Uma pastilha de um microprocessador contém um conjunto de pinos, através dos
quais é feita toda a comunicação externa. Estes pinos são usados para receber sinais de
fora para dentro do processador, para enviar os sinais do processador para fora, ou para
fazer ambas. Entendendo as funções dos pinos de um processador, podemos saber como é
feita a interação do processador com a memória e com dispositivos de E/S.A pinagem do
processador pode ser dividida em três tipos: endereço, dado e controle.Estes pinos são
conectados a pinos similares das memórias e pastilhas de E/S através de um conjunto de
fios paralelos denominados de barramento,
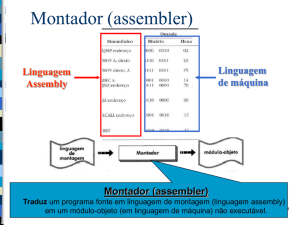
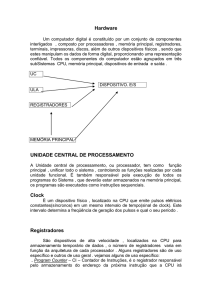
FUNÇÕES BÁSICAS DE UMA UCP
O processador é o componente principal de um sistema de computação. É
responsável pela realização das operações de processamento e de controle, durante a
execução de um programa. Um programa para ser executado pelo processador deve ser
formado por uma série de instruções de máquina. Para iniciar a execução de um
programa, as instruções devem ser armazenadas na memória principal. A operação da
UCP consiste em:
Buscar uma instrução da memória (operação de leitura), uma de cada vez;
Decodificar a instrução, para determinar o tipo de operação a ser realizada, por
exemplo: soma, multiplicação, leitura ou escrita na memória, mover dados de um lugar
para o outro, etc;
Se as instruções utilizarem dados, buscá-los onde estiverem armazenados para
que a UCP possa processá-los;
Executar a operação com os dados e guardar o resultado, se houver, no local
especificado;
Reiniciar o processo, buscando a próxima instrução.
Estas etapas consistem do ciclo de instrução. Este ciclo se repete até que seja
encontrada alguma instrução de parada, o sistema seja desligado ou ocorra algum tipo de
erro. A UCP é projetada para executar sucessivamente, operações básicas na seqüência
definida pelo programa. As atividades realizadas pela UCP podem ser divididas em duas
categorias:
Processamento
Controle
COMPONENTES PRINCIPAIS DE UMA UCP
1. Unidade Lógica e Aritmética
É um dispositivo lógico, interno à UCP, cuja função é realizar as operações
aritméticase lógicas requeridas nas instruções de máquina
2. Registradores
Um dado a ser enviado para a ULA, é armazenado temporariamente em um
determinado registrador interno da UCP. Além disso, o resultado de uma operação
realizada pela ULA também é armazenado em um registrador, de maneira que possa ser
executado por alguma outra instrução ou para que possa ser transferido para a memória.
A UCP contém uma pequena memória, de alta velocidade, usada para armazenar
resultados temporários e certas informações de controle. Esta memória é formada por um
certo número de registradores, cada um com uma dada função. Um registrador é
basicamente uma palavra de memória interna ao processador. A diferença é que acesso a
um registrador é muito mais rápido que o acesso a qualquer palavra de memória externa
ao processador. Em geral, o número de bits que os registradores internos de uma UCP são
capazes de armazenar é igual ao número de pinos do barramento de dados, ou seja, o
número de bits que o processador é capaz de tratar de uma só vez. O processador 8086,
possui registradores de 16 bits, ao passo que o 80486 possui registradores de 32 bits.
A quantidade de registradores empregados em uma UCP, variam de processadores
para processadores. Um desses registradores é o Acumulador (ACC), cuja função básica
é servir como elemento básico de ligação entre a ULA e os demais dispositivos da UCP.
Existe dois registradores internos ao processador que funcionam em conjunto na
execução das instruções de um programa. O registrador de instrução IR (instruction
register ) armazena o código da instrução que está sendo executada, enquanto que o
registrador apontador de instruções IP (instruction pointer ) contém o endereço de
memória da próxima instrução a ser executada. O usuário não tem acesso direto a estes
dois registradores internos. O Registrador de Estado (RST) Armazena códigos de
condição gerados pela ULA e eventualmente, sinais de interrupção gerados por
dispositivos de Entrada e Saída. Os registradores REM (registrador de endereço de
memória) e RDM (registrador de dados de memória) são usados para efetuar a
comunicação com a memória.
3 Controle
A área de controle de uma UCP é a parte que realiza as seguintes atividades:
* Busca de instrução que será executada, armazenando-a em um registrador
especialmente
projetado para esta finalidade: Registrador de Instrução.
* Interpretação das ações que serão processadas durante a execução da instrução.
Por exemplo, se é uma soma, um complemento, etc.
* Geração dos sinais de controle apropriados para a execução da instrução identificada. Sinais estes que são enviados aos diversos componentes do sistema, sejam
eles internos ou externos.
A parte de controle é projetada para identificar o que deve ser feito, como deve ser
feito e enviar os sinais apropriados para os dispositivos que serão utilizados, no tempo
adequado.
Os dispositivos da UCP responsáveis pelo controle são:
* Unidade de Controle (UC);
* Decodificador de Instrução;
* Registrador de Instrução (IR);
* Contador de Instruções (PC);
* Relógio;
* Registradores de Endereço (REM) e de dados (RDM).
Relógio (clock)
Dispositivo usado para gerar pulsos cuja duração é chamada de ciclo. A
quantidade de vezes em que o pulso se repete durante um segundo, chama-se freqüência,
que também é usada para definir a velocidade de uma UCP.
Um ciclo de relógio ou de máquina é o intervalo de tempo entre o início de um
pulso e o início do seguinte. Este ciclo é relacionado à realização de uma operação
elementar, durante o ciclo de uma instrução. Mesmo uma operação elementar não se
realiza em uma só etapa e, por isso, costuma-se dividir o ciclo de máquina em ciclos
menores (subciclos), que são defasados no tempo, de modo que, cada subciclo aciona um
passo diferente da operação elementar.
A unidade de medida para a freqüência dos relógios é o Hertz (Hz), que significa
1 ciclo por segundo. Como os valores de freqüência são elevados, abreviam-se estes
valores usando-se “Milhões de Hertz” (MHz). Assim, se um processador trabalha a 25
MHz, a duração do ciclo é de 40 nanosegundos.
PIPELINE
Ao descrever o funcionamento da UCP, na realização de seus ciclos de instrução
observa-se que, embora o ciclo de instrução seja composto de várias etapas, ele é
realizado basicamente de forma seqüencial, isto é, uma etapa se inicia após a conclusão
da anterior. UCPs deste tipo vêm sendo usadas desde as primeiras gerações de
computadores, e muitos aperfeiçoamentos tecnológicos foram introduzidos para reduzir o
tempo de processamento de uma instrução, entre os quais o aumento tecnológico do
relógio e a tecnologia de semicondutor, com seus sucessivos melhoramentos em
fabricação e miniaturização. Uma outra metodologia, usada há muito tempo pelas
fábricas de automóvel e por inúmeras outras indústrias, consiste em dividir o processo de
fabricação em estágios independentes, que, por isso, podem se superpor uns aos outros,
no tempo. Denomina-se linha de montagem ou pipeline. Em computação, a metodologia
de construção da UCP composta de estágios permitiu que, também nestes sistemas, se
adotasse esta técnica. A característica principal do processo de “pipelining” reside em
duas premissas básicas:
a) divisão do processo (seja o de fabricação de um automóvel, de uma TV ou ciclo de
uma instrução na UCP) em estágios de realização independentes um do outro; e
b) um novo produto inicia seu processo de fabricação ou execução depois de o anterior
concluir seu processo.
EVOLUÇÃO DOS MICROPROCESSADORES
8086
8088
80286
80386
80486
AMD Am 5x86
Cyrix Cx 5x86
Pentium
Pentium Pro
Pentium MMX
Pentium II
CELERON
Pentium III
AMD X5
AMD K5
AMD K6
CYRIX
Pentium IV
PROCESSADORES RISC E CISC
Durante grande parte da história dos computadores pessoais, os modelos
predominantes de microprocessadores têm sido da Intel Corporation. O primeiro
processador IBM PC foi o Intel 8086. As gerações de processadores Intel que o seguiram
forma da família ’86.
Todos eram versões mais elaboradas do 8086 original, mas com desempenho melhorado
por uma de duas maneiras — operando mais rapidamente ou ratando mais dados
simultaneamente. O 8088, por exemplo, operava a 4,7 milhões de oscilações por segundo
— e alguns chips Pentium ultrapassam 500 MHz. Já o 8088 podia tratar 8 bits de dados
por vez, enquanto o 80486 trata 32 bits internamente. Mas apesar das alterações, os
processadores Intel até o 80486 eram baseados em uma filosofia de projeto denominada
CISC, do inglês
“complex instruction set computing”, ou computação por conjunto
complexo de instruções.
O projeto CISC emprega comandos que incorporam muitas pequenas instruções
para realizar uma única operação. É um facão no sentido de retalhar e fatiar dados e
código. Uma alternativa de projeto, por comparação, funciona mais como um bisturi,
cortando pedaços menores e mais delicados de dados e código. O bisturi chama-se
“reduced instr uctions set computing”, RISC, ou computação por conjunto reduzido de
instruções. Projetos RISC são encontrados em processadores como o Alpha da DEC,
RISC 6000 d a IBM, o processador PowerPC e, até certo grau, os processadores Pentium
da Intel. O RISC é um projeto menos complicado que utiliza diversas instruções simples
para executar em menos tempo uma operação comparável à de um único processador
CISC executando um grande e complicado comando. Os chips RISC podem ser
fisicamente menores que os chips CISC. E como possuem menos transistores, são
geralmente mais baratos de produzir e menos propensos a sobreaquecimento. Mas não
tem havido um movimento para grandes vendas de RISC devido a duas razões. A mais
importante é manter a compatibilidade com o vasto número de programas aplicativos que
tem sido escritos para funcionar com os processadores CISC anteriores da Intel. A
segunda razão é que não se obtém o benefício completo da arquitetura RISC a menos que
se esteja usando um sistema operacional e programas que tenham sido escritos e
compilados especificamente para conseguir o melhor das operações RISC. Alguns
fabricantes de computadores estão oferecendo processadores RISC como forma de
projetarem-se na tecnologia de ponta. Executam antigos programas CISC somente
através da emulação de processadores CISC, o que anula as vantagens do RISC.
Assim, a maioria dos fabricantes de PC têm permanecido com o projeto que é
onde os investimentos estão. Ao mesmo tempo, criad ores de software estão relutantes
em converter seus programas para versões compiladas para RISC já que não há tantas
pessoas que possuem PCs baseados em RISC. O mais provável é que os processadores
continuem pela via evolucionária mais segura que a Intel está trilhando. Eventualmente,
vamos acabar usando arquitetura RISC, mas a maioria dos usuários não saberá quando
seus computadores cruzarem a linha divisória entre os dois projetos. Os novos
processadores Pentium empregam uma arquitetura que mistura características das
arquiteturas CISC e RISC, sendo muito difícil dizer qual das arquiteturas será a do futuro.
A Tabela 3.5 mostra um comparativo entre as principais características das arquiteturas
RISC e CISC.
A grande evolução nos micros PC se deu na introdução do processador 80386
com ele os fabricantes de processadores, como a Intel tiveram base para seus projetos
futuros, tanto que atualmente a grande maioria dos processadores disponíveis no mercado
possuem o funcionamento compatível com o processador 386.
Três características, inovações técnicas, formaram a base para o projeto do
processador 386. A primeira delas é que há tantas instruções para ir do modo protegido
quanto para voltar ao modo real; a segunda delas é a criação do modo virtual 8086,
programas escritos no modo real pudem ser utilizados diretamente dentro do modo
protegido; e por sua vez a terceira característica que se baseia na manipulação de dados a
32 bits, o dobro da plataforma anterior. Além disso, estando no modo protegido, o 80386
consegue acessar até 4 GB de memória (RAM) muito mais que qualquer micro necessita.
Isto ocorreu em meados dos anos 80, mas somente por volta de 1990 tornaram-se comuns
nos PCs que utilizavam este microprocessador. Vamos descrever alguns recursos
importantes do modo protegido do 80386:
Memória Virtual: com essa maneira de gerenciar, podemos simular um computador
com mais memória RAM do que ele possui. Ou seja, é uma técnica que se baseia no ato
de conseguir um arquivo do disco rígido de tamanho qualquer para utilizar como uma
memória extra, chamado arquivo de troca (swap file).
Proteção de Memória: como o processador acessa muita a memória, podemos
carregar diversos programas simultaneamente. Através da proteção da memória,
o processador é capaz de isolar cada programa em uma área de memória bem
definida, de modo que um programa não invada a área de memória que esteja
sendo utilizada por outro programa.
Multitarefa: graças à proteção de memória, o processador é capaz de saber
exatamente onde se encontra cada programa carregado na memória. Dessa forma,
ele pode executar automaticamente uma instrução de cada programa, parecendo
que os programas estão sendo executados simultaneamente.
Modo Virtual 8086: o modo protegido é, a rigor, incompatível com o modo real.
Como poderíamos executar programas de modo real em modo protegido? Através
do modo virtual 8086, o processador pode trabalhar como se fosse vários processadores
8086 com 1 MB de memória (ou seja, um XT) simultaneamente. Isso significa que você
pode ter, ao mesmo tempo, um ou mais programas de modo real rodando dentro do
modo protegido simultaneamente, cada programa achando que está trabalhando em um
processador 8086 “puro” e completamente “limpo”.