UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE
DO SUL - UNIJUÍ
DEPARTAMENTO DE CIÊNCIAS EXATAS E ENGENHARIAS - DCEENG
BACHARELADO EM ENGENHARIA ELÉTRICA
DOUGLAS DE CASTRO KARNIKOWSKI
DESENVOLVIMENTO DE UM SISTEMA DE MEDIÇÃO DE SINAIS
ELÉTRICOS
Ijuí
2013
DOUGLAS DE CASTRO KARNIKOWSKI
DESENVOLVIMENTO DE UM SISTEMA DE MEDIÇÃO DE SINAIS
ELÉTRICOS
Trabalho de Conclusão de Curso apresentado ao
Curso de Engenharia Elétrica da Universidade
Regional do Noroeste do Estado do Rio Grande
do Sul – UNIJUÍ, com requisito parcial para
obtenção do Grau de Engenheiro Eletricista.
Orientador: Msc. Eng. Mauricio de Campos
Ijuí
2013
FOLHA DE APROVAÇÃO
A COMISSÃO ABAIXO ASSINADA APROVA O PRESENTE
TRABALHO DE CONCLUSÃO DE CURSO INTITULADO:
DESENVOLVIMENTO DE UM SISTEMA DE MEDIÇÃO DE SINAIS
ELÉTRICOS
ELABORADO POR
DOUGLAS DE CASTRO KARNIKOWSKI
COMO REQUISITO PARCIAL PARA OBTENÇÃO DO TÍTULO DE
ENGENHEIRO ELETRICISTA
COMISSÃO EXAMINADORA:
__________________________________
Orientador: Mauricio de Campos
__________________________________
Banca: Julio Bolacell
AGRADECIMENTOS
A toda a Minha Família pelo apoio incondicional ao
longo de toda minha vida acadêmica.
Ao GAIC – Grupo de Automação Industrial e Controle
pela oportunidade e apoio ao longo do estágio.
Aos Professores da Unijuí pelo apoio
e aprendizado.
À todos aqueles, embora não mencionados aqui,
que colaboraram de maneira direta ou
indireta para a realização
deste trabalho.
RESUMO
Este trabalho de conclusão de curso apresenta o desenvolvimento de um medidor de
grandezas elétricas utilizando a Bobina de Rogowski como sensor de corrente e um sensor de
Efeito Hall para medição de tensão. As medições são enviadas para um software supervisório
através da comunicação serial RS-232. O sistema é projetado para aquisição de sinais de um
sistema elétrico trifásico, sendo capaz de realizar a medição tensão e corrente eficaz, consumo
de energia ativa e reativa, fator de potência, indicação do sentido do fluxo de potência, além
da identificação de distúrbios de tensão de curta e longa duração, interrupções de energia. O
trabalho inclui uma revisão dos conceitos de grandezas elétricas e Qualidade de Energia
Elétrica. É realizado um estudo do microcontrolador MS430F47197 próprio para o projeto de
medição de grandezas elétricas. Também é apresentado a analise dos tipos de sensores de
corrente e tensão, dando ênfase a Bobina de Rogowski e o sensor de tensão baseado no Efeito
Hall e o desenvolvimento dos seus respectivos circuitos de aquisição. São apresentados os
algoritmos utilizados para o cálculo das grandezas elétricas e dos distúrbios de tensão, além
do software supervisório desenvolvido na linguagem C# utilizando a ferramenta Microsoft
Visual Studio. Por fim, são apresentados resultados obtidos com o protótipo, onde foram
realizados testes de variação da frequência e da linearidade da Bobina de Rogowski com o
circuito integrador. Para validação dos algoritmos de cálculo das grandezas elétricos
comparou-se as medição do protótipo com o Analisador de Qualidade de Energia Dranetz© do
modelo PowerGuide 4400. Como teste de campo, o protótipo do medidor foi instalado para
medir as correntes primárias de um transformador de 500KVA de uma subestação subterrânea
pertencente ao sistema reticulado da CEEE, localizado na região metropolitana de Porto
Alegre – RS.
Palavras-Chave:
Monitoramento.
Medição
de
Grandezas
Elétricas,
Bobina
de
Rogowski,
ABSTRACT
This paper of college conclusion presents the development of meter electrics
magnitudes using the Rogowski Coil with current sensor and a Hall Effect sensor for voltage
measurement, where the measurements are sent for supervision software through of
communication RS-232. The system is designed to acquire signals from a three phase
electrical system, being able of to carry performing the measurement voltage and current
effective consumption of active and reactive power, power factor, indication of the direction
of power flow, beyond the identification of voltage disturbances short and long term, power
outages. The paper includes a review of the concepts of electrical and Power Quality. It is a
study of the microcontroller for the project itself MS430F47197 measuring electrical
quantities. It also presents the analysis of the types of current and voltage sensors,
emphasizing Rogowski coil and the voltage sensor based on the Hall Effect and the
development of their respective circuit acquisition. Following is presented the algorithms used
for the calculation of electrical and voltage disturbances, beyond the supervisory software
developed in C# using the Microsoft Visual Studio. Finally, results are presented obtained
with the prototype, where tests were performed varying the frequency and linearity of
Rogowski coil with integrator circuit. The validate algorithms for calculating electrical
quantities compared the measurement of the prototype with the Power Quality Analyzer
Dranetz©4400 of model PowerGuide. How to field test the prototype meter was installed to
measure the primary current of a transformer 500KVA substation belonging to the
underground system lattice CEEE, located in the metropolitan area of Porto Alegre - RS.
Keyword: Measure of Electric Quantities, Rogowski coil, Monitoring.
LISTA DE ILUSTRAÇÕES
Figura 1 - Diagrama de blocos básico de um sistema de medição ............................... 19
Figura 2 - Diagrama de blocos...................................................................................... 20
Figura 3 - Triângulo de Potências ................................................................................. 22
Figura 4 - Distúrbios de tensão típicos. ........................................................................ 24
Figura 5 - Dranetz-BMI PowerGuide® 4400. .............................................................. 26
Figura 6 - Fluke 435 série II. ........................................................................................ 26
Figura 7 - MSP430F47197. .......................................................................................... 29
Figura 8 - Relação entre a tensão de entrada e a saída digital (hexadecimal). ............. 31
Figura 9 - Ilustração do compilador IAR – Embedded Workbench. ............................. 32
Figura 10 - Resistor shunt. ............................................................................................ 34
Figura 11 - Transformador de corrente toroidal. .......................................................... 35
Figura 12 - Deslocamento de fase causado pelo TC..................................................... 35
Figura 13 - Efeito Hall. ................................................................................................. 36
Figura 14 - Sensor de corrente LA 25-NP. ................................................................... 36
Figura 15 - Desenho básico do funcionamento da bobina de Rogowski. ..................... 37
Figura 16 - Diagrama esquemático da bobina de Rogowski ideal. .............................. 37
Figura 17 - Integrador passivo. ..................................................................................... 38
Figura 18 - Integrador ativo. ......................................................................................... 38
Figura 19 - Circuito equivalente da bobina de Rogowski. ........................................... 39
Figura 20 - (a) bobina flexível fabricada pela LEM©, (b) Bobina rígida instalada em
linha de transmissão. ..................................................................................................... 40
Figura 21 - Integrador utilizado para aquisição de corrente. ........................................ 41
Figura 22 - Circuito de inversor e amplificador utilizado. ........................................... 42
Figura 23 - Divisor resistivo. ........................................................................................ 43
Figura 24 - TP ideal ...................................................................................................... 44
Figura 25 - LV 25-P ...................................................................................................... 45
Figura 26 - Esquema elétrico do sensor e a ligação à rede elétrica. ............................. 46
Figura 27 - Diagrama de ligação do MSP430F47197. ................................................. 48
Figura 28 - Circuito de aquisição de corrente. .............................................................. 49
Figura 29 - Circuito de aquisição de tensão. ................................................................. 49
Figura 30 - Esquema de ligação da porta serial. ........................................................... 50
Figura 31 - Esquema de ligação do EEPROM externa. ................................................ 51
Figura 32 - Fonte de 3,3V, 5V, ±12V. .......................................................................... 51
Figura 33 - LCD 16x2................................................................................................... 52
Figura 34 - Diagrama de blocos dos cálculos das grandezas elétricas e envio para serial
e para o LCD. ................................................................................................................ 53
Figura 35 - Diagrama de blocos da identificação de distúrbios de tensão. ................... 54
Figura 36 - Sinal senoidal e seu respectivo valor RMS. ............................................... 55
Figura 37 - Tela do software supervisório. ................................................................... 56
Figura 38 - Foto protótipo do medidor de grandezas elétricas. .................................... 57
Figura 39 - Rogowski (verde) e resistor shunt (amarelo) - 60Hz - 0º........................... 59
Figura 40 - Rogowski (verde) e Resistor shunt (amarelo) - 781Hz - 0º. ...................... 59
Figura 41 - Rogowski (verde) e Resistor shunt (amarelo) - 1490Hz - 0º. .................... 60
Figura 42 - Rogowski (verde) e Resistor shunt (amarelo) - 2940Hz - 0º. .................... 60
Figura 43 - Rogowski (verde) e Resistor shunt (amarelo) - 4180Hz - 4º. .................... 61
Figura 44 - Rogowski (verde) e Resistor shunt (amarelo) - 4999Hz - 2º. .................... 61
Figura 45 - Relação entre a corrente de entrada e a tensão de saída. ............................ 62
Figura 46 - Software supervisório em funcionamento. ................................................ 64
Figura 47 - Localização do transmissor PLC e do receptor/transmissor de sinal GSM.
...................................................................................................................................... 65
Figura 48 - (A) Placa de aquisição e o MSP430F47197; (B) Placa - comunicação CAN
e módulo TRF-24G. ...................................................................................................... 65
Figura 49 - Bobinas de Rogowski instaladas nos cabos isolados 15kV do primário do
transformador. ............................................................................................................... 66
Figura 50 - Caixa do protótipo instalada na parede da subestação. .............................. 66
Figura 51 - Gráfico dos valores medidos - Corrente primária A – dia 04/12/2012. ..... 67
Figura 52 - Gráfico dos valores medidos - Corrente primária A – dia 01/06/2013. ..... 67
LISTA DE TABELAS
Tabela 1 - Classificação das variações de curta duração. ............................................. 24
Tabela 2 - Características bobina de Rogowski ACF 3000. ......................................... 41
Tabela 3 - Relação frequência limite (fL) e a frequência de entrada fi. ........................ 42
Tabela 4 - Características do sensor de tensão LV 25-P. ............................................. 45
Tabela 5 - Configurações da comunicação serial. ........................................................ 50
Tabela 6 - Relação entre a corrente de entrada e a saída em tensão do circuito de
aquisição. ...................................................................................................................... 62
Tabela 7 - Tensão RMS. ............................................................................................... 63
Tabela 8 - Corrente RMS. ............................................................................................. 63
Tabela 9 - Carga - motor de indução de 1CV trabalhando a vazio. .............................. 63
LISTA DE ABREVIATURAS
Abreviatura
Significado
A/D
Analógico-Digital
C#
C-Sharp
CAN
Controller area network
CPU
Central Processing Unit
CEEE
Companhia Estadual de Energia Elétrica do Rio Grande do Sul
CV
DMA
Cavalo-vapor
Direct memory access
EEPROM
Electrically-Erasable Programmable Read-Only Memory
GPRS
General Packet Radio Service
I2C
Inter-Integrated Circuit
IrDA
Infrared Data Association
LCD
Liquid Crystal Display
MIPS
Milhões de Instruções Por Segundo
PLC
Power line communication
PRODIST
Procedimentos de Distribuição
RAM
Random Access Memory
RISC
Reduced instruction set computing
RMS
Root mean square
RTC
Real-Time Clock
SEP
Sistema Elétrico de Potência
SPI
Serial Peripheral Interface
TC
Transformador de Corrente
UART
Universal Asynchronous Receiver/Transmitter
LISTA DE SÍMBOLOS
Símbolo
A
AVF
B
C
Cs
EC
Eo(t)
Erabs
Er%
FP
F
fi
fL
f(t)
G(s)
I(n)
Is
Irms
Ki
Kv
Ls
M
M
N
N1
N2
P
Significado
Desvio padrão
Coeficiente linear
Ganho do integrador
Coeficiente angular
Capacitância
Capacitância parasita
Energia consumida
Tensão refletida no secundário da indutância mutua
Erro absoluto
Erro relativo percentual
Fator de potência
Frequência
Frequência de entrada
Frequência limite
Função continua no tempo
Função de transferência
Amostra “n” de corrente instantânea
Corrente da saída
Corrente eficaz
Ganho do sensor de corrente
Ganho no sensor de tensão
Indutância própria
Indutância mutua
Número de amostras
Amostra “n”
Enrolamento primário
Enrolamento secundário
Potência ativa
Q
Potência reativa
Ri
RM
RS
Rshunt
S
S
T
Ua
Ui
V1
V2
V(n)
Vi
Resistência interna do sensor de Efeito Hall
Resistencia se carga do sensor de Efeito Hall
Resistência interna da Bobina de Rogowski
Resistência do Resistor Shunt
Potência aparente
Variável complexa no domínio da frequência
Tempo de integração
Média aritmética de Ui
Valor de cada evento individual
Tensão do primário
Tensão do secundário
Amostra “n” de tensão instantânea
Tensão de entrada
Unidade
Farad
Farad
kWh
Volt
Hertz
Hertz
Hertz
Ampère
Ampère
Ampère
Henry
Henry
Watt
Volt ampère
reativo
Ohm
Ohm
Ohm
Ohm
Volt ampère
Segundos
Volt
Volt
Volt
Volt
VM
Vo(t)
Vrms
VMED
Vshunt
VVE
X
Xi
Xrms
Y
Yi
Zc
Tensão máxima de entrada do conversor A/D.
Tensão de saída
Tensão eficaz
Valor medido
Tensão de saída Resistor Shunt
Valor verdadeiro
Eixo da abscissa
Valores no eixo da abscissa
Valor eficaz
Eixo da ordenada
Valores no eixo da ordenada
Impedância de carga
Volt
Volt
Volt
Ohm
Ohm
SUMÁRIO
1.
INTRODUÇÃO .................................................................................................. 15
1.1.
Motivação ......................................................................................................... 16
1.2.
Objetivo ............................................................................................................ 17
1.3.
Estrutura do trabalho ........................................................................................ 17
2.
FUNDAMENTAÇÃO TEÓRICA ..................................................................... 19
2.1.
O sistema de medição ....................................................................................... 19
2.2.
Valor eficaz....................................................................................................... 20
2.3.
Teoria da Potência ............................................................................................ 21
2.4.
Qualidade de Energia Elétrica .......................................................................... 23
2.5.
Equipamentos de analise de QEE ..................................................................... 25
2.6.
Calibração ......................................................................................................... 26
3.
MICROCONTROLADOR MSP430 ................................................................ 29
3.1.
Conversor analógico para digital ...................................................................... 30
3.2.
Hardware Multiplier ......................................................................................... 31
3.3.
IAR – Embedded Workbench .......................................................................... 32
4.
AQUISIÇÃO DE SINAIS ELÉTRICOS .......................................................... 33
4.1.
Sensores de corrente ......................................................................................... 33
4.1.1.
Resistor Shunt ............................................................................................... 33
4.1.2.
Transformador de corrente (TC) .................................................................. 34
4.1.3.
Sensor de efeito Hall de corrente .................................................................. 35
4.1.4.
Bobina de Rogowski ..................................................................................... 37
4.2.
Sensores de tensão ............................................................................................ 43
4.2.1.
Divisor resistivo............................................................................................ 43
4.2.2.
Transformador de potencial .......................................................................... 44
4.2.3.
Sensor de efeito Hall de tensão .................................................................... 45
4.3.
5.
Amostragem e filtro anti-aliasing ..................................................................... 47
DESENVOLVIMENTO PRÁTICO ................................................................. 48
5.1.
5.1.1.
Circuitos Principais .......................................................................................... 48
MSP430F47197 ............................................................................................ 48
5.1.2.
Circuito de aquisição .................................................................................... 49
5.1.3.
Comunicação serial – RS-232 ...................................................................... 49
5.2.
Circuitos auxiliares ........................................................................................... 50
5.2.1.
EEPROM externa ......................................................................................... 50
5.2.2.
Fonte ............................................................................................................. 51
5.2.3.
LCD - Liquid Crystal Display ...................................................................... 52
5.3.
Software embarcado ......................................................................................... 52
5.4.
Software supervisório ....................................................................................... 55
5.5.
Protótipo ........................................................................................................... 56
6.
RESULTADOS E DISCUSSÃO ....................................................................... 58
6.1.
Teste do circuito de aquisição de corrente........................................................ 58
6.2.
Teste das medições ........................................................................................... 63
6.3.
Software e identificação de distúrbios de tensão .............................................. 64
6.4.
Teste de campo ................................................................................................. 65
7.
CONSIDERAÇÕES FINAIS ............................................................................. 68
REFERÊNCIAS BIBLIOGRÁFICAS...................................................................... 70
APENDICE A.............................................................................................................. 73
15
1. INTRODUÇÃO
A energia elétrica possui um papel fundamental para a sociedade moderna, estando
presente em praticamente todas as atividades realizadas pelo ser humano. Assim sendo,
qualquer distúrbio que ocorra no Sistema Elétrico de Potência (SEP) pode provocar sérios
prejuízos à concessionária de energia elétrica e aos consumidores, desde danos aos
equipamentos elétricos e até mesmo a interrupção do fornecimento de energia elétrica,
proporcionando perdas para a indústria ou ainda de multas às concessionárias.
Os eventos que prejudicam a qualidade da energia elétrica podem ser provenientes de
equipamentos instalados pelos consumidores ou ainda característicos do próprio sistema
elétrico. Neste segundo caso a ocorrência desses fenômenos são distintos e definidos como:
ação da natureza, causas aleatórias ou pela operação indevida de equipamentos. Entre os
exemplos provocados pela ação da natureza pode-se destacar: tempestades, contato de
animais, descargas atmosféricas, fortes ventos, inundações, etc. Como exemplos de causas
aleatórias temos: acidentes nas instalações, faltas nos equipamentos, sobrecargas em
dispositivos, dentre outras. Por fim, para as causas atribuídas a operações dos equipamentos
podemos citar: geração de harmônicos através da conexão de cargas não-lineares, manobra
de grandes cargas ou banco de capacitores, partidas de motores e por falhas em atividades de
manutenção da rede (MATANA, 2008).
Desta forma é crescente a busca para melhorar a confiabilidade, a qualidade e a
eficiência do SEP. Concebido na década de 40 do século passado, o grande desafio é
transformá-lo em um sistema moderno com o emprego das tecnologias de automação,
computação e comunicações. Estas tecnologias devem permitir o monitoramento e controle da
rede elétrica, permitindo o estudo de novas estratégias de controle e otimização da mesma. A
integração dessas tecnologias ao SEP é o que a literatura denomina de Smart Grids (Rede
Inteligente, traduzido para o Português) (FALCÃO, 2010).
Uma das tecnologias fundamentais para viabilizar a implantação da Rede Inteligente é
a oscilografia, empregando equipamentos capazes de monitorar o sistema elétrico e com isso
proporcionar as condições para a análise do sistema. Estas informações possibilitarão a
tomada de decisões a fim de solucionar as anomalias, e com isso prevenir maiores danos ao
sistema e aos equipamentos.
16
Os equipamentos responsáveis por identificar e mensurar os distúrbios referentes às
formas de onda de corrente e tensão da rede elétrica são conhecidos como Analisadores de
Qualidade da Energia Elétrica. O termo Qualidade de Energia Elétrica (QEE) tornou-se um
jargão no setor elétrico desde o final da década 80 e é definido pelo livro Power Quality
(SANKARAN, 2002) como:
Qualidade de Energia Elétrica é um conjunto de limites elétricos que
permite que um equipamento funcione na sua forma pretendida, sem perda
significativa de desempenho ou expectativa de vida (traduzido) (SANKARAN,
2002).
Além da medição referente à QEE, a utilização de equipamentos de medição é de
suma importância para o levantamento da curva de carga dos consumidores de energia
elétrica. Este estudo possibilita o desenvolvimento de métodos estatísticos para a previsão de
demanda, viabilizando o planejamento do sistema elétrico a curto, médio e longo prazo.
Neste processo, a tendência é que todos os componentes do SEP sejam monitorados e
automatizados. Porém, para que isto seja possível, esses equipamentos devem apresentar um
baixo custo e atender aos requisitos das normas para tornar viável a sua utilização em larga
escala.
1.1. Motivação
A partir do projeto de pesquisa e desenvolvimento do Grupo de Automação Industrial
e Controle (GAIC) para o monitoramento de uma subestação subterrânea de distribuição de
energia elétrica utilizando uma rede de sensores inteligentes híbrida e PLC1 (Power Line
Communication) surgiu a necessidade do desenvolvimento de um sistema de medição para as
grandezas elétricas provenientes dos transformadores das subestações. As demais grandezas
monitoradas pela rede de sensores são: temperatura ambiente e do transformador, nível de
alagamento, pressão do transformador, identificação de intrusos na subestação, bombas e
ventilação (ligado ou desligado).
1
PLC é um sistema que utiliza a rede elétrica como meio de transporte para a comunicação de dados.
17
A rede de comunicação é composta por uma rede CAN2 (Controller Area Network),
um dispositivo de comunicação por rádio frequência (módulo TRF-2,4G), a comunicação
PLC e um modem GPRS3 (General Packet Radio Service) (GIACOMINI, et al., 2012).
A rede de sensores foi instalada no sistema network/reticulado4 (GOUNÊA, et al.,
2011) da CEEE (Companhia Estadual de Energia Elétrica) na região metropolitana de Porto
Alegre, que possui tensões primárias de 13,8kV e tensões secundárias de 127/220V e é
composto por transformadores de 500kVA submersíveis, alojados em câmaras subterrâneas
sob o leito das ruas.
1.2. Objetivo
Diante das oportunidades e dos desafios abordados anteriormente, este trabalho
objetiva o desenvolvimento de um equipamento para medição de parâmetros elétricos capaz
de enviar os dados para um sistema supervisório. Também é desenvolvido um software de
gerenciamento que exibirá esses dados em tempo real e que armazenará as medições
utilizando a memória do microcomputador.
O sistema elétrico a ser analisado pelo medidor é do tipo trifásico, que é a forma mais
comum de geração, transmissão e distribuição de energia. Além da medição de corrente e
tensão, o sistema realizará os cálculos de consumo de energia ativa e reativa, potências ativa,
reativa e aparente, fator de potência, detecção de variações de tensão de curta e longa duração,
(afundamentos e elevações), interrupções de energia e indicação do sentido do fluxo de
potência.
1.3. Estrutura do trabalho
Este trabalho esta dividido em sete capítulos, no primeiro capítulo é apresentado à
introdução, a motivação e o objetivo do trabalho. No segundo capítulo é introduzido o
conceito de um sistema de medição, visando esclarecer o funcionamento geral deste sistema,
2
CAN é um padrão de barramento que possibilita a comunicação de microcontroladores e dispositivos
entre si sem a necessidade de um computador host.
3
GPRS é um conjunto de protocolos de comunicação baseados em IP utilizados em telefonia móvel.
4
O sistema reticulado (network) é um sistema de distribuição em baixa tensão, que possui um conjunto
de transformadores cujos secundários são ligados em paralelo, suprindo a carga. Essa topologia permite que o
fornecimento de eletricidade se mantenha ainda que um ou mais transformadores saiam de serviço, desde que a
potência total dos transformadores remanescentes seja igual ou superior à demanda drenada pelas cargas, além
disso, permite a melhoria da característica de tensão secundária.
18
assim como os conceitos básicos das grandezas medidas. Além disso, é explicado como é
realizado a calibração de equipamentos de medição.
O terceiro capítulo aborda o microcontrolador MSP430F47197, pertencente à família
MSP430, produzido pela empresa de semicondutores Texas Instruments, que será utilizado no
projeto, onde será descrito suas características e o software IAR Embedded Workbench, que
nada mais é que o ambiente para o desenvolvimento de projetos dos microcontroladores
MSP430.
No quarto capítulo é realizado o estudo dos sensores de tensão e corrente a serem
utilizados no medidor e o estudo do desenvolvimento do circuito aquisição de sinais para os
sensores.
No quinto capítulo são explicados os algoritmos e rotinas empregadas no
microcontrolador para realizar os cálculos das grandezas elétricas. Também é esclarecido o
desenvolvimento do software de gerenciamento, além dos circuitos principais e auxiliares
desenvolvidos para o protótipo.
O Capítulo 6 está concentrado nos resultados obtidos pelo medidor em relação à
exatidão e precisão para cada grandeza. Também é realizado testes de desempenho do circuito
de aquisição de corrente com a variação da frequência da corrente medida. Como teste de
campo, é apresentado o protótipo instalado em uma subestação subterrânea no centro da
cidade de Porto Alegre para medição de corrente do primário do transformador de distribuição
de energia.
Por fim, é exposto as considerações finais e é indicado quais os possíveis trabalhos
futuros a serem realizados.
19
2. FUNDAMENTAÇÃO TEÓRICA
Nas próximas seções é realizada uma breve descrição do sistema de medição proposto,
visando esclarecer o funcionamento geral deste sistema, assim como os conceitos básicos das
grandezas medidas pelo mesmo.
2.1. O sistema de medição
Um sistema de medição é basicamente composto por cinco módulos: sensores,
condicionamento, conversor analógico para digital (A/D), processamento digital e a saída,
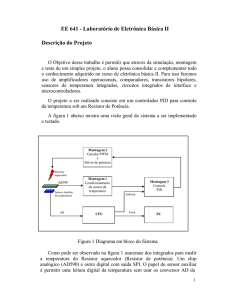
como ilustrado no diagrama da Figura 1. O sensor é o elemento capaz de transformar a
grandeza física de entrada em uma grandeza de tensão ou de corrente. Geralmente o sinal de
saída proveniente do sensor possui amplitude e sinais incompatíveis (ruídos) para medição,
desta forma, é utilizado um circuito de condicionamento para adequar esse sinal. Já o
conversor A/D transforma o sinal analógico proveniente do circuito de condicionamento em
um sinal digital. O sinal digital é processado através de um microcontrolador que realiza os
cálculos das grandezas e os envia para uma interface homem máquina ou para um sistema de
armazenamento (saída) (SANTOS, 2010).
Figura 1 - Diagrama de blocos básico de um sistema de medição
Sensor
Circuito de
Condicionamento
Conversor A/D
Processamento
digital
Saída
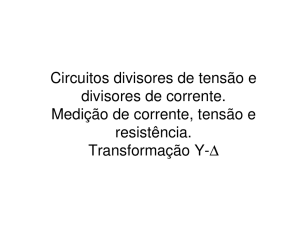
O sistema de monitoramento proposto nesse trabalho é composto, essencialmente, por
seis unidades distintas: 1) Sensor de corrente baseado na bobina de Rogowski e sensor de
tensão baseado no efeito Hall; 2) Unidade de condicionamento do sinal de tensão proveniente
dos sensores; 3) O microcontrolador MSP430F47197; 3) Fonte de alimentação do sistema; 4)
Comunicação serial RS232 com um microcomputador; 5) Software para gerenciamento e
armazenamento das grandezas; e 6) O display LCD 16x2;
Na Figura 2 é representado o diagrama de blocos do protótipo desenvolvido.
20
Figura 2 - Diagrama de blocos.
Display LCD
16X2
Sensores de
corrente e
de tensão
Circuito de
aquisição de
sinais
Comunicação
Serial
Software
Fonte
auxiliar
2.2. Valor eficaz
O valor eficaz ou valor quadrático médio (RMS - do inglês Root Mean Square)
corresponde à raiz quadrada da integral de uma função continua f(t) ao quadrado, dividido
pelo intervalo de tempo da integração (T), representado pela equação (1).
(1)
√ ∫ [
]
O algoritmo do cálculo do valor eficaz para um sinal em tempo discreto baseia-se na
aplicação da definição de valor eficaz para um sinal amostrado (XAVIER, 2011). Na equação
(2) é apresentado o cálculo da tensão eficaz (Vrms) e na equação (3) o cálculo da corrente
eficaz (Irms).
√∑
(2)
√∑
(3)
Onde: Kv - ganho sensor de tensão
Ki - ganho sensor de corrente
m - número de amostras no período de integração
21
V(n) – amostra de tensão instantânea em “n”
I(n) – amostra de corrente instantânea em “n”
2.3. Teoria da Potência
O módulo I dos Procedimentos de Distribuição de Energia Elétrica no Sistema Elétrico
Nacional (PRODIST) da Aneel define a potência aparente como sendo:
Potência aparente - Corresponde ao produto entre tensão eficaz e corrente
eficaz em um dipolo elétrico. Para sistemas bifásicos ou trifásicos utiliza-se a
composição entre as fases. Representa a “utilização” do sistema elétrico, equivalente
à potência média que seria transmitida para tensões e correntes senoidais e em fase carga resistiva equivalente, simplificadamente levando às mesmas perdas joule no
sistema (ANEEL, 2012).
Assim a potência aparente (S) é dada pela equação (4), onde Irms é a corrente eficaz e
Vrms é a tensão eficaz. A unidade de medida é volt-ampère, cuja sigla é VA.
(4)
A definição do Modulo I do PRODIST para a potência ativa é a seguinte:
Potência ativa - Energia total consumida/fornecida durante determinado
intervalo de tempo – que produz trabalho, dividida pelo próprio tempo, expressa em
watts (W) e seus múltiplos (ANEEL, 2012).
Para calcular a potência ativa (P) em utiliza-se a equação (5).
(5)
∫
Para o calculo a potência ativa (P) em tempo discreto temos a equação (6).
(
∑
)
(6)
22
A definição do modulo I do Prodist para a potência reativa é dada por:
Potência reativa - definida como a raiz quadrada da diferença dos
quadrados da potência aparente e da potência ativa, expressa em volt-ampères
reativa (VAR) e seus múltiplos (ANEEL, 2012).
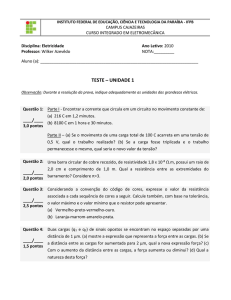
Para encontrar a potência reativa (Q) usa-se relação do Triângulo de Potências,
ilustrado na Figura 3, que reflete a relação entre as potências aparente, ativa e reativa com o
ângulo φ (BOYLESTAD, 2004).
Figura 3 - Triângulo de Potências
Po
tê
i
nc
p
aa
are
(VA
nte
)
Potência
reativa
(VAr)
Ø
Potência ativa (W)
Assim, pode-se calcular a potencia reativa através da equação (7). A unidade de
medida é volt-ampère reativo, cuja unidade é VAR.
√
(7)
A definição do fator de potência dada pelo modulo I do PRODIST é a seguinte:
Fator de potência - Razão entre a energia elétrica ativa e a raiz quadrada da
soma dos quadrados das energias elétricas ativa e reativa, consumidas em um
mesmo período especificado (ANEEL, 2012).
O Fator de Potência (FP) pode ser calculado através da equação (8).
(8)
23
A Energia consumida (EC) é determinada simplesmente pelo produto da Potência ativa
média pelo tempo dividido por 1000, dada pela equação (9). A unidade de medida é KiloWatt-Hora, cuja unidade é KWh.
(9)
2.4. Qualidade de Energia Elétrica
A avaliação da QEE é feita de acordo com dois aspectos: análise da qualidade do
produto e a análise da qualidade do serviço prestado. A qualidade do produto caracteriza os
fenômenos e estabelece os parâmetros e valores de referência relativos à conformidade de
tensão em regime permanente e às perturbações na forma de onda de tensão. A qualidade do
serviço estabelece os procedimentos relativos aos indicadores de continuidade e dos tempos
de atendimento. As perturbações na qualidade do produto em regime permanente ou
transitório são (ANEEL, 2012):
Tensão em regime permanente: variação no valor de tensão elétrica especificada
como adequada (tensão de referência) para um sistema.
Harmônicos: As distorções harmônicas são fenômenos associados com deformações
nas formas de onda das tensões e correntes em relação à onda senoidal da frequência
fundamental.
Desequilíbrio de tensão: Fenômeno associado a alterações dos padrões trifásicos do
sistema de distribuição.
Flutuação de tensão: Variação aleatória, repetitiva ou esporádica do valor eficaz da
tensão.
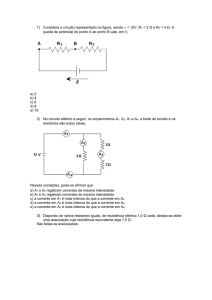
Variações de tensão de curta duração: Variações de tensão de curta duração são
desvios significativos no valor eficaz da tensão em curtos intervalos de tempo. As
variações de tensão de curta duração são classificadas de acordo com a Tabela 1.
24
Tabela 1 - Classificação das variações de curta duração.
Classificação
Denominação
Duração da
Variação
Inferior ou igual a
três segundos
Variação
momentânea de
tensão
Interrupção
momentânea de
tensão
Afundamento
momentâneo de
tensão
Elevação
momentânea de
tensão
Interrupção
temporária de tensão
Variação temporária
de tensão
Afundamento
temporário de tensão
Elevação temporária
de tensão
Superior ou igual a
um ciclo e inferior
ou igual a três
segundos
Superior ou igual a
um ciclo e inferior
ou igual a três
segundos
Superior a três
segundos e inferior a
três minutos
Superior a três
segundos e inferior a
três minutos
Superior a três
segundos e inferior a
três minutos
Amplitude da
tensão (RMS) em
relação à tensão de
referência
Inferior a 0,1 p.u
Superior ou igual a
0,1 e inferior a 0,9
p.u
Superior a 1,1 p.u
Inferior a 0,1 p.u
Superior ou igual a
0,1 e inferior a 0,9
p.u
Superior a 1,1 p.u
Fonte: PRODIST - Módulo 8 - Qualidade da Energia Elétrica
Na Figura 4 são ilustrados os distúrbios de tensão típicos de curta duração.
Figura 4 - Distúrbios de tensão típicos.
Fonte: (XAVIER, 2011).
25
As causas típicas para os afundamentos de tensão estão agregadas à faltas no sistema
em geral, grandes variações de carga e partidas de grandes motores. Quando ocorre uma falta
no sistema, os afundamentos de tensão ocorrem devido à circulação de corrente de falta pela
impedância do sistema, ocasionando uma queda de tensão no ponto de interesse (ALVES,
2011).
As elevações de tensão também estão associadas à faltas no sistema em geral, saída de
grandes cargas ou energização de bancos de capacitores. Quando da ocorrência de faltas no
sistema, os saltos de tensão ocorrem na fase não atingida pela falta.
Nestes casos, a
severidade da elevação de tensão durante a condição de falta é determinada pela localização
da falta, impedância do sistema e o tipo de aterramento. Próximo à subestação haverá pouco
ou nenhum salto de tensão pelo fato da usual conexão delta-estrela prover um caminho de
baixa impedância de sequência zero para a corrente de falta (ALVES, 2011).
Variação de frequência: Em condições nominais e em regime permanente a
frequência deve ser mantida entre 59,9Hz e 60,1Hz. Já as instalações de geração
conectadas ao sistema de distribuição devem garantir que a frequência retorne para a
faixa de 59,5 Hz a 60,5 Hz, no prazo de 30 segundos após sair desta faixa, quando
ocorrer distúrbios no sistema de distribuição.
2.5. Equipamentos de analise de QEE
Existem disponíveis no mercado diversos equipamentos para realizar o monitoramento
do sistema elétrico, dos quais são apresentados dois exemplos: o PowerGuide® 4400 (Figura
5), fabricado pela empresa DRANETZ-BMI e o Fluke 435 série II (Figura 6). Ambos
permitem a analise parâmetros, eventos e anomalias relativamente à energia disponível na
rede elétrica. Esses equipamentos medem a tensão, a corrente, frequência, potência,
desequilíbrio e oscilações, harmônicas, efeitos transitórios, interrupções, entre outros.
26
Figura 5 - Dranetz-BMI PowerGuide® 4400.
Fonte: http://dranetz.com/
Figura 6 - Fluke 435 série II.
Fonte: http://www.fluke.com
2.6. Calibração
Por melhor que seja a qualidade de um sistema de medição, sempre existem erros nas
medições, sejam por fatores internos ou externos ao sistema. Em alguns casos pode-se estimar
o erro através do estudo de cada componente do sistema, entretanto a melhor forma de
obtermos o valor real do erro é a partir da Calibração.
Segundo Armando Albertazzi Gonçalves Junior (GONÇALVES, 2006) calibração é
definida como:
27
Calibração é um procedimento experimental através do qual são
estabelecidas, sob condições específicas, as relações entre os valores indicados por
um instrumento de medição ou sistema de medição ou valores representados por
uma medida materializada ou um material de referência, e os valores
correspondentes das grandezas estabelecidos por padrões (GONÇALVES, 2006).
Para realizar a calibração de um equipamento é necessária a utilização de outro
equipamento que possua um erro de medição menor que um décimo do erro de medição
desejado para comparação entre as medições.
Para avaliar a classe de exatidão5 de um sistema de medição deve-se calcular o erro
absoluto, o erro relativo percentual e o desvio padrão. O erro absoluto (Erabs) corresponde à
diferença algébrica entre o valor medido (VMED) e o valor verdadeiro (VVE), como é mostrado
na equação (10).
(10)
O erro relativo percentual (Er%) é definido pela equação (11).
(11)
O Desvio padrão (σ) é a raiz quadrada da soma dos quadrados de todos os desvios
individuais dividido pelo número total de leituras, como mostra a equação (12).
√
∑
(12)
Onde: Ui - valor de cada evento individual;
Ua - média aritmética dos valores Ui;
n – número de amostras
5
Classe de exatidão: Classe de instrumentos de medição ou de sistemas de medição que satisfazem
requisitos metrológicos estabelecidos, destinados a manter os erros de medição ou as incertezas de medição
instrumentais dentro de limites especificados, sob condições de funcionamento especificadas. Este conceito é
aplicado a medidas materializadas. Uma classe de exatidão é usualmente indicada por um número ou símbolo
adotado por convenção e denominado de índice de classe.
28
A média aritmética simples é definida pela equação (13).
(13)
∑
Outra ferramenta matemática que auxilia para realização de uma calibração é por meio
da Regressão linear. Na prática, podem ocorrer relações não lineares entre as medições e
através da regressão linear é estabelecida uma relação entre esses parâmetros medidos. Esta
relação é expressa pela equação da reta que é representada pela equação (14).
(14)
Onde: X - eixo da abscissa;
Y - eixo da ordenada;
a - Coeficiente linear;
b - Coeficiente angular;
Para obter os valores de “A” e “B” utilizasse as equações (15) e (16).
(15)
[ ∑
∑
∑
]⁄ [ ∑
(∑
) ]
(16)
[∑
∑
∑
∑
Onde: Xi - valores no eixo da abscissa;
Yi - valores no eixo da ordenada;
]⁄[ ∑
(∑
) ]
29
3. MICROCONTROLADOR MSP430
O microcontrolador que será utilizado no projeto é o MSP430F47197, apresentado na
Figura 7, que pertencente à família MSP430, produzido pela empresa de semicondutores
Texas Instruments.
Este microcontrolador foi escolhido por apresentar conversão analógica para digital
(A/D) precisa (16 bits) e 7 amostras simultâneas, ideais para análise de um sistema trifásico e
uma entrada de tensão negativa e positiva no conversor A/D que diminuiu os custos do
circuito de aquisição. Além disto, apresenta um Real-Time Clock (RTC) interno com um
calendário de 1901 até 2099 também necessários no projeto de um sistema de medição. Os
microcontrolador da família MSP430 também tem a característica de reduzido consumo de
energia, graças aos diferentes modos de funcionamento da CPU (Central Processing Unit)
que podem ser implementados (PEREIRA, 2005).
Figura 7 - MSP430F47197.
Fonte: http://www.ti.com/product/msp430f47197
Características gerais da arquitetura do MSP430F47197 (TEXAS INSTRUMENTS,
2012):
Baixo consumo de energia: são chips conhecidos pelo seu consumo
incrivelmente baixo (de 0,2uA para retenção dos dados na RAM, cerca de
350uA/MIPS em funcionamento normal e 1,1uA em modo standby);
Memória flash de 120KB;
Memória RAM de 4KB;
30
Arquitetura RISC;
Barramento de dados de 16 bits;
Conversor analógico para digital (A/D) de 16 bits;
Hardware Multiplier;
Ciclos de maquina de 62,5ns ou 16MIPS;
3 Controladores DMA;
4 comunicações seriais, UART, IrDA, I2C e SPI;
Real-Time Clock (RTC) interno: possibilitando interrupções de 1 segundo com
a utilização de um cristal externo de 32,768 KHz;
Tensão de operação entre 1,8 a 3,6 Volts;
100 pinos;
3.1. Conversor analógico para digital
O A/D do MSP430F47197 possui uma modulação sigma-delta (ΣΔ), onde a conversão
é realizada através de feedback de erro, em que a diferença entre os dois sinais é medido e
utilizado para melhorar a conversão. O sinal de baixa resolução, normalmente muda mais
rapidamente do que o sinal de alta resolução, e pode ser filtrada para recuperar o sinal de alta
resolução, com pouca ou nenhuma perda de fidelidade (TEXAS INSTRUMENTS, 2012).
Na Figura 8 é mostrado à relação entre a tensão de entrada e a saída digital
(hexadecimal) do conversor A/D, onde existe a possibilidade de habilitar um registrador para
definir se o A/D terá entrada de tensão de entrada negativa e positiva (a), tensão de entrada
negativa e positiva com complemento de 2 (b) ou somente entrada de tensão positiva (c).
Como o A/D é de 16 bits para uma faixa de tensão de ± 600mV, cada bit representa uma
tensão de 0,000018310546875V, ideal para a medição de pequenos sinais.
31
Figura 8 - Relação entre a tensão de entrada e a saída digital (hexadecimal).
Fonte: Adaptado (TEXAS INSTRUMENTS, 2012)
Também é possível configurar através de registradores a conversão independente dos
7 canais A/D ou a conversão simultânea dos canais e desta forma diminuir o erro de
deslocamento de fase entre tensão e a corrente para a medição de potência ativa.
O MSP430F47197 possui um registrador para compensar o erro de fase entre a
corrente e a tensão proveniente dos circuitos de aquisição. Para um sinal medido de
frequência de 60Hz, pode-se compensar um atraso de fase de até ±2,62º (TEXAS
INSTRUMENTS, 2012).
3.2. Hardware Multiplier
O MSP430F47197 possui em sua arquitetura a função Hardware Multiplier, que é um
periférico que não faz parte da CPU do microcontrolador. Com esse periférico é possível
realizar multiplicações sem prejudicar a velocidade do processamento da CPU, permitindo a
implementação de cálculos mais complexos e com mais precisão.
O Hardware Multiplier suporta multiplicação de valores com até 32x32 bits,
multiplicação de números fracionários e de multiplicações acumuladas. Tais multiplicações
geram resultados divididos em duas partes: a parte menos significativa (8, 16 ou 32 bits) e a
parte mais significativa (8, 16 ou 32 bits). Para unir essas partes devem ser usar as seguintes
propriedades da linguagem C: a Estrutura e a União. Uma Estrutura é um agrupamento de
variáveis individuais de qualquer tipo, referenciadas por um nome em comum. A União é um
32
tipo especial de dado no qual as variáveis declaradas residem num mesmo endereço de
memória (PEREIRA, 2005).
3.3. IAR – Embedded Workbench
O software que será utilizado para trabalhar com o microcontrolador MSP430F47197
Embedded Workbench (Figura 9), desenvolvido pela IAR Systems. O ambiente Embedded
Workbench é um Ambiente Integrado de Desenvolvimento, composto de um editor de
arquivos, montador em Assembly, Compilador C e Embedded C++, simulador e emulador.
Isso significa que o programador necessita de apenas uma ferramenta de software para todo o
processo de desenvolvimento utilizando os microcontroladores MSP430 (PEREIRA, 2005).
Figura 9 - Ilustração do compilador IAR – Embedded Workbench.
33
4. AQUISIÇÃO DE SINAIS ELÉTRICOS
Os níveis de medida de tensão e corrente elétrica muitas vezes não podem ser
aplicados diretamente aos circuitos que realizam a aquisição dessas grandezas. Neste caso é
necessário o emprego de um dispositivo ou método para adequar estes níveis de tensão ou
corrente, que estão sendo medidos, aos níveis de tensão que o conversor A/D do
microcontrolador aceita. O dispositivo capaz de realizar essa conversão de uma grandeza
física em uma grandeza elétrica de tensão para medição é chamado de Sensor.
Para a escolha do sensor mais adequado para cada aplicação primeiramente é
necessário conhecer suas características, analisando sua função de transferência, nível de
saturação, excitação, impedância de saída e sua resposta em frequência. A função de
transferência determina a relação do sinal de entrada com o sinal de saída. A saturação define
os limites de funcionamento em que o sensor perde sua linearidade. A propriedade de
excitação especifica quais as grandezas imprescindíveis ao funcionamento dos sensores. A
impedância de saída serve para o projeto do circuito de aquisição com o sistema de medição.
Já a resposta em frequência define a suscetibilidade do sensor a variação de frequência do
sinal de entrada. Outras características que também devem ser analisadas na escolha de um
sensor são em relação ao seu fator térmico, precisão, formato, dimensões, modo de instalação
e preço (HIGASHI, 2006).
4.1. Sensores de corrente
Dentre os sensores de medição de corrente existentes pode-se destacar: o Resistor
Shunt, transformador de corrente, transdutor de Efeito Hall, o sensor óptico e a bobina de
Rogowski.
4.1.1. Resistor Shunt
O Resistor Shunt é um dos métodos mais utilizados para medição de corrente, onde
um resistor de baixa resistência é colocado em série com a carga. A medição da corrente é
obtida pela lei de Ohm, representada pela equação (17), onde mede se a tensão no Resistor
Shunt.
34
(17)
Na Figura 10 é mostrado o resistor shunt inserido em um circuito com corrente i(t),
tensão V(t) de entrada e com uma tensão de saída Vshunt (t) para o dispositivo de medição.
Figura 10 - Resistor shunt.
O Resistor Shunt apresenta como vantagem o baixo custo e como inconvenientes o
resistor pode ser danificador devido a altas correntes (aquecimento), uma tensão elevada pode
provocar problemas de isolação elétrica e a alta frequência pode produzir o Efeito Pelicular
(Skin) (HIGASHI, 2006).
4.1.2. Transformador de corrente (TC)
É um transformador que tem a finalidade de medir a corrente elétrica que circula em
um cabo ou barra de alimentação, e transformá-la em outra corrente de valor menor, para ser
transmitida a um instrumento de medição ou circuito eletrônico. O TC toroidal é muito
utilizado por permitir que o condutor passe no orifício central do transformador, sem sofrer
interrupções, como ilustra a Figura 11.
35
Figura 11 - Transformador de corrente toroidal.
Quando se utiliza transformadores de corrente para medição, pode ocorrer à
introdução de um deslocamento de fase entre a tensão e a corrente considerável, que
proporciona um erro de medição, como é ilustrado na Figura 12. Onde a tensão V(t) e
corrente Iin(t) são os sinais a serem medidos com uma defasagem ϴ entre eles, e a corrente
Iout(t) é a saída do secundário do TC com o acréscimo de um ângulo Ø em relação a corrente
Iin(t). Assim, deve-se escolher TC com o menor deslocamento de corrente possível (TEXAS
INSTRUMENTS, 2001).
Figura 12 - Deslocamento de fase causado pelo TC.
4.1.3. Sensor de efeito Hall de corrente
O efeito de Hall foi descoberto no ano de 1879 por E.H. Hall, que submeteu um
condutor elétrico a um campo magnético perpendicular a direção da corrente elétrica. Os
elétrons em movimento neste condutor estão sujeitos a uma força devido ao campo magnético
36
que os empurra na direção de uma das faces do condutor, como ilustra a Figura 13. Isto faz
com que ocorra um acumulo de elétrons em uma das faces do condutor que adquire uma carga
negativa. No lado oposto aparece uma carga positiva pela ausência dos elétrons que se
deslocaram para a outra face. Esta distribuição não uniforme de cargas leva ao aparecimento
de um campo elétrico que se opõem ao movimento das cargas fazendo com que se estabeleça
um equilíbrio entre o efeito do campo magnético externo e o campo elétrico interno. Este
campo elétrico dá origem a uma diferença de potencial entre as laterais do condutor
(XAVIER, 2011).
Figura 13 - Efeito Hall.
Fonte: (XAVIER, 2011)
Um exemplo de transdutor de corrente baseado no Efeito Hall é o LA 25-NP,
fabricado pela empresa LEM©. Este sensor possui a capacidade de medir corrente continua e
alternada, isolamento galvânico entre o circuito primário e o circuito secundário, linearidade,
alta precisão (+/-0,5%) e imunidade a interferências externas (LEM, 2013). Entretanto, para
sua utilização é necessário à abertura o circuito que se deseja medir a corrente elétrica e assim
limitando sua utilização.
Figura 14 - Sensor de corrente LA 25-NP.
Fonte: http://www.lem.com
37
4.1.4. Bobina de Rogowski
A bobina de Rogowski (Figura 15) consiste em um núcleo toroidal, não magnético,
colocado ao redor de um condutor. Desta forma, quando é gerado um campo magnético por
uma corrente alternada que percorre o condutor é induzido uma tensão nos terminais da
bobina.
Figura 15 - Desenho básico do funcionamento da bobina de Rogowski.
Fonte: (HIGASHI, 2006)
O valor da tensão terminal da bobina (Vo(t)) é proporcional à derivada da corrente que
circula pelo condutor, como é representado na equação (18). Esta equação é valida para uma
bobina ideal, representada pela Figura 16.
(18)
Onde: M – Indutância mutua.
Figura 16 - Diagrama esquemático da bobina de Rogowski ideal.
i(t)
M
Vo(t)
38
Para utilizar a bobina de Rogowski para medição é imprescindível deixar o sinal de
tensão (Vo(t)) proporcional a corrente i(t), para fazer isso é necessário realizar a integração da
tensão (Vo(t)). As formas de realizar esta integração são:
Circuito integrador passivo: é formado por capacitores e resistores, como é mostrado
na Figura 17. Esse tipo de integração é utilizado para frequências elevadas ou para
pulsos de curta duração (DELBEN, 2008).
Figura 17 - Integrador passivo.
Vi(t)
R
Vo(t)
C
Circuito integrador ativo: é formado por capacitores, resistores e por amplificadores
operacionais, como é mostrado na Figura 18. Este integrador é usado tanto para baixas
ou altas frequências.
Figura 18 - Integrador ativo.
C
Vi(t)
R
Vo(t)
+
O circuito da bobina de Rogowski real apresenta outras grandezas que influenciam em
sua modelagem matemática para determinação de sua função de transferência, como mostrado
na Figura 19. As grandezas a serem consideradas são: a resistência interna (Rs), a indutância
própria (Ls), a capacitância parasita (Cs) devido a proximidade das espiras e a carga de alta
39
impedância (Zc). Onde Vo(t) é a tensão terminal e Eo(t) é a tensão refletida no secundário da
indutância mutua.
Figura 19 - Circuito equivalente da bobina de Rogowski.
is(t) Rs
i(t)
M
Ls
Cs
Eo(t)
Zc Vo(t)
Através da lei de Kirchoff obtêm-se as equações (19) e (20) para o circuito equivalente
da Figura 19.
(19)
(20)
Substituindo as equações (19) e (20) na equação (18) encontra-se à equação (21).
(
)
(
)
(21)
Considerando as condições iniciais nulas e aplicando a Transformada de Laplace na
equação (21), encontra-se a equação (22).
(
)
(
)
(22)
Onde: s – variável complexa no domínio da frequência.
A partir da equação (22) definisse a função de transferência G(s) da bobina de
Rogowski que é representada pela equação (23).
40
(23)
(
)
(
)
Existem dois tipos de bobinas de Rogowski, as flexíveis e as rígidas (Figura 20). A
bobina flexível pode ser fechada ao redor do condutor que se deseja medir por meio da união
de seus extremos, este tipo de construção permite a medição de condutores largos e de difícil
acesso sem ter que desconectar o condutor. Já a bobina rígida é indicada para medições de
grande precisão e para ser instalada de forma permanente. A indutância mutua da bobina
rígida é maior que a flexível e assim sua tensão de saída também é mais elevada (HIGASHI,
2006).
Figura 20 - (a) bobina flexível fabricada pela LEM©, (b) Bobina rígida instalada em linha de transmissão.
Fonte: (a) www.lem.com; (b) Istituto Elettrotecnico Nazionale Galileo Ferraris.
A bobina de Rogowski possui algumas vantagens em relação ao TC convencional. A
mais importante é que ela não possui núcleo ferromagnético e assim não haverá perdas no
ferro (correntes de Foucault e histerese). Ainda devido à ausência de um núcleo
ferromagnético a bobina não irá saturar, proporcionando uma resposta linear para todos os
pontos de medição do sensor. Contudo, a não utilização de um núcleo magnético faz com que
não haja uma concentração do fluxo magnético em um determinado caminho, deixando a
bobina mais vulnerável às interferências eletromagnéticas, tal problema é solucionado com a
utilização de uma blindagem eletromagnética. Em relação à segurança, diferentemente do TC,
que precisa que seu secundário esteja sempre conectado a uma baixa impedância, a fim de
41
evitar o surgimento sobretensões, na bobina de Rogowski o enrolamento secundário pode
estar em aberto ou conectado a uma alta impedância (ALMEIDA, et al., 2007).
A bobina de Rogowski também possui uma boa resposta em altas frequências,
possibilitando a medição de transitórios de corrente, capacidade de medição de grandes
magnitudes de corrente, um baixo consumo, isolamento galvânico e uma baixa variação da
tensão de saída com temperatura (HIGASHI, 2006).
Devido a essas qualidades o sensor de corrente que será utilizado no medidor é a
bobina de Rogowski flexível da fabricante Prosys, modelo ACF 3000, onde as características
elétricas são mostradas na Tabela 2.
Tabela 2 - Características bobina de Rogowski ACF 3000.
±1% (45 – 65Hz)
< ±1º (45 – 65Hz)
10Hz a 20kHz
1000VAC (eficaz)
±0,2%
Precisão
Deslocamento de fase
Faixa de frequência (-1dB)
Tensão máxima
Linearidade
O circuito que será utilizado como integrador para a aquisição de corrente é mostrado
na Figura 21.
Figura 21 - Integrador utilizado para aquisição de corrente.
Rf
C
Vi(t)
R1
Vo(t)
+
Na equação (24) representa o ganho (Avf) do integrador utilizado no circuito de
condicionamento da bobina de Rogowski.
⁄
√
(24)
42
Constata-se que o ganho irá estabilizar em um valor igual a Rf/R1 quando a frequência
é nula. Este circuito apresenta um comportamento dual, ou seja, em altas frequências o
mesmo trabalha como integrador e em baixas frequências como inversor. Desta forma, devese definir uma frequência limite (fL) abaixo da qual temos um amplificador inversor de ganho
- Rf/R1 e acima da qual temos um integrador (JÚNIOR, 2007). Essa frequência é dada pela
equação (25).
(25)
Para uma frequência fi do sinal aplicado a entrada, temos:
Tabela 3 - Relação frequência limite (fL) e a frequência de entrada fi.
Se fi < fL
O circuito tende a atuar como amplificador inversor
Se fi > fL
O circuito tende a atuar como integrador
Desta forma, quanto menor for a frequência limite (fL) em relação ao sinal de entrada
melhor será o comportamento do integrador. Como a Bobina de Rogowski apresenta uma
banda de frequência passante entre 10Hz a 20kHz, calculou-se a resistência Rf e o capacitor C
para uma frequência menor que 10Hz, obtendo-se: Rf = 1,2MΩ e C=47nF.
Como o integrador possui um ganho inversor é necessário utilizar um circuito inversor
para deixar o sinal de entrada igual ao sinal real medido. Optou-se pela utilização de um
circuito amplificador inversor mostrado na Figura 22 com ganho unitário (equação 26).
Figura 22 - Circuito de inversor e amplificador utilizado.
Ra
Vo(t)
Rb
+
Vi(t)
43
(26)
Entretanto, com a utilização do circuito integrador que possui um ganho elevado,
ocorreu também uma amplificação no sinal de offset do amplificador operacional. O problema
foi solucionado com a inclusão de um filtro passivo passa-baixas de frequência de corte igual
a 1Hz, o cálculo da resistência e do capacitor foi realizado através da equação (23), obtendose: R = 220kΩ e C=560uF.
4.2. Sensores de tensão
Dentre os sensores de medição de tensão pode-se destacar: o divisor resistivo,
transformador de potencial e o transdutor de Efeito Hall.
4.2.1. Divisor resistivo
Um divisor resistivo nada mais é do que uma associação em série de resistores para
que a tensão aplicada à entrada do circuito seja dividida entre as componentes do circuito
resultando na saída uma tensão apropriada à entrada do dispositivo de medição.
Na Figura 23 é mostrado o esquema de um divisor resistivo, onde a tensão de entrada
(Vin) é aplicada ao resistor “R1” que possui um valor de resistência maior que de “R2”, logo
fica com a maior parte da tensão. Desta forma, o resistor “R2” fica com a menor parcela da
tensão e assim a tensão de saída (Vout) tornasse adequada para o conversor A/D.
Figura 23 - Divisor resistivo.
Vi
R1
Vo
R2
A função de transferência do divisor resistivo é representada pela equação (27).
44
(27)
O divisor resistivo possui como vantagem o baixo custo. Deve-se salientar que é
necessário utilizar resistores de alta precisão para ocorrer o menor erro nas medições. Uma
desvantagem é que pode ocorrer problema na isolação elétrica do sistema de medição devido
a altas tensões.
4.2.2. Transformador de potencial
O transformador de potencial (TP) é um transformador para instrumentação para
compatibilizar os valores de tensão com as faixas de operação de um medidor ou instrumento.
Se construído com uma relação de espiras (enrolamentos) de N1:N2, um transformador ideal
de potencial teria uma tensão de secundário (V2) igual ao valor de N2/N1 vezes a tensão do
primário (V1) e de mesma fase. Por isso o TP é projetado para que na prática funcione o mais
próximo possível do ideal, como é mostrado na Figura 24 (FITZGERALD, et al., 1975).
Figura 24 - TP ideal
A função de transferência do TP é representada pela equação (28).
(28)
O TP possui como vantagem o isolamento elétrico entre os enrolamentos do primário
(N1) e o secundário (N2). Assim como os TCs, o TP pode introduzir um deslocamento de fase
entre a tensão e a corrente, que também proporciona erros no cálculo da potência ativa e
reativa, e consequentemente erro no cálculo do fator de potência.
45
4.2.3. Sensor de efeito Hall de tensão
O sensor de tensão de efeito Hall possui o mesmo princípio do sensor de corrente
baseado no efeito Hall apresentado anteriormente. A tensão de saída do transdutor varia
conforme a variação do campo magnético.
O sensor utilizado neste trabalho LEM© LV 25-P (Figura 25), que suporta uma tensão
de entrada alternada ou continua de até 500 Volts, possui isolamento galvânico entre o
circuito primário e o circuito secundário, linearidade, excelente precisão e imunidade a
interferências externas (LEM, 2013). As características principais do sensor de tensão LV 20P são apresentadas na Tabela 4.
Tabela 4 - Características do sensor de tensão LV 25-P.
Precisão
Linearidade
Corrente nominal entrada (RMS)
Corrente máxima de entrada (RMS)
Corrente de saída (RMS)
Relação de transformação
Tensão de alimentação
±0,8%
< 0,2%
10mA
14mA
25mA
2500:1000
±12V
Figura 25 - LV 25-P
Fonte: http://www.lem.com
Na Figura 26 é mostrado o esquema elétrico do LV 25-P ligado à rede elétrica.
46
Figura 26 - Esquema elétrico do sensor e a ligação à rede elétrica.
Fonte: Adaptado (LEM, 2013)
Para o dimensionamento correto das resistências “R1” e “RM” deve-se analisar as
correntes de entrada e a tensão de entrada do A/D. O funcionamento ótimo do sensor depende
do valor eficaz da corrente nominal (Ipnom=10mA). Considerando que se deseja medir uma
elevação de tensão de até 460V, a resistência R1 foi dimensionada pela equação (29).
(29)
Sabendo que a resistência interna (Ri) do sensor é de 250Ω, então a corrente máxima
(Ipmax) que passa no primário do sensor de Efeito Hall é igual a 9,735mA (equação 30).
(30)
A corrente refletida ao secundário do sensor é dada pela equação (31).
(31)
A potência mínima (Pm) do resistor “R1” é calculada através da equação (32).
(32)
47
O resistor “RM” é dimensionado pela equação (33), onde VM é a tensão máxima de
entrada do conversor A/D.
(33)
√
4.3. Amostragem e filtro anti-aliasing
O número de amostras que o microcontrolador deve realizar é calculado através da
Teoria da Amostragem (Teorema de Nyquist). Esta teoria nos diz que para ser realizada uma
discretização (conversão do sinal no tempo continuo para o discreto) do sinal é preciso ter
pelo menos uma frequência de amostragem duas vezes maior que a frequência do sinal a ser
medido (LATHI, 2007). Para medir todas as distorções de corrente e tensão é necessário
representar os sinais no mínimo até a 25ª ordem harmônica (ANEEL, 2012), como no Brasil o
padrão da frequência da rede é de 60 Hz, temos que a frequência dos sinais a serem medidos é
de 1500 Hz. Portanto, a frequência de amostragem deve ser maior que 3000 Hz. Para o
projeto foi definido uma amostragem de 4096 Hz.
Após a definição da frequência de amostragem, pode-se projetar o filtro anti-aliasing,
que é circuito passa-baixas com a finalidade de filtrar frequências maiores que a metade da
frequência de amostragem (2048 Hz) e evitar a sobreposição espectral e erro de aquisição
devido a distorções, interferências e ruídos presentes no sinal medido (LATHI, 2007).
48
5. DESENVOLVIMENTO PRÁTICO
Neste capítulo são mostrados os circuitos que compõem o sistema de medição.
Também será esclarecido o desenvolvimento do software embarcado desenvolvido no
microcontrolador para os cálculos das grandezas elétricas, além do software supervisório e do
protótipo concretizado.
5.1. Circuitos Principais
5.1.1. MSP430F47197
Na Figura 27 é mostrado o diagrama de ligação do MSP430F47197. O
microcontrolador é alimentado por uma tensão de 3,3Volts (pinos 92 e 67) e são utilizados
cristais de 16MHz e 32768Hz para as frequências de operação do mesmo. Para comunicação
serial usa-se os pinos 85 e 84 e os canais A/D são os pinos 1 ao 18.
Figura 27 - Diagrama de ligação do MSP430F47197.
Fonte: Adaptado (TEXAS INSTRUMENTS, 2012).
49
5.1.2. Circuito de aquisição
Na Figura 28 é mostrado o circuito de aquisição de corrente implementado, onde
foram utilizados diodos 1N4148 para proteção contra sobretensões provocadas por um curtocircuito no sistema que a Bobina de Rogowski é instalada.
Figura 28 - Circuito de aquisição de corrente.
Na Figura 29 é mostrado o circuito de aquisição de tensão desenvolvido com o
LV25P.
Figura 29 - Circuito de aquisição de tensão.
5.1.3. Comunicação serial – RS-232
Os dados são enviados para um microcomputador que possui o software supervisório
através de uma comunicação serial. A comunicação serial foi escolhida por ser a única
50
comunicação
presente
no
microcontrolador
MSP430F47197
compatível
com
microcomputador e pela fácil implementação na plataforma Visual Studio. As configurações
da porta serial definidas para o protótipo são mostradas na Tabela 5.
Tabela 5 - Configurações da comunicação serial.
Bits por segundo
Bits de dados
Paridade
Bits de paridade
Controle de fluxo
115200 bauds
8
Nenhum
1
Nenhum
Para o nível de tensão da porta serial do microcomputador ser compatível com o nível
de tensão do microcontrolador foi utilizado o circuito integrado MAX232, produzido pela
empresa Maxim Integrated, seu esquema de ligação é mostrado na Figura 30.
Figura 30 - Esquema de ligação da porta serial.
5.2. Circuitos auxiliares
5.2.1. EEPROM externa
Foi
utilizada
uma
EEPROM
(Electrically-Erasable Programmable Read-
Only Memory) externa do tipo 24C02 que possui 256 bytes de armazenamento para
armazenamento de dados. Para a interface do microcontrolador coma EEPROM é utilizada a
51
comunicação I2C (Inter Integrated Comunication), esta comunicação é um protocolo síncrono
a dois fios do tipo mestre-escravo, seu esquema de ligação é mostrado na Figura 31.
Figura 31 - Esquema de ligação do EEPROM externa.
5.2.2. Fonte
Na Figura 32 é mostrado a fonte utilizada no protótipo, gerando tensão de ±12V para
alimentação dos amplificadores operacionais e para os sensor de tensão LV25-P, +5V para a
alimentação do LCD 16x2 e +3,3V para o MSP 430f47197.
Figura 32 - Fonte de 3,3V, 5V, ±12V.
52
5.2.3. LCD - Liquid Crystal Display
Na Figura 33 é mostrado o esquema de ligação do display LCD 16x2 utilizado para
exibição das medições.
Figura 33 - LCD 16x2.
5.3. Software embarcado
A Figura 34 representa o diagrama de blocos do algoritmo desenvolvido para a
realização dos cálculos no microcontrolador das grandezas elétricas. Inicialmente é
configurado os 6 canais A/D no modo simultâneo e com uma frequência de amostragem de
por canal 4096Hz. Em seguida é configurando um dos timers do microcontrolador em 1
segundo para a realização dos cálculos das medições das grandezas a partir do somatório
acumulado das amostras de tensão e corrente, além do produto entre elas para se obter a
potência ativa acumulada (APENDICE A). Já para a medição de energia utilizou-se a função
Real-Time Clock interna do MSP430 para a medição do tempo. Posteriormente, tais grandezas
são exibidas no display LCD e enviadas para o software supervisório. Após isso o somatório
das amostras é zerado e o ciclo recomeça.
53
Figura 34 - Diagrama de blocos dos cálculos das grandezas elétricas e envio para serial e para o LCD.
Início
Somatório das
amostras dos 6
canais da conversão
A/D
1 segundo (4096
amostras)
N
S
Cálculos RMS,
potência ativa,
reativa, fator de
potência
Cálculos de valores
médios das
potências ativa e
reativa
Cálculo do consumo
de energia ativa e
reativa
Atualização LCD e
envia medições pela
serial
Zera somatório
A variação de tensão são desvios significativos no valor eficaz da tensão em curtos ou
longos intervalos de tempo. Assim, utilizasse o método do cálculo do valor RMS a cada ciclo
da onda senoidal da rede elétrica para identificar estes distúrbios. Mesmo que este método não
seja capaz de detectar transitórios, ele será utilizado no projeto por utilizar reduzidos recursos
54
computacionais. O diagrama de blocos do algoritmo de identificação dos distúrbios de tensão
é mostrado na Figura 35.
Figura 35 - Diagrama de blocos da identificação de distúrbios de tensão.
Início
Somatório das
amostras dos 6
canais da
conversão A/D
16,66 ms (68
amostras)
N
S
Cálculos RMS de
um ciclo das
tensões A, B e C
Tensão RMS
>1,1pu
S
Elevação de
tensão
N
Tensão RMS
<0,9pu
S
Afundamento
de tensão
S
Interrupção de
tensão
Armazena em um
vetor o número de
ciclos, hora e a data
de inicio de cada
distúrbio
Armazena o
vetor em uma
EEPRON externa
e envia dados
pela serial
N
Tensão RMS
<0,1pu
N
Zera somatório
Na Figura 36 é mostrado um sinal senoidal e seu respectivo valor RMS, que ilustra
como é feita a identificação dos distúrbios de tensão.
55
Figura 36 - Sinal senoidal e seu respectivo valor RMS.
O diagnóstico do sentido do fluxo de potência ativa para a identificação de uma fonte
geradora ou consumidora é realizada através da analise do sinal negativo ou positivo das
medições de potência ativa a cada integração discreta (equação (6)).
5.4. Software supervisório
Para uma melhor visualização das medições realizadas pelo medidor foi desenvolvido
um software de gerenciamento que permite a visualização e o armazenamento de todos os
dados. A linguagem de programação utilizada neste software foi C# (C-Sharp), própria da
plataforma Visual Studio .Net desenvolvido pela empresa Microsoft (MUKHI, et al., 2002).
A tela do programa é mostrada na Figura 37, apresentando uma interface gráfica para
análise dos parâmetros medidos pelo tempo. As medições instantâneas das grandezas elétricas
são atualizadas cada 1 segundo, devido ao tempo de integração empregado para o cálculo das
mesmas no microcontrolador. Nas caixas de texto é mostrado o tipo, a duração e quando
ocorreu um distúrbio de tensão.
56
Figura 37 - Tela do software supervisório.
5.5. Protótipo
Na Figura 38 é mostrado o protótipo do sistema de medição de grandezas elétricas
trifásicas. As placas da fonte, de aquisição e do microcontrolador foram montadas em uma
caixa com tampa com grau de proteção IP656, possuindo um display LCD 16x2 na parte
superior, um conector DB9 para a comunicação serial, entrada para medição de corrente
trifásica mais a de neutro e três conectores jacaré para a medição de tensão.
6
Graus de proteção para invólucros de equipamentos elétricos, onde IP indica um código numerico, que
neste caso é o 65 (o número 6 indica que é totalmente protegido contra poeira e o 5 indica proteção contra jatos
d'água).
57
Figura 38 - Foto protótipo do medidor de grandezas elétricas.
58
6. RESULTADOS E DISCUSSÃO
De modo a validar o protótipo foram realizados testes com o circuito de aquisição de
corrente, com a variação da frequência do sinal de corrente e também para a verificação da
linearidade do sensor. Ainda foram realizados testes de confiabilidade dos valores medidos a
partir do protótipo, onde foi utilizado o analisador de qualidade de energia produzido pela
empresa DRANETZ© do modelo PowerGuide 4400 para comparar as medições. Por fim, é
apresentado os resultados obtidos com o protótipo instalado na subestação subterrânea.
6.1. Teste do circuito de aquisição de corrente
A seguir são mostrados os resultados obtidos através dos ensaios do sinal de saída do
circuito de aquisição de corrente. Através de uma fonte de frequência variável alterou-se a
faixa de frequência da corrente de 60Hz à 4999Hz, onde o sinal foi comparado com o sinal de
saída de um resistor shunt de 1Ω. Os sinais não apresentaram atraso de fase até a frequência
de 1490Hz, validando o circuito de aquisição, projetado para medir até a 25ª harmônica. Em
frequências maiores que 1500Hz a forma de onda de saída apresentou um ruído e um atraso
de fase de cerca de 4º.
Na Figura 39 são apresentadas as formas de onda provenientes do circuito de
aquisição de corrente (verde) e do resistor shunt (amarelo) com uma corrente de entrada de
60Hz. Onde o atraso de fase entre os sinais ficou próximo de 0º.
59
Figura 39 - Rogowski (verde) e resistor shunt (amarelo) - 60Hz - 0º.
Na Figura 40 são apresentadas as formas de onda provenientes do circuito de
aquisição de corrente (verde) e do resistor shunt (amarelo) com uma corrente de entrada de
781Hz. Onde o atraso de fase entre os sinais também ficou próximo de 0º.
Figura 40 - Rogowski (verde) e Resistor shunt (amarelo) - 781Hz - 0º.
60
Na Figura 41 são apresentadas as formas de onda provenientes do circuito de
aquisição de corrente (verde) e do resistor shunt (amarelo) com uma corrente de entrada de
1,49kHz. Onde o atraso de fase entre os sinais também ficou próximo de 0º.
Figura 41 - Rogowski (verde) e Resistor shunt (amarelo) - 1490Hz - 0º.
Na Figura 42 são mostradas as formas de onda provenientes do circuito de aquisição
de corrente (verde) e do resistor shunt (amarelo) com uma corrente de entrada de 2,94kHz.
Onde o atraso de fase entre os sinais também foi de 3º e o sinal começou apresentar ruído.
Figura 42 - Rogowski (verde) e Resistor shunt (amarelo) - 2940Hz - 0º.
61
Na Figura 43 e na Figura 44 são apresentadas as formas de onda provenientes do
circuito de aquisição de corrente (verde) e do resistor shunt (amarelo) com uma corrente de
entrada de frequência de 4180Hz e 4999Hz. Onde o atraso de fase entre os sinais ficou
próximo de 4º e com ruído mais elevado.
Figura 43 - Rogowski (verde) e Resistor shunt (amarelo) - 4180Hz - 4º.
Figura 44 - Rogowski (verde) e Resistor shunt (amarelo) - 4999Hz - 2º.
Na Tabela 6 é mostrada a relação entre a corrente de entrada do circuito de aquisição
de corrente e a saída em tensão, tal relação se mostrou linear (Figura 45), considerando a
interferência e o erro de medição de pequenos sinais do próprio osciloscópio. A média da
62
relação entre a corrente de entrada e a tensão é 155,8, sendo esse o valor do ganho do sensor
de corrente. Com esse valor pode-se medir uma corrente eficaz de até 66A, pois o A/D do
MSP430F47197 pode medir até 600mV.
Tabela 6 - Relação entre a corrente de entrada e a saída em tensão do circuito de aquisição.
Corrente de entrada
0,5ª
0,6ª
0,7ª
0,8ª
0,9ª
1,0A
1,1ª
1,2ª
1,5ª
2,0A
3,0A
Média
Tensão de saída
Ganho
3,220mV
3,870mV
4,498mV
5,101mV
5,802mV
6,450mV
7,080mV
7,750mV
9,570mV
12,740mV
19,096mV
155,28
155,00
155,60
156,90
155,20
155,00
155,40
154,80
156,70
157,00
157,10
155,80
Figura 45 - Relação entre a corrente de entrada e a tensão de saída.
63
6.2. Teste das medições
Para validar o protótipo as medições foram comparadas com o analisador de QEE
DRANETZ© do modelo PowerGuide 4400. Na Tabela 7 são mostradas as medições de tensão
RMS, com erro médio de 0,2547% em comparação com o Drannetz.
Tabela 7 - Tensão RMS.
Protótipo
10,07V
30,12V
50,09V
70,07V
100,36V
150,38V
201,05V
Drannetz
10,02V
30,01V
50,02V
69,96V
100,03V
150,13V
200,77V
Erro
0,49%
0,36%
0,14%
0,16%
0,33%
0,17%
0,14%
Na Tabela 8 são mostradas as medições de corrente, que apresentaram erro médio de
1,01%.
Tabela 8 - Corrente RMS.
Protótipo
0,313A
0,505A
0,750A
0,940A
1,131A
2,102A
3,070A
Drannetz
0,310A
0,501A
0,745A
0,930A
1,123A
2,081A
3,010A
Erro
1,090%
1,000%
1,000%
1,075%
0,712%
0,913%
1,320%
Na Tabela 9 são mostradas as medições de potência aparente, potência ativa e fator de
potência de um motor de indução de 1CV trabalhando a vazio.
Tabela 9 - Carga - motor de indução de 1CV trabalhando a vazio.
Potência Aparente (VA)
Potência ativa (W)
Fator de potência
Protótipo Drannetz Erro Protótipo Drannetz Erro Protótipo Drannetz
Erro
8,18VA 8,06VA 1,50% 5,10W
5,05W 0,99%
0,65
0,630
3,17%
12,43VA 12,3VA 1,10% 5,99W
5,9W
1,50%
0,50
0,487
2,67%
15,38VA 15,08VA 1,13% 6,01W
5,91W 1,50%
0,41
0,396
3,50%
17,60VA 17,4VA 1,21% 5,79W
5,7W
1,57%
0,33
0,320
3,10%
20,29VA 20,11VA 0,90% 5,94W
5,83W 1,80%
0,32
0,309
3,50%
29,07VA 28,7VA 1,28% 6,30W
6,22W 1,28%
0,23
0,220
4,50%
30,66VA 30,3VA 1,18% 6,21W
6,1W
1,80%
0,21
0,203
3,44%
64
40,19VA 39,74VA
52,22VA 51,63VA
82,50VA 81,65VA
Média:
1,13%
1,14%
1,01%
1,16%
6,73W
6,62W
7,39W
7,32W
7,59W
7,5W
Média:
1,66%
0,95%
1,20%
1,4%
0,18
0,166
0,157
0,149
0,097
0,094
Média:
3,43%
5,36%
3,19%
3,58%
6.3. Software e identificação de distúrbios de tensão
Na Figura 46 é mostrado o software desenvolvido em funcionamento, onde é possível
testar o algoritmo de identificação de distúrbios de tensão, que são exibidos nas caixas de
texto do programa, mostrando um afundamento de tensão de 3,4 segundos e uma elevação de
tensão de 3,2 segundos nas três fases. Esses distúrbios foram feitos através de uma fonte
trifásica controlável.
Figura 46 - Software supervisório em funcionamento.
65
6.4. Teste de campo
Nesta seção é mostrado o protótipo que foi instalado na subestação subterrânea de
distribuição da CEEE na região metropolitana de Porto Alegre, que possui tensões primárias
de 13,8kV e tensões secundárias de 127/220V e com um transformador de 500kVA. O
protótipo foi instalado junto ao transmissor PLC.
Figura 47 - Localização do transmissor PLC e do receptor/transmissor de sinal GSM.
Fonte: (GIACOMINI, et al., 2012)
Na Figura 48 é mostrado o protótipo do medidor de corrente que foi instalado na
subestação.
Figura 48 - (A) Placa de aquisição e o MSP430F47197; (B) Placa - comunicação CAN e módulo TRF-24G.
66
Na Figura 49 é mostrada a instalação da Bobina de Rogowski nos cabos de média
tensão no primário do transformador.
Figura 49 - Bobinas de Rogowski instaladas nos cabos isolados 15kV do primário do transformador.
O protótipo foi instalado na parede da subestação subterrânea, conforme a Figura 50.
Figura 50 - Caixa do protótipo instalada na parede da subestação.
67
Na Figura 51 e na Figura 52 são apresentados os gráficos das medições de corrente da
fase A do transformador de 500KVA nos dias 04 de dezembro de 2012 e no dia 01 de junho
de 2013, num intervalo de tempo de 2 horas. Os gráficos são gerados a partir de um servidor7
utilizado como banco de dados das grandezas monitoradas da subestação.
Figura 51 - Gráfico dos valores medidos - Corrente primária A – dia 04/12/2012.
Fonte: http://ceee2.unijui.edu.br/
Figura 52 - Gráfico dos valores medidos - Corrente primária A – dia 01/06/2013.
Fonte: http://ceee2.unijui.edu.br/
7
Sistema de computação centralizado, que neste caso foi utilizado para armazenar as medições das
grandezas da subestação recebidas pelo receptor GSM instalado no laboratório.
68
7. CONSIDERAÇÕES FINAIS
A análise da qualidade de energia elétrica é considerada indispensável para garantir o
funcionamento adequado de todo o Sistema Elétrico. Este estudo possibilita detectar as falhas
e tomar medidas preventivas que possam prevenir os efeitos nefastos provocados pelas
perturbações que prejudicam os equipamentos elétricos e assim prolongando a vida útil dos
mesmos.
Neste sentido, o objetivo deste trabalho foi desenvolver um equipamento de medição
de grandezas elétricas de baixo custo, fácil instalação e que envie as medições para um
sistema de armazenamento de dados e desta forma possibilitar a análise do comportamento do
Sistema Elétrico.
A Bobina de Rogowski mostrou-se um sensor de corrente bastante eficaz, possuindo
diversas vantagens em relação aos demais sensores encontrados no mercado, como por
exemplo, isolação galvânica, boa resposta em altas frequências (medição de transitórios), não
possui núcleo ferromagnético, resposta linear, capacidade de medição de grandes magnitudes
de corrente e é segura, diferentemente do TC que pode proporcionar acidentes caso seu
secundário fique em aberto. Além da fácil instalação sem interferir no sistema que é
conectada.
Uma forma de diminuir o custo da Bobina de Rogowski foi a aquisição apenas do
sensor, sem seu circuito de aquisição e assim projetar o circuito integrador, que se mostrou
eficiente em relação a altas frequências e a linearidade, desta forma reduziu-se o custo em
cerca 70%.
Assim como a Bobina de Rogowski, o sensor de efeito Hall possui isolação galvânica
e boa resposta em altas frequências, mas é um sensor relativamente caro, dependendo das
necessidades o divisor resistivo pode ser utilizado como alternativa eficiente e de menor
custo.
O
microcontrolador
MSP430F47197
atendeu
as
necessidades
do
projeto,
principalmente por possuir um A/D de 16 bits, amostras simultâneas dos canais A/D e por
possuir a função Hardware Multiplier.
Os algoritmos embarcados no microcontrolador para o cálculo das grandezas elétricas
foram validados através da comparação com o analisador de energia DRANETZ© do modelo
PowerGuide 4400. Já o algoritmo para identificação dos distúrbios de tensão funcionou de
maneira satisfatória, mas mesmo sendo um dos métodos que consomem menos
processamento do microcontrolador, constatou-se que a sua utilização provocou perdas no
69
número de amostras devido ao elevado tempo de processamento, principalmente por ser
utilizado a cada ciclo e por armazenados os dados em um vetor, que posteriormente é enviado
a memória EEPROM externa e ao software supervisório. Mesmo assim, não comprometeu o
projeto, mas diminuir a exatidão do sistema.
Em relação ao teste de campo, onde o sistema de medição foi instalado
especificamente para as medições da corrente do primário de um transformador de uma
subestação subterrânea da CEEE, pode-se comprovar a eficiência do todo o sistema, já que o
protótipo esta em funcionamento a mais de seis meses sem apresentar problemas.
Como trabalhos futuros sugere-se a utilização de um microcontrolador com maior
nível de processamento, para o desenvolvimento de algoritmos mais sofisticados para analise
de QEE e para a eliminação do uso de um microcomputador, onde o próprio sistema de
medição controlará a interface homem-máquina e armazenará as medições.
70
REFERÊNCIAS BIBLIOGRÁFICAS
ALMEIDA, Álvaro Algusto, et al. Estudo e desenvolvimento de um protótipo de
equipamento de medição baseado na bobina de Rogowski como alternativa aos TCs de
medição convencionais. 2007, p. 7.
ALVES, Mário Fabiano. Tópicos Avançados em Engenharia Elétrica - Qualidade da
Energia Elétrica. PUC. Belo Horizonte : s.n., 2011.
ANEEL, Agência Nacional de Energia Elétrica. Procedimentos de Distribuição de Energia
Elétrica no Sistema Elétrico Nacional - PRODIST - Módulo 1 - Introdução. [Online] 2012.
[Citado
em:
15
de
Fevereiro
de
2013.]
http://www.aneel.gov.br/arquivos/PDF/Modulo1_Revisao_6.pdf.
ANEEL, Agência Nacional de Energia Elétrica. Procedimentos de Distribuição de Energia
Elétrica no Sistema Elétrico Nacional - PRODIST - Módulo 8 - Qualidade da Energia
Elétrica.
[Online]
2012.
[Citado
em:
1
de
Março
de
2013.]
http://www.aneel.gov.br/arquivos/PDF/M%C3%B3dulo8_Revis%C3%A3o_4.pdf.
BOYLESTAD, Robert. Introdução à Análise de Circuitos. 10ª. São Paulo : Pearson
Prentice Hall, 2004.
DELBEN, Guilherme Jurkevicz. Avaliação da resposta da bobina de Rogowski para
aplicação em sensor de descargas elétricas em isoladores. Universidade Federal do Paraná.
Curitiba : s.n., 2008. p. 78, Dissertação de Mestrado.
FALCÃO, Djalma M. Integração de tecnologias para viabilização da Smart Grid.
Simpósio Brasileiro de Sistemas Elétricos. 2010.
FITZGERALD, A. E, Junior, C K e Umans, S D. Máquinas Elétricas. 6ª. São Paulo :
Bookman®, 1975. p. 648.
GIACOMINI, Julian, et al. Monitoramento de uma Subestação Subterrânea de
Distribuição de Energia Elétrica utilizando uma Rede de Sensores Inteligentes Híbrida e
PLC (Power Line Communication). Congresso Brasileiro de Automatica. 2012.
71
GONÇALVES, Armando Albertazzi. Calibração de Sistemas de Medição. Labmetro,
Universidade Federal de Santa Catarina. Florianópolis : s.n., 2006.
GOUNÊA, M R, et al. Desenvolvimento de Padrões para Redes Subterrâneas Híbridas.
Aneel - Agência Nacional de Energia Elétrica. [Online] 2011. [Citado em: 16 de Janeiro de
2013.] www.aneel.gov.br/biblioteca/downloads/livros/desen_redes.pdf.
HIGASHI, Eduardo Massahiko. Modelagem da bobina de Rogowski para medidas de
pulsos de corrente elétrica. Universidade Federal do Paraná. Curitiba : s.n., 2006. p. 82,
Dissertação de Mestrado.
JÚNIOR, A. P. Eletrônica Analógica, Amplificadores Operacionais e Filtros Ativos. 6ª.
s.l. : Bookman®, 2007. p. 308.
LATHI, B. P. Sinais e Sistemas Lineares. 2ª. s.l. : Bookman®, 2007. p. 856.
LEM. Datasheet. Datasheet Catalog. [Online] 2013. [Citado em: 12 de Janeiro de 2013.]
http://www.datasheetcatalog.org/datasheet/lem/LA10-PB.pdf.
LEM. Datasheet. Digikey. [Online] 2013. [Citado em: 3 de Janeiro de 2013.]
http://media.digikey.com/pdf/Data%20Sheets/LEM%20USA%20PDFs/LV%2025-P.pdf.
MATANA, Gleison Melhado. Proposta de Equipamento para Medição dos Fenômenos
Relativos à Qualidade da Energia Elétrica utilizando Conceitos de Instrumentos
Virtuais. Universidade de São Paulo. São Carlos : s.n., 2008. p. 211, Dissertação de
Mestrado.
MUKHI, Vijay, Shanbhag, Sandeep e Mukhi, Sonal. C# - Fundamentos. São Paulo : Makron
Books, 2002. p. 400.
PEREIRA, Fábio. Microcontroladores MSP430 – Teoria e Prática. s.l. : Érica Ltda, 2005.
SANKARAN, C. Power Quality. London : CRC Press LLC, 2002.
SANTOS, Túlio Luiz. Desenvolvimento de um sistema embarcado para medição de
corrente. Universidade Federal de Santa Catarina. Florianópolis : s.n., 2010. p. 102,
Dissertação de Mestrado.
72
TEXAS INSTRUMENTS. Application report SLAA122. Current-Transformer phase-shift
compensation and calibration. [Online] 2001. [Citado em: 2 de Janeiro de 2013.]
http://www.ti.com/lit/an/slaa122/slaa122.pdf.
TEXAS INSTRUMENTS. MSP430x4xx - User's Guide. Texas Instruments. [Online] 2012.
[Citado em: 30 de Janeiro de 2013.] http://www.ti.com/lit/ug/slau056k/slau056k.pdf.
XAVIER, Pedro Eduardo de Almeida. Analisador da qualidade de energia baseado em
DSP. Universidade Técnica de Lisboa. Lisboa : s.n., 2011. p. 130, Dissertação de Mestrado.
73
APENDICE A
Algoritmo desenvolvido para o cálculo da potência ativa em uma fase utilizando as
funções “union” e “struct” da linguagem C e o Hardware Multiplier do MSP430F47197.
union _mem
{
struct _part{
int low:16;
int high:16;
} part;
long int total;
};
// Calculo da Potência Ativa na fase A
union _mem memoria;
MPYS = Va;
// Registrador que carrega o primeiro valor da multiplicação.
OP2 = Ia;
// Registrador que carrega o segundo valor da multiplicação.
memoria.part.low = RESLO;
// Parte menos significativa.
memoria.part.high = RESHI;
// Parte mais significativa.
Pasoma += memoria.total;
// Resultado da multiplicação e somatório
N++;
// Timer B0 interrupt service routine
#pragma vector=TIMERB0_VECTOR // (Timer configurado em 1 segundo)
__interrupt void Timer_B (void)
{
Pa = Pasoma / N;
// número de amostras (N)
...
}
// Potência ativa = somatório dividido pelo