PUC – PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ
CCET – CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA
ENGENHARIA ELÉTRICA - TELECOMUNICAÇÕES
DESENVOLVIMENTO DE SENSORES DETECTORES DE MATERIAIS PARA USO EM
SEPARAÇÃO E RECICLAGEM DE LIXO
CURITIBA
2010
2
EDNEY FERNANDES SCHINZEL
DESENVOLVIMENTO DE SENSORES DETECTORES DE MATERIAIS PARA USO EM
SEPARAÇÃO E RECICLAGEM DE LIXO
Trabalho de Conclusão de Curso
apresentado ao curso de Engenharia
Elétrica com ênfase em Telecomunicações,
da Pontifícia Universidade Católica do
Paraná, como requisito a obtenção do título
de Graduação.
Orientador: Prof. Voldi Costa Zambenedetti
CURITIBA
2010
IV
RESUMO
Neste trabalho, serão apresentados alguns problemas de reciclagem no meio em que
vivemos, procurando justificar o motivo deste projeto. Será demonstrado o quanto, dos
principais materiais recicláveis, é consumido e reciclado no Brasil e o quanto de margem
ainda tem para melhorar, procurando conscientizar as pessoas a separarem o lixo, e de forma
eficiente, em suas corretas lixeiras, procurando conciliar o desenvolvimento econômico com a
preservação ambiental.
O projeto realizado e descrito neste trabalho, tem o intuito de detectar e identificar,
pelo acionamento de diodos emissores de luz, diferentes tipos de materiais como metal, vidro,
plástico e papel, que descartamos diariamente, para uma futura separação do lixo. Para a
detecção do diferentes tipos de materiais é utilizado uma lixeira, onde nela é instalado um
sensor detector de metais, para a identificação de materiais metálicos, e sensores de barreira
óticos infravermelhos, responsável por identificar os outros tipos de materiais como, vidro,
plástico e papel. Uma base teórica a respeito dos campos magnéticos e do espectro de
frequência da luz infravermelha será apresentada a fim de entender melhor como funcionam
os sensores utilizados. Também serão demonstrados os métodos como os sensores foram
construídos e como cada um deles funciona neste projeto. Testes empíricos, para demonstrar
como os materiais se comportam perante os sensores, e testes de validação, a fim de
demonstrar a eficiência dos sensores, também foram realizados e serão apresentados no
conteúdo desta apresentação.
Palavras-chave: Reciclagem. Separação do lixo. Sensores de materiais. Detector de metais.
Sensor infravermelho.
V
ABSTRACT
In this work, will be presented some recycling problems in the environment where we
live in, trying to justify the reason of this project. It will be shown how much, the main
recyclable materials, is recycled and consumed in Brazil and how much of margin has still to
improve, trying to educate people to separate the garbage, and efficiently, in their correct
garbage can, trying to reconcile economic development with environmental preservation.
The project realized and described in this work, aims to detect and identify, by the
actuation of the light emitter diodes, different types of materials such as metal, glass, plastic
and paper, we discard daily, for a future garbage separation. For detection of different
materials types it is used a garbage can, where in it is installed a metal detector sensor, for the
identification of metallic materials and infrared optical sensors barrier, responsible for
identifying other types of materials such as glass, plastic and paper. A theoric base about
magnetic fields and the frequency spectrum of the infrared light will be presented in order to
better understand how the sensors work. Methods will be showcased as the sensors were built
and how each one works on this project. Empirical tests, to demonstrate how the materials
behave before the sensors, and the validation tests, in order to demonstrate the efficiency of
the sensors were also realized and will be presented in this presentation.
Key-words: Recycling. Garbage separation. Materials sensors. Metals detector. Infrared
sensor.
VI
LISTA DE DIAGRAMAS
Diagrama 1 - Diagrama de nível do detector de metais ........................................................................ 36
Diagrama 2 - Digrama de nível para o sensor infravermelho ............................................................... 36
2
LISTA DE FIGURAS
Figura 1- Símbolo internacional da reciclagem .................................................................................... 12
Figura 2 – Símbolos dos materiais recicláveis, orgânicos e outros ....................................................... 13
Figura 3 - Lixeiras falantes para deficientes visuais ............................................................................. 15
Figura 4 - Espectro magnético .............................................................................................................. 16
Figura 5 - Limalhas mostrando as linhas de campo de uma bobina energizada. .................................. 17
Figura 6 - Linhas de campo de um solenóide........................................................................................ 17
Figura 7 - Espectro eletromagnético ..................................................................................................... 19
Figura 8 - Comprimentos de onda ......................................................................................................... 19
Figura 9 – Esquemático do circuito detector de metais......................................................................... 24
Figura 10 – Esquemático do sensor transmissor infravermelho............................................................ 27
Figura 11 - Esquemático de ligação do fototransístor ........................................................................... 28
Figura 12 - Vista superior da lixeira com visão dos sensores infravermelhos ...................................... 32
Figura 13 - Fluxograma de funcionamento do projeto .......................................................................... 42
Figura 14 - Esquemático completo do hardware ................................................................................... 43
Figura 15 - Cronograma do projeto ....................................................................................................... 53
3
LISTA DE QUADROS
Quadro 1 - Código de cores dos materiais recicláveis .......................................................................... 12
Quadro 2- Exemplos de materiais recicláveis e não recicláveis............................................................ 14
Quadro 3- Quadro resumo do tipos de lixo com seus leds de sinalização ............................................ 34
Quadro 4 - Testes empíricos realizados para o sensor detector de metal .............................................. 34
Quadro 5 – Testes empíricos realizados para o sensor ótico ................................................................ 35
Quadro 6 - Testes realizados com diferentes tipos de materiais ........................................................... 51
4
SUMÁRIO
1 INTRODUÇÃO ................................................................................................................... 10
1.1 A RECICLAGEM ............................................................................................................................ 10
1.1.1 Plástico ..................................................................................................................................... 10
1.1.2 Papel ........................................................................................................................................ 10
1.1.3 Vidro......................................................................................................................................... 10
1.1.4 Alumínio................................................................................................................................... 11
1.2 SÍMBOLOS E CÓDIGOS DE CORES DA RECICLAGEM .................................................................... 11
1.3 PESQUISA DE LIXEIRAS SENSORIZADAS....................................................................................... 15
2. BASES TEÓRICAS............................................................................................................ 16
2.1 CAMPOS MAGNÉTICOS ............................................................................................................... 16
2.2 ESPECTRO DE FREQUÊNCIA DA LUZ INFRAVERMELHA ............................................................... 18
3 OBJETIVO .......................................................................................................................... 21
3.1 DETECÇÃO DE METAIS................................................................................................................. 21
3.2 DETECÇÃO DE VIDROS E PLÁSTICOS............................................................................................ 21
3.3 DETECÇÃO DE OUTROS TIPOS DE MATERIAIS ............................................................................. 22
4. METODOLOGIA............................................................................................................... 23
4.1 DESENVOLVIMENTO DOS SENSORES .......................................................................................... 23
4.1.1 Detector de metais .................................................................................................................. 23
4.1.1.1 Vantagens .............................................................................................................................. 25
4.1.1.2 Aplicações.............................................................................................................................. 25
4.1.1.3 Fabricantes ............................................................................................................................ 26
4.1.2 Sensor infravermelho .............................................................................................................. 26
4.1.2.1 Vantagens do sensor infravermelho ..................................................................................... 29
4.1.2.2 Aplicações.............................................................................................................................. 29
5
4.1.2.3 Fabricantes ............................................................................................................................ 29
4.2 FUNCIONAMENTO DOS SENSORES ............................................................................................. 30
4.2.1 Detector de metais .................................................................................................................. 30
4.2.2 Detector de vidros e plásticos ................................................................................................. 31
4.2.3 Detector de papel e outros tipos de lixo ................................................................................ 33
4.3 TESTES EMPÍRICOS REALIZADOS ................................................................................................. 34
4.4 DIAGRAMAS DE NÍVEIS DE TENSÃO ...................................................................... 35
5. CÁLCULOS REALIZADOS ............................................................................................ 37
5.1 DETECTOR DE METAIS ................................................................................................................. 37
5.2 SENSOR INFRAVERMELHO .......................................................................................................... 37
5.2.1 Emissor ..................................................................................................................................... 37
5.2.2 Receptor................................................................................................................................... 38
5.3 LEDS DE SINALIZAÇÃO ................................................................................................................. 39
5.3.1 Led amarelo ............................................................................................................................. 39
5.3.2 Led verde ................................................................................................................................. 40
5.3.3 Led azul .................................................................................................................................... 40
6 FLUXOGRAMA.................................................................................................................. 42
7 CIRCUITO COMPLETO .................................................................................................. 43
8 CÓDIGO DO FIRMWARE ............................................................................................... 44
9 CARACTERÍSTICAS E LIMITAÇÕES ......................................................................... 50
10 TESTES DE VALIDAÇÃO .............................................................................................. 51
10.1 MOTIVO DOS ERROS ................................................................................................................. 51
11 CRONOGRAMA ............................................................................................................... 53
12 RISCOS .............................................................................................................................. 54
13 CONCLUSÃO.................................................................................................................... 55
REFERÊNCIAS ..................................................................................................................... 56
ANEXO A – DATASHEET LD271HL ................................................................................. 58
6
ANEXO B – OPL 155 PTXCDATASHEET .......................... 6Erro! Indicador não definido.
ANEXO C – OPL 155XXXXC-15 .............................................. Erro! Indicador não definido.
10
1 INTRODUÇÃO
1.1 A RECICLAGEM
A reciclagem significa o reaproveitamento de materiais beneficiados como matéria
prima, para um novo produto, convertendo o lixo descartado em produto semelhante ao
original ou outro. Existem vários produtos que podem ser reciclados, mas os mais importantes
são o plástico, o papel, o vidro e o metal. A reciclagem traz inúmeros benefícios como a
limpeza da cidade, a diminuição da poluição e a preservação do meio ambiente, além de gerar
emprego e renda a pessoas de baixa renda.
O Brasil está aumentando a reciclagem de seus materiais a cada ano, porém tem muito
ainda a melhorar, com exceção do alumínio, onde a sua reciclagem é bastante elevada, sendo
por alguns anos o país onde o índice de reciclagem é o mais elevado do mundo.
Alguns dados referentes à reciclagem de diversos tipos de materiais podem ser vistos
nos subitens subsequentes.
1.1.1 Plástico
O plástico é um material de difícil degradação, por isso é enorme a necessidade de sua
reciclagem. Em 2008, mais de 2,5 milhões de toneladas de plástico foram produzidos no
mundo, sendo cerca de 21,2% reciclados no Brasil, representando aproximadamente 556 mil
toneladas, ficando acima da média reciclada na Europa que foi de 18,3%. (COMPROMISSO
EMPRESARIAL PARA RECICLAGEM, 2010)
1.1.2 Papel
No Brasil, em 2008, foram produzidos 9,85 milhões de toneladas de papel. 43,7% de
todo o papel utilizado voltou à produção de papel, representando 4,30 milhões de toneladas.
(ASSOCIAÇÃO BRASILEIRA DE CELULOSE E PAPEL, 2010)
1.1.3 Vidro
11
No Brasil, em 2008, cerca de 1 milhão toneladas de vidro foram produzidos e 47%
desse total reciclados, totalizando 470 mil toneladas. Desse total, 40% é oriundo da indústria
de envase, 40% do mercado difuso, 10% de bares, restaurantes, hotéis, etc e 10 % do refugo
da indústria. Nesse mesmo ano, o setor de reciclagem faturou cerca de 1,4 bilhão de reais.
(COMPROMISSO EMPRESARIAL PARA RECICLAGEM, 2010)
1.1.4 Alumínio
A lata de alumínio é o material reciclável mais rentável, sendo esse, possivelmente o
motivo de ser também o material mais reciclado no país. O Brasil durante vários anos
consecutivos vem sendo o país que mais recicla esse tipo de material, tendo, em 2008, cerca
de 91,5% das latas de alumínio reciclados, ficando a frente de países industrializados como
Japão e Estados Unidos, movimentando cerca de R$ 1,6 bilhão na economia nacional, isso
apenas na etapa de coleta. (COMPROMISSO EMPRESARIAL PARA RECICLAGEM,2010)
Infelizmente, o grande sucesso de o Brasil estar no topo dos países no índice de
reciclagem de alumínio, não se deve apenas à boa vontade do povo brasileiro, mas sim, do
fato de o alumínio ser o material reciclável mais rentável de todos, e assim o que mais vale a
pena reciclar do ponto de vista financeiro a fim de conseguir uma pequena renda.
1.2 SÍMBOLOS E CÓDIGOS DE CORES DA RECICLAGEM
O símbolo mundial da reciclagem é um triângulo, formado por três setas, no sentido
horário, conforme pode ser visto na Figura 1. Elas fazem alusão a um ciclo: a primeira seta
representa a indústria, que produz um determinado produto, a segunda seta refere-se ao
consumidor, que utiliza o produto, e a terceira seta representa a reciclagem, que permite a
reutilização da matéria-prima, retornando assim para o primeiro ciclo. (COMPANHIA DE
DESENVOLVIMENTO DE CAXIAS DO SUL, 2010)
12
Figura 1- Símbolo internacional da reciclagem
Fonte: http://www.sucatas.com/saibamais_reciclagem.html.
O símbolo foi criado como parte de um concurso que foi patrocinado pelo Container
Corporation of America, nos Estados Unidos. A empresa convidou estudantes de arte e design
de todo o país para projetar um símbolo que pudesse ser usado para ajudar a sensibilizar para
as questões ambientais. O concurso foi vencido por Gary Anderson, um estudante da
Universidade do Sul da Califórnia. O símbolo desde então tem sido adotado em todo o mundo
como o símbolo da reciclagem. (DYER, 2010)
Cada um dos materiais recicláveis como plástico, papel, vidro, alumínio, madeira,
orgânicos, entre outros, são representados por cores distintas, as quais são expostas nas suas
apropriadas lixeiras. Não apenas pelas cores, mas também por símbolos, a diferenciação dos
materiais é reconhecida, sendo o material reciclável ou não. No Quadro 1 as cores para cada
tipo de material são apresentadas.
COR
AZUL
VERMELHO
VERDE
AMARELO
PRETO
LARANJA
BRANCO
ROXO
MARROM
CINZA
TIPO DE MATERIAL
Papel / Papelão
Plástico
Vidro
Metal
Madeira
Resíduos Perigosos
Resíduos Perigosos e de Serviços de Saúde
Resíduos Radioativos
Resíduos Orgânicos
Resíduo geral não reciclável, contamidado ou misturado não passível de separação
Quadro 1 - Código de cores dos materiais recicláveis
Fonte: http://ambientes.ambientebrasil.com.br.
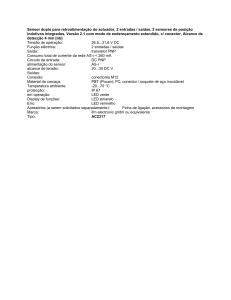
Os símbolos mais comuns com suas respectivas cores são mostrados na Figura 2.
13
Figura 2 – Símbolos dos materiais recicláveis, orgânicos e outros
Fonte: http://brincardereciclar.spaceblog.com.br.
A diferenciação dos materiais por cores e símbolos é um eficiente sistema para a
coleta seletiva voluntária em todo o mundo. Vários países já reconhecem esse padrão como
um parâmetro oficial a ser seguido por qualquer modelo de gestão de programas de coleta
seletiva.
São considerados recicláveis aqueles resíduos que constituem interesse de
transformação, que têm mercado ou operação que viabiliza sua transformação
industrial. Para citar um exemplo: fraldas descartáveis são recicláveis em alguns
países, mas no Brasil não há essa tecnologia (ainda). Portanto não há destino
alternativo aos lixões e aterros sanitários para fraldas descartáveis no Brasil. Logo,
fraldas descartáveis não se configuram como materiais recicláveis no nosso
contexto. Este exemplo também é bom para demonstrar como não há “receita de
bolo” e a importância de o programa de coleta seletiva ter coerência com a realidade
local, isto é, a realidade social, ambiental e econômica (INSTITUTO DO MANEJO
E BIODIVERSIDADE, 2010).
O Quadro 2 mostra uma lista de materiais recicláveis e os ditos não recicláveis, porém
em certas regiões tem compradores, podendo ser considerados, portanto, recicláveis.
Recicláveis
Não Recicláveis
PLÁSTICO
Copos
Embalagens Metalizadas (Salgadinhos)
Garrafas
Adesivos
Sacos/Sacolas
Espumas
14
Canos e tubos de PVC
Acrílicos
Potes
METAL
Latas
Esponja de Aço
Enlatados
Aerossóis
Cobre
Latas de Tinta, Verniz, Solventes Químicos
Ferragens
Latas de Inseticidas
Pregos
Grampos
Canos
PAPEL
Jornais e revistas
Etiquetas adesivas
Listas telefônicas
Papel carbono
Papel sulfite
Papel celofane
Papel de fax
Fita crepe
Folhas de caderno
Papéis sanitários
Formulários de computador
Papéis metalizados
Caixas em geral
Papéis parafinados
Aparas de papel
Papéis plastificados
Fotocópias
Guardanapos
Envelopes
Bitucas de cigarros
Rascunhos
Fotografias
Cartazes
VIDRO
Garrafas
Espelhos
Potes de conservas
Boxes temperados
Embalagens
Louças
Frascos de remédios
Cerâmicas
Copos
Tubos de TV
Cacos
Pirex
Pára-brisas
Porcelanas
Quadro 2- Exemplos de materiais recicláveis e não recicláveis
Fonte: http://www.naturallimp.com.br/newSite/home/index.php?area=a003.
15
1.3 PESQUISA DE LIXEIRAS SENSORIZADAS
Foi realizado inúmeras pesquisas em periódicos, literaturas, sites de pesquisa técnica
como a CAPES e a IEEE, além de outros e em sites abertos na internet, tanto no idioma
português quanto no inglês, durante meses e não foi encontrado nenhum tipo de lixeira que se
aproximasse da lixeira desenvolvida nesse projeto, que seja capaz de fazer a detecção e
identificação ou separação dos principais tipos de lixo descartáveis de forma automatizada,
mostrando ser um projeto original.
Uma interessante lixeira pesquisada e que possui algum tipo de sensoriamento foi a
lixeira falante, desenvolvida para deficientes visuais. As lixeiras são formadas por latões
individuais, um para cada tipo de lixo, onde em cada uma delas possui um sensor de
proximidade, e quando um deficiente visual se aproxima, a lixeira identifica a sua
proximidade e informa de forma sonora qual o tipo de lixo é destinado àquela lixeira. É uma
lixeira inteligente e higiênica, pois o deficiente visual não precisa entrar em contato por meio
de toques, além de servir também a pessoas sem deficiência, seguindo os padrões de cores de
cada material. Estas lixeiras foram desenvolvidas por alunos de Engenharia Ambiental da
universidade UNA, em Belo Horizonte, para o projeto ‘Coleta dos Sons – Coleta seletiva,
acessibilidade para toda à sociedade’. Algumas das lixeiras desenvolvidas podem ser vistas na
Figura 3 (UNA, 2010).
Figura 3 - Lixeiras falantes para deficientes visuais
Fonte: http://blogs.una.br.
16
2. BASES TEÓRICAS
Para o correto entendimento dos sensores que serão utilizados neste projeto, e que
serão mais adiante explicados, é importante entender basicamente como funcionam os campos
magnéticos e saber a respeito do espectro de frequência da luz infravermelha.
2.1 CAMPOS MAGNÉTICOS
“O magnetismo está presente no mundo atual em diversos equipamentos como os imãs
de geladeira, tubos de televisão, discos rígidos de computadores, equipamentos de ressonância
nuclear magnética, alto-falantes e muitos outros” (MACEDO, at al. p. 149).
Campo magnético, representado por B, é a região de espaço onde atuam forças
magnéticas. O campo magnético é uma grandeza vetorial que se manifesta através de uma
força magnética. A unidade de intensidade do campo magnético no Sistema Internacional é o
Tesla (T) (TIPLER, 1984).
As chamadas linhas de campo magnético são linhas imaginárias que representam o
vetor campo magnético. As zonas mais próximas da fonte da força magnética, são zonas onde
o campo magnético é mais intenso. Os campos magnéticos podem ser produzidos de dois
modos: com ímã ou com correntes elétricas. Um jeito de visualizar um campo magnético é
colocar uma folha de papel sobre um imã, e depositar lentamente limalha de ferro sobre o
papel. A limalha vai formar o desenho do campo magnético, conforme mostra a Figura 4. O
espectro magnético mostra as linhas de campo magnético.
Figura 4 - Espectro magnético
Fonte: http://portaldoprofessor.mec.gov.br
17
Quando é espalhado limalha de ferro em torno de um fio onde circula corrente
elétrica, os pequenos pedaços de ferro da limalha alinham-se segundo a direção do campo
magnético como se fossem agulhas magnéticas, conforme mostrado na Figura 5.
Figura 5 - Limalhas mostrando as linhas de campo de uma bobina energizada.
Fonte: http://portaldoprofessor.mec.gov.br
Neste projeto os campos magnéticos produzidos serão através de correntes elétricas
que fluem através da bobina do detector de metais. O campo magnético produzido na bobina
está representado na Figura 6. Ao contrário dos campos elétricos, os campos magnéticos são
criados apenas quando a corrente flui. Neste caso, os campos elétrico e magnético co-existem.
Quanto mais elevada a intensidade da corrente mais elevado é o campo magnético, e o
interessante é que não são atenuados por materiais como paredes e pisos comuns (MARTINS,
1975).
Figura 6 - Linhas de campo de um solenóide
Fonte: http://projectomedeaesa.110mb.com.
18
As substâncias metálicas podem ser classificadas, segundo seu magnetismo, como:
a) metais paramagnéticos: Os metais paramagnéticos têm como característica, seus
átomos com momento magnético permanente. Os movimentos orbitais dos elétrons e os spins
produzem correntes circulares que são diferentes de zero. Os materiais ferromagnéticos
também podem ser considerados paramagnéticos quando a agitação térmica atinge
temperaturas suficientemente elevadas. Os ferromagnéticos se distinguem dos paramagnéticos
pelo fato de a imantação adquirida pelo material não ser proporcional ao campo magnético e
pelo fato de ter os momentos magnéticos sempre alinhados, mesmo na ausência de um campo
externo. Os objetos paramagnéticos, incluindo os ferromagnéticos, concentram as suas linhas
de força, aumentando assim a indutância da bobina. Como exemplo de metais
paramagnéticos, podem ser citados o ferro, o latão e o níquel (MARTINS, 1975).
b) metais diamagnéticos: os metais diamagnéticos são caracterizados pelo fato de
seus átomos não produzirem um momento magnético permanente, como no caso dos
paramagnéticos. Os momentos magnéticos induzidos nos átomos serão na direção oposta ao
campo magnético aplicado, sendo então induzidos na direção oposta ao campo externo. Em
outras palavras, os metais diamagnéticos dispersão as linhas de força, diminuindo assim a
indutância da bobina. Como exemplo deste tipo de metal pode ser citado o alumínio e o
bismuto (MARTINS, 1975)
2.2 ESPECTRO DE FREQUÊNCIA DA LUZ INFRAVERMELHA
Espectro visível é a faixa do espectro eletromagnético com comprimentos de onda na
faixa de 400 a 700 nm, aproximadamente. Identifica-se esta radiação como sendo a luz
visível, ou simplesmente luz. O menor comprimento de onda do espectro visível corresponde
à cor violeta e o maior à cor vermelha, ficando a luz visível do espectro entre a radiação
infravermelha e a ultravioleta, conforme pode ser visto na Figura 7. As cores que percebemos
são o resultado da resposta fisiológica e psicológica do sistema olho-cérebro aos diferentes
comprimentos de onda da luz. Para cada frequência da luz visível é associada uma cor
(TIPLER, 1984).
19
Figura 7 - Espectro eletromagnético
Fonte: eletronicos.hsw.uol.com.br
A luz infravermelha (IR) é a radiação eletromagnética com comprimento de onda entre
0,7 e 300 micrômetros, é a parte da radiação eletromagnética cujo comprimento de onda é
maior que o da luz visível ao olho humano. Os comprimentos de onda infravermelhos são
mais longos do que a luz visível, mas menor do que o das microondas, assim como mostrado
na Figura 8.
Figura 8 - Comprimentos de onda
Fonte: curiofisica.com.br.
A Comissão Internacional de Iluminação (CIE), recomenda a divisão da radiação
infravermelha em três faixas, que podem ser estabelecidas como o infravermelho próximo,
que vai de 0,7 a 1,5 µm, o infravermelho médio, de 1,5 a 10 µm, e o infravermelho distante,
de 10 a 1000 micrômetros. O infravermelho próximo possui as mesmas propriedades da luz
visível, com a diferença de que não é percebido pela vista e pode ser produzido por qualquer
fonte luminosa. Já o infravermelho intermediário requer técnicas mais refinadas para ser
produzido. Estas divisões não são precisas e podem variar dependendo da publicação
(STUART, 2004)
Embora invisível, a radiação infravermelha pode ser percebida por suas propriedades
de aquecimento. Quando um aquecedor elétrico é ligado, sente-se seu calor irradiado antes
mesmo que a resistência comece a avermelhar-se.
20
Se a visão fosse capaz de captar a radiação de 10 µm (comprimento de onda mais
comum emitido por de corpos de seres vivos à temperatura ambiente), não precisaríamos de
iluminação artificial, pois tudo seria brilhante, independente se fosse dia ou noite. Os seres
vivos se destacariam com nitidez por serem mais quentes e, portanto, mais brilhante que o
ambiente. Apenas os objetos frios ficariam negros. Assim, sem o emprego de luz artificial,
seria difícil descobrir qualquer coisa que estivesse no interior dos refrigeradores (STUART,
2004). Alguns animais tem a visão capaz de perceber radiação de 10 µm que lhes permitem
caçar durante a noite. Esta habilidade de perceber objetos quentes no escuro tem
impulsionado muitas pesquisas sobre sistemas de detecção.
21
3 OBJETIVO
O objetivo deste projeto é de desenvolver sensores que sejam capazes de fazer a
detecção e identificação de materiais feitos de metal, plástico e vidro e distingui-los de
diferentes outros tipos de materiais como o papel e seus derivados. As identificações são
feitas através do acendimento de leds coloridos, para um futuro uso na separação e reciclagem
de lixo.
Este projeto tem como foco para sua utilização, ambientes públicos fechados como
shoppings centers, centros de convenções, teatros e universidades, onde na maior parte os
lixos descartados são recicláveis, não tão complexos e muitas vezes puros.
3.1 DETECÇÃO DE METAIS
Este detector tem como finalidade identificar e indicar através do acendimento de um
led de cor amarela a presença de variados tipos de metais como ferro, aço, alumínio, etc. Ele é
capaz de identificar materiais que tenham uma quantidade mínima de metal, capaz de alterar
consideravelmente as linhas do campo magnético produzido por sua bobina, alterando assim,
de maneira relevante, a frequência de oscilação do circuito, que então será tratado por um
microcontrolador, acionando o led.
Este detector deve ser capaz de identificar diferentes tipos de materiais metálicos, seja
ele um metal diamagnético, paramagnético ou ferromagnético.
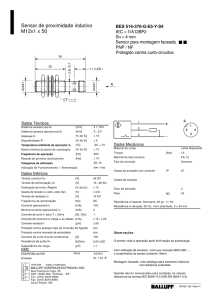
Para a detecção de ambos os tipos de metais, será utilizado um sensor do tipo indutivo
pelo fato desse tipo de sensor ser muito eficiente para esse fim e de não sofrer interferência
relevante de outros tipos de materiais que não sejam metálicos.
3.2 DETECÇÃO DE VIDROS E PLÁSTICOS
O detector de vidros e plásticos tem como objetivo fazer a detecção de objetos
translúcidos, onde em sua grande maioria são vidros e plásticos, e identificá-los através do
acionamento de um led de cor verde. Os vidros e os plásticos serão detectados em conjunto,
apresentando uma indicação única. Estes dois tipos de materiais possuem uma característica
semelhante, onde em sua grande maioria, a luz, ou parte dela, consegue atravessar o material,
podendo ser percebida do outro lado. Por esse motivo, serão utilizados sensores ópticos de luz
22
infravermelha para a detecção de ambos os tipos. O seu funcionamento será explicado mais
adiante.
3.3 DETECÇÃO DE OUTROS TIPOS DE MATERIAIS
Outros tipos de materiais que não sejam nem metal, nem vidro ou plástico, onde em
sua grande maioria será o papel ou derivados dele como caixas, envelopes, papéis de presente
e embalagens diversas, também serão detectados e identificados. A intenção é que estes tipos
de materiais sejam identificados para que futuramente possam ser separados dos metais,
vidros e plásticos, auxiliando na separação do lixo e buscando uma melhor conservação da
natureza e do meio ambiente.
23
4. METODOLOGIA
4.1 DESENVOLVIMENTO DOS SENSORES
Dois tipos de sensores são utilizados neste projeto, um sensor de barreiras de luz
infravermelha e um sensor detector de metais. Também é utilizada uma lixeira para que
dentro dela os lixos sejam descartados. Esta lixeira possui um tamanho de 20 cm x 13 cm e os
sensores são dispostos ao seu redor de maneira estratégica. Para que seja possível ser feita a
identificação dos materiais, a altura máxima do lixo não é o mais relevante, embora seja
recomendado que não ultrapasse os 25 cm e a altura mínina deve ser de 1,5 cm.
4.1.1 Detector de metais
O detector de metais foi construído através de um circuito oscilador do tipo LC. O
circuito possui uma bobina em paralelo com dois capacitores em série, onde entre estes
capacitores é ligado ao ground.
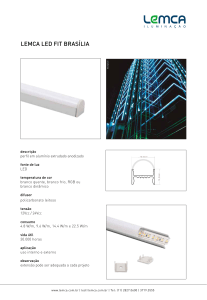
O circuito básico do oscilador LC, responsável por perceber a aproximação de metais,
pode ser visto na Figura 9 e o seu funcionamento é explicado em seguida.
24
Figura 9 – Esquemático do circuito detector de metais
Fonte: Fonte própria.
Este circuito utiliza uma porta lógica inversora, U1:A, e um resistor, R, em paralelo
com o oscilador LC. Este resistor tem a função de aumentar o ganho da porta lógica,
auxiliando na inversão do sinal e a porta inversora tem a função de gerar a energia necessária
para que o oscilador não atenue, provendo uma diferença de fase de 180° entre a entrada e a
saída do oscilador, fazendo com que o circuito oscile numa determinada frequência. A
frequência do oscilador é calculada através da equação (1) (ELECTRONICS DESIGN,
STRATEGY, NEWS, 2010).
(1)
onde,
(2)
25
Fixando os valores dos capacitores e determinando a frequência desejada para que o
circuito oscile, é possível isolar a variável L da equação (1) para saber a indutância que a
bobina a ser construída deve ter. Esta frequência é determinada levando em consideração a
frequência de funcionamento do microcontrolador a ser utilizado. Isolando a variável L, seu
valor pode ser calculado conforme a equação (3).
(3)
Tendo calculado o valor da indutância da bobina, foi possível fazer o seu enrolamento
até atingir o valor desejado. A bobina foi construída da seguinte forma: foi feito um
enrolamento com um fio de cobre esmaltado AWG 28 em volta da lixeira com um número de
100 voltas. Foram então retiradas algumas voltas e testando até que foi atingido o valor de
indutância desejado.
Para a construção deste circuito foi utilizado portas lógicas inversoras com Schmitt
Trigger com a intenção de se obter uma maior estabilidade em sua saída, onde é ligado a um
pino do microcontrolador. Conforme pode ser visto na Figura 9, uma segunda porta lógica
inversora, U1:B, foi utilizada para converter a onda senoidal gerada pelo oscilador LC em
uma onda quadrada. Esta onda senoidal na saída de U1:A é devido ao carregamento e
descarregamento dos capacitores C1 e C2.
4.1.1.1 Vantagens
Algumas vantagens que o sensor indutivo proporciona são:
a) não é preciso haver contato físico com o metal a ser identificado;
b) é capaz de perceber aproximação de qualquer tipo de metal;
c) não sofre interferência considerável de outros tipos de materiais.
4.1.1.2 Aplicações
Algumas aplicações podem ser citadas:
a) sensores em lombadas eletrônicas;
b) detectores de metais subterrâneos;
26
c) detectores de arma;
d) portas de segurança.
4.1.1.3 Fabricantes
Algumas das empresas que fabricam detectores de metal para determinados fins são:
Portas de segurança: porta de passagem, capaz de perceber a presença de objetos
metálicos, a fim de evitar a passagem de armas de fogo ou armas brancas em locais proibidos.
a) Mineoro (www.mineoro.com.br)
b) Detronix (www.detronix.com.br)
c) Magnetec (www.magnetec.com.br)
Detector de metais subterrâneos: equipamento manual utilizado para perceber a
aproximação de objetos metálicos abaixo da superfície do solo.
a) Ceia (www.ceia.net)
Detector de metais manual: equipamento de mão utilizado para fiscalizar a presença de
metais próximo ao corpo.
a) Priel (www.priel.com.br)
Detector de metais industriais: equipamentos para prevenir a presença de objetos
contaminados de metais.
a) Ieco (www.ieco.com.br)
4.1.2 Sensor infravermelho
O sensor infravermelho foi feito através da construção de sensores de barreiras
infravermelhas, e para isso foi utilizado dois tipos de transdutores. Um deles é o led emissor
de luz infravermelha, capaz de converter corrente elétrica em luz, e o outro é o fototransístor,
capaz de fazer o inverso, captar a luz infravermelha recebida e converter em corrente elétrica
(FRADEN, 2004).
27
O transdutor utilizado na transmissão é o led emissor LD271H do fabricante Siemens,
onde este tem a simples função de emitir luz infravermelha direcionada e apontada para o
receptor.
Seu
datasheet
(ANEXO
A)
pode
ser
encontrado
no
endereço
<http://www.datasheetcatalog.org/datasheet/siemens/LD271HL.pdf>. A construção de seu
circuito é a mesma de um led comum e seu esquemático pode ser visto na Figura 10.
Figura 10 – Esquemático do sensor transmissor infravermelho
Fonte: Fonte própria.
O valor do resistor, Rtx, depende da corrente e da tensão de funcionamento do led
LD271H, e da tensão de alimentação do circuito, +V. O cálculo de Rtx, é mostrado na
equação (4).
(4)
onde:
Vcc = tensão de alimentação (+V);
Vf = led forward voltage (fornecido pelo datasheet);
If = led forward current (fornecido pelo datasheet).
É preciso também calcular a potência mínima que o resistor Rtx deve suportar. Essa
potência é calculada através da equação (5):
28
(5)
onde:
(6)
Na recepção, o transdutor utilizado é o fototransístor OPL 155 PTXC, de junção NPN,
fabricado pela Optech. Seu datasheet (ANEXO B) pode ser encontrado no endereço
<http://www.optech.ind.br/produtos/pdf/cpg092.pdf>. A sua função é de captar o quanto de
luz infravermelha, emitida pelo emissor, está chegando à sua base, e de acordo com a
intensidade de luz recebida, permite a passagem de corrente do seu coletor para o emissor
gerando uma tensão de saída que é limitada pela tensão de alimentação do coletor
(MARQUES, 1996). O circuito esquemático do receptor pode ser visto na Figura 11.
Figura 11 - Esquemático de ligação do fototransístor
Fonte: Fonte própria.
A tensão de saída, Vout, pode ser calculada através da equação (7).
(7)
onde, Ice é a corrente coletor-emissor, fornecida pelo fabricante. Para o cálculo do resistor
Rrx a ser utilizado no emissor do fototransístor, é utilizado a equação (8), mostrada abaixo.
29
(8)
onde, Vcc é a tensão de alimentação do circuito, +V.
Para o cálculo da potência mínima que os resistores devem suportar em cada barreira
do receptor é utilizado a equação (9) (MARQUES, 1996).
(9)
4.1.2.1 Vantagens do sensor infravermelho
Algumas de suas vantagens são:
a) não é preciso haver contato físico com o material a ser identificado;
b) não sofre interferência de campos magnéticos;
c) baixo custo.
4.1.2.2 Aplicações
Algumas das aplicações são:
a) detector de proximidade;
b) detector de presença;
c) detector de calor;
d) acionamento de equipamentos eletrônicos por controle remoto;
e) sensor de barreira.
4.1.2.3 Fabricantes
Algumas das empresas que fabricam sensores infravermelhos para determinados fins
são:
Sensores de barreiras: formado por um emissor de luz infravermelha apontado à um
captador de luz infravermelha. Caso a barreira de luz infravermelha seja bloqueada, o receptor
percebe a omissão da luz e toma uma decisão.
30
a) JFL (www.jfl.com.br)
b) Ipec (www.ipec.ind.br)
c) Samtek (www.samtek.com.br)
Sensores de presença: consegue perceber a presença de um objeto ou corpo pela
reflexão da luz infravermelha emitida ou pela radiação de luz infravermelha que atravessa sua
frontal.
a) JFL (www.jfl.com.br)
b) Samtek (www.samtek.com.br)
Sensores de câmeras noturnas: capaz de visualizar corpos que emitem calor, caso dos
seres vivos, mesmo sem nenhuma luz no espectro de frequência visível.
a) Atronix (www.atronix.com.br)
Sensores de detecção de temperatura: identifica a quantidade de radiação
infravermelha (calor) é emitida pelo objeto a ser analisado.
a) ifm eletronic (www.ifm-electronic.com)
4.2 FUNCIONAMENTO DOS SENSORES
Nessa parte será explicado a maneira como os sensores foram dispostos, como
funcionam e como é feito a detecção e a indicação de cada tipo de material.
Os materiais são detectados e identificados da seguinte forma: materiais metálicos
serão identificados através de um sensor indutivo e representados por um led de cor amarela.
O plástico e o vidro serão detectados através de um sensor do tipo infravermelho e serão
indicados por um único led, ou seja, detectados em conjunto através de um mesmo tipo de
sensor, não havendo distinção entre o plástico e o vidro. Estes dois materiais serão indicados
pelo acendimento de um led de cor verde. Um terceiro led, de cor azul, também será ativado
quando o objeto descartado no identificador de materiais não for nem um metal, nem um
vidro e nem um plástico, sendo assim, qualquer tipo de material descartado que não seja
nenhum destes três tipos de material, e será identificado como outros, utilizando também o
sensor do tipo infravermelho.
4.2.1 Detector de metais
31
A porta lógica U1:A, representado na Figura 9 é a responsável por gerar energia para
que o circuito oscile, gerando uma corrente alternada que passa através da bobina, e
consequentemente, gerando um campo magnético ao redor dela. Este circuito oscila em uma
frequência fixa, até que um metal se aproxime das linhas de força do campo magnético,
alterando assim, a indutância da bobina, e por virtude disso, sua frequência de oscilação. A
frequência tende a variar de acordo com a quantidade, o tipo, a localização e o tamanho do
metal aproximado das linhas de força do campo magnético.
Dependendo do tipo do metal, a indutância do campo magnético da bobina tende a
aumentar ou diminuir, alterando assim a sua frequência de oscilação. À saída do circuito
detector de metal, como foi visto na Figura 9, é ligado um pino do microcontrolador,
responsável por ficar monitorando esta variação de frequência, e caso perceba uma variação
relevante por um tempo que fica em torno de 2 segundos, um pino de saída do
microcontrolador tem seu nível lógico alterado, acendendo assim, um led de cor amarela,
sinalizando a presença de metal.
A forma como o microcontrolador faz o controle da frequência do circuito LC é
através da contagem de pulsos em um pino de entrada ligado ao circuito. Essa contagem é
feita por um tempo de 150 ms que fica em um loop infinito no firmware. A calibração é feita
quando o sensor é ligado, guardando esse valor em uma variável, e a partir deste momento
começa a monitorar a quantidade de pulsos que está recebendo e comparar com a quantidade
de pulsos armazenada na variável.
4.2.2 Detector de vidros e plásticos
Com a junção dos transdutores infravermelhos, led transmissor e fototransístor
receptor, são formadas barreiras de luz infravermelha. Este sensor é formado por quatro
barreiras de luz infravermelha conforme mostrado na Figura 12.
32
Figura 12 - Vista superior da lixeira com visão dos sensores infravermelhos
Fonte: Fonte própria.
Neste projeto, o sensor infravermelho funciona e foi construído da seguinte forma: foi
colocado no transmissor uma fileira com 4 leds infravermelhos horizontalmente de um lado
da lixeira, e do outro lado uma segunda fileira, porém de fototransístores utilizados para
recepção. Os transdutores encontram-se a 1 cm de altura do fundo da lixeira com um
afastamento horizontal de 4 cm entre eles, de cada lado da lixeira, ficando assim, separados
proporcionalmente ao tamanho lateral da lixeira que é de 20 cm.
Cada led transmissor está constantemente aceso e apontado para apenas um
fototransístor. O sinal de saída de cada receptor é enviado a um microcontrolador de forma
analógica. Enquanto nenhum objeto for colocado entre as barreiras de luz, as tensões de saída,
localizadas no emissor de cada fototransístor, ficam próximas de 5 volts. Esta tensão pode cair
próximo à 0V quando há um bloqueio total da barreira ou cair proporcionalmente de acordo
com a quantidade de luz bloqueada. Como a maior parte dos plásticos e vidros jogados em
lugares públicos são translúcidos, quando estes são jogados na lixeira, apenas parte da luz é
bloqueada, sendo assim, parte da luz atravessa o objeto, chegando ao receptor, e dessa forma é
feito a identificação de que um plástico ou um vidro está em seu interior.
O sinal de saída de cada fototransístor é enviado a um pino do microcontrolador
independentes entre eles, responsável por fazer um constante monitoramento desta tensão. Se
33
um lixo depositado, translúcido, bloquear ao menos uma das barreiras, o microcontrolador
identifica a queda de tensão parcial e um pino de saída é acionado em nível lógico baixo,
acendendo um led de cor verde.
Caso o objeto obstrua mais de duas barreiras de luz infravermelha, para que o objeto
seja identificado como plástico ou vidro, terá que ser identificado como objeto translúcido por
pelo menos duas barreiras de luz. Isso pelo fato de alguns materiais descartados em lixeiras
possuírem rótulos de papel, por exemplo, onde a barreira onde o rótulo ou algo não
translúcido, estiver obstruindo não seja problema para a identificação. Ou seja, se o objeto
tiver duas ou mais barreiras obstruídas parcialmente, será identificado como plástico ou vidro.
É importante lembrar que a luz infravermelha está num comprimento de onda invisível
ao olho humano, mas que pode ser captado pelo sensor e também por alguns outros
dispositivos como câmeras fotográficas e filmadoras, sofrendo pouca interferência da luz que
precisamos para enxergar.
4.2.3 Detector de papel e outros tipos de lixo
O funcionamento deste detector é exatamente igual ao do detector de plásticos e
vidros, sendo utilizadas as mesmas barreiras de luz infravermelhas descritas no item 3.2.2. A
diferença no comportamento desses dois tipos de detectores é no fato de que, para a
identificação de vidros e plásticos, as quedas de tensão que chegam aos pinos do
microcontrolador são parciais, e no caso da identificação de outros tipos de materiais, como
em sua grande maioria são objetos não translúcidos, como o papelão ou um copo de isopor
por exemplo, a luz não é capaz de atravessar o objeto, havendo um bloqueio total entre as
barreiras em que o objeto se encontra, chegando assim a uma queda de tensão total, ou seja, a
uma tensão bastante próxima de zero volt. Quando a lixeira identificadora de materiais
identifica a presença de um lixo descartado em seu interior e este lixo não é um metal nem um
objeto translúcido, o microcontrolador encarrega-se de classificar este lixo como ‘outros’,
acionando um pino de saída do microcontrolador em nível lógico baixo, acendendo assim, um
led de cor azul.
De modo geral, quando um lixo é depositado no interior da lixeira, um led é aceso
dependendo do tipo de lixo depositado. Este led ficará aceso até que o material seja retirado
do interior da lixeira, voltando assim ao seu estado de apagado. Como lembrete, o Quadro 3
34
foi criado com o objetivo de melhor visualizar como é interligado cada tipo de lixo com suas
respectivas cores de led de sinalização.
COR DO LED
TIPO DE LIXO
Metal
Amarelo
Plástico/Vidro
Verde
Papel/Outros
Azul
Quadro 3- Quadro resumo do tipos de lixo com seus leds de sinalização
Fonte: Fonte própria.
4.3 TESTES EMPÍRICOS REALIZADOS
Testes empíricos foram realizados para verificar como cada tipo de material se
comporta perante os sensores, podendo ser verificado a variação dos níveis de tensão para o
sensor ótico, quando um material é colocado entre as barreiras e a variação de frequência
quando um metal invade o campo magnético da bobina no detector de metais. Ambos os
testes podem ser vistos no Quadro 4 e Quadro 5 para o sensor detector de metais e para o
sensor ótico, respectivamente.
Quadro 4 - Testes empíricos realizados para o sensor detector de metal
Fonte: Fonte própria
35
Quadro 5 – Testes empíricos realizados para o sensor ótico
Fonte: Fonte própria.
Estes testes foram fundamentais para que fosse possível desenvolver um firmware que
funcionasse de maneira satisfatória, apresentando o mínimo de erro.
4.4 DIAGRAMAS DE NÍVEIS DE TENSÃO
A partir dos testes empíricos apresentados no item anterior, diagramas de nível de
frequência e tensão foram construídos, podendo ser melhor visualizado como ficaram as
tomadas de decisões de cada sensor.
Ficou assim decidido: para o sensor detector de metais, caso haja uma variação
mínima de 3kHz, para mais ou para menos, o que equivale a 0,6% da frequência inicial, que é
de 473kHz, um led de cor amarela será acionado, indicando a presença de um metal. Esses
níveis de variação de frequência são demonstrados no
36
Diagrama 1. Para o sensor ótico, caso a tensão no receptor baixe em pelo menos 4% da
tensão inicial, que fica na faixa de 4,90 volts, algum material será identificado. Caso a queda
de tensão fique entre os 16% e 96% da tensão inicial, o que correspondem a 0,80V e 4,79V,
será acusado a presença de um vidro ou plástico, acionando o led de cor verde. Caso a tensão
caia abaixo dos 16%, o led de cor azul será acionado, indicando a presença de papel ou
‘outros’, confirme demonstrado no diagrama 2.
Diagrama 1 - Diagrama de nível do detector de metais
Fonte: Fonte própria.
Diagrama 2 - Digrama de nível para o sensor infravermelho
Fonte: Fonte própria.
37
5. CÁLCULOS REALIZADOS
5.1 DETECTOR DE METAIS
Para calcular o valor da indutância da bobina, é necessário antes calcular Cx através da
equação (2), tendo estabelecido os valores de C1 e C2 de 180pF.
Agora, utilizando a equação (1), é possível calcular a indutância que a bobina deve ter.
5.2 SENSOR INFRAVERMELHO
5.2.1 Emissor
O cálculo dos resistores em série com os leds infravermelho é feito através da equação
(4):
38
escolhido então, o valor comercial de 33R. Para realizar o cálculo da potência mínima que
estes resistores devem suportar, é utilizado a equação (5) em conjunto com a equação (6),
ficando:
Para garantir com uma certa folga, é utilizado um resistor de 1 watt.
5.2.2 Receptor
Para o cálculo dos resistores Rrx dos receptores, a equação (8) é utilizada, conforme
visto abaixo.
39
O valor do Ice fornecido no datasheet foi o da corrente máxima, então esse valor de
resistor seria o máximo valor necessário, podendo, portanto, ser utilizado valores bastante
menores do que esse.
Como a corrente é muito baixa, pode ser utilizado um resistor com potência comum de
ser encontrado de 1/8W.
5.3 LEDS DE SINALIZAÇÃO
Para sinalização de qual tipo de lixo está dentro da lixeira, leds de alto brilho das cores
amarelo, verde e azul serão utilizados, e para calcular os resistores a serem utilizados em série
com cada led e a potência mínima que cada resistor deve ter, são utilizadas as mesmas
equações (4) e (5), utilizadas para o cálculo dos leds infravermelho, sendo alterado apenas os
valores, conforme descrito nos cálculos abaixo. O datasheet dos leds (ANEXO C) podem ser
encontrados em <http://www.optech.ind.br/produtos/pdf/cpg041a.pdf>.
5.3.1 Led amarelo
Resistência:
40
Potência:
5.3.2 Led verde
Resistência:
Potência:
5.3.3 Led azul
Resistência:
41
Potência:
Para os três leds de sinalização, foram escolhidos resistores de 180R de 1/8W.
42
6 FLUXOGRAMA
Na Figura 13, é mostrado o fluxograma de como o firmware foi desenvolvido e como
os sensores funcionam.
Figura 13 - Fluxograma de funcionamento do projeto
Fonte: Fonte própria.
43
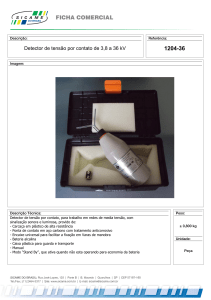
7 CIRCUITO COMPLETO
A Figura 14 ilustra o esquemático completo da placa de hardware, já contemplando todos os componentes com seus respectivos valores.
+5,0V
BARREIRA DE LUZ INFRAVERMELHA 1 BARREIRA DE LUZ INFRAVERMELHA 2
BARREIRA DE LUZ INFRAVERMELHA 3 BARREIRA DE LUZ INFRAVERMELHA 4
FONTE DE 5V
+7,5V
1
220uF
7805
OUT
GND
2
C1
100nF
U1
IN
C2
3
+5,0V
C3
Cap Pol1
470uF
Rtx1
33R
C4
100nF
PT1
OPL 155 PTXC
Rtx2
33R
L_IR1
LD271H
PT2
OPL 155 PTXC
Rrx1
56K
GND
Rtx3
33R
PT3
OPL 155 PTXC
L_IR2
LD271H
Rrx2
56K
P1
500K
Rrx3
56K
P2
500K
GND
GND
GND
4,7K
U2
MCLR 1
MCLR/VPP
1
XT
20MHz
+5,0V
13
14
2
11
32
C6
22pF
12
31
GND
GND
19
20
21
22
27
28
29
30
8
9
10
+5,0V
J1
OSC1/CLKI
OSC2/CLKO
VDD
VDD
VSS
VSS
RD0/PSP0
RD1/PSP1
RD2/PSP2
RD3/PSP3
RD4/PSP4
RD5/PSP5
RD6/PSP6
RD7/PSP7
RE0/RD/AN5
RE1/WR/AN6
RE2/CS/AN7
+5,0V
RA0/AN0
RA1/AN1
RA2/AN2/VREF-/CVREF
RA3/AN3/VREF+
RA4/T0CKI/C1OUT
RA5/AN4/SS/C2OUT
RB0/INT
RB1
RB2
RB3/PGM
RB4
RB5
RB6/PGC
RB7/PGD
RC0/T1OSO/T1CKI
RC1/T1OSI/CCP2
RC2/CCP1
RC3/SCK/SCL
RC4/SDI/SDA
RC5/SDO
RC6/TX/CK
RC7/RX/DT
2
3
4
5
6
7
33
34
35
36
37
38
39
40
15
16
17
18
23
24
25
26
R6
4,7K
DETECTOR DE METAIS
R1
180R
R2
LD1
R5
U1:B
LD2
4
U1:A
3
2
R3
1
LD3
180R
L1
Bobina
C7
C8
180pF
180pF
GND
PIC16F877A
MCLR
1
2
3
4
5
1M
+5,0V
180R
PGC
PGD
PGD
PGC
In-Circuit
GND
Figura 14 - Esquemático completo do hardware
Fonte: Fonte própria.
P4
500K
GND
GND
R4
L_IR4
LD271H
Rrx4
56K
GND
+5,0V
C5
22pF
PT4
OPL 155 PTXC
P3
500K
GND
GND
L_IR3
LD271H
Rtx4
33R
44
8 CÓDIGO DO FIRMWARE
O microcontrolador utilizado para gravação do firmware foi o PIC16F877A da
Microchip e o compilador utilizado para o desenvolvimento de seu firmware foi o MikroC da
MikroElektronika. O firmware completo pode ser visto abaixo:
#define entrada PORTB.F0
/* variáveis de 32 bits*/
unsigned long int i;
unsigned long int x;
unsigned long int guarda_entrada;
unsigned long int guarda_freq;
unsigned long int conta_freq;
/* variáveis de 16 bits*/
unsigned int primeiravez;
unsigned int temp1;
unsigned int temp2;
unsigned int temp3;
unsigned int temp4;
unsigned int var;
/* variáveis de 8 bits*/
unsigned int disparo_on;
unsigned int disparo_off;
unsigned int disparo_onn;
unsigned int contador;
unsigned int trava;
unsigned char metal;
////////////////////////////////////////////////////////////////
///////// FUNÇÃO QUE CONFIGURA OS REGISTRADORES ////////
/////////////// E DA UM VALOR ÀS VARIÁVEIS //////////////////
////////////////////////////////////////////////////////////////
void configuracao()
{
/*configura registradores*/
INTCON=0x00;
//desabilita as interrupções
OPTION_REG=8;
//configure prescaler para watchdog
ADCON1=0x09;
//seta as entradas AN0 até AN5 como analógicas e AN6 e AN7 digital
TRISA=0xFF;
//PORTA configurado como input o sensor IR
PORTB=28;
//os pinos 2, 3 e 4 do PORTB recebem nível lógico 1 e 0 para o restante
TRISB=1;
//configura PORTB como entrada
/*da valor às variáveis*/
var=10;
temp1=var;
temp2=var;
45
temp3=var;
temp4=var;
primeiravez=1;
conta_freq = 0;
disparo_on = 0;
disparo_off = 0;
disparo_onn = 0;
trava=0;
contador = 0;
metal = 0;
}
////////////////////// FIM DA FUNÇÃO /////////////////////////
////////////////////////////////////////////////////////////////
//////////////// INÍCIO DA FUNÇÃO PRINCIPAL //////////////////
////////////////////////////////////////////////////////////////
void main()
{
configuracao();
//chama a função configuração;
/*teste dos leds*/
PORTB.F2 = 0;
Delay_ms(400);
PORTB.F3 = 0;
Delay_ms(400);
PORTB.F4 = 0;
Delay_ms(400);
PORTB.F2 = 1;
Delay_ms(400);
PORTB.F3 = 1;
Delay_ms(400);
PORTB.F4 = 1;
//acende led azul
//aguarda 400ms
//acende led verde
//aguarda 400ms
//acende led amarelo
//aguarda 400ms
//apaga led azul
//aguarda 400ms
//apaga led verde
//aguarda 400ms
//apaga led amarelo
////////////////////////////////////////////////////////////////
////// ROTINA DE CALIBRAÇÃO DO DETECTOR DE METAL ////////
/////// CONTA A QUANTIDADE DE PULSOS DETECTADAS//////////
////////////////////////////////////////////////////////////////
for (i=0;i<20;i++)
//tempo de 3 segundos
{
x = 0;
while (x < 15000)
// tempo 150 ms
{
if (entrada == 1)
//verifica se pino de entrada está em nível lógico 1
{
if (trava == 0)
//trava para não contar várias vezes o nível lógico 1
{
trava = 1;
conta_freq = conta_freq + 1;
//conta quantidade de pulsos
}
}
else
46
if (entrada == 0)
trava = 0;
x++;
//verifica se pino de entrada está em nível lógico 0
}
if (primeiravez == 1)
{
primeiravez = 0;
guarda_freq = conta_freq;
}
guarda_freq = ((guarda_freq + conta_freq) / 2);
conta_freq = 0;
//faz a média da contagem dos pulsos
}
///////////// FIM DA ROTINA DE CALIBRAÇÃO ///////////////////
/* leds para indicar fim da calibração*/
Delay_ms(400);
//aguarda 400ms
PORTB = 28;
//apaga todos os leds de indicação
Delay_ms(400);
//aguarda
PORTB = 0;
trava=0;
////////////////// INÍCIO DO LOOP INFINITO ////////////////////
while(1)
{
//////////////////// VERIFICA FREQUENCIA /////////////////////
x = 0;
while (x < 15000) // tempo 150 ms
{
if (entrada == 1)
{
if (trava == 0)
{
trava = 1;
conta_freq = (conta_freq + 1);
}
}
else
if (entrada == 0)
trava = 0;
x++;
}
////////////////// FINAL DA VERIFICAÇÃO ///////////////////////
////////////////////////////////////////////////////////////////
///////////// ACUSA CASO FREQUENCIA VARIOU ////////////////
////////////////////////////////////////////////////////////////
/* caso quantidade de pulsos seja maior ou menor em 800 vezes da frequência calibrada*/
if (((conta_freq > (guarda_freq + 800))) || (conta_freq < (guarda_freq - 800)))
{
disparo_off = 0;
47
disparo_on = (disparo_on + 1);
//contador de frequência que variou
if (disparo_on > 5)
//verifica se freqüência variou 5 vezes seguidas
{
metal = 1;
//acusa que frequência variou
}
}
else
{
disparo_on = 0;
disparo_off = (disparo_off + 1);
//contador de frequência que não variou
if (disparo_off > 5)
//verifica se frequência ficou 5 vezes seguidas sem variar
{
metal = 0;
//acusa que frequência não variou
}
}
////////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////////
//////// VERIFICA SE BARREIRA ÓTICA FOI INTERROMPIDA ///////
////////////////////////////////////////////////////////////////
/* 963 indica 4,70 volts – caso portas analógicas das entradas sejam >= 963, então nada detectado
if (ADC_Read(0)>=963 && ADC_Read(1)>=963 && ADC_Read(2)>=963 && ADC_Read(3)>=963)
{
if (temp1 > 0)
temp1--;
if (temp1 == 0)
{
temp2 = var;
temp3 = var;
temp4 = var;
if (metal == 1)
{
PORTB = 28;
//apaga todos os leds de sinalização
PORTB.F4 = 0;
//acende led amarelo
}
else
PORTB = 28;
//apaga todos os leds de sinalização
}
}
////////////////////////////////////////////////////////////////
//////// VERIFICA SE BARREIRA ÓTICA FOI INTERROMPIDA ///////
/////////////////////// PARCIALMENTE /////////////////////////
////////////////////////////////////////////////////////////////
else
/* caso apenas uma barreira tenha sido interrompida */
if (((ADC_Read(0)<963 && ADC_Read(0)>144)
//144 = 0,70 volt
&& (ADC_Read(1) > 963)
&& (ADC_Read(2) > 963)
&& (ADC_Read(3) > 963))
||
48
((ADC_Read(1)<963 && ADC_Read(1)>144)
&& (ADC_Read(0) > 963)
&& (ADC_Read(2) > 963)
&& (ADC_Read(3) > 963))
||
((ADC_Read(2)<963 && ADC_Read(2)>144)
&& (ADC_Read(0) > 963)
&& (ADC_Read(1) > 963)
&& (ADC_Read(3) > 963))
||
((ADC_Read(3)<963 && ADC_Read(3)>144)
&& (ADC_Read(0) > 963)
&& (ADC_Read(1) > 963)
&& (ADC_Read(2) > 963)))
{
if (temp2 > 0)
temp2--;
if (temp2 == 0)
{
temp1 = var;
temp3 = var;
temp4 = var;
PORTB = 28;
//apaga todos os leds de sinalização
PORTB.F3 = 0;
//acende led verde
}
}
else
/* caso mais de uma barreira tenha sido interrompida */
if(((ADC_Read(0)<963 && ADC_Read(0)>144) && (ADC_Read(1)<963 && ADC_Read(1)>144))
|| ((ADC_Read(0)<963 && ADC_Read(0)>144) && (ADC_Read(2)<963 && ADC_Read(2)>144))
|| ((ADC_Read(0)<963 && ADC_Read(0)>144) && (ADC_Read(3)<963 && ADC_Read(3)>144))
|| ((ADC_Read(1)<963 && ADC_Read(1)>144) && (ADC_Read(2)<963 && ADC_Read(2)>144))
|| ((ADC_Read(1)<963 && ADC_Read(1)>144) && (ADC_Read(3)<963 && ADC_Read(3)>144))
|| ((ADC_Read(2)<963 && ADC_Read(2)>144) && (ADC_Read(3)<963 && ADC_Read(3)>144)))
{
if (temp3 > 0)
temp3--;
if (temp3 == 0)
{
temp1 = var;
temp2 = var;
temp4 = var;
PORTB = 28;
//apaga todos os leds de sinalização
PORTB.F3 = 0;
//acende led verde
}
}
////////////////////////////////////////////////////////////////
//////////// BARREIRA INTERROMPIDA TOTALMENTE ///////////
/////////////////////// PARCIALMENTE /////////////////////////
////////////////////////////////////////////////////////////////
49
else
{
if (temp4 > 0)
temp4--;
if (temp4 == 0)
{
temp1 = var;
temp2 = var;
temp3 = var;
PORTB = 28;
//apaga todos os leds de sinalização
if (metal == 1)
PORTB.F4 = 0;
//acende led amarelo
else
PORTB.F2 = 0;
//acende led azul
}
}
conta_freq = 0;
//zera o contador de pulsos
}
////////////////// FIM DO LOOP INFINITO //////////////////////
}
////////////////////////////////////////////////////////////////
//////////////// FIM DA FUNÇÃO PRINCIPAL ////////////////////
////////////////////////////////////////////////////////////////
50
9 CARACTERÍSTICAS E LIMITAÇÕES
Esta lixeira possui algumas características e limitações para seu correto
funcionamento, onde vale a pena citar:
a) o material, quando descartado na lixeira, demora um tempo de aproximadamente 2
segundos para ser identificado;
b) este detector de materiais é recomendado para materiais limpos e puros, onde haja
apenas um tipo de material, para que a detecção seja melhor efetuada;
c) deve ser jogado na lixeira, um material de cada vez, podendo ser jogado um novo
material apenas quando a lixeira estiver vazia;
d) o material a ser descartado na lixeira deve ter largura e comprimento de, no
máximo, 12cm x 18cm, respectivamente e altura mínima de 1,5cm.
51
10 TESTES DE VALIDAÇÃO
Diferentes tipos de materiais foram depositados na lixeira e testados a fim de verificar
qual seria o grau de acerto deles e tentar identificar quais os materiais que poderiam
apresentar mais erros. Eles foram depositados de diversas formas, sendo algumas vezes
jogados e outras vezes colocados, procurando que parassem em variadas posições,tentando
identificar quando é que eles poderiam ser identificados erroneamente ou não identificados.
Além de serem depositados de diferentes formas, foram também depositados de maneira
aleatória, ora variando a sequência do tipo de material, ora repetindo varias vezes o mesmo
material. No total foi realizado 200 testes, sendo 10 vezes de cada um, num total de 20 objetos
diferentes. O resultado foi bastante satisfatório, alcançando uma porcentagem de acerto de
93,5%, conforme pode ser visto no Quadro 6.
Quadro 6 - Testes realizados com diferentes tipos de materiais
Fonte: Fonte própria.
10.1 MOTIVO DOS ERROS
52
Para as sacolas claras e escuras, ocorreu o erro pelo fato de serem identificadas como
‘outros’, quando deveriam ser identificadas como plástico/vidro. Isso se deu pelo fato de nos
testes elas estarem muito diminuídas por serem amassadas e acabaram ficando muito opacas,
passando muito pouca luz através delas.
Para as garrafas de coca-cola, de chocomilk e de bebida, foi acusado erro pelo fato de
não serem detectadas. Estas garrafas são muito transparentes, e dependendo da forma que elas
ficam depositadas na lixeira, o detector ótico não consegue perceber a queda de tensão no
receptor, então o microcontrolador não toma nenhuma atitude.
53
11 CRONOGRAMA
Abaixo, na Figura 15, está inserido o cronograma com os nomes das tarefas, a duração
em dias úteis, a data de início e término de cada tarefa. Este cronograma foi desenvolvido
utilizando o software Project da Microsoft, a fim de poder ter uma melhor organização de
todas as etapas do projeto.
Figura 15 - Cronograma do projeto
Fonte: Fonte própria.
54
12 RISCOS
Mesmo tentando realizar um projeto com o mínimo de falhas, alguns riscos são
iminentes de acontecer, os quais são citados abaixo:
a) existe a chance de plásticos e vidros não serem identificados caso sejam
completamente transparentes, não diminuindo a quantidade de luz que chega do
emissor ao receptor, ou identificados erroneamente como outros caso sejam muito
opacos, bloqueando a luz que chega do emissor ao receptor;
b) caso o material metálico descartado possua pouca quantidade de metal, não
alterando a indutância da bobina de forma relevante a ponto de alterar a frequência
de oscilação do sensor detector de metais, pode ser erroneamente identificado como
‘outros’;
c) caso o material a ser identificado seja de tamanho muito pequeno, incapaz de
transpor ao menos uma barreira de luz
infravermelha, o material não será
detectado, com exceção de metais que podem ser percebidos pela alteração na
frequência do circuito LC;
d) se a lixeira estiver recebendo radiação de luz infravermelha de outras fontes, pode
comprometer a correta identificação dos materiais que dependem do sensor
infravermelho para serem identificados.
55
13 CONCLUSÃO
Obteve-se mais de 90% de acerto na detecção e identificação de diferentes materiais,
mostrando que o detector de materiais para uso na separação do lixo é de grande eficiência,
podendo ser um aliado na separação do lixo.
Foi pretendido fazer a identificação de variados tipos de lixo com a menor margem de
erro possível, e para isso, os sensores, em todo o seu conjunto foram calibrados e testados
inúmeras vezes com diferentes tipos de objetos buscando as mais variadas situações.
Muitos lixos são depositados em lixeiras impróprias dificultando a separação, e
consequentemente, prejudicando a reciclagem de muitos materiais que poderiam estar sendo
reutilizados. Uma ferramenta como esta, utilizando-a não apenas na identificação, mas
também na separação do lixo urbano, pode ser um grande aliado na separação e reciclagem do
lixo, tendo um impacto ambiental menos agressivo.
56
REFERÊNCIAS
ASSOCIAÇÃO BRASILEIRA DE CELULOSE E PAPEL. Disponível em:
<http://www.bracelpa.org.br/bra2/?q=node/172>. Acesso em: 23 jun. 2010.
COMPANHIA DE DESENVOLVIMENTO DE CAXIAS DO SUL. Disponível em:
<http://www.codeca.com.br/lixo_fique_por_dentro.php>. Acesso em: 05 mai. 2010.
COMPROMISSO EMPRESARIAL PARA RECICLAGEM. Disponível em:
<http://www.cempre.org.br/fichas_tecnicas.php?lnk=ft_plastico.php>. Acesso em: 22 jun.
2010.
COMPROMISSO EMPRESARIAL PARA RECICLAGEM. Disponível em:
<http://cempre.tecnologia.ws/fichas_tecnicas.php?lnk=ft_vidro.php>. Acesso em: 22 jun.
2010.
COMPROMISSO EMPRESARIAL PARA RECICLAGEM. Disponível em:
<http://www.cempre.org.br/fichas_tecnicas.php?lnk=ft_latas_aluminio.php>. Acesso em: 25
jun. 2010.
DYER, Judith. The History of Recycling Symbol: How Gary Anderson Designed the
Recycling Symbol. Disponível em: <http://www.dyerconsequences.com/recycling_symbol.html>. Acesso em: 15 jul. 2010.
ELECTRONICS DESIGN, STRATEGY, NEWS. Disponível em:
<http://www.edneurope.com/singleicformsinexpensiveinductancetester+article+1742+Europe.html>. Acesso
em: 12 out. 2010.
FRADEN, Jacob. Handbook of Modern Sensors: Physics, Designs, and Applications. 2 ed.
Springer, 2004.
INSTITUTO DO MANEJO E BIODIVERSIDADE. Disponível em:
<http://imbio2010.blogspot.com>. Acesso em: 03 dez. 2010.
MACÊDO, Marcelo; MACÊDO, Cácio. Campo Magnético e Força Magnética. Aracaju,
2003. (Apostila da disciplina de Física, Universidade Federal de Sergipe).
57
MARQUES, Angelo E. B. et al. Dispositivos Semicondutores: Diodos e Transistores. 2 ed.
São Paulo: Erica, 1996.
MARTINS, Nelson. Introdução à teoria da eletricidade e do magnetismo. 2 ed. São Paulo: E.
Blücher, 1975.
STUART, Barbara. Infrared Spectroscopy: Fundamentals and Aplications. 1 ed. Wiley,
2004.
TIPLER, Paul Allen. Física. 2. ed. Rio de Janeiro: Guanabara Dois, 1984. 2 v.
UNA. Disponível em: <http://blogs.una.br/vestibular_bh/2010/04/16/1%C2%AA-coletaseletiva-por-sons-do-pais-conheca-o-projeto-de-alunos-da-una-que-vai-auxiliar-deficientesvisuais>. Acesso em: 03 dez. 2010.
58
ANEXO A – DATASHEET LD271HL
59
ANEXO B – DATASHEET OPL 155 PTXC
60
ANEXO C – DATASHEET OPL 155XXXXC-15