Apresentação
Panorama
Programa
Relação de Títulos
Relação de Autores
Busca de Palavras
SEGMENTAÇÃO DE IMAGENS DE INTENSIDADE GERADA POR
PERFILAMENTO A LASER USANDO TÉCNICAS DE DIVISÃO E FUSÃO
DE REGIÕES
Edinéia Aparecida dos Santos Galvanin1
Aluir Porfírio Dal Poz2
Antonio Juliano Fazan1
Aparecida Doniseti Pires de Souza3
Universidade Estadual Paulista - Faculdade de Ciências e Tecnologia
1
Programa de Pós-Graduação em Ciências Cartográficas
2
Departamento de Cartografia
3
Departamento de Matemática, Estatística e Computação
Rua Roberto Simonsen, 305 - Campus de Presidente Prudente – SP
{edineia, aluir, juliano, adps}@prudente.unesp.br
RESUMO
Este artigo propõe uma metodologia para a segmentação de regiões em imagens de intensidade de retorno de
pulso laser. Esta metodologia baseia-se na utilização conjunta de duas técnicas seqüenciais, sendo uma de divisão
recursiva e outra de fusão de regiões. A etapa inicial de divisão recursiva consiste no particionamento da imagem em
um conjunto de regiões arbitrárias. Essa estratégia consiste então em dividir a imagem em regiões, utilizando um limiar
pré-estabelecido com base em conhecimentos a priori dos objetos presentes na cena. Ao final desse processo de
segmentação é obtida uma imagem dividida em regiões contíguas, mas que pode estar fragmentada devido à
possibilidade de ligeiras diferenças radiométricas na imagem de retorno de pulso laser. Já a etapa fusão de regiões tem
por objetivo unir regiões adjacentes, com características similares, tendo por base critérios estatísticos. Neste caso
verifica-se através de um teste de razão de verossimilhanças se as regiões adjacentes pertencem ou não a um mesmo
objeto. A utilização de critérios estatísticos para a discriminação de regiões de interesse é de suma importância, visto
que estes procedimentos podem fazer com que os objetos existentes na cena sejam segmentados com maior eficiência.
Assim, a solução proposta consiste em aplicar a técnica de divisão recursiva na imagem de intensidade e então aplicar o
processo de fusão de regiões utilizando critérios estatísticos na imagem particionada. Os resultados obtidos permitiram
verificar que a metodologia proposta é apropriada para aplicações envolvendo análise de imagem, pois possibilitou a
obtenção de regiões geralmente relacionadas com objetos urbanos, tais como ruas e edifícios. Especialmente a etapa de
fusão estatística mostrou-se eficiente para a diminuição da fragmentação observada nos resultados gerados pela etapa
inicial de divisão recursiva.
Palavras chaves: Divisão recursiva, Fusão de regiões, Análise de imagem, Perfilamento a laser, Imagem de intensidade.
ABSTRACT
This paper proposes a methodology for region segmentation in laser beam intensity images. This
methodology is based on the use of two sequential techniques, i.e. a recursive splitting and region merging techniques.
The initial stage of recursive splitting consists in partitioning the image in a set of arbitrary regions. This strategy aims
at splitting the image into a set of regions using a pre-defined threshold based on prior knowledge of objects presented
on the scene. At the end of this segmentation process, it is obtained an image subdivided in contiguous regions, but it
might be fragmented due to the possibility of slight radiometric differences on the laser beam intensity image. The stage
of region merging aims at jointing adjacent regions with similar characteristics, using statistical rules. In this case it is
verified through a likelihood ratio test whether adjacent regions belong or not to the same object. The use of statistical
criteria for discrimination of interest regions is very important, because these procedures can allow the segmentation of
the objects in the scene to be more efficient. Thus, the proposed solution consists in applying the recursive splitting
technique to the intensity image and then applying the region merging process using statistical rules to the partitioned
image. The obtained results have showed that the proposed methodology is appropriate for application involving image
analysis, because it has made possible the extraction of regions usually related to urban objects, such as streets and
buildings. Especially the stage of statistical merging has proved to be efficient in the decrease of the fragmentation
observed in the results generated by the initial stage of recursive splitting.
Apresentação
Panorama
Programa
Relação de Títulos
Relação de Autores
Busca de Palavras
Keywords: Recursive splitting, Region merging, Image analysis, Laser scanning, Intensity image
1 INTRODUÇÃO
2 SISTEMA DE PERFILAMENTO A LASER
A segmentação de imagens é o termo usado
em visão computacional para o agrupamento de partes
de uma imagem genérica em unidades que são
homogêneas com respeito a uma ou várias
características (ou atributos), resultando em uma
imagem segmentada (Ballard e Brown, 1982).
A segmentação por regiões é utilizada para
separar os objetos de interesse. Neste caso, a imagem é
particionada em diferentes regiões, ficando cada uma
relacionada a certas características e conjuntos de
pixels conectados. Assim, a partir do particionamento
da imagem, em regiões, podem ser realizadas medidas
sobre cada região e as relações entre as regiões
adjacentes podem ser estabelecidas (Gonzales e
Woods, 2000).
No âmbito de reconhecimento de padrões a
segmentação de imagens é um passo preliminar e
essencial para passos subseqüentes de análise de
imagem. Neste caso, o reconhecimento pode ser
realizado a partir do relacionamento espacial entre os
objetos de interesse presentes na cena.
A estratégia proposta neste trabalho consiste
no particionamento da imagem em um conjunto de
regiões arbitrárias. Ao final desse processo de
segmentação é obtida uma imagem dividida em regiões
contíguas, mas que pode estar fragmentada devido à
possibilidade de ligeiras diferenças radiométricas na
imagem de retorno de pulso laser. Já a etapa de fusão
de regiões tem por objetivo unir regiões adjacentes
com características similares, tendo por base critérios
estatísticos. Neste caso, verifica-se através da razão de
verossimilhanças (Jain et al., 1995) e através de um
teste de razão de verossimilhanças (Larson, 1982) se as
regiões adjacentes pertencem ou não a um mesmo
objeto. A utilização de critérios estatísticos a respeito
das regiões de interesse é de suma importância, visto
que estas informações podem fazer com que os objetos
existentes na cena sejam segmentados com maior
eficiência.
Este artigo está organizado em 6 seções
principais. A seção 2 apresenta algumas características
do sistema de perfilamento a laser. A seção 3 apresenta
os aspectos teóricos da divisão recursiva de regiões. Já
os aspectos teóricos do processo de fusão de regiões
são apresentados na seção 4. Os resultados e análise
são descritos na seção 5 e a seção 6 traz as
considerações finais sobre o trabalho.
Nos últimos anos o uso da tecnologia de
perfilamento a laser tem se tornado foco crescente de
pesquisas. A necessidade de aquisição rápida e eficaz
de dados digitais de elevação do terreno (Modelo
Digital de Elevação - MDE) tem motivado o uso desta
tecnologia.
O sistema de perfilamento a laser é
composto por três componentes principais, sendo eles o
Global Positioning System (GPS), o Inertial
Measurement Unit (IMU) e o sensor LASER. Este
sistema tem como função principal, através da emissão
e recepção de pulsos de LASER, medir a distância
entre o sensor e a superfície do objeto. Com a
integração GPS/IMU, o sistema fornece uma nuvem de
pontos adquirida através das medidas de distância.
Uma característica marcante dos sistemas de
perfilamento a laser é a medição da primeira e da
última reflexão de um mesmo pulso. Alguns sistemas
podem medir diferentes ecos do sinal emitido, refletido
por diferentes objetos dentro da projeção do feixe no
terreno (footprint). É possível medir o primeiro e o
último eco do pulso, ou até medir toda a variação do
eco, se for necessário (Wehr e Lohr, 1999).
Além da informação de altura, as
informações relacionadas com a capacidade de
reflectância
de
determinados
objetos
são
disponibilizadas pelo sistema de perfilamento a laser.
A intensidade de retorno dos pulsos ao sistema pode
ser medida variando de acordo com a superfície
perfilada, isto é, a superfície pode absorver ou refletir
pulsos de forma diferente. Esta característica pode
auxiliar em um processo de segmentação da imagem,
pois os objetos presentes na cena, dependendo de suas
características, possuem respostas diferentes.
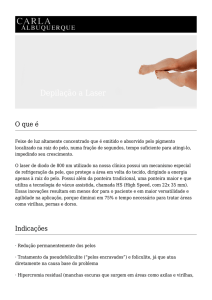
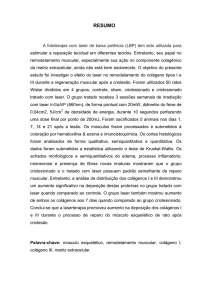
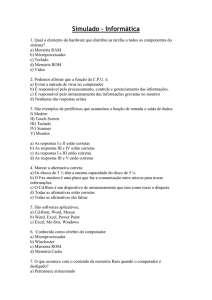
A imagem mostrada na figura 1 é um
exemplo de uma imagem de intensidade obtida usando
a informação de retorno do primeiro pulso do sistema
de perfilamento a laser realizado pelo Instituto de
Tecnologia para o Desenvolvimento (LACTEC).
Apresentação
Panorama
Programa
Relação de Títulos
1
3
Relação de Autores
2
4
(a)
1
2
Busca de Palavras
3
4
(b)
Fig. 1 – Imagem de intensidade obtida a partir do
perfilamento a laser (Fonte: LACTEC).
3 DIVISÃO DE REGIÕES
Uma região em uma imagem é um
agrupamento de pixels conexos com propriedades
similares. Em análise de imagem as regiões são de
suma importância, pois elas correspondem aos objetos
presentes na cena. Uma imagem, por sua vez pode
conter vários objetos e cada objeto pode conter várias
regiões correspondendo a diferentes partes do objeto.
Ao subdividir uma imagem em regiões,
várias decisões devem ser tomadas. No entanto, o
problema está em decidir qual propriedade utilizar na
subdivisão. Essa questão geralmente requer um
conhecimento sobre as características dos objetos
presentes na cena. Em algumas aplicações, a variância
dos valores de intensidade é usada como medida de
dispersão dos valores de cinza de uma determinada
região. Uma abordagem utilizada para subdividir
regiões é a divisão recursiva de regiões, ou métodos de
decomposição regular, neste caso, a representação
quad tree.
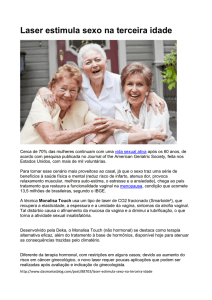
Um quad tree é uma estrutura que permite
dividir recursivamente uma imagem original em subregiões, tendo por base uma propriedade e um limiar
pré-estabelecido. Se a variação dos níveis de cinza de
uma região em análise for maior que o limiar
especificado, essa região é subdividida em outras
quatro regiões e, cada uma das regiões resultantes, são
divididas em outras quatro, seguindo-se recursivamente
até que não seja possível dividir nenhuma região. A
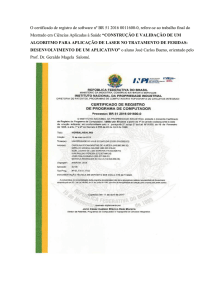
figura 2 mostra a construção de um quad tree a partir
de um exemplo genérico.
(c)
(d)
Fig. 2 – (a) Imagem original. (b) Imagem dividida em
quatro sub-regiões e o quad tree correspondente. (c)
Subdivisão das regiões 1 e 4 em quatro sub-regiões
respectivamente e o quad tree correspondente. (d)
Subdivisão da sub-região 2 em quatro sub-regiões e o
quad tree correspondente (Fonte: Adaptado de Jain et
al., 1995).
A segmentação baseada na divisão recursiva
de regiões é apresentada em Jain et al. (1995). Nesta
abordagem, considera-se R a imagem completa e P
uma propriedade (por exemplo, a variância dos níveis
de cinza). Esta divisão é baseada em um teste de
hipóteses do tipo H 0 : P( Ri ) ≤ σ 02 = λ (onde λ é um
valor pré-estabelecido de acordo com os valores de
intensidade dos objetos presentes na cena) contra a
hipótese H 1 : P( Ri ) > σ 02 . Se H 1 : P ( Ri ) > σ 02
rejeita-se H 0 em favor de H 1 . A segmentação de R
é realizada a partir de sucessivas subdivisões. Assim,
se a hipótese H 1 for verificada, então a imagem é
subdividida em quadrantes cada vez menores. Essa
técnica, em particular, possui uma representação
conveniente denominada quad tree, isto é, uma árvore
em que cada nó possui exatamente quatro
descendentes.
Essa abordagem pode ser sumariada nas
seguintes etapas:
1) Dividi-se a imagem R em quatro quadrantes
distintos;
2) Para cada quadrante calcula-se a variância dos
níveis de cinza;
Apresentação
Panorama
Programa
Relação de Títulos
3) Se P( Ri ) > λ , subdivide-se o referido quadrante em
quatro outros quadrantes.
A segunda e a terceira etapa devem ser
aplicadas recursivamente a todos os quadrantes da
imagem, enquanto P ( R i ) > λ . O processo é finalizado e
o critério de parada ocorre quando P ( Ri ) < λ , ∀ i . Cabe
ressaltar que esse procedimento deve ser aplicado
recursivamente até que não haja mais quadrantes para
serem subdivididos. Assim, o algoritmo é finalizado e
uma estrutura é gerada. Essa estrutura corresponde a
uma imagem segmentada, onde cada Ri é rotulada
com o nível médio de cinza da região correspondente.
3 FUSÃO DE REGIÕES
As regiões obtidas após a aplicação do
algoritmo de divisão recursiva apresentam como
resultado uma imagem com regiões contíguas, mas que
pode estar fragmentada. A principal razão para este
problema é devido à possibilidade de ocorrência, para
um mesmo objeto, de ligeiras diferenças radiométricas
na imagem de retorno de pulso laser. Com o objetivo
de apresentar uma metodologia que forneça regiões
similares geralmente relacionadas com objetos
urbanos, tais como ruas e edifícios, este artigo propõe a
integração entre as técnicas de divisão recursiva e
fusão de regiões.
A técnica de fusão de regiões utilizando
critérios estatísticos proposta por Jain et al. (1995)
considera a utilização de características estatísticas de
duas regiões adjacentes. Essas características são
utilizadas para decidir se as regiões devem ou não ser
fundidas.
O julgamento inicial para a fusão de duas
regiões é realizado considerando duas regiões
adjacentes R1 e R2, com m1 e m2 pixels,
respectivamente. Assim, existem duas hipóteses
possíveis:
H0: Ambas as regiões pertencem ao mesmo
objeto. Neste caso, as intensidades são todas
obtidas a partir de uma única distribuição
gaussiana com parâmetros (µ0 , σ 0 ) ;
H1: As regiões pertencem a objetos diferentes.
Neste caso, as intensidades de cada região são
obtidas a partir de distribuições gaussianas
separadas com parâmetros (µ1, σ1) e (µ2 ,σ 2 ) .
Em geral, esses parâmetros não são
conhecidos, mas são estimados usando amostras. Por
exemplo, quando uma região contém n pixels com
níveis de cinza gi, i = 1,..., n, provenientes de uma
distribuição normal, pode-se escrever:
Relação de Autores
−
1
p ( gi ) =
( gi − µ )2
2σ 2
e
2πσ
Busca de Palavras
(1)
Os estimadores de máxima verossimilhança
( µ̂ , σˆ 2 ) são dados por:
µ̂ =
1
n
n
∑g
(2)
i
i =1
1
n
σˆ 2 =
n
∑ (g
i
− uˆ ) 2
(3)
i =1
Assumindo-se a hipótese H0 e que todas as
intensidades gi são independentemente obtidas de uma
população normal com parâmetros ( µ 0 , σ 0 ) , a função
densidade de probabilidade conjunta sob H0 é dada por
(Jain et al., 1995):
m1 + m 2
p( g1, g 2 ,..., g m1 + m 2 | H 0 ) =
∏ p( g | H
i
0
i =1
=
m1 + m2
∏(
i =1
−
1
2πσ 0
)
( gi − µ0 )2
∑i =11
m + m2
=
−
1
( 2πσ )
( gi − µ0 ) 2
2σ 02
e
m1 + m2
(4)
2σ 02
e
0
A equação 4 avaliada nos estimadores de
máxima verossimilhança, dados pelas equações 2 e 3,
resulta em:
p( g1 , g 2 ,..., g m1+ m 2 | H 0 ) =
(
1
2πσ 0
−
)
m1 + m2
e
( m1 + m2 )
2
(5)
Assumindo agora a hipótese H1 e que m1
pixels pertencentes à região 1 são tomados
independentemente e uma população com parâmetros
( µ1 , σ 1 ) e que outros m2 pixels pertencentes à região 2
são tomados independentemente de uma outra
população normal com parâmetros ( µ 2 , σ 2 ) . Neste
caso, a função densidade de probabilidade conjunta
avaliada nos estimadores de máxima verossimilhança
dados pelas equações 2 e 3, resulta em (Jain et al.,
1995):
p( g1 , g 2 ,..., g m1 , g m1 + 1 ,..., g m1 + m 2 | H 1 ) =
(
1
2πσ 1
)
m1
−
e
m1
2
×
(
1
2πσ 2
)
m2
−
e
m2
2
(6)
.
A razão de verossimilhanças (L) é definida
na equação 7 como a razão entre a densidade conjunta
sob H1 e a densidade conjunta sob H0.
Apresentação
Panorama
Programa
Relação de Títulos
Relação de Autores
Busca de Palavras
m1 + m 2
L=
Os
p( g 1 , g 2 ,... | H 1 ) σ 0
=
p( g 1 , g 2 ,... | H 0 ) σ 1m1 ⋅ σ 2m 2
valores
dos
(7)
parâmetros
σ 0 , σ 1 e σ 2 na equação acima são estimados
utilizando as equações 2 e 3, considerando todos os
pixels (m1 + m2) , sendo m1 pixels da região 1 e m2
pixels da região 2. Neste caso, segundo Jain et al.
(1995), se a razão L é menor que um limiar préestabelecido (k), existe forte evidência de que as duas
regiões que estão sendo analisadas sejam similares e
possam ser fundidas. Segundo Larson (1982), a razão
de verossimilhanças L−1 ≤ k equivale a T ≥ d , onde
t representa o quantil de uma distribuição t-Student
com (m + n – 2) graus de liberdade, onde
t = ( µˆ 1 − µˆ 2 )
m1 m 2
m1 + m 2
∑ (g
i
− µˆ 1 ) 2 +
∑ (g
j
− µˆ 2 ) 2
m1 + m 2 − 2
e
(8)
d = t1−α / 2, m + n − 2 representa o quantil da distribuição t-
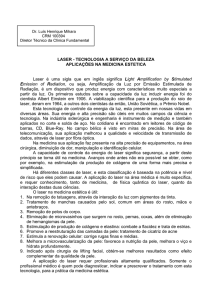
Fig. 4 – Imagem dividida em regiões utilizando a
divisão recursiva via quad tree.
A figura 5 apresenta o resultado obtido com
a aplicação da técnica de fusão de regiões utilizando a
razão de verossimilhança apresentada na equação 7,
com um limiar pré-estabelecido (k = 0,0009).
Student onde a probabilidade de T ≤ d é dada por
1−α .
2
4 RESULTADOS E ANÁLISE
Nesta seção são apresentados alguns
resultados do processo seqüencial de divisão e fusão de
regiões. Foi utilizada uma imagem de intensidade
obtida por perfilamento a laser (figura 3).
Fig. 5 – Resultado da fusão de regiões adjacentes com
características similares, utilizando um limiar fixo.
Fig. 3 – Imagem de intensidade gerada por
perfilamento a laser (Fonte: LACTEC).
A figura 4 mostra o resultado obtido pela
aplicação da técnica de divisão recursiva via quad tree.
O limiar utilizado nesse processo foi mantido fixo
( λ = 25 ).
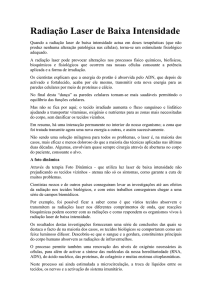
A figura 6 ilustra o resultado obtido
utilizando o teste de razão de verossimilhanças através
da estatística T ilustrada na equação 8, com (m + n – 2)
graus de liberdade e α = 0,05 .
Apresentação
Panorama
Programa
Relação de Títulos
Relação de Autores
Busca de Palavras
Galvanin e ao mestrando Antonio Juliano Fazan. Este
trabalho é também resultado de um projeto financiado
pela FAPESP, na categoria de Auxílio à Pesquisa,
coordenado pelo segundo autor. Este artigo conta
também com apoio do CNPQ, através de bolsa de
produtividade em Pesquisa (PQ) do segundo autor. Os
autores também agradecem ao Instituto de Tecnologia
para o Desenvolvimento (LACTEC) de Curitiba - Pr
pela concessão da imagem de intensidade gerada por
perfilamento a laser utilizada no experimento.
7 REFERÊNCIAS BIBLIOGRÁFICAS
Ballard, D. H.; C.M. Brown, 1982, Computer Vision,
Prentice-Hall, Englewwod Cliffs, New Jersey.
Gonzales, R. C.; R.E. Woods, 2000, Digital Image
Processing, Addison-Weslly publiching company, 716
páginas.
Fig. 6 – Resultado da fusão de regiões adjacentes com
características similares, utilizando um limiar obtido a
partir da distribuição t-Student.
Devido à possibilidade de ligeiras diferenças
radiométricas na imagem de retorno de pulso laser, o
resultado apresentado na figura 4 apresenta regiões
contíguas, frequentemente fragmentadas. A figura 5
mostra uma pequena redução da fragmentação das
regiões obtidas com a técnica de fusão de regiões,
utilizando um limiar pré-estabelecido. Já a figura 6
ilustra uma fusão significativa das regiões com
características similares, utilizando o teste de razão de
verossimilhanças conforme Larson (1982). Neste caso
o limiar é obtido a partir da distribuição t-Student.
5 CONSIDERAÇÕES FINAIS
Neste trabalho foram apresentados os
fundamentos teóricos, algorítmicos e a análise
referente aos processos de divisão recursiva via quad
tree e a fusão de regiões estatisticamente similares
obtidas na etapa de divisão recursiva. Foram descritos
os passos integrantes do processo e apresentado um
experimento efetuado com uma imagem de intensidade
gerada por perfilamento a laser. Dessa forma, as
expectativas teóricas puderam ser verificadas
experimentalmente.
A fusão de regiões estatisticamente similares
mostrou-se capaz de fornecer regiões geralmente
relacionadas com objetos urbanos. Cabe ressaltar que
uma característica desejável do método é a utilização
de limiares fixos, o que viabiliza sua utilização em
etapas posteriores de análise de imagem.
6 AGRADECIMENTOS
Os autores agradecem a CAPES e CNPQ,
pelo suporte, sob a forma de bolsa de Demanda Social,
concedida a doutoranda Edinéia Aparecida dos Santos
Jain, R.; R. Kasturi e B. G. Schunck, 1995, Machine
Vision, MIT Press and McGraw-Hill, Inc New York,
549 páginas.
Larson, H. J., 1982, Introduction to Probability Theory
and Statistical Inference, Publications, Canadá, 637
páginas.
Wehr, A.; U. Lohr, 1999. Airborne Laserscanning-an
Introduction and Overview, ISPRS Journal of
Photogrammetry and Remote Sensing, Vol. 54, p. 6882.