Revista Brasileira de Ensino de Fsica vol. 20, no. 4, Dezembro, 1998
413
Aquisic~ao de Dados e Aplicac~oes Simples
Usando a Porta Paralela do Micro PC
(Data acquisition and applications employing the parallel port of a PC)
D. F. de Sousa, J. Sartori, M. J. V. Bell e L. A. O. Nunes
Departamento de Fsica e Informatica,
Instituto de Fsica de S~ao Carlos
Caixa Postal 369, 13560-970, S~ao Carlos, S.P., Brasil
E-mail: [email protected]
Recebido 3 de novembro, 1997
This work reports on the use of the parallel printer port of a PC that can be used for data
acquisition of experiments in under-graduate physics (or chemistry). A homemade card
connected to the parallel printer port of a PC acts as a digitizer employing an 8-bit analogdigital converter (ADC) with eight multiplexed inputs. This card has multiple uses and can
be used either as a (x, y) or (x, t)] recorder or as a digital oscilloscope.
Apresentamos neste trabalho uma maneira de transformar a porta paralela de um micro PC
em um digitalizador de baixo custo para a aquisic~ao de dados em experimentos de fsica (ou
qumica). Atraves de uma interface de facil montagem, a porta paralela de um micro PC
passa a atuar como um digitalizador de ate oito canais. Este pode ser utilizado como um
registrador (x y) ou (x t)] ou ate mesmo como um osciloscopio digital.
Introduc~ao
O fato de que os microcomputadores atuais processam apenas sinais sob a forma digital, constitui um
dos maiores empecilhos quanto a aquisica~o de dados
atraves da utilizac~ao de um microcomputador, pois
a maioria dos transdutores como termopares, cristais
piezoeletricos, LDR's e potenci^ometros, por exemplo, os
quais s~ao elementos que atuam como sensores de temperatura, press~ao, intensidade luminosa e de posic~ao
espacial, respectivamente, atuam de forma analogica.
Para que a informac~ao advinda de um destes elementos
seja processada pelo microcomputador, e necessario que
seja feita a transformac~ao do sinal da forma analogica
para a forma digital.
Neste sentido, n~ao raras s~ao as propostas para a
utilizac~ao de interfaces (em comunicac~ao paralela) dedicadas ao controle de processos e aquisic~ao de dados.
1-3] N~ao raras, tambem, s~ao as opc~oes no mercado atual de interfaces dedicadas ao proposito de aquisic~ao
e controle de processos (placas do tipo, IEEE Bus, e
GPIB, etc.). Nem sempre, no entanto, justica-se o em-
prego destas interfaces sob os aspectos tanto econ^omico
quanto pratico.
Tendo em vista a utilizac~ao de microcomputadores
em experimentos de fsica e de qumica em laboratorios
de ensino, insere-se o presente trabalho. Utilizando-se
de um circuito eletr^onico simples, a porta paralela de
um microcomputador (usualmente empregada para comunicac~ao com as impressoras) transforma-se num digitalizador de sinais provenientes dos mais diversos tipos
de transdutores. Por meio da interface proposta, os
sinais analogicos (entre 0 e 5 Volts) s~ao convertidos em
\palavras" digitais de 8-bits, tornando possvel, deste
modo, a aquisic~ao de sinais de uma maneira simples
e conveniente. Como exemplo de aplicac~ao da interface proposta neste trabalho, descrevemos experimentos simples tais como: Curva caracterstica de Tens~ao e
Corrente em dispositivos, e o estudo do Coeciente de
Amortecimento no movimento oscilatorio.
Interface de Convers~ao
A convers~ao de sinais analogicos em seus correspondentes digitais a caracterizada pela velocidade e pre-
414
D.F. de Sousa et al.
cis~ao com que estas equival^encias s~ao estabelecidas.
Para tal, existem tecnicas e algoritmos de convers~ao
bem conhecidos.
4] Como exemplo, podemos citar a
convers~ao de sinais sob a forma de escada, a integrac~ao
de dupla rampa e a convers~ao em aproximac~oes sucessivas. A tecnica de aproximac~oes sucessivas apresenta
a vantagem de poder operar com grande rapidez, uma
vez que uma sucess~ao de tens~oes ponderadas e comparada com o sinal de entrada. Cada nvel de tens~ao
sucessivo e armazenado sempre que menor que o sinal
de entrada, ou rejeitado quando maior. O processo e
repetido dgito por dgito ate que a precis~ao desejada
seja obtida. A velocidade do processo de convers~ao por
aproximac~oes sucessivas e limitada apenas pelos retardos de propagac~ao nos circuitos, sendo o conversor capaz de executar milhares de convers~oes por segundo.
O conversor analogico-digital utilizado no presente
trabalho foi o ADC0808 desenvolvido com tecnologia
CMOS1 , pela National Semiconductor.
5] Este conversor esta baseado na tecnica de convers~ao em aproximac~oes sucessivas com resoluc~ao de 8-bits e tempo
medio de convers~ao de 100s. Disp~oe ainda, de oito
entradas multiplexadas (CANAIS). Estas entradas podem ser acessadas individualmente atraves de 3-bits de
enderecamento (A0, A1 e A2). Para que a convers~ao
tenha inicio, necessitamos enviar um sinal de partida
(start), e uma vez terminado o processo de convers~ao, o
circuito (ADC0808) envia um sinal de m de convers~ao
(end-of- conversion). Apos este sinal, o correspondente
valor digital referente a entrada analogica selecionada
estara disponvel nos 8-bits de sada (D0-D7).
O ADC0808 necessita ainda de uma base de tempo
externa (clock), uma tens~ao de alimentac~ao de 5 Volts
(VCC) e uma tens~ao de refer^encia (REF+5V). Na
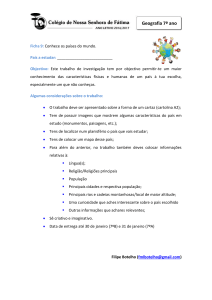
Figura 1 mostramos o diagrama eletrico do modulo conversor e sua conex~ao a porta de comunicac~ao paralela
do microcomputador. Podemos obter o clock externo
atraves da utilizac~ao de tr^es portas de um chip 7404
(NO) conectadas sob a congurac~ao de um oscilador
monoestavel com frequ^encia de aproximadamente 640
kHz. Para simplicarmos ainda mais o software de controle, conectamos outras duas portas do 7404 aos pinos
25 (A0) e 23 (A2) do ADC0808. A ultima porta do 7404
foi conectada ao pino 6 (start), que se encarrega do recebimento do sinal de incio de convers~ao. A utilizac~ao
das referidas portas inversoras levou em conta o fato
de que alguns bits da Porta Paralela do microcomputa1 CMOS,
da l
ngua inglesa,
dor possuem logica negativa. 1] A m de proporcionar
mais corrente ao sinal, o acoplamento entre os dois dispositivos (conversor-micro), e feito atraves de dois chips
7407.
E importante salientar que estamos empregando
a Porta paralela para gerar as palavras de controle
necessarias para o funcionamento do conversor AD e
tambem para o recebimento de dados provenientes do
mesmo. Em alguns microcomputadores, no entanto,
este uxo de dados bidirecional precisa ser ativado por
meio de um jump existente na placa de Porta paralela
do microcomputador ou em alguns casos (micros IBM,
por exemplo) a congurac~ao deste modo de operac~ao
deve ser feita atraves da BIOS do microcomputador.
As informac~oes necessarias para congurar a Porta Paralela de cada micro em particular, s~ao obtidas atraves
do manual do fabricante da placa. Em nosso projeto,
utilizamos a placa MULTI I/O PLUS IDE HM83741.
Controle do Conversor
Os sinais de controle necessarios para o funcionamento do conversor e a coleta de dados advinda do
mesmo s~ao realizadas via software. No presente caso, a
linguagem empregada foi o Q-Basic. No entanto, outras linguagens podem ser utilizadas, como por exemplo,
Turbo Pascal, Turbo C, linguagem de maquina, etc.
Em Q-Basic a estrutura basica do software de controle
e coleta de dados possui a seguinte forma:
Atraves das variaveis PortaA, Porta8 e Porta9 denimos inicialmente os enderecos da porta paralela. Se seu
computador estiver usando a sada LPT2, os enderecos
s~ao: PortaA= &H37A, Porta8= &H378 e Porta9=
&H379.
(Conducting Metal-Oxide Semiconductor.)
Revista Brasileira de Ensino de Fsica vol. 20, no. 4, Dezembro, 1998
415
Figura 1. Diagrama eletrico do modulo conversor.
O proximo passo e denir-mos a variavel CANAL
(INPUT CANAL). Os codigos responsaveis pela selec~ao
da entrada analogica e pelo sinal de incio de convers~ao
(start), s~ao gerados atraves das tr^es instruc~oes \OUT"
subsequentes: a primeira, seleciona a entrada analogica
desejada e as outras duas geram o sinal de incio de convers~ao. A express~ao Z = 2 CANAL e usada para simplicar a obtenca~o dos sinais de controle. Apos o sinal
de incio de convers~ao o programa entra em um loop de
leitura e teste, para detectar o sinal de m de convers~ao,
isto e realizado pela instruc~ao \IF". Quando o sinal de
m de convers~ao for reconhecido, o microcomputador
ira coletar atraves da instruc~ao INP(Porta8), o equivalente digital referente a tens~ao aplicada na entrada do
canal selecionado. Apos isto o mesmo sera transformado para Volts atraves da instruc~ao subsequente.
Aplicaco~es
A interface descrita neste trabalho e de proposito
geral e tem inumeras possibilidades de utilizac~ao. Iremos expor em detalhes duas experi^encias comuns em
laboratorio de ensino de fsica, as quais podem ser enriquecidas atraves da utilizaca~o de nossa interface.
Lei de Ohm
A primeira delas refere-se a vericac~ao e analise da
Lei de Ohm.
6] Sabemos que a corrente que ui num cir-
416
D.F. de Sousa et al.
cuito eletrico e diretamente proporcional a tens~ao aplicada e inversamente proporcional a resist^encia oferecida
pelos elementos do circuito a passagem da corrente (I
= V / R) A unidade de resist^encia eletrica no SI e o
" (Ohm). A resist^encia num o e dada por R = `=A
onde ` e o comprimento do o, A e a area de sua sec~ao
transversal e e a resistividade caracterstica do material. Os metais e sua ligas t^em resistividades baixas (da
ordem de 10;8".m), o que os caracteriza como bons
condutores de corrente eletrica. Ohm descobriu que
para condutores metalicos a temperatura constante, a
resist^encia dos mesmos n~ao depende da tens~ao aplicada.
Esta lei descreve uma propriedade particular de alguns
materiais que s~ao conhecidos como condutores lineares
ou ^ohmicos. Note que a express~ao I = V / R continua
valida mesmo para os materiais n~ao ^ohmicos.
A resistividade da maioria dos condutores metalicos
aumenta com a temperatura. Numa faixa de temperatura n~ao muito grande, a resistividade pode ser escrita
na seguinte forma:
T = 20 C 1 + (T ; 20C)
(1)
onde 20 C e a resistividade a 20C e e o coeciente
de temperatura da resistividade 6], o qual fornece a
variac~ao na resistividade de um dado material para um
aumento de 1 C em sua temperatura T. Em particular,
os valores de para a liga metalica Manganino (84%
Cu, 12% Mn, 4% Ni) e de 2 10;6 C;1 enquanto que
para o Tungst^enio (W) e de 4:5 10;3 C;1 .
A relac~ao entre a corrente I e a tens~ao V num elemento de circuito pode ser representada num graco
VI. Segundo a Lei de Ohm, a resistividade de um
condutor metalico a temperatura constante independe
da tens~ao aplicada e a curva esperada deveria ser uma
reta cujo coeciente angular forneceria o valor da resist^encia eletrica do elemento. Vamos ent~ao fazer este
experimento para dois elementos resistivos: um resistor comercial de o e uma l^ampada de lamento. A
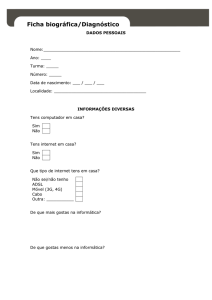
Figura 2 mostra o diagrama do circuito a ser conectado
a interface. A tens~ao no circuito e fornecida por duas
pilhas de 1.5 V e a variac~ao da tens~ao sobre o elemento
em analise e obtida atraves do potenci^ometro linear P1
(100").
Figura 2. Circuito para veri
cac~ao da Lei de Ohm a ser
conectado a interface.
A interface desenvolvida mede unicamente valores
de tens~ao, para sabermos o valor da corrente que ui
no circuito medimos a queda de tens~ao num resistor
garantidamente ohmico de 4.7". A corrente no circuito
e ent~ao dada pela express~ao (V1 ; V2 )=4:7, onde V1 e
a queda de tens~ao nos dois elementos e V2 e a tens~ao
sobre o elemento de analise. Neste experimento, estamos usando os canais 1 e 2 do conversor ADC0808 para
medirmos as quedas de tens~ao V1 e V2 respectivamente.
Os resultados de V2 e I s~ao armazenados e gracados
pelo microcomputador (Veja Anexo A).
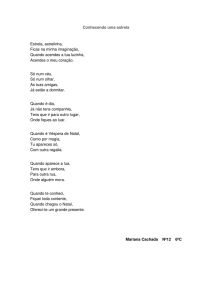
As Figuras 3(a) e 3(b), mostram o resultado para os
dois elementos de circuito considerados. Note que no
primeiro caso (resistor de o) o comportamento e exatamente o esperado e, de fato, R e constante. Para a
l^ampada de lamento, no entanto, vemos que o comportamento da corrente em func~ao da tens~ao n~ao e
linear. Qual a seria ent~ao, a diferenca existente entre
estes dois elementos resistivos? a resposta esta no coeciente de temperatura da resistividade. A medida que
se aumenta a tens~ao aplicada em um condutor, a corrente no mesmo aumenta e tambem sua temperatura
(a menos que seja resfriado) e como consequ^encia, a
sua resistividade. Ocorre que os resistores ohmicos s~ao
feitos de o de Manganino que, como vimos, possui
uma variac~ao de resistividade quase que insignicante
com a temperatura (da ordem de 10;6 C;1 ) enquanto
que o lamento de tungst^enio da l^ampada possui uma
variac~ao de cerca de 2000 vezes maior e, os efeitos de
temperatura s~ao maiores. Alem disso, os dispositivos
s~ao dimensionados, de acordo com a sua nalidade. O
Revista Brasileira de Ensino de Fsica vol. 20, no. 4, Dezembro, 1998
lamento da l^ampada tem pequenas dimens~oes e se encontra em um ambiente rarefeito e portanto, n~ao dissipa
energia de maneira eciente. Isto faz com que para um
mesma pot^encia dissipada nos mesmos a temperatura
do lamento seja muito mais alta que a temperatura do
o de Manganino do resistor. Este fato torna a l^ampada
um resistor n~ao ohmico. Note, no entanto, que no intervalo de baixas tens~oes a curva V I da l^ampada
apresenta comportamento linear (gura 3b), pois neste
intervalo a temperatura n~ao variou consideravelmente.
417
na natureza e o movimento oscilatorio ou vibracional.
Uma partcula esta oscilando quando executa movimentos periodicos em torno de uma posic~ao de equilbrio.
Quando a energia mec^anica de um movimento oscilatorio diminui com o tempo, este movimento e dito
amortecido. A Figura 4 mostra a montagem do experimento. A haste do p^endulo esta presa ao eixo de
um potenci^ometro linear P2 (1k"). O movimento oscilatorio do p^endulo faz com que haja uma variaca~o
na resist^encia do potenci^ometro e, consequentemente,
uma queda de tens~ao sobre mesmo (VP2). Um dos
canais do conversor ADC0808 l^e esta queda de tens~ao
em func~ao do tempo, a qual e proporcional a amplitude de oscilac~ao do p^endulo. Estas informaco~es s~ao
armazenadas atraves do programa de aquisic~ao e, posteriormente gracadas (Veja Anexo A).
Figura 3a. Curva tens~ao versus corrente para uma resist^encia de o de 5.6.
Figura 3b. Curva de Tens~ao versus corrente para uma
l^ampada de lamento.
E importante ressaltar que outros dispositivos
tambem podem ser analisados, por exemplo, um diodo.
Amortecimentos em P^endulos
A segunda experi^encia consiste em se analisar a amplitude de um p^endulo em func~ao do tempo. Conforme
sabemos, um tipo importante de movimento encontrado
Figura 4. Montagem do experimento de p^endulo simples a
ser conectado a interface. A tens~ao de alimentaca~o de 5V e
obtida diretamente da interface.
Existem dois tipos de atrito presentes neste experimento: o primeiro e o atrito seco entre as pistas do
potenci^ometro (dado por N, onde e o coeciente
de atrito e N e a normal as superfcies em contato) e o
segundo e o atrito viscoso entre o p^endulo e o meio uido onde ele se encontra (ar e agua, no presente caso).
Quando o p^endulo esta imerso no ar, a contribuic~ao do
atrito seco e muito maior que a do atrito viscoso e, enquanto que quando o p^endulo esta imerso na agua a
contribuic~ao do atrito viscoso e predominante.
418
D.F. de Sousa et al.
O tratamento matematico para ambas as situac~oes
e diferente e faremos uma breve descric~ao dos mesmos,
recomendando algumas leituras para maiores detalhes
7,8].
Oscilador com amortecimento seco ou \Coulombic Damping"
As caractersticas basicas deste tipo de atrito s~ao
bem denidas considerando-se que, num regime de
baixas velocidades, o atrito e constante em modulo
e com direc~ao sempre oposta a da velocidade. Por
quest~ao de maior simplicidade matematica iremos resolver o problema de um corpo oscilando ao longo do
eixo x, sujeito a uma forca de atrito do tipo \seco",
porem os resultados s~ao completamente analogos para
o caso do experimento.
Figura 5. 5a) Corpo de massa m preso a uma mola de constante elastica K , a forca de atrito entre o corpo e o solo e
igual a f0 em modulo e de sentido contrario ao da velocidade do corpo. 5b) Comportamento da forca de atrito em
relac~ao a velocidade do corpo em quest~ao na gura 5a.
Suponha um corpo preso a uma mola, oscilando na
posic~ao horizontal (Figura 5(a)), a forca de atrito pode
ser representada pela curva na Figura 5(b). A forca de
atrito e, neste caso, descontnua e a equaca~o de movimento para o corpo e igual a:
2
(1)
m ddtx2 + kx = f
a qual possui segundo membro descontnuo. Podemos
rescrever esta equac~ao de acordo com o sinal da velocidade da seguinte forma:
2
m ddtx2 + kx = ;f0 (dx=dt > 0)%
2
(2)
m ddtx2 + kx = +f0 (dx=dt < 0)
Vamos considerar primeiro o caso em que a mola foi esticada ate uma posic~ao inicial x0 , estando o corpo nesta
posic~ao com velocidade v = 0: Ao ser solto, o corpo ira
adquirir uma velocidade negativa ate uma nova posica~o
em que novamente v = 0 (x00 ). A equac~ao de movimento
nesta situac~ao e:
d2x + !2 x = +f =m
0
dt2 0
fazendo-se uma mudanca de variaveis X = (x ;
f0 =m!02 ), podemos rescrever a express~ao (3) da seguinte
forma.
d2 X + ! 2 X = 0
(4)
0
dt2
A soluc~ao desta equac~ao e uma soma de senos e cosenos
com as condic~oes iniciais X(0) = x0 ; f0 =m!02 e
dX=dtjt=0 = 0. Temos ent~ao que:
c
f0 cos! t , x = ; f0 + x ; f0 cos! t
X = x0 ; m!
0
0
0
2
m!02
m!02
0
d
vemos da express~ao acima que, num meio perodo
(;1 cos!0t 1) a amplitude do movimento decresce de uma quantidade 2f0 =m!02 : A partir da nova
posic~ao x00 = x0 ; 2f0 =m!02 , repetimos o mesmo procedimento anterior, agora com dx=dt > 0 e vemos que
num perodo completo a amplitude cai de 4f0=m!02 .
Seguindo um raciocnio de induc~ao nita chegamos a
conclus~ao de que as posic~oes dos maximos de x(t) obedecem a equac~ao:
4f
0n
(6)
xn (t) = x0 ; m!2 cos!0 t
0
onde n e o ndice do ponto de maximo. Substituindo
(5)
n por t=T onde T e o perodo da oscilaca~o temos a
seguinte express~ao para x(t):
4f0 t cos!t
xn(t) = x0 ; Tm!
(7)
2
0
o amortecimento neste caso e linear, pois a cada
perodo a amplitude decresce de uma quantidade xa
(4f0=m!02 ).
Oscilador com amortecimento viscoso
A equac~ao diferencial de movimento do oscilador
Revista Brasileira de Ensino de Fsica vol. 20, no. 4, Dezembro, 1998
419
com amortecimento viscoso e dada por:
2
m ddt2x + b dx
dt + kx = 0
(8)
onde kx e o termo da forca restauradora, bdx=dt e o
termo de amortecimento e m e a massa do corpo. A
soluc~ao desta equac~ao pode ser encontrada em qualquer
livro de fsica basica e tem a forma:
x = Ae;bt=2mcos(!t + )
(9)
onde ! e a frequ^encia do movimento dada por k=m ;
(b=2m)2 ]1=2, e fase inicial do movimento, A e a amplitude de oscilac~ao e = ;b=2m e a constante de
amortecimento.
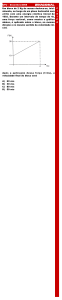
A Figura 6 mostra o resultado de x(t) para o
p^endulo oscilando em dois meios distintos: agua e ar.
Comparando as duas curvas podemos observar os decaimentos linear (p^endulo imerso no ar) e exponencial
(p^endulo imerso na agua). Note que o perodo das oscilac~oes permaneceu constante, pois, no regime de pequenos deslocamentos, o perodo depende apenas do
comprimento da haste do p^endulo segundo a express~ao
T = 2(g=l)1=2 , onde l e o comprimento da haste e g a
acelerac~ao da gravidade.
Figura 6. Gra
co de Posic~ao versus Tempo para o p^endulo
imerso em ar e em agua (os valores de tens~ao medidos
pela interface s~ao diretamente proporcionais aos valores de
posic~ao do p^endulo). Note que o perodo das oscilac~oes n~ao
mudou com a mudanO a do meio, isto era esperado pois
no regime de pequenos ~angulos o perodo de oscilac~ao do
p^endulo depende apenas do comprimento do mesmo.
Figura 7a. Posic~ao dos pontos de maximo em func~ao do
tempo para o p^endulo imerso em ar mostrando o decaimento
linear.
Figura 7b. Posic~ao dos pontos de maximo em func~ao do
tempo para o p^endulo imerso em agua mostrando o decaimento exponencial.
A partir das coordenadas dos pontos de maximo
nas curvas mencionadas acima, podemos construir as
curvas do amortecimento para cada caso. As Figuras
7(a) e 7(b) mostram as curvas de amortecimento linear para o atrito seco e de amortecimento exponencial
para o atrito viscoso, respectivamente. As constantes
de amortecimento podem ser facilmente derivadas do
ajuste destas curvas. No caso do atrito seco a constante
de amortecimento e dada pelo coeciente angular da
reta encontrada na gura 7a e seu valor foi de 0.013
s;1 . No caso do atrito viscoso a constante de amortecimento e dada por um ajuste exponencial (ou mesmo
linear, se a mesma for gracada em um papel mono-log)
da curva obtida na gura 7b, o valor encontrado para em nosso caso foi de 0.25 s;1 . Note que n~ao foi observado nenhum desvio do comportamento linear quando
o p^endulo esteve imerso em ar, o que nos garante que a
contribuic~ao do atrito viscoso neste caso e desprezvel.
Por outro lado, o amortecimento do atrito viscoso da
agua e aproximadamente 20 vezes maior que o amortecimento do atrito seco, o que justica que abandonemos
a contribuic~ao do atrito seco ao tratarmos o p^endulo
imerso em agua.
420
Sugerimos que tambem sejam feitos experimentos
com o p^endulo imerso em varios lquidos com diferentes viscosidades e sejam comparados os valores das
constantes de amortecimento em cada caso como uma
medida relativa da viscosidade destes meios.
D.F. de Sousa et al.
Conclus~ao
Por meio de uma interface de facil montagem transformamos a porta paralela de microcomputadores em
um digitalizador de baixo custo (R$ 80,00). Atraves da
mesma podemos automatizar o processo de coleta de
dados em inumeros experimentos de fsica, qumica etc.
Revista Brasileira de Ensino de Fsica vol. 20, no. 4, Dezembro, 1998
421
422
Refer^encias
1. D. F. de Sousa, J. Sartori, T. Catunda e L. Nunes,
Rev. Bras. Ensino de Fsica 17, 196 (1995).
2. Ray Wisman and Kyle Forinash, Am. J. Phys.
59, 187 (1991).
3. A. Henrquez, P. Gil e M. Alvarez, Am. J. Phys.
62, 568 (1994).
4. J.J. Brophy, Eletr^onica Basica (Guanabara Dois,
1972), pp. 375.
5. National Data Aquisition Databook, National
D.F. de Sousa et al.
Semiconductor Corporation (Santa Clara, CA,
1995), pp. 2-51.
6. Veja, por exemplo, F. Sears, M. Zemansky and
H. Young, College Physics (Addison-Wesley Pub.
Co., 1985), Chap. 28.
7. L.G. Neto, \Modelos eletr^onicos do atrito
seco, sistemas bi-estaveis e colis~oes elasticas e
inelasticas", Dissertac~ao de Mestrado (IFQSC,
USP, 1990).
8. R. Resnick and D. Halliday, Fsica, Vol. 2 (Ed.
Livros Tecnicos e Cientcos S.A., 1991), Cap. 15.