Escola Superior de Tecnologia de Setúbal
Sistemas Dinâmicos
1º Teste – 16 / Nov. / 2004
Inclua na folha de prova todos os cálculos e considerações que tiver de fazer
Problema 1 (4v)
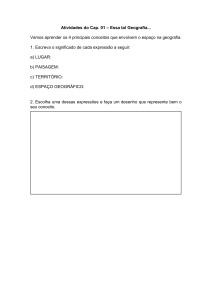
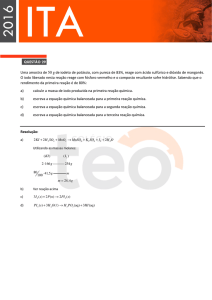
a) Considere o circuito eléctrico da figura, (entrada vs, saída vo).
L
+ R
0
Escolha as variáveis de estado. Obtenha a equação de estado (eq.
s
C
R
dinâmica + eq. saída), indicando todos os passos da resolução.
Use: R=5, C=2 e L=4.
b) Para o sistema com a função de transferência dada, defina variáveis de
Y (S )
2S 2 5
fase e escreva a equação de estado completa. Apresente todos os passos da
U ( S ) S 3 3S 2 2S 4 resolução. Desenhe o diagrama de blocos correspondente.
Problema 2 (5v)
Considere um sistema com a seguinte equação de estado:
1
0
a) Obtenha a matriz de transição pelo método da diagonalização. dx(t ) 0
x(t ) u (t )
b) Confirme esse resultado usando o método de Cayley-Hamilton. dt
2 3
5
c) Obtenha a solução homogénea de x(t) para condições iniciais:
y (t ) 4 0x(t )
i) x(0)=[1 0] T ; ii) x(0)=[1 -2] T.
Como se pode explicar o aparecimento de apenas um dos modos num dos casos.
Problema 3 (4v)
a) - Calcule a parte forçada da solução do sistema do problema 2 para uma entrada salto unitário.
b) - Escreva a expressão da solução total de x(t) (homogénea + forçada) para a condição (c-i) do
problema 2.
1
0
Problema 4 (5v)
0
Considere um sistema com a seguinte matriz da dinâmica:
A 0
0
1
a) Escreva a sua equação característica e calcule os valores próprios e
2 5 4
vectores próprios. Organize estes na matriz modal.
b) Escreva a matriz de Jordan (J) pondo em evidências cada um dos seus blocos.
c) Escreva a matriz eJt com a mesma relevância de blocos e escreva um expressão para o cálculo da
matriz de transição com os elementos já calculados. (Não necessita efectuar o seu cálculo).
d) Escreva a expressão para o cálculo da matriz de transição pelo resultado do teorema de CayleyHamilton. Escreva as equações que lhe permitem calcular os coeficientes envolvidos nessa expressão
e indique com os calculava.
Problema 5 (2v)
Pretende-se linearizar um sistema em torno de um ponto de funcionamento x0, dado pelas expressões:
2
x1 (t ) 4 x1 (t ) x 2 (t ) 5u (t )
x 2 (t ) 3x1 (t ) 2 x1 (t ) x 2 (t ) ; x x1 x 2 T ; x0 2 4T .
Proceda à sua linearização na vizinhança de x0. Escreva a equação de estado linearizada na forma
matricial. Considere que a saída y(t)=x1(t).
Automação, Controlo e Instrumentação (7ºS) - SD- 1ºTeste (2004-2005)
1
Escola Superior de Tecnologia de Setúbal
Resolução (SD-ACI- 1º Teste – Nov/2004)
1 1
1
dx(t ) RC
C
x(t ) RC v s (t )
v c
1
R
;
x
dt
i =
0
L
L
L
y (t ) 1 0x(t )
P1.a)
1
1
1
dx(t ) 10 2 x(t ) 10 v s (t )
0
5
1
dt
4 4
y (t ) 1 0x(t )
1
0
0
0
dx(t )
0
0
1 x(t ) 0 v s (t )
dt
4 2 3
1
y (t ) 5 0 2x(t )
b)
P2. a) val. pr.: {-1 ; -2}; vect. pr.: v1=[1 -1]T; v2=[1 -2]T;
1
2e t e 2t
e t e 2t
1
2 1
1 0
1
t
M v1 v 2 ; M
;
M
;
;
e
1 1
0 2
t
2t
e t 2e 2t
1 2
2 e e
Fazendo: d1= e-t; d2= e-2t
d1 d 2 2e t e 2t
1 d1 0 2 1 2d1 d 2
e t e 2t
1
e At Me Dt M 1
.
.
t
2t
e t 2e 2t
1 2 0 d 2 1 1 2d1 2d 2 d1 2d 2 2 e e
1 t 1 1 2t
2
e At
e 2 2 e
2 1
2e t e 2t
e t e 2t
= 0 + 1 ; 0=2e - e ); 1=e - e ; e
t
2t
e t 2e 2t
2 e e
2
1
1
c) i) xh (t ) e t e 2t , t 0 ; ii) xh (t ) e 2t , t 0 ;
2
2
2
b) et
-t
t
P3. a) x f (t ) e
0
A( t )
-2t
-t
-2t
At
5 1 e t 5 1 e 2t 52 5 t 52 2t
Bu ( )d
e e , t 0
5 1
10 2
0 5
5
2 t 1 2t 52 5 t 52 2t 52 1 t 1 3e 2t
b) x(t ) xh (t ) x f (t ) e e e e 3e
,t 0
2
2
2 2
0 5
5
0 1
P4. a) Eq. Caract.: 3+42+5 +2=0; 1,2,3={-2,-1, -1}; eAt=MeJtM-1
e 2t 0
1
1
2
1
0
0
1
1
2 0
1
Jt
t
M 2 1 0 ; M 2 5 2 ; J 0 1 1 ; e 0 e
te t
0
1 1
3
1
0 1
0 e t
4
2
0
P5.
2
x1 (t ) 4 x1 (t ) x 2 (t ) 5u (t )
df 8x1
x´=f(x,u);
dx 3
x 2 (t ) 3x1 (t ) 2 x1 (t ) x 2 (t ) ; x x1
1 df 5
;
; Eq. Lineariz.:
2 x2 du 0
x 2 ; x0 2 4 .
T
T
dx(t ) 16 1 x(t ) 5u (t )
3 8
0
dt
y (t ) 1 0x(t )
Automação, Controlo e Instrumentação (7ºS) - SD- 1ºTeste (2004-2005)
2