TELESCÓPIO ROBÓTICO PARA LOCALIZAÇÃO DE CORPOS CELESTES
Israel Pinhero de Siqueira1, Amanda de Souza de Almeida1, Witenberg Rodrigues Souza1, Li Exequiel E.
López2
1
CENTRO UNIVERSITÁRIO INSTITUTO DE EDUCAÇÃO SUPERIOR DE BRASÍLIA - IESB
SGAS 613/614, Lotes 97 e 98
70.200-730 – Brasília – DF
2
PROJETO WIKITECA - CENTRO UNIVERSITÁRIO IESB
SGAS 613/614, Lotes 97 e 98
70.200-730 – Brasília – DF
Resumo: O artigo mostra o procedimento de criação de um
sistema de automação e controle, que será instalado junto a um
telescópio, com o objetivo de apontar para o ponto de
localização de um corpo celeste. São apresentados detalhes de
seu desenvolvimento, a construção da plataforma, os métodos
de localização por satélite, a programação da placa de
desenvolvimento Intel Galileu e a montagem dos motores
responsáveis pelo movimento do telescópio a partir da hora e
das coordenadas determinadas pela posição do telescópio no
globo terrestre. Um algoritmo foi desenvolvido pelos autores
do trabalho para calcular a posição exata do telescópio num
ponto do globo terrestre através de um módulo GPS e enviar as
coordenadas para os webservices das instituições onde serão
processadas e calculadas em tempo real, devolvendo para este a
localização precisa do corpo celeste, são usados os dados do
planetário virtual Stellarium. O algoritmo desenvolvido
também é capaz de processar os dados recebidos e controlar
dessa forma os movimentos dos motores de passo
interconectados ao telescópio que lhe permitam apontar de
forma precisa para o corpo celeste.
Palavras Chaves: Telescópio Robótico,
Automação e Controle, Astronomia.
Programação,
Abstract: The article shows the creation of an automation and
control system procedure, which will be installed next to a
telescope, in order to point to the point of location of a celestial
body. Details of their development are presented, platform
construction, satellite positioning methods, the programming of
the Intel Galileo development board and the assembly of
engines responsible for telescope movement from the time and
coordinates determined by the telescope position globe. An
algorithm was developed by the authors of work to calculate
the exact position of the telescope at a point of the globe
through a GPS module and send the coordinates to the web
services of the institutions where they will be processed and
calculated in real time by returning to this location needs
celestial body, are used virtual planetary data Stellarium. This
algorithm is also able to process the data received in this way
and controlling the movements of stepper motors
interconnected to the telescope to enable it to point precisely to
the celestial body.
Keywords: Robotic Telescope, Programming, Automation and
Control, Astronomy.
1
INTRODUÇÃO
Determinar de forma precisa a posição de um corpo celeste não
é um processo simples. O trabalho pretende responder à
pergunta: É possível automatizar um telescópio amador de tal
forma de transformá-lo num sistema autônomo para
localização exata de corpos celestes? O desafio do projeto foi
levar uma solução de alta precisão e baixo custo com uma
interface de alto nível e usabilidade para facilitar o acesso ao
estudo das leis da Física Gravitacional e Astronomia
especialmente aos alunos das escolas de ensino fundamental e
médio, para crianças, amadores e público em geral,
fomentando e incentivando a pesquisa científica.
O trabalho da construção do telescópio automatizado para
localização exata de corpos celestes usa a necessidade inerente
ao ser humano de entender sua origem e a origem do universo
[Gleisser, 2008], para incentivar alunos dos diferentes níveis de
ensino a ficarem mais próximos das ciências exatas, a
engenharia e áreas tecnológicas.
O objetivo do trabalho é construir uma base eletromecânica
automatizada para um telescópio de baixo custo e alta precisão,
integrada com motores de passo, o microcontrolador Intel
Galileo e um sistema de localização e transmissão de dados
completo, para interpretação da posição do telescópio no globo
terrestre, enviando os dados de referência para webservices
realizarem cálculos, retornando para o Galileo as coordenadas
espaciais da posição exata do corpo celeste a ser observado,
que responderá através dos motores de passo e permitirá ao
telescópio apontar exatamente para o corpo celeste escolhido.
Para determinar corretamente as coordenadas da localização do
corpo celeste para onde o telescópio deve apontar, alguns
cálculos precisam ser feitos como, por exemplo, determinar a
velocidade da rotação da terra no dia e horário e a trajetória do
corpo que se deseja observar. Para dar precisão ao movimento
do telescópio, dois motores de passo serão utilizados, um
executando o movimento num plano horizontal e o outro
efetuando o movimento num plano vertical, criando uma
rotação angular do telescópio de 360º. Esses motores são
controlados pela placa Intel Galileo que terá uma conexão com
um computador, onde o software necessário para escolha da
localização desejada estará instalado. Os dados de localização
do corpo celeste no sistema solar são adquiridos por meio do
Mostra Nacional de Robótica (MNR)
1
Jet Propulsion Laboratory da NASA (JPL) através do
departamento JPL Solar System Dynamics e do Institut de
Mécanique Céleste et de Calcul des Éphémerides (IMCCE), na
França, para localizar corpos fora do sistema solar, através de
um módulo GPS e de webservices específicos, concretamente
será usada a interface Stellarium.
economizar na montagem necessária. Existem vários tipos de
telescópios e ópticas utilizadas para observação astronômica,
entre eles se destacam: (i) Refletor (ou Newtoniano), (ii)
Refrator e (iii) Catadióptrico (Cassegrain). O telescópio
escolhido para ser usado no projeto é o Skywatcher MaksutovCassegrain 90 mm com tripé EQ1 (Figura 1).
O projeto envolve áreas da Engenharia de Computação,
Engenharia Eletrônica, Engenharia Mecânica Física e
Astronomia. A Engenharia de Computação é necessária na
implementação da linguagem de programação para execução
de rotinas e cálculos de localização e controle do telescópio.
Da Engenharia Eletrônica são usados controladores de drivers
para efetuarem tarefas definidas por algoritmos. Por fim,
fundamentos de Engenharia Mecânica são usados para a
composição dos materiais e movimentos mecânicos
empregados como o movimento rotacional dos motores, eixos
de direção e eixos de sustentação e equilíbrio do telescópio.
O artigo está organizado da seguinte forma: a seção 2 apresenta
uma descrição do trabalho, a escolha do telescópio, a
modelagem da nova base, a escolha do sistema de coordenadas
e a interface Stellarium. A seção 3 descreve os materiais e
métodos utilizados no trabalho. Os resultados, os desafios e a
solução dos problemas são apresentados na seção 4, e as
conclusões do trabalho são apresentadas na seção 5.
2
O TELESCÓPIO ROBÓTICO
O telescópio robótico consiste na construção de uma base
eletromecânica de automação e controle para um telescópio de
baixo custo e alta precisão, integrada com motores de passo,
um microcontrolador Intel Galileo e um sistema de localização
e transmissão de dados completo para receber os valores via
GPS e interpretar a posição do telescópio no globo terrestre,
enviando os dados de referência para webservices realizarem
cálculos, retornando para o microcontrolador as coordenadas
espaciais da posição exata do corpo celeste a ser observado,
este responderá através dos motores de passo, o que permitirá
ao telescópio alguns movimentos para apontar exatamente para
o corpo celeste escolhido (planetas do sistema solar, satélites, e
outros).
Figura 1 – Telescópio Skywatcher Maksutov-Cassegrain.
2.2
A Estrutura da Base do Telescópio
O telescópio com a ótica Cassegrain foi escolhido pelo seu
tamanho reduzido, a portabilidade e excelente qualidade nas
observações. As Especificações do telescópio são: (i) Abertura:
90 mm; (ii) Distância focal: 1250 mm (iii) Razão focal: 13.8
(iv) Maior Ampliação Útil: 200×. O único ponto negativo é que
o telescópio vem com uma montagem equatorial e torna-se
necessário fazer uma adaptação, construir uma base, para uso
em coordenadas azimutais. Na Figura 2 pode-se observar a
planta da nova base para o telescópio.
Associada às tarefas definidas neste trabalho, está a de
proporcionar ao público uma visão ampla das possibilidades e
influências que a tecnologia oferece à sociedade na forma de
experiências reais e demonstrações. Toda a movimentação do
telescópio é proporcional a sua massa e aos componentes nele
instalado, é leve para uma fácil movimentação e uma resposta
mais rápida, de baixo custo, móvel e poderá ser usado em
qualquer ponto geográfico terrestre.
O trabalho foi realizado em três etapas: (i) pesquisa do
telescópio e do sistema de coordenadas a serem usados, assim
como da plataforma Stellarium, (ii) criação dos algoritmos e
programação Phyton da placa Intel Galileo e (iii) montagem da
nova base a ser acoplada ao telescópio. O desenvolvimento do
trabalho constituiu uma prática pedagógica de caráter técnico e
acadêmico-científico que poderá incentivar aos alunos do
ensino fundamental e médio e público em geral a se aproximar
da astronomia, engenharia e a tecnologia, em geral.
2.1
A Escolha do Telescópio
Um dos desafios do projeto foi escolher um telescópio de
qualidade, com uma montagem fácil e preço acessível. Porém,
se tratando de lentes e telescópios a qualidade esta diretamente
relacionada ao preço. Foi decidido adquirir um telescópio para
iniciantes em astronomia, com uma boa abertura, procurando
Mostra Nacional de Robótica (MNR)
Figura 2 – Planta para a construção da base do Telescópio.
2.3
A Escolha do Sistema de Coordenadas
Existem no mercado três tipos de montagem de um telescópio:
Equatorial, Azimutal e Dobsoniana. Cada uma com suas
características definidas pelo sistema de coordenadas usado. O
sistema Equatorial é muito usado em astronomia (Inclusive
pela interface Stellarium) porque tem como plano fundamental
o plano da eclíptica (uma linha reta passando entre o sol e o
plano do sistema solar) sendo capaz de mapear astros
suficientemente distantes da terra de forma igual para qualquer
observador localizado no planeta.
O grande desafio da montagem equatorial (pensando em alunos
e iniciantes em observações astronômicas) é a dificuldade de
montar e preparar o equipamento para observação. É preciso
um estudo prévio das coordenadas celestes além de certa
precisão na montagem e uso do telescópio; muitas vezes esse
fato desestimula os alunos e amadores. Já o sistema de
coordenadas Azimutal e o Dobsoniano (uma variação do
Azimutal), ambos são medidos em termos de coordenadas
terrestres, sendo fixos na terra e não nas estrelas; isto significa
que os astros não têm posição fixa por causa do movimento
terrestre. O mesmo corpo celeste terá valores de coordenadas
diferentes para cada observador em pontos diferentes na terra.
No desenvolvimento do trabalho foi escolhido o sistema de
coordenadas azimutal pela facilidade de estudo e compreensão
pelos alunos e iniciantes em observações astronômicas. Para
usar este sistema foi preciso a elaboração de um algoritmo de
conversão de coordenadas em tempo real que recebe do
Stellarium as coordenadas celestes do objeto e as converte a
coordenadas azimutais, de acordo com a latitude, longitude e
hora do observador e transmite para os motores de passo o
movimento para o posicionamento correto do telescópio,
tornando tudo mais simples. As equações de transformação
serão elucidadas na seção de desenvolvimento do algoritmo.
2.4
A Interface Stellarium
Stellarium é um planetário virtual (Figura 3) de código aberto
para computador [Planetário Virtual, 2014]. Ele mostra um céu
realista em três dimensões, igual ao que se vê a olho nu, com
binóculos ou telescópio. Por ser multiplataforma (pode ser
instalado em Windows, Linux e MacOs), tornou-se a escolha
ideal para constituir a interface do projeto.
servidor de comunicação e realizar os cálculos complexos das
transformações de coordenadas em tempo real, ele precisava
controlar toda a eletrônica do projeto. Foi escolhida a placa
Intel Galileo (Figura 4) que dispõe de um processador Intel®
Quark SoC X1000 de 32 bits (mais rápido que todas as outras
placas de desenvolvimento existente no mercado).
Figura 4 – Placa Intel Galileo.
Essa plataforma oferece a facilidade de desenvolvimento da
arquitetura Intel por meio de suporte para os sistemas
operacionais Microsoft Windows*, Mac OS* e Linux*
possibilitando programar em qualquer linguagem de
programação, inclusive Python que é uma linguagem
extremamente rápida e versátil para trabalhar com sockets
e transferência de dados, controle de motores, entre outras
vantagens.
3.2
Motor de Passo e Driver
Para a execução do projeto foi escolhido o motor de passo
28BYJ-48 (Figura 5), que possui ótimo torque, unipolar,
alimentação de 5V e redução de 1/64, isto significa que é
possível dar uma volta completa com 4096 passos, ou seja,
apenas ~0,088° por passo. Outras especificações do motor
incluem: (i) Caixa de Redução: 1/64; (ii) Diâmetro do eixo:
3mm; (iii) Ângulo do Passo: 5,625°/64 ~ 0,088°; (iv)
Frequência: 100Hz; (v) Resistência DC: 50 Ω ± 7% (25℃); (vi)
Torque: 34,3 mN.m; (vii) Peso: 40 g.
O driver ULN2003 é um driver de corrente que permite o
Galileo controlar motores com correntes superiores a 50 mA,
neste caso até 500 mA. Este módulo possui LEDs que indicam
o acionamento das bobinas e opera com tensões de 5-12 V.
Figura 3 – Mapa celeste (Fonte: stellarium.org).
3
MATERIAIS E MÉTODOS
Dentre os materiais para o desenvolvimento do telescópio
robótico estão: Telescópio Skywatcher Maksutov-Cassegrain, a
Placa microcontroladora Intel Galileo, Motores de Passo e
Drivers.
3.1
A Placa Intel Galileo
Figura 5 – Motor de passo + driver.
Para o desenvolvimento do trabalho foi preciso um
microcontrolador potente e versátil, além de atuar como
Mostra Nacional de Robótica (MNR)
3
3.3
Firmware
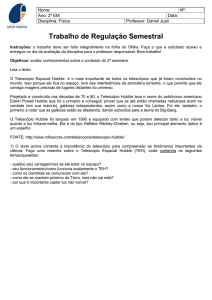
A Figura 6 é um fluxograma mostrando o funcionamento da
lógica de programação (conjunto de instruções operacionais
programadas diretamente no hardware do equipamento
eletrônico) executada pelo microcontrolador Galileo.
feito exatamente ao receber os dados, antes de qualquer
cálculo. (iii) Neste trecho do código recebem-se os dados
enviados pelo Stellarium e são salvos na variável data0, depois
é feita a conversão dos dados usando o método
ConstBitStream e seus dados são lidos nas variáveis ra,
ra_uint, dec e dec_uint.
Figura 7 – Stellarium mostrando as coordenadas de
localização do planeta Saturno.
Figura 6 – Fluxograma das instruções operacionais na
placa Calileo.
4
4.1
RESULTADOS E DISCUSSÃO
Desenvolvimento do Servidor Galileo
No desenvolvimento do Servidor Galileo/Linux para
comunicação com o Stellarium, foi escolhido Python como
linguagem de programação para o sistema, por diversos
motivos. Um deles é que Python é de acesso livre e de código
aberto o que vai de acordo com os ideais do projeto,
multiplataforma (roda em Linux, Windows, Mac), uma
linguagem simples e de desenvolvimento rápido.
Definido o Python como linguagem de programação da placa
Galileo, continuou-se para a análise e integração do Servidor
(Galileo) com a Interface (Stellarium), feita através de uma
comunicação Ciente > Servidor em TCP/IP. Foi preciso
estabelecer um socket que é uma conexão assíncrona entre
Stellarium e Galileo, para isso foi usada uma biblioteca nativa
do python chamada asyncore para gerenciar as requisições.
A classe Telescope_Server é responsável por gerenciar a
conexão e os sockets de comunicação entre o servidor Galileo e
o Stellarium, nela foi definido o IP do Galileo na rede para
conexão. É uma classe estática que gerencia as conexões, a
cada nova mensagem de dados do Stellarium (quando o usuário
pressionar crtl+1 para enviar os dados do corpo celeste
selecionado) essa classe recebe e redireciona para a classe
Telescope_Channel.
4.2
Recepção de dados do Stellarium
O protocolo usará apenas um tipo de mensagem entre o
servidor (Galileo) e o cliente (Stellarium), definido da seguinte
forma: (i) A Classe responsável por fazer o gerenciamento dos
dados e das mensagens recebidas é a Telescope_Channel. O
método que recebe estes dados está especificado como
handle_read nesta mesma classe. (ii) Os dados são
transmitidos em Bytes o que trouxe a necessidade de usar uma
biblioteca do python chamada bitstream que converte os dados
em binário para String (texto simples). Este tratamento deve ser
Mostra Nacional de Robótica (MNR)
4.3
Algoritmo de Conversão de unidades e
coordenadas
Os dados recebidos dos satélites vêm todos em coordenadas
equatoriais, que para uma construção automatizada, a
dificuldade de implementação é muito maior. Por este motivo,
a conversão para coordenadas azimutais torna-se necessária.
Este
algoritimo
esta
implementando
na
classe
transformar_coordenadas no arquivo coords.py (mostrado
no Anexo I).
Ao executar, o algoritmo de conversão recebe os dados
originais em coordenadas equatoriais. Neste formato, os dados
vêm com a medida de hora (10h57m35.16s). Para localização
do astro, são identificados dois dados principais: hora angular
(alfa) e declinação. Pelo fato desses valores serem globais, o
algoritmo não pode aplicá-los diretamente para o movimento
do telescópio. Para isso, é necessário receber também os dados
de latitude, longitude e tempo sideral da localização do
telescópio.
O formato recebido é String, pois os dados possuem
identificadores de horas, minutos e graus. Para o algoritmo
poder trabalhar com esses dados, primeiramente executa uma
conversão, passando esses valores em String para Double,
convertendo já para radianos. Para facilitar essa conversão, um
método foi criado, recebendo cada dado por separado e
retornando seu valor em radiano.
Com todos os dados prontos (hora angular aplicada,
declinação, latitude e longitude), a conversão de coordenadas
equatoriais para coordenadas azimutais pode ser finalizada. O
método que realizará as funções de conversão é baseado em
senos e cossenos, recebendo alguns dos dados supracitados e
retornando o azimute (movimento horizontal angular) e a
altura (movimento vertical angular).
Após a função de senos e cossenos, aplica-se a função inversa
do valor final para retornar ambos os valores de azimute e
altura. Com esses dados, é possível executar um movimento
livre do telescópio, nos três eixos. Com essa classe escrita é
possível de se converter as unidades logo após os dados do
Stellarium serem recebidos, assim como converter os dados em
String e salvar nas variáveis az (azimute) e alt (altitude). A
Figura 8 mostra um dos códigos desenvolvidos nesta parte.
class transformar_coordenadas:
def __init__(self, dec, ra):
self.today = datetime.utcnow()
self.lgt = -0.8299860897981474
self.lat = -0.2699099153798746
self.dec = radians(dec)
self.ra = radians(ra * 15)
def get_azi_alt(self):
return (transformar_coordenadas.get_horizontal_angle(self),
transformar_coordenadas.get_vertical_angle(self))
telescópio de volta para o Stellarium, para o usuário saber com
facilidade exatamente para onde o telescópio está apontando.
Para enviar os dados, novamente é preciso converter todos eles
para o sistema binário usando o método ConstBitStream.
Desta forma o telescópio sempre terá sua ultima coordenada
salva, para uma melhor visualização do usuário no Stellarium e
um melhor posicionamento do primeiro no espaço.
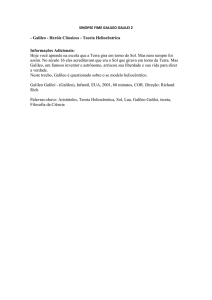
A Figura 9 mostra um dos testes realizados com a interface
Stellarium, a placa Galileo e os motores de passo.
# restorna angulo horizontal/azimute
def get_horizontal_angle(self):
dec = self.dec
lat = self.lat
hra = transformar_coordenadas.hour_angle(self)
alt = transformar_coordenadas.get_vertical_angle(self)
hra = radians(hra)
alt = radians(alt)
res = acos ( ( sin(dec) - sin(lat) * sin(alt) ) /
( cos(lat) * cos(alt) ) )
if sin(hra) > 0.0:
res = 2.0 * pi - res
return degrees(res)
# retorna angulo vertical/altura
def get_vertical_angle(self):
lat = self.lat
dec = self.dec
hra = transformar_coordenadas.hour_angle(self)
hra = radians(hra)
res = asin ( sin(dec) * sin(lat) +
cos(dec) * cos(lat) * cos(hra) )
return degrees(res)
x = transformar_coordenadas(dec, ra)
az, alt = x.get_azi_alt()
Figura 8 – Um dos códigos de programação elaborados.
4.4
Envio dos Sinais para os Motores
Para o controle dos motores de passo foi usada uma biblioteca
auxiliar do Stephen C. Phillips [Stephen's Home Page, 2015]
com algumas alterações para se adequarem à necessidade do
projeto, nele a biblioteca está localizada no arquivo motor.py
(mostrado no Anexo II).
Figura 9 – Stellarium, Galileu e motores de passo, prontos
para um teste.
4.6
Desafios e Solução de Problemas
Uma das dificuldades encontradas aconteceu após a montagem
e programação da placa Galileo, no início dos testes com os
motores do telescópio. A Galileo recebeu uma atualização online da Intel que trocou o número das portas de saída e entrada
(GPIO). Posteriormente a essa atualização e ao realizar outros
testes, a placa travou e alguns dos seus componentes
queimaram. Além do custo para a aquisição de uma placa nova
houve um problema com a disponibilidade da placa no Brasil,
o que atrasou em aproximadamente um mês a continuidade do
trabalho. Posteriormente a placa foi adquirida e o sistema
inteiro foi programado novamente.
5
CONCLUSÕES
O trabalho está praticamente finalizado. Todo o
desenvolvimento do sistema de conversão de coordenadas, a
programação do servidor, a integração do Galileo com o
Stellarium e o controle dos motores foram testados e
concluídos, faltando apenas a construção da base do telescópio
para otimização dos movimentos deste. Um protótipo em
menor escala com uma caneta laser está sendo concluído para
demonstrar o funcionamento e mapear os objetos no céu.
Com o azimute e a altitude já em graus foi criada uma instância
para os motores e definidos os pinos aos quais eles estão
conectados. Foi definida a velocidade dos motores (escolhou-se
5 rpm por ser uma velocidade segura para preservar a placa
Galileo) e foi usado o método move da classe Motor para
posicionar o telescópio no angulo desejado.
A conclusão prevista para as próximas semanas do protótipo
permitirá o funcionamento integral do telescópio e a precisão
deste na localização dos corpos celestes, que deverá estar
pronto para apresentação na Mostra Nacional de Robótica 2015
a ser realizada no mês de outubro.
Foi tomado o cuidado de salvar a posição anterior do telescópio
para este não precisar voltar para a posição original todas as
vezes que um sinal fosse enviado com uma coordenada nova.
Assim, o telescópio deverá continuar seu movimento a partir de
onde parou.
O projeto proporcionou um grande conhecimento nas diversas
áreas de engenharia, transmitindo uma experiência ampla em
circuitos elétricos, programação, transmissão, eletrônica e
montagem mecânica, conhecimentos que os alunos autores do
artigo esperavam aprender unicamente ao final do curso,
porém, que foram aplicados no desenvolvimento do telescópio
robótico ao longo de seu processo de automação e controle.
4.5
Envio das Coordenadas do Telescópio
para o Stellarium
Após os cálculos de posicionamento, os métodos act_pos e
move deverão cuidar da atualização da posição real do
Mostra Nacional de Robótica (MNR)
5
AGRADECIMENTOS
Ao Programa Institucional de Bolsas de Iniciação em
Desenvolvimento Tecnológico e Inovação (PIBITICNPq)
pela bolsa concedida e ao Programa de Iniciação Científica do
Centro Universitário IESB pela oportunidade.
REFERÊNCIAS BIBLIOGRÁFICAS
COUPER, Heather e HENBEST, Nigel. Big Bang: A História
do Universo. Editora Moderna. São Paulo. 2008.
FEYNMAN, RICHARD, P., Lições de Física, volumes 1, 2 e
3, Ed. Bookman, Porto Alegre. 2008.
Galileo
and
Einstein.
Disponível
em:
http://galileoandeinstein.physics.virginia.edu/lectures/ne
wton.html. Acesso em 10 de maio de 2014.
GLEISSER, Marcelo. A dança do Universo. Editora Schwarcz
Ltda. São Paulo. 2008.
HAWKING, Stephen. O Universo numa Casca de Noz. Editora
Arx. São Paulo. 2010.
Institut de Mécanique Céleste et de Calcul des Éphémerides
(IMCCE).
Disponível
em:
http://www.imcce.fr/langues/en/. Acesso em 30 de abril.
Intel
do
Brasil.
Disponível
em:
http://www.intel.com.br/content/www/br/pt/homepage.h
tml. Acesso em: 21 de maio de 2014.
NASA
- Jet Propulsion Laboratory. Disponível em:
http://ssd.jpl.nasa.gov/. Acesso em 30 de março de
2014.
Planetário
Virtual
Stellarium.
Disponível
em:
http://www.stellarium.org/. Acesso em: 30 de abril de
2014.
Plans to buid a sidewalk telescope: Disponível em:
http://www.cdcc.usp.br/cda/telescopios/tie-jplnasa/index.html. Acesso em 10 de abril de 2014.
Stephen's Home Page: Disponível em: http://scphillips.com/.
Acesso em 05 de março de 2015.
ANEXOS
I: coords.py
Mostra Nacional de Robótica (MNR)
II: motor.py
Mostra Nacional de Robótica (MNR)
7