalelo com dois diodos. Isso provê uma senóide semicontrolada nas fases R
eT (nesse exemplo) sendo que apenas um semiciclo é chaveado. . Deve-se ter o cuidado quando da
intervenção de manutenção no motor pois uma das fases está diretamente conectada ao motor, ou
seja, tem-se potencial no motor.
Figura 9.12 Soft – Starter com duas fases semi - controladas
96
D) Três fases controladas
Esse tipo de soft-starter é o que possui a melhor disponibilidade de controle e recursos
quando se necessite de uma parametrização mais refinada em função da carga acionada. Nesse tipo
de soft – starter as três fases R, S e t são controladas através do ângulo de disparo dos tiristores, que
são montados, normalmente, com dois tiristores SCR em antiparalelo e, um relé de by-pass em
paralelo com os tiristores. Com essa configuração dos tiristores tem-se mais precisamente, e maior
simetricamente, o controle da potência nas três fases.
Figura 9.13 Soft – starter com controle em três fases, com relé de by – pass e bimetálico contra sobrecargas
97
9.1.3 - Parametrização da Soft – Starter
A parametrização consiste em ajustar os parâmetros segundo as variáveis do motor e o modo
como o conjunto motor / carga / máquina / sistema ira atuar. Dependendo do modelo e do fabricante
da chave soft – starter, pode ser parametrizada das seguintes maneiras.
a) Via potenciômetros: é o modo mais simples de parametrizar uma chave de partida soft –
starter. Esse tipo de parametrização aplica-se as soft – starters mais simples, onde há, normalmente,
a parametrização do tempo de rampa de aceleração, tempo de rampa de desaceleração, tensão
inicial aplicada ao motor na partida (percentual do valor de tensão nominal aplicado na alimentação de
força da chave), e limitação da corrente consumida pelo motor.
Porta comunicação serial
Figura 9.14 Parametrização da soft – starter via potenciômetros
98
Figura 9.15 Parametrização da soft – starter via potenciômetros
99
b) Via software dedicado: esse modo de parametrização é feito através da porta de
comunicação serial (RS-232 OU RS-485) do soft – starter (quando possui essa opção) que é
conectado a uma porta de comunicação de um computador ou a uma rede (switch). É preciso, no
entanto, possuir instalado no computador o software de programação fornecido pelo fabricante, e, que
o software tenha atualizado os drives referentes a chave que se quer parametrizar, com a versão de
firmware referente ao programa instalado na soft – starter. Esses dados vêm impressos numa etiqueta
colada na chave, como também, etiquetado em cima do processador do soft – starter. Com o software
de parametrização, também é possível, além de parametrizar a soft – starter, supervisionar, em tempo
real, estando a chave on-line com o computador, seja diretamente ou através de uma rede, as
variáveis referentes ao funcionamento e comportamento da chave como também do motor, tais como,
valor de corrente do motor, valor de tensão aplicada ao motor, estado da chave (habilitada - ready, em
funcionamento – run, ou em falha – fault), entre outros.
Figura 9.16 Parametrização da soft – starter via software dedicado
100
c) Via IHM ou HMI: a parametrização via IHM é o método mais usual de se parametrizar uma
soft – starter quando essa possui IHM. Normalmente essa parametrização via IHM se faz em campo,
ou seja, no local onde está instalado a chave, seja num CCM dentro de uma sala onde se encontram
os QGBT’s, ou num CCM próximo a carga a ser acionada. Essas soft-starters geralmente também
possuem comunicação serial, mas nem sempre é possível comunicar com uma rede ou computador,
devido ao local onde se encontra a chave. As parametrizações feitas no local via porta de
comunicação serial normalmente são feitas com um laptop, e nem sempre se tem um a disposição
para tal. Para parametrizar a chave via IHM deve se ter o manual da chave com a descrição
detalhada de cada parâmetro, assim como em alguns casos, o parâmetro de desbloqueio, ou, acesso
aos parâmetros que se deseja modificar, em função sempre da carga acionada.
IHM (interface homem-máquina) de uma chave de partida
soft – starter. Para efetuar a parametrização é preciso
acessar o manual da chave e realizar a parametrização
através das teclas da IHM.
Figura 9.17 Parametrização da soft – starter via IHM
101
9.1.4 - Aplicações e Ligações Feitas com a Soft – Starter
A chave de partida soft – starter tem a mesma lógica de alimentação de uma chave de partida
comum. É preciso energizar a parte de força da chave, onde estão os tiristores, e que é o circuito que
alimenta o motor; como também a parte do comando, onde se tem as entradas digitais para
elaboração da forma de como será acionada a chave. Uma chave soft – starter, como visto, após
partir um motor, dependendo do modelo, é acionado o relé de by-pass dos tiristores (modo economia
de energia desativado) e a carga fica diretamente conectada a rede. Quando o by-pass é feito
externamente, através de um contator, a mesma chave pode, através de uma lógica de comando,
partir e parar mais de um motor.
9.1.4.1 Soft – Starter Partindo um único motor
Figura 9.18 Soft – Starter Partindo um único motor
102
9.1.4.2 Soft – Starter Partindo Vários Motores simultaneamente
Partidas simultâneas
Neste tipo de partida a potência da chave deve ser no mínimo igual a soma das potências de
todos os motores. As cargas devem ter curvas de conjugado / rotação e momentos de inércia
semelhantes.
Figura 9.19 Soft – Starter Partindo Vários Motores simultaneamente
Note que K2 está em paralelo com a chave, portanto, K2 é o by-pass que é feito com um
contator em paralelo com a chave.
103
9.1.4.3 Soft – Starter Partindo Vários Motores em Seqüência ou
Cascata
Partidas seqüenciais
Para este tipo de partida a potência da soft – starter deve ser no mínimo igual à potência
nominal do maior dos motores. Não havendo pausa entre as partidas dos motores deve-se especificar
a capacidade da soft -starter em base ao resultado da corrente eficaz. O ajuste de parâmetros para
diferentes capacidade dos motores e/ou cargas pode ser realizado através do software de
comunicação da soft - starter. Permite-se a entrada de até três diferentes jogos de parâmetros. A
partida seqüenciada pode atender motores de pólos comutáveis em suas diferentes rotações.
Figura 9.20 Soft – Starter Partindo Vários Motores em Seqüência ou Cascata
104
Partida em seqüência de 3 motores
Figura 9.21 Partida em seqüência de 3 motores com apenas uma soft - starter
105
9.1.4.4 Soft – Starter montada dentro do delta
Em alguns modelos há a possibilidade de instalação da soft-starter montada dentro do Delta
da ligação do motor. O motor tem suas fases ligadas na saída e na entrada da chave. Nem todo
modelo permite essa configuração de montagem, porém, é uma solução muito econômica. Dessa
forma a potência necessária do soft-starter cai para raiz de 3 vezes menos em função da mesma
carga. Isso significa que, no lugar de um soft-starter de 10 CV, podemos utilizar um de 10/ raiz de 3,
ou seja, 5,8 CV.
Figura 9.22 Soft – starter montada dentro do delta da ligação de um motor
106
9.2 - Inversor de Freqüência
Os inversores de freqüência são usados sempre que há a necessidade de variar a velocidade
de um motor, direta ou inversamente proporcional, em função do sistema de funcionamento de uma
máquina ou sistema. Os conversores de freqüência são equipamentos eletrônicos que fornecem total
controle sobre a velocidade de motores elétricos de corrente alternada através da conversão das
grandezas fixas de uma rede de alimentação convencional (tensão e freqüência), em grandezas
variáveis. Apesar do princípio ser o mesmo, houveram grandes mudanças entre os primeiros
conversores de freqüência e os atuais, devidas principalmente a evolução dos componentes
eletrônicos com destaque aos tiristores e aos microprocessadores digitais. A eletrônica de potência,
vem com o passar do tempo, tornando mais fácil (e mais barato) o acionamento de motores. Com isto,
sistemas que antes usavam motores CC, pela facilidade de controle, hoje podem usar motores CA de
indução graças aos inversores de freqüência, também chamados de conversores de freqüência. Em
paralelo com o avanço da eletrônica de potência, a microeletrônica, por meio de microprocessadores
e microcontroladores, tem auxiliado muito o acionamento de máquinas CA, em particular os
inversores de freqüência, com funções que possibilitam cada vez mais controlar uma gama maior de
variáveis do motor. Os inversores de freqüência podem substituir, com vantagens, os sistemas de
controle de fluxo com válvulas (bombas) ou dampers (ventiladores / exaustores). Vários sistemas
produção utilizam basicamente motores elétricos e controladores. Nos sistemas convencionais os
controladores
de
vazão,
pressão
e
temperatura
comandam
válvulas
e/ou
dampers
de
estrangulamento, desperdiçando a energia elétrica. Nos sistemas atuais, as válvulas de
estrangulamento estão sendo substituídas por inversores de freqüência, acionando os motores
principais. A grande vantagem de utilização de inversores é que além de gerar economia de energia
também reduz o custo de instalação do sistema. Os inversores variam as velocidades dos motores de
acordo com a maior ou menor necessidade de vazão ou pressão ou temperatura de cada zona de
controle. Ao diminuir a velocidade, os inversores proporcionam grande economia de energia. Tal
efeito não ocorre, como por exemplo, com as válvulas tradicionais onde a vazão é reduzida, porém, o
motor continua operando na mesma velocidade - pressionando o fluído sobre a entrada da válvula,
absorvendo a mesma potência. Outra vantagem que se pode obter utilizando inversores de freqüência
é a possibilidade de redução dos custos de manutenção. Os inversores possibilitam que os motores
sejam acionados suavemente, sem trancos. Com isso, reduz-se a quebra de elementos de
transmissão como correntes e rodas dentadas, ocorrências freqüentes em virtude do esforço adicional
provocado pelos motores com partida direta.
107
9.2.1 - Princípio de Funcionamento do Inversor de Freqüência
O princípio de funcionamento de um inversor de freqüência, está no fato de que a velocidade
síncrona de um motor é função da freqüência da rede de alimentação e do número de pólos do motor.
O número de pólos do motor é imutável para um motor com apenas um enrolamento por fase e por
ranhura, e é função característica da montagem do motor. Como visto anteriormente, os motores
dahlander e os motores com mais de um enrolamento na armadura, variam de velocidade, mas pela
mudança de número de pólos do motor, conforme a ligação feita. As variações de velocidade são
sempre fixas e proporcionais ao número de pólos. Quando há um motor com apenas um enrolamento,
o número de pólos é fixo, logo a rotação do motor também. Para esse motor, quando há a variação da
freqüência da rede de alimentação, há também a variação da velocidade do mesmo, proporcional a
variação da freqüência. Logo, o inversor de freqüência deve controlar a freqüência do sinal que
alimenta o motor.
Para conseguir fazer essa variação na freqüência da rede de alimentação, o inversor de
freqüência é alimentado pela rede elétrica disponível, que no caso do Brasil a freqüência da rede é de
60Hz. Após a entrada de alimentação (CA) no inversor a tensão é retificada para tensão contínua
(CC). O sinal alternado conseguido para alimentar o motor é feito através de uma técnica chamada de
PWM, ou modulação por largura de pulso, que reconstrói o valor de tensão na saída do inversor,
porém com uma freqüência definida pelo usuário que pode ser de 0Hz, a até (dependendo do modelo
e do fabricante) em torno de 500Hz.
108
9.2.1.1 Blocodiagrama de um inversor de freqüência
Figura 9.23 Blocodiagrama de um inversor de freqüência
Um inversor de freqüência é formado basicamente por quatro blocos distintos:
•
CPU
CPU - A CPU (unidade central de processamento) de um inversor de freqüência pode
ser formada por um microprocessador ou por um microcontrolador (CLP). Isso
depende apenas do fabricante. De qualquer forma, é nesse bloco que todas as
informações (parâmetros e dados do sistema) estão armazenadas, visto que também
uma memória está integrada a esse conjunto. A CPU não apenas armazena os dados
e parâmetros relativos ao equipamento, como também executa a função mais vital
para o funcionamento do inversor: geração dos pulsos de disparo, através de uma
lógica de controle coerente, para os IGBT’s.
•
IHM
O segundo bloco é a IHM (Interface Homem Máquina). É através desse dispositivo
que se pode visualizar (display) o que está ocorrendo no inversor, ou seja,
supervisionar os estados e as variáveis pertinentes ao acionamento do motor , e
configurá-lo de acordo com a aplicação pelas teclas de acesso, incremental e
decremental.
109
•
Interfaces
A maioria dos inversores pode ser comandada através de dois tipos de sinais:
Analógicos ou digitais. Normalmente, quando se quer controlar a velocidade de
rotação de um motor CA com inversor, utiliza-se tensão, ou corrente, analógica de
comando proporcional a uma variável, como pressão, temperatura, vazão, velocidade
referencial, etc. Essa tensão, ou corrente, situa-se entre 0 e 10 Vdc, no caso de
tensão, e entre 0 a / ou 4 a 20 mA, no caso te corrente. A velocidade de rotação (rpm)
será proporcional ao seu valor, por exemplo, com uma parametrização linear:
1 Vdc = 1000 RPM, 2Vdc = 2000 RPM.
Para inverter o sentido de rotação basta inverter a polaridade do sinal analógico (de 0
a 10 Vdc sentido horário, e –10 á 0 Vdc sentido anti-horário). Além da interface
analógica, o inversor possui entradas digitais, com sinais de tensão, normalmente em
24 Vdc ou 220 Vac. Através da parametrização seleciona-se em uma lista, as
possibilidades referentes à função de cada entrada digital, tais como, ligar, habilitar,
reset de erro, inversão do sentido de rotação, desliga, parada de emergência, entre
outros
•
Etapa de potência
A etapa de potência é constituída por um circuito retificador de onda completa, que
alimenta através de um circuito intermediário chamado “barramento DC” ou “link DC”.
A entrada de alimentação no inversor é em CA, provindo da rede de alimentação
principal (60 ou 50Hz). Após a retificação de CA para CC é feito uma filtragem na
forma de onda retificada, através de capacitores (as vezes com indutores também),
para formar uma tensão CC mais linear, ou seja, diminuir o riplle. Essa tensão CC
alimenta o link DC onde estão instalados os módulo de transistores do tipo IGBT,
onde a tensão DC é, através do sistema PWM (Modulação da Largura de Pulsos)
transformada novamente em CA, mas com valores de freqüência ajustáveis,
conforme uma lógica de funcionamento desenvolvido na parametrização do inversor
de freqüência, no qual ira alimentar o motor
110
9.2.1.2 Princípio de Funcionamento do Inversor de Freqüência
Simplificada
Figura 9.24 Princípio de Funcionamento do Inversor de Freqüência Simplificada
9.2.1.3 Etapa de Retificação
A tensão CA provinda da rede de alimentação e transformada em tensão CC.
Figura 9.25 Etapa de Retificação
a) Retificação a partir de uma alimentação monofásica;
b) Retificação a partir de uma alimentação trifásica.
111
9.2.1.4 Etapa Retificação Completa
Figura 9.26 Etapa Retificação Completa
Tensão CA da rede de alimentação retificada em tensão CC ondulada, através de um
retificador trifásico controlado com tiristores.
9.2.1.5 Etapa Pós Retificação ou Filtragem
Nessa etapa é feita uma redução do teor de tensão CA na onda de tensão CC, ou seja,
diminuição do riplle.
Figura 9.27 Etapa Pós Retificação ou Filtragem
112
9.2.1.6 Etapa de Inversão ou Conversão de Tensão CC em Tensão
CA
•
O Inversor
O inversor é a última conexão do inversor de freqüência antes do motor e o ponto final onde a
adaptação da tensão de saída ocorre.
Do circuito intermediário o conversor pode receber tanto:
• Uma corrente contínua variável
• Uma tensão contínua variável
• Uma tensão contínua constante.
Em todos os casos o inversor assegura que a saída para o motor se torna variável. Em outras
palavras, a freqüência para o motor é gerada no inversor. Se a corrente ou tensão são variáveis, o
inversor gera apenas a freqüência. Se a tensão é constante o inversor gera a tensão e a freqüência.
Mesmo que os inversores trabalhem de formas diferentes, sua estrutura básica é sempre a mesma.
Os componentes principais são semi condutores controláveis, colocados em para em três ramos.
Atualmente os tiristores tem sido largamente substituídos pelos transistores que podem ser
chaveados de forma mais rápida. Apesar de depender do tipo de semicondutor utilizado, a freqüência
de chaveamento esta tipicamente entre 300Hz e 20kHz. Os semi condutores no inversor são ligados e
desligados por sinais gerados no circuito de controle. Os sinais podem ser controlados de diversas
formas.
Figura 9.28 Inversor Tradicional.
Inversores tradicionais, trabalhando principalmente com circuitos intermediários de tensão
variável, consistem de seis diodos, seis tiristores e seis capacitores. Os capacitores habilitam os
tiristores a chavear, de forma que a corrente esteja defasada 120º elétricos nas bobinas do motor e
113
devem ser adaptadas ao tamanho do motor. Um campo girante intermitente com a freqüência
desejada é produzido quando os terminais do motor são excitados com corrente U-V, V-W, W-U, U-V
e assim sucessivamente. Mesmo que isso faça a corrente do motor quase quadrada, a tensão do
motor é quase senoidal. Entretanto, sempre existem picos de tensão quando a corrente é chaveada.
Os diodos isolam os capacitores da corrente de carga do motor.
Figura 9.29 Inversor para tensão constante ou variável e a saída que depende da freqüência de chaveamento dos transistores.
Em inversores com circuitos intermediários de tensão constante ou variável existem seis
componentes chaveadores e independentemente do tipo de semicondutor utilizado, a função é
basicamente a mesma. O circuito de controle chaveia os semicondutores utilizando-se das mais
diversas técnicas de modulação, mudando, dessa forma, a freqüência de saída do inversor. A
primeira técnica trabalha com tensão ou corrente variável no circuito intermediário. Os intervalos em
que os semicondutores individualmente são conduzidos são colocadas numa seqüência que é usada
para se obter as freqüências de saída desejada. Essa seqüência de chaveamento é controlada pela
amplitude da tensão ou corrente do circuito intermediário.
Utilizando-se um oscilador controlado por tensão, a freqüência sempre obedece a amplitude
da tensão. Esse tipo de inversor é chamado de PAM (Pulse Amplitude Modulation ou Modulação por
amplitude de pulso). A outra principal técnica usa um circuito intermediário de tensão constante. A
tensão no motor é conseguida aplicando-se a tensão do circuito intermediário por períodos mais
longos ou mais curtos.
114
Figura 9.30 Modulação por amplitude e por largura de pulso.
A freqüência é mudada através da variação dos pulsos de tensão ao longo do eixo do tempo
– positivamente para meio período e negativamente por o outro meio. Como a técnica muda a largura
dos pulsos de tensão, ela é chamada de PWM (Pulse Width Modulation ou Modulação por Largura de
Pulso). PWM (e técnicas relacionadas com ela como PWM controlada pelo seno) é a técnica mais
utilizada no controle dos inversores. Nas técnicas PWM o circuito de controle determina os tempos de
chaveamento dos semicondutores através da intersecção entre um tensão triangular e uma tensão
senoidal superposta (PWM controlada pelo seno).
•
O Circuito de Controle
O circuito de controle ou placa de controle do conversor de freqüência tem quatro tarefas
essenciais:
• Controlar os semicondutores do conversor de freqüência.
• Troca de dados entre o conversor de freqüência e os periféricos.
• Verificar e reportar mensagens de falha.
• Cuidar das funções de proteção do conversor de freqüência e do motor.
Os microprocessadores têm aumentado sua capacidade de processamento e velocidade,
aumentando significativamente o número de aplicações possíveis aos conversores de freqüência e
reduzindo o número de cálculos necessários a sua aplicação. Com os microprocessadores o
processamento é integrado dentro do conversor de freqüência e este está apto a determinar o melhor
padrão de chaveamento para cada estado de operação.
•
Características de torque do motor.
Se um inversor de freqüência fosse capaz de fornecer uma corrente muitas vezes maior que a
corrente nominal do motor, a sua característica de torque seria como visto na figura a seguir. Mas
correntes dessa magnitude podem danificar tanto o motor como o conversor de freqüência.
Conseqüentemente o conversor de freqüência indiretamente limita os valores de corrente através da
redução da tensão e da freqüência. O limite de corrente é variável e garante que o motor não ficará
115
excedendo por muito tempo sua corrente nominal. Visto que o conversor de freqüência controla a
velocidade do motor independentemente da carga, é possível parametrizar diferentes limites dentro
da faixa de trabalho do motor. As características de torque do motor estão dentro dos valores
nominais para alguns tipos conversores de freqüência. Entretanto, seria uma vantagem se o
conversor permitisse que o torque atingisse 160% do torque nominal por exemplo. É também normal
que o inversor opere o motor numa velocidade acima da velocidade síncrona como por exemplo
200% da velocidade nominal. O conversor de freqüência não consegue fornecer uma tensão maior
que a tensão de alimentação o que leva a um declínio da relação tensão - freqüência se a velocidade
nominal for excedida. O campo magnético enfraquece e o torque gerado pelo motor cai na razão de
1/n.
Figura 9.31 Torque e sobre-torque do motor
A corrente máxima de saída do conversor se mantém constante. Isso leva a uma potência
constante de saída mesmo com velocidades acima de 200%.
Figura 9.32 Performance do motor
116
9.2.1.7 Tipos Usuais de Modulaçao da Largura de Pulso (PWM)
•
Princípio de funcionamento do PWM (modulação de largura de pulsos)
Figura 9.33 Princípio de funcionamento do PWM (modulação de largura de pulsos)
Vantagens: Sem ruído gerado pelo conversor; balanço econômico.
Desvantagens: Ruído elétrico do motor; qualidade do acionamento se f (HZ) menor de 5Hz;
O motor é alimentado por uma onda de tensão de amplitude e freqüência variáveis. Os pulsos
de tensão têm uma amplitude constante mas são recortados a fim de se obter a tensão média
desejada.
•
Princípio de funcionamento do pwm senoidal (modulação de largura de pulsos senoidal)
Figura 9.34 Princípio de funcionamento do pwm senoidal (modulação de largura de pulsos senoidal)
Vantagens: sem ruído do conversor; qualidade rotação; balanço econômico.
Desvantagens: ruído elétrico do motor.
117
9.2.1.8 Forma de Onda da Tensão e Corrente Gerada por Controle
por PWM Analisando uma Fase
Figura 9.35 Forma de Onda da Tensão e Corrente Gerada por Controle por PWM Analisando uma Fase
9.2.1.9 Forma de Onda da Tensão e Corrente Gerada por Controle
por PWM Analisando Três Fases
Figura 9.36 Forma de Onda da Tensão e Corrente Gerada por Controle por PWM Analisando Três Fases
118
9.2.2 - Características dos Conversores de Freqüência PWM
Conversores estáticos indiretos de freqüência com tensão imposta PWM são atualmente
os equipamentos mais empregados para a alimentação de motores de baixa tensão nas aplicações
industriais que requerem variação de velocidade. Eles operam como uma interface entre a fonte de
energia (rede) e o motor de indução. O processo de obtenção da tensão e freqüência desejadas por
meio de tais equipamentos passa por três estágios:
•
Ponte de diodos - Retificação do sinal alternado - de tensão e freqüência constantes
proveniente da rede de alimentação;
•
Filtro ou Link DC - Alisamento/regulação da tensão retificada com armazenamento de
energia por meio de um banco de capacitores;
•
Transistores IGBT - Inversão da tensão contínua proveniente do link DC num sinal
alternado, com tensão e freqüência variáveis.
O diagrama a seguir ilustra as etapas descritas acima
Figura 9.37 Diagrama do processo de obtenção da tensão e freqüência desejadas
Observações:
Quando o motor está em vazio ou com cargas leves, a tensão n o link DC tende a estabilizar
no valor igual a
.
Quando, porém, o motor está com cargas
tensão no link DC tende ao valor
mais elevadas (por exemplo, plena carga), a
.
119
9.2.3 – Tipos de Inversor de Freqüência
Os inversores de freqüência são construídos basicamente de duas maneiras:
a) Com circuito intermediário: há a etapa de retificação da onda de alimentação em CC, e
após há a reconstrução da forma de onda da alimentação novamente em CA, com valores de
freqüência ajustáveis. Há os que podem ser alimentados por uma rede mono ou bifásica, e saída
trifásica, como os que são alimentados por uma rede trifásica e saída trifásica.
b) Sem circuito intermediário: não há a etapa de retificação, há apenas a reconstrução da
forma de onda da alimentação novamente em CA, com valores de freqüência ajustáveis. Esse
inversor já é alimentado em CC, num valor de tensão em torno de 400Vdc, que é a tensão média no
link DC da maioria dos inversores fabricados, por isso não há a necessidade de converter CA – CC –
CA, o que o torna mais leve e menos volumoso do que o inversor com circuito intermediário, por não
haver os diodos retificadores nem o capacitor, que normalmente possui um considerável volume.
Dentre os dois tipos de inversores, o mais usual hoje são os inversores com circuito
intermediário, pois a rede de alimentação distribuída é em CA. Porém o uso do inversor sem circuito
intermediário esta cada vez mais se difundido, pois, os inversores por trabalharem em valores de
freqüência diferentes (até 500Hz) da freqüência fundamental (50 ou 60Hz), geram ruídos
(harmônicos) na rede de alimentação que prejudicam o funcionamento e diminui a vida útil de outros
equipamentos que estão alimentados na mesma rede, o que é atenuado com o uso do inversor sem
circuito intermediário, pois o mesmo é alimentado por uma fonte CC, que funciona como um filtro.
Os inversores com circuito intermediário, como visto acima, podem ser alimentados tanto por
uma rede mono ou bifásica, entre 200 a 240 Vac, e saída trifásica também com valores de tensão
entre 200 a 240 Vac, como por uma rede de alimentação trifásica, entre 200 a 500 Vac, e saída
trifásica entre 200 a 460 Vac.
120
Figura 9.38 Etapas do processo de obtenção de tensão e freqüência CA variável por PWM
Figura 9.39 Inversores com alimentação trifásica e saída trifásica
121
9.2.4 - Aplicações e Ligações Feitas com o Inversor de Freqüência
Conexões das entradas e saídas digitais
e analógicas, para montagem do
esquema de comando.
Conexões da entrada de alimentação do
inversor e saída de força para o motor.
Figura 9.40 Ligação da força num inversor de freqüência com alimentação mono ou bifásica
122
Figura 9.41 Ligação das entradas e saídas digitais, ligação das entradas analógicas, suas funções e características
Figura 9.42 Exemplo de ligação do comando num inversor de freqüência
123
9.2.5 - Controle de Velocidade de Um Motor Trifásico Alimentado
por um Inversor de Freqüência
9.2.5.1 Definição de sistemas de Controle
Controle em Malha Aberta: Um Sistema de Controle em Malha Aberta (SCMA) utiliza um
controlador conectado em série com o processo a ser controlado, de modo que a entrada do processo
deve ser tal que sua saída se comportará como desejado. A característica importante é que a ação de
controle independe da saída.
Observe-se que um sistema de controle deste tipo fornecerá a saída desejada se não
ocorrerem perturbações externas que alterem o valor da saída ou alterações paramétricas internas do
sistema. Se alguma destas ocorrer, a saída muda, mas a ação de controle continua exatamente a
mesma.
Controle em Malha Fechada: Um Sistema de Controle em Malha Fechada (SCMF) utiliza uma
medida adicional da saída (resposta) real afim de compará-la com a resposta desejada do sistema.
O SCMF também é chamado Servomecanismo. O termo servomecanismo era originalmente
empregado para denotar uma classe de sistemas de controle para os quais a referência era
constante. Atualmente o termo servomecanismo é usado em sentido amplo, significando Sistema de
Controle em Malha Fechada (SCMF). No entanto, usa-se ainda a expressão problema de
servomecanismo em conexão com o objetivo de seguir uma referência constante e problema de
rastreamento, em conexão com o objetivo de seguir uma referência que varia com o tempo. Embora o
conceito SCMA (sistema de controle em malha aberta) seja usado, sistemas de controle reais são
essencialmente de malha fechada. Isto leva à definição geral de sistemas de controle.
Sistema de Controle: é um sistema que tende a manter uma relação pré-estabelecida entre
duas variáveis do sistema através da comparação de funções destas variáveis e utilizando a diferença
como meio de controle.
124
9.2.5.2 Modos de controle do Inversor de Freqüência
Basicamente existem dois tipos de controle dos conversores eletrônicos: o escalar e o
vetorial.
O controle escalar baseia-se no conceito original do conversor de freqüência: impõe no motor
uma determinada tensão/freqüência, visando manter a relação V/f constante, ou seja, o motor
trabalha com fluxo aproximadamente constante. É aplicado quando não há necessidade de respostas
rápidas a comandos de torque e velocidade e é particularmente interessante quando há conexão de
múltiplos motores a um único conversor. O controle é realizado em malha aberta e a precisão da
velocidade é função do escorregamento do motor, que varia em função da carga, já que a freqüência
no estator é imposta. Para melhorar o desempenho do motor nas baixas velocidades, alguns
conversores possuem funções especiais como a compensação de escorregamento (que atenua a
variação da velocidade em função da carga) e o boost de tensão (aumento da relação V/f para
compensar o efeito da queda de tensão na resistência estatórica), de maneira que a capacidade de
torque do motor seja mantida. O controle escalar é o mais utilizado devido à sua simplicidade e devido
ao fato de que a grande maioria das aplicações não requer alta precisão e/ou rapidez no controle da
velocidade.
O controle vetorial possibilita atingir um elevado grau de precisão e rapidez no controle do
torque e da velocidade do motor. O controle decompõe a corrente do motor em dois vetores: um que
produz o fluxo magnetizante e outro que produz torque, regulando separadamente o torque e o fluxo.
O controle vetorial pode ser realizado em malha aberta (“sensorless”) ou em malha fechada (com
realimentação).
Com sensor de velocidade – requer a instalação de um sensor de velocidade (por exemplo,
um encoder incremental) no motor. Este tipo de controle permite a maior precisão possível no controle
da velocidade e do torque, inclusive em rotação zero.
Sensorless – mais simples que o controle com sensor, porém, apresenta limitações de torque
principalmente em baixíssimas rotações. Em velocidades maiores é praticamente tão bom quanto o
controle vetorial com realimentação. As principais diferenças entre os dois tipos de controle são que o
controle escalar só considera as amplitudes das grandezas elétricas instantâneas (fluxos, correntes e
tensões), referindo-as ao estator, e seu equacionamento baseia-se no circuito equivalente do motor,
ou seja, são equações de regime permanente. Já o controle vetorial admite a representação das
grandezas elétricas instantâneas por vetores, baseando-se nas equações espaciais dinâmicas da
máquina, com as grandezas referidas ao fluxo enlaçado pelo rotor, ou seja, o motor de indução é visto
pelo controle vetorial como um motor de corrente contínua, havendo regulação independente para
torque e fluxo.
125
Como visto há duas formas usuais de controlar a velocidade de um motor acionado por um
inversor de freqüência.
a) Controle Sensorless ou Controle em Malha aberta: controle onde é feito uma estimativa da
velocidade do motor, segundo o número de pólos do motor, a corrente absorvida pelo motor
(fornecida pelo inversor), tensão fornecida ao motor, a freqüência em que está sendo alimentado o
motor, entre outras variáveis. É o método mais simples, onde a freqüência e a tensão são ajustadas
de forma a manter a relação V/F constante, ou seja, fluxo aproximadamente constante para manter o
torque constante. É um tipo de controle em malha aberta. O seu sucesso depende do tipo de carga
que o motor aciona, principalmente da curva de conjugado de carga (constante, linear, quadrático,
etc). É o tipo de acionamento usado onde não há fortes acelerações e desacelerações envolvidas,
também em função da carga.
Figura 9.43 Controle em malha aberta da velocidade de um motor ca
a) Modelo ideal para controle em malha aberta;
b) Modelo equivalente para controle em malha aberta.
Figura 9.44 Controle de velocidade em malha aberta ou controle sensorless
126
Figura 9.45 Modo do controle de velocidade em malha aberta Controle Vetorial
b) Controle com Encoder ou Controle em Malha fechada: controle onde a velocidade do motor
é controlada e ajustada a partir de um feedback da velocidade de rotação do eixo do motor. O
controle em malha fechada, utiliza um encoder ou um resolver acoplado diretamente no eixo do
motor, ou através de um flange entre o motor e a carga. O sinal gerado pelo encoder (tacogerador) é
exatamente a mesma velocidade desenvolvida no eixo do motor. Esse sinal é reenviado ao
controlador (realimentado), ou seja, enviado a uma entrada do inversor de freqüência para encoder,
normalmente analógica com resolução entre 8 a 12 bits. O sinal gerado pelo encoder é comparado
com o sinal de referência para velocidade do motor. O sinal de referência para velocidade do motor é
criado por um algoritmo de controle do inversor para essa finalidade segundo uma série de grandezas
e variáveis tais como o número de pólos do motor, a corrente absorvida pelo motor (decomposta em
Id e Iq) fornecida pelo inversor, tensão fornecida ao motor, a freqüência em que está sendo
alimentado o motor, entre outras variáveis.
A partir dessa comparação, o erro (diferença) entre o sinal de referência do inversor e o sinal
gerado pelo encoder, é compensado com um sinal resultante, de maneira a diminuir o erro. Isso quer
dizer que com a compensação do sinal, o erro entre o sinal de referência do inversor tenderá sempre
a ser igual ao sinal gerado pelo encoder, fazendo com que o controle da velocidade seja
extremamente o mais fiel com aquilo desejado para o funcionamento da máquina. Sempre que se
necessite de um ajuste fino da velocidade de um motor CA, sendo o mesmo alimentado por um
inversor de freqüência, deve-se utilizar um inversor que possua entrada para realimentação, pois esse
item não é disponível em todos modelos e versões de inversores.
127
Figura 9.46 Controle em malha fechada da velocidade de um motor ca
a) Modelo ideal para controle em malha aberta;
b) Modelo equivalente para controle em malha aberta.
Figura 9.47 Controle de velocidade em malha fechada ou controle com encoder
Figura 9.48 Inversor de freqüência com realimentação de velocidade proporcionada através do sinal gerado pelo encoder, e
com sinal de posicionamento gerado por um resolver
128
9.2.6 - Parametrização do Inversor de Freqüência
A parametrização consiste em ajustar os parâmetros segundo as variáveis do motor e o modo
como o conjunto motor / carga / máquina / sistema ira atuar. Dependendo do modelo e do fabricante
da chave soft – starter, pode ser parametrizada das seguintes maneiras.
a) Via software dedicado: esse modo de parametrização é feito através da porta de
comunicação serial (RS-232 OU RS-485) do inversor de freqüência que é conectado a uma porta de
comunicação de um computador ou a uma rede (switch). É preciso, no entanto, possuir instalado no
computador o software de programação fornecido pelo fabricante, e, que o software tenha atualizado
os drives referentes à chave que se quer parametrizar, com a versão de firmware referente ao
programa instalado no inversor de freqüência. Esses dados vêm impressos numa etiqueta colada no
inversor, como também, etiquetado em cima do processador do inversor de freqüência. Com o
software de parametrização, também é possível, além de parametrizar o inversor, supervisionar, em
tempo real, estando o inversor on-line com o computador, seja diretamente ou através de uma rede,
as variáveis referentes ao funcionamento e comportamento do inversor como também do motor, tais
como, valor de corrente do motor, valor de tensão aplicada ao motor, freqüência na saída do inversor,
tensão no link DC, estado do inversor (habilitada - ready, em funcionamento – run, ou em falha –
fault), entre outros.
Figura 9.49 Parametrização do inversor de freqüência via IHM
129
b) Via IHM ou HMI: a parametrização via IHM é o método mais usual de se parametrizar um
inversor de freqüência. Normalmente essa parametrização via IHM se faz em campo, ou seja, no local
onde está instalado o inversor, seja num CCM dentro de uma sala onde se encontram os QGBT’s, ou
num CCM próximo a carga a ser acionada. Os inversores de freqüência também possuem uma porta
de comunicação, mas nem sempre é possível comunicar com uma rede ou computador, devido ao
local onde se encontra a chave. As parametrizações feitas no local via porta de comunicação
normalmente são feitas com um laptop, e nem sempre se tem um a disposição para tal. Para
parametrizar o inversor via IHM deve se ter o manual do mesmo com a descrição detalhada de cada
parâmetro, assim como em alguns casos, o parâmetro de desbloqueio, ou, acesso aos parâmetros
que se deseja modificar, em função sempre da carga acionada.
IHM (interface homem-máquina) de um inversor de
freqüência. Para efetuar a parametrização é preciso acessar
o manual do inversor e realizar a parametrização através das
teclas da IHM.
Figura 9.50 Parametrização do inversor via IHM
130
X - DISPOSITIVOS DE PROTEÇÃO
10.1 Disjuntores
Dispositivo mecânico de manobra, capaz de estabelecer, conduzir e interromper correntes em
condições normais de operação e também estabelecer e conduzir por um intervalo especificado de
tempo, correntes sob condições anormais específicas como aquelas resultantes de um curto-circuito.
10.1.1 Tipo de Disjuntor
•
Disjuntor seco
Disjuntor cujos contatos principais operam ao ar sob pressão atmosférica.
•
Disjuntor de potência
Disjuntor aberto para elevadas correntes (PCB . Power Circuit Breaker)
•
Disjuntor em caixa moldada (MCCB . Molded Case Circuit Breaker)
Disjuntor montado em caixa moldada em material isolante que o suporta e o encerra.
•
Disjuntor extraível
Aquele que é montado em uma estrutura na qual pode ser movimentado entre as
posições conectado, desconectado e de teste ou da qual pode ser retirado sem desparafusar
conexões ou suportes de montagem.
•
Disjuntor termo-magnético
Disjuntor que possui um disparo que atua pelo efeito térmico de uma corrente de
sobrecarga e um disparo instantâneo pelo efeito eletromagnético de uma corrente de curtocircuito. O disparo térmico geralmente é obtido por uma lâmina bimetálica e o instantâneo por
uma solenóide. Ambos podem ser substituídos por disparo de comando eletrônico.
131
•
Disjuntor com operação por energia acumulada
Disjuntor capaz de operar em determinada sequência de manobras usando a energia
acumulada em seu mecanismo de comando sem intervenção externa. O mecanismo mais
comum é o que acumula energia em molas e capaz de executar um conjunto de manobras
desliga-liga-desliga sem necessidade de recarregar as molas.
•
Disjuntor limitador de corrente
É aquele cujo tempo de interrupção é suficientemente curto para não deixar que a
corrente de curto-circuito atinja seu valor de crista máximo.
Isto é conseguido em alguns tipos de disjuntores com a separação dos contatos pela
força de repulsão devida à corrente de curto-circuito e a extinção do arco na câmara de
extinção. A abertura definitiva dos contatos será dada pelo disparador. As figuras abaixo
exemplificam alguns tipos de disjuntores limitadores.
Figura 10.1 Funcionamento Disjuntor Limitador de Corrente
•
Contatos auxiliares e de alarme
São os operados mecanicamente pelo disjuntor para sinalizar, intertravar ou outra finalidade.
132
10.1.2 Categoria de Utilização
Característica de um disjuntor que indica se ele é ou não destinado a ser utilizado em
seletividade pelo uso de um retardo de tempo.
•
Categoria A
Aplica-se aos disjuntores não indicados para seletividade por retardo de tempo. Estes
disjuntores não têm corrente suportável de curta duração.
•
Categoria B
Aplica-se aos disjuntores indicados para seletividade em curto-circuito por retardo de
tempo em relação a outros disjuntores ou fusíveis.
•
Impedância dinâmica
Impedância do arco elétrico estabelecido quando da abertura do disjuntor para
interrupção de uma corrente.
•
Tensão de operação nominal Un
É a máxima tensão eficaz entre fases do circuito sob a qual o disjuntor pode executar seu
ciclo nominal de operação.
•
Tensão de isolação Ui
Tensão de referência para os ensaios de tensão aplicada durante 1min na sua freqüência
de operação.
•
Tensão suportável de impulso Uimp
O valor de crista de um impulso da forma 1,2/50_s que o disjuntor pode suportar sob
condições padronizadas de ensaio.
•
Corrente nominal In
Maior corrente que o disjuntor pode conduzir permanentemente sob a tensão nominal,
sem que haja elevações de temperatura acima do valor especificado.
•
Corrente nominal de longa duração
Menor valor da corrente que provoca o desligamento do disjuntor após um intervalo de
tempo superior a uma ou mais horas.
133
Corrente suportável de curta duração Icw
•
Maior valor da corrente de curto-circuito que o disjuntor pode conduzir durante 1s sem
que haja disparo do seu mecanismo de operação. Para outros intervalos de tempo, aplicar a
relação: I2t = Constante.
10.1.3 Normas de Disjuntores no Brasil
•
NBR IEC 60947-2
Disjuntores para CA e CCTensões nominais até 1000V (CA) e 1500V (CC)
Quaisquer correntes nominais, métodos de construção e aplicações
•
NBR IEC 60898
Disjuntores para CA (50/60 Hz)
Disjuntores a ar
Tensões nominais até 440V (entre fases)
Correntes nominais até 125A
Capacidades de interrupção nominais até 25kA
Uso por pessoas não advertidas / sem manutenção
Curvas padronizadas de disparo ( tempo x corrente ) dos Disjuntores Curva B e C Segundo a
Norma NBR IEC 60898
Tempo convencional:
In até 63 A (inclusive) 6
0 minutos
In acima de 63 A 1
20 minutos
Foco Básico: Proteção de condutores contra curtos e sobrecargas.
134
Figura 10.2 Curvas de disparo segundo a norma NBR IEC 60898
É de extrema importância na especificação do disjuntor conhecer a natureza da carga, assim
escolhendo a melhor curva de disparo. O disjuntor deve proteger a instalação, porém sem provocar
disparo intempestivo.
•
Características da Curva B:
O disparador magnético durante o curto-circuito atua entre 3 e 5 x In (corrente
nominal). Destinado a proteção dos condutores que alimentam cargas de natureza
resistiva. (Ex: Chuveiros, Aquecedores, Lâmpadas Incandescentes, etc).
•
Características da Curva C:
O disparador magnético atua entre 5 e 10 x In (corrente nominal). Destinado a
proteção
dos
condutores
que
alimentam
cargas
de
natureza
indutiva.
(Ex.:Motores,bombas, Compressores, etc).
•
Características da Curva D:
O disparador magnético atua entre 10 e 50 x In (corrente nominal). Destinado a
proteção dos condutores que alimentam cargas de natureza fortemente indutiva. (Ex:
Transformadores e demais cargas com elevada corrente de partida. Acima de 10xIn
(corrente nominal).
135
•
Capacidade de interrupção
Icu
Icn : capacidade de interrupção para a qual as condições prescritas de acordo
com uma seqüência de ensaio especificada não inclui a capacidade do disjuntor
conduzir 0,85 vezes a sua corrente de não atuação durante o tempo convencional.
Ics : capacidade de interrupção para a qual as condições prescritas de acordo
com uma seqüência de ensaio especificada inclui a capacidade do disjuntor conduzir
0,85 vezes a sua corrente de não atuação durante o tempo convencional.
10.1.4 Especificação Correta de um Disjuntor Termomagnético
Características
• Tensão nominal - Ue
• Corrente nominal - IN
• Corrente de operação (ajuste) do disparador de sobrecarga - Ir
• Limiar de disparo instantâneo - Im
• Capacidade de interrupção nominal - Icu = Icn
• Corrente convencional de não atuação - Int = II
• Corrente convencional de atuação It = I2
Figura 10.3 Disjuntor Termo-magnético e suas partes constituintes
136
Figura 10.4 Disjuntores Tripolar
Figura 10.5 Disjuntores Bipolar
Figura 10.6 Disjuntor Monopolar
Figura 10. Simbologia Disjuntor Termomagnético Tripolar
137
10.2 - Disjuntores Aplicados a Proteção de Motores
Elétricos
O disjuntor é um dispositivo de proteção capaz de:
Ligar e desligar corrente nominal e sobrecorrentes de sobrecarga e curto-circuito.
A operação do disjuntor é feita manualmente ou comandada pelos réles de sobrecarga
(bimetálico ou eletrônico) e de curto-circuito (eletromagnético).
Figura 10.8 Representação esquemática de um disjuntor tripolar.
138
10.2.1 Características principais em base temperatura e altitude
definidas:
Tensão, corrente e freqüências nominais;
Correntes máximas de curto-circuito;
Os valores das características principais são gravados na carcaça ou em uma placa. Se a
temperatura e/ ou a altitude forem superiores aos valores referidos o disjuntor deverá ser ajustado em
seus valores nominais. Se a corrente máxima de interrupção do disjuntor for inferior à corrente de
curto-circuito no local de instalação, pode ser utilizado fusível em série que estará coordenado para
uma proteção de retaguarda. A curva de atuação do disjuntor tem uma faixa corrente de sobrecarga
até cerca de 10 x IN. A partir desse valor começa a atuação por uma corrente de curto-circuito.
Figura 10.9 Curvas de Disparo da Ação de Sobrecarga e Ação de Curto-Circuito
Para a proteção de motores os disjuntores-motores, devem ser preparados para se
ajustar a permitir a partida nominal e a corrente, garantindo a adequada proteção do motor.
Figura 10.10 Disjuntores – Motor para Proteção de Motores
139
10.3 Relés de Proteção Contra Sobrecarga
As sobrecargas podem ser causadas por: Rotor bloqueado; Freqüência elevada de manobra;
Partida prolongada; Sobrecarga em regime de operação; Falta de fase; Variação de tensão e
freqüência, entre outros.
A sobrecarga causa um aquecimento suportável pelos equipamentos até um valor
determinado por um intervalo de tempo limitado. A função do relé de proteção contra sobrecarga é
desligar a alimentação antes que sejam atingidos os valores de corrente e de tempo que causam
deterioração da isolação. São dois os tipos de relé de proteção contra sobrecarga, conforme princípio
construtivo:
•
Relés de sobrecarga bimetálico
•
Relés de sobrecarga eletrônico
10.3.1 O Relé de sobrecarga bimetálico
Neste relé o sensor é uma lâmina bimetálica dentro de uma espiral pela qual passa a corrente
de carga do circuito. O valor de corrente conduzida pela espiral aquece a lâmina bimetálica que se
dilata e inclina provocando o desligamento do contato que irá desenergizar a bobina abrindo o
contator ou o disparo do disjuntor desligando a carga. Note-se que este sensor atua pelo aquecimento
provocado pela corrente da carga e não atua por sobreaquecimento no motor de outras origens como
por exemplo, obstrução da entrada de ventilação.
140
A seguir é mostrado o princípio construtivo e um desenho esquemático de um relé de
sobrecarga bimetálico. A lâmina bimetálica é constituída por lâminas, soldadas, de dois metais com
coeficientes de dilatação diferentes (níquel e ferro, por exemplo) que se curva deslocando o cursor do
relé (5) que desligará o contato (2) ou o disparo do disjuntor. O relé de sobrecarga bimetálico deve se
ajustar a permitir a corrente de partida de um motor. O relé de sobrecarga bimetálico deve ter uma
curva corrente-tempo de acordo com a curva correspondente da carga que vai proteger; em outras
palavras, o relé deve de uma certa forma ser uma imagem térmica da carga.
Figura 10.11 Simbologia Relé de Sobrecarga Bimetálico com 1 contato NA e 1 contato NF
Figura 10.12 Relé de Sobrecarga Bimetálico
141
10.3.2 Relé de sobrecarga bimetálico com sensibilidade à falta de fase
O relé de sobrecarga bimetálico com sensibilidade à falta de fase apresenta duas curvas de
corrente-tempo: uma para sobrecarga trifásica e outra para falta de fase. Salientamos que a curva do
relé é feita a partir da posição da lâmina sem a passagem de corrente (estado frio) enquanto que em
serviço a lâmina estará pré-aquecida pela corrente de carga normal e o tempo real de desligamento
será menor, considerando-se aceitável um tempo da ordem de 25% do tempo à partir do estado frio.
Figura 10.13 Relé de Sobrecarga Bimetálico
142
Figura 10.14 Curvas características típicas de disparo do Relé de Sobrecarga Bimetálico
143
10.4 Relé de Sobrecarga Eletrônico
Um relé de sobrecarga eletrônico, além de atuar em função da corrente da carga, pode
detectar aquecimento do equipamento protegido. Em outras palavras, um relé de sobrecarga
eletrônico pode permitir através de sensores de temperatura no motor, a proteção contra
sobreaquecimento. O relé de sobrecarga eletrônico, além de atuar em função da corrente da carga,
pode: supervisionar a temperatura no motor através de sensores de temperatura; as curvas tempocorrente podem ser ajustadas para o tempo de partida; no caso do rotor bloqueado a atuação é
rápida.
Um relé de sobrecarga eletrônico pode incluir outras funções como detecção de corrente de
fuga. Nas figuras a seguir são apresentados desenhos esquemáticos de um relé de sobrecarga
eletrônico e suas características.
Figura 10.15 Relé de Sobrecarga Eletrônico
144
10.4.1 Disparador de curto-circuito de um disjuntor
O disparador de curto-circuito de um disjuntor pode ser do tipo eletromagnético, de atuação
instantânea e completando a proteção contra as sobrecorrentes. A construção é simples e pode ser
representada esquematicamente pela figura abaixo.
Figura 10.16 Disparador por Curto – Circuito de um Disjuntor
A passagem da corrente pela bobina (1) cria um campo magnético que por sua vez dá origem
a uma força que irá deslocar o núcleo móvel (2) em direção à base (3). Essa força é
contrabalanceada pela ação da mola que segura a peça móvel enquanto a força de atração for a
correspondente às correntes de carga (In) e sobrecarga (Ir) até ser atingida a corrente e curto-circuito
(IK).
145
10.5 - Fusíveis
É um dispositivo de proteção que, pela fusão de um ou mais de componentes especialmente
projetados e dimensionados, abre o circuito no qual está inserido e interrompe a corrente quando esta
superar um dado valor por um dado intervalo de tempo. O fusível compreende todas as partes, a
saber: a base, o corpo, os terminais, o elo fusível, o porta-fusível, e o material que extingue o arco.
10.5.1 Tensão nominal Un
É o valor eficaz da máxima tensão sob a qual é garantida a operação correta do fusível, isto é,
a tensão sob a qual ele é capaz de interromper uma dada corrente em condições especificadas de
ensaio. É também a tensão marcada no fusível e atribuída a ele pelo fabricante.
10.5.2 Corrente nominal In
É o valor eficaz da máxima corrente que pode passar permanentemente pelo fusível sem
causar sua operação ou aquecimentos de seus componentes acima do valor especificado pelas
normas. É também o valor da corrente marcada no fusível e atribuída a ele pelo fabricante.
10.5.3 Faixa de interrupção
Indica a possibilidade de um fusível conduzir correntes especificadas sem danos e ser capaz
de interromper as sobrecorrentes em uma faixa específica (faixa de capacidade de interrupção). É
indicada pela primeira letra da designação:
•
Fusíveis g
Fusíveis que podem, conduzir continuamente correntes até ao menos sua corrente
nominal e têm a capacidade de interromper correntes desde a mínima corrente de fusão
até a máxima capacidade de interrupção ( faixa completa).
•
Fusíveis a
Fusíveis que podem conduzir continuamente correntes até a sua corrente nominal e
interromper correntes acima de um valor múltiplo especificado da sua corrente nominal
até a sua capacidade nominal de interrupção.
146
10.5.4 Classes de Utilização
É a designação da classe de utilização de um fusível em conjunto com o objeto a ser
protegido. Podem ser (pela norma DIN / VDE) para as diferentes aplicações:
gR: semicondutores
gG: aplicação geral
gB: instalações de mineração
aR: semicondutores (Iint ≥ 2,7 In)
gL: condutores (fios e cabos)
aM: motores (Iint ≥ 4 In)
gTR: transformadores
Pela norma IEC 269/NBR as designações e aplicações são um pouco diferentes, embora haja
uma certa correspondência, conforme tabela que segue. Basicamente os fusíveis de uso geral da IEC
correspondem aos de faixa completa da VDE e os de retaguarda da IEC correspondem aos de faixa
parcial da VDE.
Figura 10.16 Aplicação e Designações dos Fusíveis Pela norma IEC 60269/NBR
147
10.5.5 Prescrições Relativas ao Uso e Instalação dos Fusíveis
Para a proteção de pessoas contra choques elétricos, três situações devem ser consideradas:
quando o dispositivo-fusível é montado e instalado apropriadamente com base-fusível, fusível e, onde
aplicável, peças de ajuste, porta-fusível e invólucro fazendo parte do dispositivo-fusível (condições
normais de serviço); durante a substituição do fusível; quando o fusível e, onde aplicável, o portafusível são removidos.
O dispositivo-fusível deve ser projetado de tal forma que as partes vivas não sejam
acessíveis, quando a base for instalada e ligada (fiação de alimentação) em uso normal com a peça
de ajuste, se existir, fusível e porta-fusível em posição. Onde a base tiver partes vivas não protegidas
e previstas para serem cobertas quando instaladas, por blindagem que não faça parte do dispositivofusível, estas partes vivas são consideradas como não-acessíveis.
O grau de proteção deve ser pelo menos IP-2X, quando o fusível está sob condições normais
de serviço. Durante a reposição do fusível, o grau de proteção pode ser temporariamente reduzido a
IP-1X.
Onde um porta-fusível é utilizado, ele deve reter o fusível durante as operações de inserção e
remoção da base.
10.5.6 Prescrições da Nbr 5410 Relativo a Dispositivos Fusíveis
As bases de dispositivos fusíveis em que o porta-fusível é do tipo roscável devem ser ligadas
de maneira que o contato central se encontre do lado da origem da instalação.
As bases de dispositivos fusíveis em que o porta-fusível é do tipo plugue devem ser dispostas
de modo a excluir a possibilidade de se estabelecer, através de um porta-fusível, contatos entre
partes condutoras pertencentes a duas bases vizinhas.
Os dispositivos fusíveis cujos fusíveis sejam susceptíveis de substituição por pessoas que
não sejam nem advertidas (BA4) nem qualificadas (BA5), conforme a tabela 12 NBR 5410, devem ser
de um modelo que atenda às prescrições de segurança da NBR 11840.
Os dispositivos fusíveis ou os dispositivos combinados comportando fusíveis susceptíveis de
serem substituídos apenas por pessoas advertidas (BA4) ou qualificadas (BA5), conforme a tabela 12,
devem ser instalados de tal maneira que os fusíveis possam ser retirados ou colocados sem qualquer
risco de contato fortuito com partes vivas.
148
Fusível NH
Fusível Diazed
Figura 10.17 Tipos de Fusíveis
10.5.7 Corrente nominal do fusível
A corrente nominal do fusível, expressa em amperes, deve ser escolhida entre os seguintes
valores:
2 - 4 - 6 - 8 . 10 - 12 - 16 - 20 - 25 - 32 - 40 - 50 - 63 - 80 - 100 - 125 . 160 - 200 - 250 - 315 400 - 500 - 630 - 800 - 1000 - 1250.
149
10.5.8 Identificações do fusível
As seguintes informações devem ser marcadas em todos os fusíveis, com exceção dos
fusíveis muito pequenos:
•
Nome do fabricante ou marca registrada, pela qual pode ser facilmente identificado;
•
Referência de catálogo ou designação de tipo, suficientemente detalhada para
permitir obter do fabricante todas as características relevantes;
•
Tensão nominal;
•
Corrente nominal (para o tipo gM);
•
Faixa de interrupção e categoria de utilização (código de letra), quando aplicável;
•
Tipo de corrente e, se aplicável, freqüência nominal.
10.5.9 Categoria de utilização
A categoria indica a possibilidade de um fusível de conduzir correntes especificadas sem
danos e ser capaz de interromper as sobrecorrentes em uma faixa específica (faixa de capacidade de
interrupção).
•
Categoria g de utilização
È a categoria dos fusíveis que podem, conduzir continuamente correntes até ao
menos sua corrente nominal e têm a capacidade de interromper correntes desde a
mínima corrente de fusão até a máxima capacidade de interrupção ( faixa completa).
•
Categoria a de utilização.
É a categoria dos fusíveis que podem conduzir continuamente correntes até a sua
corrente nominal e interromper correntes acima de um valor múltiplo especificado da sua
corrente nominal até a sua capacidade nominal de interrupção.
Primeira Letra
•
a Há restrições para atuação em toda a faixa tempo-corrente
•
g Sem restrições de atuação em toda a faixa tempo-corrente
150
Segunda Letra
•
G Proteção de linha, uso Geral
•
M Proteção de circuitos de Motores
•
R Proteção de semicondutores, ultra-Rápidos
•
L Proteção de Linha (DIN VDE)
•
Tr Proteção de Transformadores
10.5.10 Faixa de Interrupção e Capacidade de Interrupção
10.5.10.1 Faixa de interrupção e categoria de utilização
A primeira letra indica a faixa de interrupção:
•
Fusíveis tipo .g. (fusíveis de capacidade de interrupção em toda faixa);
•
Fusíveis tipo .a. (fusíveis de capacidade de interrupção em faixa parcial).
A segunda letra indica a categoria de utilização e define com precisão a característica tempocorrente, tempos e correntes convencionais, e regiões de atuação. Por exemplo:
•
gG: indica fusíveis, com capacidade de interrupção em toda a faixa, para aplicação
geral;
•
gM: indica fusíveis, com capacidade de interrupção em toda a faixa, para proteção de
circuitos de motores;
•
aM: indica fusíveis, com capacidade de interrupção em faixa parcial para proteção de
circuitos de motores.
Observação:
Atualmente os fusíveis gG são freqüentemente usados para proteção de circuitos de motores,
o que é possível quando suas características são adequadas para suportar a corrente de partida de
motor; O fusível gM é caracterizado por dois valores de corrente. O primeiro valor In representa a
corrente nominal do fusível e do porta-fusível; o segundo valor Ich é dado pela característica tempocorrente do fusível definido pelas regiões de atuação. Estes dois valores são separados por uma letra,
a qual define as aplicações. Por exemplo:
151
- In M Ich indica um fusível de característica G, designado a ser usado para proteção de
circuitos de motores. O primeiro valor In corresponde à máxima corrente permanente para o
dispositivo-fusível e o segundo valor Ich corresponde à característica G do fusível.
Um fusível aM é caracterizado por um valor de corrente In e pela característica tempocorrente.
10.5.11 - Tipos de Fusíveis
10.5.11.1 Fusíveis NH
Na Europa foram desenvolvidos os fusíveis denominados NH (abreviação de baixa tensão
niederspanungs e alta potência Hochleitungs) com contato tipo lâmina para encaixar. Para retirada
dos fusíveis com circuito energizado foi desenvolvida um punho isolante destacável. Os NH podem
ser montados como lâminas (facas) de seccionador constituindo uma chave fusível eliminando a
necessidade de uma chave seccionadora em serie com uma base de fusíveis, diminuindo assim o
espaço ocupado. Os fusíveis NH são fabricados para correntes nominais de até 1250 A para circuitos
em CA até 500V e em CC até 250V. Com alguma restrição para algumas correntes são fabricados até
660V. Os fusíveis NH têm indicador de operação que é constituído por um fio fino em paralelo com o
elo fusível e a indicação é feita por um pistão ou uma bandeira. A corrente é praticamente toda
conduzida pelo elo fusível de modo que após o rompimento deste a corrente passa a ser conduzida
pelo fio que romperá em um intervalo de tempo desprezível após a interrupção do elo.
Figura 10.18 Fusíveis Tipo NH
152
10.5.11.2 Fusível tipo D
É um dos mais antigos fusíveis e é denominado Diazed e em alguns países simplesmente
Zed ou ainda Garrafa. A designação oficial a ser usada é tipo D (derivado de Diazed). O contato é
feito pelas pontas e isto limita a corrente nominal a 63 A (estendida posteriormente a 100 A) e até 500
Vac. A limitação é pela dificuldade de contato pelas extremidades e não de projeto do elo fusível. Já
chegou a ser produzido até 200 A mas esses projetos acima de 100 A foram abandonados. O elo
fusível é em prata ou cobre prateado e é enchido com quartzo granulado.
Categoria de utilização: gG
Capacidade de interrupção: 70 kA até 500 VCA (até 20 A: 100 kA; de 80 A e 100 A: 50 kA)
100 kA até 220 Vdc.
Estes fusíveis têm também um indicador de operação que libera um botão visível
externamente por uma tampa transparente. O corpo é também de esteatita. O corpo é alojado em
uma base e com uma tampa roscada; é provido de anéis de modo a impedir a substituição de uma
unidade danificada por outra de maior capacidade.
Figura 10.19 Fusíveis Diazed
153
10.5.11.3 Fusíveis (miniatura) NEOZED
São similares aos Diazed, porém de tamanho reduzido. São fabricados até 63 A, 400Vca e
250 Vcc. Capacidades de interrupção: 50 kA até 400 V ca; 8 kA até 250 V cc.
Categoria de utilização: gG
Podem também ser montados como chaves seccionadoras-fusível.
Figura 10.20 Fusíveis (miniatura) NEOZED
Figura 10.21 Simbologia Seccionador – Fusível Sob Carga
Figura 10.22 Simbologia Fusível
154
10.5.12 Curvas Característica de Fusíveis quanto a Limitação de
Corrente e Quanto ao Tempo de Fusão ou Rompimento Virtual
Figura 10.23 Curvas de Limitação
Figura 10.24 Curvas Tempo x Corrente
155
XI - PROTEÇÃO CONTRA CHOQUE NA
NBR 5410
A proteção contra choque que visa impedir que uma pessoa ou animal doméstico estabeleça
contato involuntário com alguma parte da instalação elétrica que esteja em potencial que seja
perigoso para a sua integridade física, este potencial pode ser originado tanto de uma parte da
instalação que está energizada para o seu funcionamento normal, quanto de uma parte que foi
acidentalmente energizada. Uma instalação elétrica tem que ser segura, ter a devida proteção tanto
em situação de funcionamento normal quanto em uma situação de falta.
A proteção contra choques deve considerar os seguintes elementos da instalação elétrica
partes vivas, massas e elementos condutores estranhos à instalação. A proteção contra choque que
visa impedir o acesso às partes vivas da instalação é chamada de proteção contra choque por contato
direto. A proteção que visa impedir o choque elétrico a partir de parte condutora da instalação que
normalmente não esta energizada, mas que se tornou energizada com um potencial perigoso
normalmente devido a um defeito na isolação básica de um componente é conhecida como proteção
contra choque por contato indireto.
A base técnica para as prescrições de proteção contra choque nas normas brasileiras é o
relatório IEC 479-1 que trata dos efeitos do choque elétrico no corpo humano. Portanto realizar a
proteção contra choques, no âmbito das normas baseadas nesta filosofia, é manter as partes
acessíveis das instalações dentro dos limites estabelecidos pela IEC 479-1. A proteção contra
choques, portanto, independe do valor da tensão nominal da instalação, dependendo somente da
suportabilidade do corpo humano ao choque.
Figura 11.1 Tipos de contato
156
Figura 11.2 Efeito fisiológico da corrente no corpo humano.
11.1 O Socorro às Vítimas
•
Respiração assistida
O método boca-a-boca é o mais eficiente.
•
Perfuração da traquéia
Quando não se consegue desenrolar a língua a traquéia deve ser perfurada para
permitir a respiração sem uso da boca ou nariz.
•
Massagem cardíaca
Pressão ritimada sobre o tórax, combinada com respiração assistida pode manter a
circulação sangüínea (irrigando o cérebro) enquanto não chega socorro médico.
•
Desfibrilação
Um aparelho denominado desfibrilador gera pulsos de corrente (produzidos por um
capacitor) que são aplicados por dois eletrodos colocado no tórax de modo que parte
desses pulsos passem pelo coração. Podem ser feitas várias tentativas com valores
crescentes dos pulsos, combinados com massagem cardíaca.
•
As queimaduras
São tratadas em clínicas especializadas, mas quando a extensão é muito grande
geralmente resultam namorte da vítima. As queimaduras mais graves são as
provocadas pelo arco elétrico, pela alta temperatura (alguns milhares deºC.)
157
11.2 - Dispositivos DR
11.2.1 Proteção complementar contra contatos diretos:
• Circuitos que sirvam a pontos situados em locais contendo banheira / chuveiro (exceto
circuitos que
alimentem pontos de luz com h > 2,5m);
• Circuitos que alimentem tomadas de corrente em áreas externas;
• Circuitos de tomadas de corrente em áreas internas que possam alimentar equipamentos no
exterior;
• Circuitos de tomadas de corrente de cozinhas, copas-cozinhas, lavanderias, áreas de
serviço, garagens e, no geral, a todo local interno molhado em uso normal ou sujeito a lavagens
(podem ser excluídas as tomadas destinadas a alimentar refrigeradores e congeladores, desde que
não diretamente acessíveis).
11.2.2 Função Dispositivos DR
• Protegem pessoas contra os efeitos nocivos causados por choques elétricos, por detecção
da corrente de fuga e desligamento imediato;
• Protegem também instalações contra falhas de isolação, evitando perdas de energia e
possíveis focos de incêndio;
• Faixas de corrente de 25, 40, 63 e 125A para correntes de fuga de 30 e 500mA em
220/380VCA;
• Compatíveis com a exigência da norma NBR 5410/1997;
• Fixação rápida por engate sobre trilho;
• Acessórios: Contatos auxiliares 1NA + 1NF (dependendo do fabricante)
• Atendem ao Sistema N - modular standard.
158
Figura 11.3 Dispositivos DR
Dispositivo DR - Dispositivo que interrompe a corrente de carga quando a corrente diferencial
residual atinge um determinado valor.
Corrente Diferencial Residual - é a soma algébrica dos valores instantâneos das correntes
que percorrem todos os condutores vivos de um circuito em um dado ponto.
Figura 11.4 Corrente diferencial-residual
11.2.3 Princípio de Funcionamento
A corrente diferencial residual de um circuito sem defeito de isolamento seja na carga
seja nos condutores, é zero. Este valor é ideal, pois por imperfeição dos materiais isolantes de que
são usados na fabricação dos condutores e das isolações básicas das cargas existe uma pequena
corrente diferencial residual natural.
O dispositivo DR é um componente da instalação que secciona a alimentação da carga ou
circuito quando a corrente diferencial residual ultrapassa um determinado valor. Para que o DR
159
cumpra esta função o dispositivo é construído de tal forma que todos os condutores vivos do circuito
passe por dentro de um toroide no interior deste dispositivo. Cada condutor induz um fluxo magnético
no toróide com uma intensidade proporcional à intensidade da corrente e sentido proporcional ao
sentido da corrente.
Pode-se facilmente concluir que o fluxo resultante no toróide é proporcional à corrente
diferencial residual do circuito. O dispositivo DR usa este fluxo, através de um sistema de detecção,
para comandar um dispositivo de interrupção que secciona a alimentação do circuito.
Como em um circuito sem falta a corrente diferencial residual é muito baixa praticamente nula
o dispositivo não atua quando no circuito aparece uma falta, a corrente diferencial assume um valor
alto e conseqüentemente o fluxo magnético também aumenta, o sistema de detecção envia um
comando para o dispositivo de interrupção que isola a parte com defeito.
Figura 11.5 Corrente de Fuga ocasionado por Falha de Isolação do Equipamento – Contato Indireto
Figura 11.6 Princípio de Funcionamento dos DR’s
160
O DR pode ser encontrado em duas formas diferentes de implementação. Quando o sistema
de detecção, incluindo o toróide, e o sistema de interrupção encontram-se presentes no mesmo
equipamento é denominado dispositivo DR.
Quando o sistema de detecção, incluindo o toróide, e o sistema de interrupção encontram-se
em equipamentos distintos, o sistema de interrupção da corrente usado normalmente é o disjuntor e o
DR é um módulo que se acopla a este disjuntor. A primeira opção é usada nas instalações prediais e
a segunda nas instalações industriais.
11.2.4 Tipos de DR’s
AC - Apenas corrente alternada;
A - Corrente alternada e pulsante;
B - Alternada, pulsante e CC pura.
Os Dispositivos DR ou Disjuntores DR de corrente nominal residual (I∆n ) até 30 mA, são
destinados a proteção de pessoas, e, acima deste valor, são apropriados a proteção de instalações
elétricas. Dispositivos DR ou Disjuntores DR do tipo AC são aplicados em circuitos de corrente
alternada, sendo resistentes à sobretensões transitórias. São normalmente utilizados em instalações
elétricas prediais, como também em instalações elétricas industriais de características similares. Os
do tipo A (antigo B) são aplicados em circuitos de corrente alternada e contínua pulsante, sendo
fortemente resistentes às acentuadas sobretensões transitórias típicas das grandes instalações
elétricas industriais. Dispositivos DR de corrente nominal residual (I∆n) de 10 mA, são utilizados em
circunstâncias especiais, como, por exemplo, para proteção de pessoas que sofreram intervenções
cirúrgicas delicadas,como a correção de distúrbios cardíacos. Para projetos típicos com circuitos de
entrada e de distribuição, podem ser utilizados os Dispositivos DR que atuam de forma seletiva, o que
permite que seja desligada somente a parte da instalação que apresente falha.
Dispositivo DR seletivo de característica S, tem um retardo de disparo conforme prescrito pela
norma IEC 1008. Para uma corrente nominal residual de 30 mA, o Dispositivo DR seletivo de
característica K, tem seu disparo retardado em 10 ms acima dos valores normais de atuação, o que
permite uma seletividade fina e adequada à proteção de pessoas.
Os Disjuntores DR, além da proteção contra correntes de fuga à terra, protegem as
instalações elétricas das correntes de sobrecarga e curto-circuito. São aplicados Dispositivos DR ou
Disjuntores DR normalmente nas configurações de rede TN-S (Fase/PE) e TT (Fase/N/PE).
Dispositivos DR obedecem a norma IEC 1008 e os Disjuntores DR a IEC 1009.
161
11.2.5 Módulo DR
O módulo DR é um componente da instalação que detecta a corrente diferencial residual e
comanda a interrupção no disjuntor. Esta opção é dada sempre em disjuntores industriais, que
seguem a norma NBR 60947-2. A interrupção ocorre no disjuntor, logo a capacidade de interrupção
do conjunto é definido pela capacidade de interrupção do disjuntor.
O módulo DR (Diferencial-Residual) foi concebido para ser montado posteriormente no
disjuntor pelo cliente. A combinação de disjuntor alguns modelos de disjuntores e módulo DR pode
ser alimentada tanto pelo lado superior como pelo inferior.
Alguns disjuntores com módulo DR podem ser fornecidos com blocos de contatos auxiliares e
de alarme, bobina de mínima tensão e bobina de desligamento à distância, sendo sua montagem
dependente dos acessórios já existentes no disjuntor. O módulo DR detecta a presença de correntes
diferenciais / residuais dentro dos sistemas de distribuição.
11.2.4 Aplicação
Proteção de pessoas em redes TT, IT e TN (ajuste I_n = 30mA, td instantâneo). Proteção de
instalações e equipamentos contra sobrecarga ou contra danos causados por faltas à terra (proteção
de falta à terra). O módulo DR se vale de uma soma vetorial de todas as correntes de fase, acionando
o trip do disjuntor quando a corrente de falta à terra ultrapassa os valores ajustados de corrente de
atuação e de tempo de retardo.
11.2.5 Principais Características para Selecionar DR
In (A)
I∆n (mA ou A)
Un (V)
Iint (A ou kA)
f (Hz)
Nº pólos
162
•
Dispositivos DR’s Tipo AC
Bipolares - Sensibilidade 30 e 300 mA " 25A, 40A, 63A e 80A;
Tetrapolares - Sensibildade 30, 300 mA " 25A;
Tetrapolares - Sensibilidade 30, 300 e 500 mA " 40A, 63A, 80A, 125A e 125A
(selet. S);
Acessórios dependendo do fabricante (Tipo AC / A) " Contato auxiliar 1NA + 1NF;
•
Dispositivos DR . Tipo A
Bipolares - Sensibilidade 10 mA " 16A;
Tetrapolares - Sensibilidade 30 mA " 40A (selet. K), 40A, 63A, 80A e 125A;
- Sensibilidade 300 mA " 63A (selet. S), 160A;
- Sensibilidade 500 mA " 63A, 125A, 160A, 224A;
11.3 Interruptor Diferencial
É um dispositivo de interrupção de corrente de carga e que incorpora um DR. Este dispositivo
precisa ter a montante um DPCC ; disjuntor ou fusível.
Figura 11.7 Interruptor Diferencial
163
11.4 Disjuntor Diferencial Seletivo
Para poder coordenar com outros dispositivos a corrente residual de disjuntores DRs em série
em um circuito, estes dispositivos dispõem de um retardo curto de tempo.
Figura 11.8 Disjuntor Diferencial Seletivo
164
11.5 Ligação dos Dispositivos de Proteção por
Corrente Residual
Figura 11.9 Como Ligar no Esquema TN
Figura 11.10 Como Ligar no Esquema TT
165
11.6 Botão de Teste
Obrigatório por norma; Verificação periódica do funcionamento.
Figura 11.11 Funcionamento de um Botão de Teste de um DDR
166
11.7 Montagem dos Dispositivos DR’s em Quadros
de Distribuição
Montagem de um DR na entrada
Montagem de dois DRs por setor
Figura 11.12 Quadro Metálico
Montagem de dois DR.s por setor
Figura 11.13 Quadro Plástico
167
XII - ESPECIFICAÇÕES E DADOS DE
ENCOMENDA DE COMPONENTES E
DISPOSITIVOS
Ao adquirir um equipamento / componente / dispositivo, sempre nos defrontamos com o que
precisamos conhecer para adquirir corretamente? Dentro do objetivo de colocar na mão dos
profissionais, dados práticos concretos, relacionamos a seguir, dentro do escopo desse texto, os
dados necessários, caso a caso, relacionando inicialmente os dados sempre necessários.
•
Dados gerais ( sempre definidos )
Temperatura no local da instalação ............................................................... ____ oC
Fator de correção aplicável por temperaturas superiores .............................. 0, ..
Altitude no local da instalação......................................................................... ____ m
Fator de correção por altitudes superiores ..................................................... 0, ..
Instalação ao ar livre ou protegido................................................................... tempo / abrigada
Umidade no local ............................................................................................ ____ %
Componentes agressivos no local da instalação............................................ ________
Grau de proteção devido as condições anteriores ......................................... IP ___
Necessidade de pintura especial devido as condições anteriores.................. ________
Valor calculado da corrente de curto-circuito presumida ............................... ____ kA
Tipo de carga ............................................................................................. resistiva/capacitiva /indutiva
Posição de montagem (qualquer / horizontal / vertical / inclinadas) ............. ________
Dimensões (desenhos com dimensões) ou (largura/altura/profundidade)................................... __ mm
Peso .............................................................................................................. ____ kg
•
Dados Específicos
Disjuntores
Tensão nominal máxima ......................................................................... ____ V
Corrente máxima de interrupção Icu ou Ics / Tensão de rede ................ ____ kA / ____ V
Corrente nominal máxima / Temperatura ambiente ................................ ____ A / ____ oC
Número de pólos ..................................................................................... ____ pólos
Relé disparador de sobrecarga ............................ não _, sim _ fixo _ ajustável ____ a ____ A
Relé disparador de curto-circuito ......................... não _, sim _ fixo _ ajustável ____ a ____ A
168
Seccionador
Tensão nominal máxima ...................................................................... ____ V
Corrente nominal / Categoria de emprego ........................................... ____ A AC-___ ou DC-___
Proteção de curto-circuito - fusível ( tipo / corrente nominal ) ................. Tipo____ / ____ A
Fusível
Tensão nominal máxima ......................................................................... ____ V
Corrente máxima de interrupção / Tensão de rede ................................. ____ kA / ____ V
Corrente nominal / Tamanho ................................................................... ____ A tamanho ____
Contator de potência
Tensão nominal máxima ......................................................................... ____ V
Corrente nominal / Categoria de emprego .............................................. ____ A AC-___ ou DC-___
Tensão de comando / Freqüência .......................................................... ____ V / ____Hz
Contatos auxiliares ( Quantidades / Execução ) ..................................... ____ NA + ___NF
Relé de sobrecarga
Tensão nominal máxima ......................................................................... ____ V
Faixa de ajuste ........................................................................................ ____ a ____ A
Contatos auxiliares ( Quantidades / Execução ) ..................................... ____ NA + ___NF
Contator auxiliar
Tensão nominal máxima ......................................................................... ____ V
Corrente nominal / Categoria de emprego .............................................. ____ A AC-___ ou DC-___
Tensão de comando / Freqüência .......................................................... ____ V / ____Hz
Contatos auxiliares ( Quantidades / Execução ) ..................................... ____ NA + ___NF
169
XIII - DIAGRAMAS ELÉTRICOS
APLICADOS A CHAVES DE PARTIDA
Os esquemas e diagramas das instalações elétricas industrais são representados a partir das
conexões elétricas feitas através de condutores - fios, cabos ou barramentos -, entre os dispositivos e
equipamentos utilizados para manobra, comando, proteção, sinalização, seccionamento, e demais
dispositivos.
Todos dispositivos são desenhados, segundo a simbologia normatizada, no seu estado
natural desenergizado, ou, no caso de dispositivos de atuação sob ação de esforço mecânico, como,
botoeiras e seccionadores manuais, no seu estado natural sem a ação do esforço mecânico.
No caso de diagramas elétricos de uma subestação, QGBT ou de um CCM, o esquema
unifilar simplifica dispositivos ou equipamentos elétricos de múltiplos pólos, que possuam
comportamento semelhantes ou iguais sob ação de energização, como no caso dos contatos de um
contator quando energizado a bobina do mesmo.
Nesses caso é bastante usual indicar o sentido da corrente elétrica pelos dispositivos elétricos
como também o valor da corrente que circula pelos mesmos.
A seguir estão representados no modo multifilar e no modo unifilar, o esquema de força uma
chave de partida direta. O esquema de comando sempre é representado na forma multifilar.
170
Multifilar
Unifilar
Figura 13.1 Esquema de força da chave de partida direta no modo multifilar e no modo unifilar
Sendo:
Q1 + k1: Q1 = disjuntor – motor, com função de proteção contra curto-circuito e sobrecarga,
com contato auxiliar NF (95-96) para comando; k1 = contator de força com função de estabelecer e
interromper a alimentação do motor.
Q1 + k1 + FT1: Q1 = disjuntor – motor, com função de proteção contra curto-circuito e
sobrecarga, sem contato auxiliar NF (95-96) para comando; k1 = contator de força com função de
estabelecer e interromper a alimentação do motor; FT1 = relé de sobrecarga bimetálico com função
de proteção contra sobrecargas, através da inserção de seu contato auxiliar para comando NF (95-96)
no esquema de comando.
171
Figura 13.2 Esquema de comando da chave de partida direta respectivamente aos esquemas de força acima
Sendo:
L1 e L2: alimentação do comando conforme tensão de bobina do contator. Normalmente a
bobina do contator é fabricada para: 380, 220 ou 110 Vac, ou 48, 24 ou 12 Vdc; por isso a
necessidade ora do uso do F22.
F21 e F22: fusíveis, ou disjuntor mono ou bipolar, para proteção do circuito do comando,
sendo F22 de uso obrigatório quando o circuito de comando alimentado entre fases, ou entre positivo
e negativo.
NF de Q1 ou NF de FT1 (95-96): contato auxiliar dos dispositivos de proteção com função de
proteção do motor indiretamente com a abertura do circuito alimentador da bobina do contator.
SE + S0 + S1: SE = botão tipo soco para emergência, com trava; S0 = botão pulsador com
função de DESLIGA; S1 = botão pulsador com função de LIGA.
172
XIV - CHAVE DE TRANSFERÊNCIA
GERADOR CONCESSIONÁRIA
As chaves de transferência, ou, dispositivos de intertravamento mútuo, são usados quando da
impossibilidade técnica normativa ou, da lógica de funcionamento, de dois ou mais dispositivos
distintos poderem estar ambos fechados ou acionados. Este processo de intertravamento é indicado,
segundo a NBR 5410, quando do uso de gerador elétrico por algum tipo de unidade consumidora,
particular única ou múltipla, que consuma energia a partir de uma rede de alimentação não particular,
ou seja, de uma concessionária de energia elétrica. Normalmente o gerador de uso particular é usado
para entrar nos horário de ponta (valor do KWh maior, quando unidade possui multimedição ou
medição em alta), ou, em situações de fornecer energia elétrica para unidade consumidora quando
essa não está disponível por parte da concessionária. Os itens abaixo se referem a normativa usada
pelas principais concessionárias de energia elétrica no Brasil a respeito da Instalação de Geradores
Particulares em Baixa Tensão.
14.1 Normativa sobre Instalação de Geradores
Particulares em Baixa Tensão
14.1.1 Objetivo
Estabelecer critérios, subsídios e procedimentos técnicos para nortear e aprovar os projetos
de instalação de grupos geradores particulares em baixa tensão.
14.1.2 Responsabilidades
Compete aos órgãos comercial, atendimento, operacional, manutenção, expansão e de
serviços de redes das empresas concessionárias seguirem o estabelecido nesta norma e utilizarem
os critérios aqui definidos para orientação aos consumidores interessados em instalar grupo gerador
nas unidades consumidoras.
173
14.1.3 Conceituação
•
Gerador Elétrico
Equipamento utilizado para transformar energia de origem mecânica em energia elétrica.
•
Intertravamento
Conexão mecânica, elétrica, eletromecânica ou eletrônica que relaciona dois mecanismos,
tornando-os interdependentes, ou seja, a liberação da operação de um mecanismo depende de
condições predeterminadas de outro e vice-versa. Aplicam-se as operações de chaves de
manobras dos sistemas elétricos, onde a possibilidade do fechamento de uma está condicionada
a condição prévia da abertura de outra chave e vice-versa. Não atendida esta condição o sistema
trava, impedindo a operação e, evitando-se manobras indesejáveis.
14.1.4 Disposições Gerais
Para instalação de um gerador particular, em unidades consumidoras atendidas pelo sistema
das empresas concessionárias, deve ser apresentado projeto para análise das mesmas;
Não é permitido o paralelismo entre os geradores e o sistema elétrico das empresas
concessionárias;
Quando um gerador suprir os mesmos circuitos alimentados em regime normal pelas
empresas concessionárias é exigido uma chave com intertravamento mecânico e elétrico visível, ou
seja, o seccionamento que separa o sistema elétrico das concessionárias e do gerador deve ser de
fácil visualização, capaz de, em qualquer situação, evitar o paralelismo do gerador com o sistema
elétrico das empresas concessionárias;
Quando um gerador suprir instalações que representem aumento de carga de uma unidade
consumidora, a alimentação deste circuito pelas instalações das empresas concessionárias só é
possível com a solicitação de ampliação de carga feita pelo consumidor e a análise da viabilidade de
atendimento pelas empresas concessionárias;
A energia elétrica fornecida pelo gerador não pode causar nenhuma interferência na medição
das empresas concessionárias;
É do consumidor em cuja unidade for instalado o gerador, a responsabilidade total por
qualquer problema operacional que venha ocorrer e que possa ocasionar danos a pessoas, bens e ao
sistema elétrico das empresas concessionárias;
As instalações elétricas do circuito do gerador deve ser independente e feita em tubulação
exclusiva e não é permitido violar o sistema de selos das empresas concessionárias para realizar a
sua conexão;
174
Não é permitido o emprego exclusivo de intertravamento elétrico ou eletrônico;
O projeto de instalação do gerador deve ser apresentado em 03 (três) vias, para análise e
cadastramento pelas empresas concessionárias, contendo no mínimo:
Uma via da ART de Projeto e Construção – Anotação de Responsabilidade Técnica, emitida
pelo CREA;
Dados do gerador, diagramas unifilar e multifilar elétrico, contendo detalhes do
intertravamento, da proteção e do sistema de aterramento;
Antes da colocação em serviço do gerador, deve ser feita inspeção pelas empresas
concessionárias, a fim de verificar se a obra foi executada de acordo com o projeto e solicitado aos
órgãos de operação o cadastramento da unidade como possuidora de gerador elétrico;
14.2 Diagramas Unifilares Simplificados.
Mostrando o Esquema para Ligação de Geradores para Uso em Unidades Consumidora
Individual e Coletiva
Figura 14.1 Intertravamento Rede Concessionária / Gerador Particular para Unidade Consumidora Individual
Onde:
CGR – Dispositivo de intertravamento lado do gerador;
CRD – Dispositivode intertravamento lado da rede da empresa concessionária.
175
Mostrando o Esquema para Ligação de Geradores para Uso em Unidades Consumidora
Individual e Coletiva
Figura 14.2 Intertravamento Rede Concessionária / Gerador Particular para Unidade Consumidora Coletiva
Onde:
CDG – Quadro geral de disjuntores
CGR – Dispositivo de intertravamento lado do gerador;
CRD – Dispositivo de intertravamento lado da rede da empresa concessionária.
176
BIBLIOGRAFIA
Siemens Switching, Protection and Distribuition in Low-Voltage ,Networks Publics MCD, 2ª Edição, 1994.
Willian D. Stevenson, Elementos de Análise de Sistemas de Potência,Ed. Mc Graw Hill do Brasil, 1975.
Ernesto João Robba, Introdução à Análise de Sistemas de Potência, Editora da USP/ Editora Edgard Bluecher,
1975
SCHMELCHEN, Theodor. Manual de Baixa tensão: informações técnicas Parra aplicação de dispositivos de
manobra, comando e proteção. 1ª edição
Siemens S.A. Nobel, São Paulo, 1988.
DAWES, Chester L. Curso de Eletrotécnica. 13ª edição. Editora Globo. Porto Alegre, 1976.
WEG, Acionamentos. Informações Técnicas. Comando e proteção para motores Elétricos. Jaraguá do Sul, 1990.
A. Capelli. Eletrônica para Automação. Antenna Edições Técnicas, Rio de Janeiro, 2004.
Automação Industrial Editora: Érica Autor: Ferdinado Natale;
Automação Aplicada Editora: Érica Autor: Marcelo Georgini
Cadernos Técnicos da Siemens do Brasil;
Cadernos Técnicos da Allen-Bradley;
Cadernos Técnicos da WEG do Brasil;
Cadernos Técnicos da Schneider – Electric do Brasil;
177