Enviado por
common.user2481
Canard

Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Equilíbrio e estabilidade para
configurações canard
João Oliveira
Departamento de Engenharia Mecânica,
Área Científica de Mecânica Aplicada e Aeroespacial
Instituto Superior Técnico
Estabilidade de Voo, MEAero
(Versão de 27 de Outubro de 2011)
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
1 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Características
Exemplos
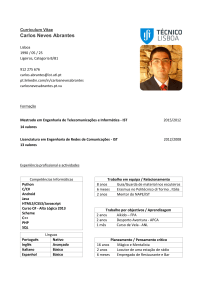
Primeiros exemplos
Flyer, irmãos Wright (Kitty Hawk, 1903)
João Oliveira (ACMAA, IST)
14-Bis, Santos Dumont (Paris, 1906)
Canard
Estabilidade de Voo
2 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Características
Exemplos
Utilidade do canard
O canard é utilizado para:
ñ
ñ
ñ
estabilidade da aeronave
controlo longitudinal (picada)
sustentação (secundário)
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
3 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Características
Exemplos
Tipos de canard
O canard pode ser:
ñ
ñ
ñ
fixo (não usado para controlo)
fixo, mas com elevators
totalmente móvel
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
4 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Características
Exemplos
Canard vs. cauda
Vantagens do canard
ñ
maior manobrabilidade
ñ
difícil entrar em perda
ñ
maiores valores de CLmax (sem flaps)
Desvantagens do canard
ñ
maiores variações do CM em voo (combustível)
ñ
diminuição de visibilidade
ñ
aerodinâmica mais complicada
ñ
dimensionamento do canard é crítico: é fácil fazer
mau projecto
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
5 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Características
Exemplos
Exemplos
Eurofighter
Canard móvel, usado para controlo de picada:
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
6 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Características
Exemplos
Exemplos
Velocity
Canard fixo, com elevator para controlo:
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
7 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Características
Exemplos
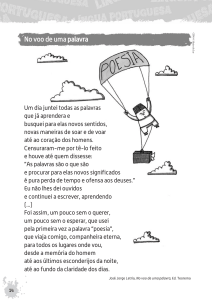
Exemplos
Velocity
Notar ailerons nas asas e controlo direccional nos winglets
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
8 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Características
Exemplos
Exemplos
Rutan Long-EZ
Canard fixo, com elevator para controlo:
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
9 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Características
Exemplos
Exemplos
Beechcraft Starship
Canard fixo, com elevator para controlo:
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
10 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Características
Exemplos
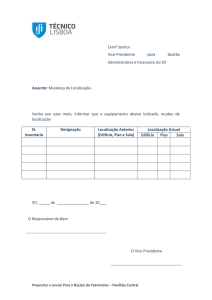
Exemplos
Piaggio 180 Avanti
Canard fixo, com flaps.
(Mas: três superfícies, e fuselagem produz sustentação.)
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
11 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Configuração a estudar
Sustentação e momento de picada
Ponto neutro
Configuração a estudar
O canard é:
ñ
ñ
a única superfície estabilizadora
a única superfície para controlo longitudinal
ñ
canard móvel, sem elevator
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
12 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Configuração a estudar
Sustentação e momento de picada
Ponto neutro
Notação
ñ
ic positivo se Lc > 0
ñ
ic é variável
ñ
hc̄: posição do CM, medida a partir do bordo de
ataque da asa
ñ
hc̄ pode ser negativo
ñ
hnwb c̄: posição do CA da asa
ñ
lc : distância entre CA do canard e CM
ñ
l̄c : distância entre CA do canard e CA da asa
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
13 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Configuração a estudar
Sustentação e momento de picada
Ponto neutro
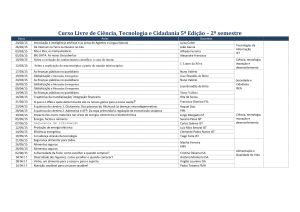
Upwash
Interacção aerodinâmica entre canard e asa é complexa:
ñ
canard está na zona de upwash da asa
ñ
asa está na zona de downwash do canard
ñ
vórtice marginal do canard tem efeito de upwash na
asa
Efeito global nos ângulos de ataque efectivos: αwb < αc .
Modelação do efeito: ângulo de upwash ε no canard.
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
14 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Configuração a estudar
Sustentação e momento de picada
Ponto neutro
Ângulos
αc = αwb + ε + ic
Ângulo de upwash: supomos dependência linear de αwb
ε = ε0 + εα αwb
αc = αwb (1 + εα ) + (ε0 + ic )
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
15 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Configuração a estudar
Sustentação e momento de picada
Ponto neutro
Medidas
Nota: h pode ser negativo (CM à frente da asa)
lc = l̄c + (h − hnwb )c̄ ⇒
lc Sc
l̄c Sc
Sc
=
+ (h − hnwb )
c̄S
c̄S
S
Vc = V̄c + (h − hnwb )
João Oliveira (ACMAA, IST)
Canard
Sc
S
Estabilidade de Voo
16 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Configuração a estudar
Sustentação e momento de picada
Ponto neutro
Adimensionalização para canard
V0 ≈ V
CLc =
Cmacc =
João Oliveira (ACMAA, IST)
Lc
1
2
2 ρV Sc
Macc
1
2
2 ρV Sc cc
Canard
Estabilidade de Voo
17 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Configuração a estudar
Sustentação e momento de picada
Ponto neutro
Sustentação total
Supomos ângulos de ataque pequenos.
L = Lwb + Lc
CL =
João Oliveira (ACMAA, IST)
L
1
2
2 ρV S
= CLwb +
Canard
Sc
CLc
S
Estabilidade de Voo
18 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Configuração a estudar
Sustentação e momento de picada
Ponto neutro
Sustentação total e ângulo de ataque
CL = CLwb +
Sc
CLc
S
CLwb = awb αwb
CLc = ac αc = ac αwb (1 + εα ) + ac (ε0 + ic )
Logo:
Sc
Sc
CL = awb + ac (1 + εα ) αwb + ac (ε0 + ic )
S
|
{zS
}
a
CL = a αwb + ac
João Oliveira (ACMAA, IST)
Canard
Sc
(ε0 + ic )
S
Estabilidade de Voo
19 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Configuração a estudar
Sustentação e momento de picada
Ponto neutro
Momento de picada
M = Macc + lc Lc + Macwb + (h − hnwb )c̄Lwb
Cm =
=
M
1
2
2 ρV S c̄
Sc cc
lc Sc
Cmacc +
CLc + Cmacwb + (h − hnwb )CLwb
S c̄
c̄S
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
20 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Configuração a estudar
Sustentação e momento de picada
Ponto neutro
Momento de picada
Cm =
lc Sc
Sc cc
Cmacc +
CLc + Cmacwb + (h − hnwb )CLwb
S c̄
c̄S
Cm =
Sc cc
Cmacc + Cmacwb +Vc CLc + (h − hnwb )CLwb
| S c̄
{z
}
Cmac
Dado que:
Vc = V̄c + (h − hnwb ) SSc ,
obtém-se:
Cm = Cmac + V̄c CLc + (h − hnwb )CL
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
21 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Configuração a estudar
Sustentação e momento de picada
Ponto neutro
Momento de picada e ângulo de ataque
Partimos de:
Cm = Cmac + V̄c CLc + (h − hnwb )CL
e usamos:
Sc
(ε0 + ic )
S
CLc = ac αc = ac αwb (1 + εα ) + ac (ε0 + ic )
Sc
Vc = V̄c + (h − hnwb )
S
CL = aαwb + ac
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
22 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Configuração a estudar
Sustentação e momento de picada
Ponto neutro
Momento de picada e ângulo de ataque
Obtém-se:
Cm = Cm0 + Cmα αwb
Sc
+ ac (ε0 + ic )
(h − hnwb ) + V̄c
S
+ ac (ε0 + ic )Vc
Cm0 = Cmac
= Cmac
Cmα = a(h − hnwb ) + V̄c ac (1 + εα )
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
23 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Configuração a estudar
Sustentação e momento de picada
Ponto neutro
Ponto neutro
Por definição, no ponto neutro
Cmα = 0
a(hn − hnwb ) + V̄c ac (1 + εα ) = 0
hn = hnwb − V̄c
João Oliveira (ACMAA, IST)
ac
(1 + εα ) = 0
a
Canard
Estabilidade de Voo
24 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Configuração a estudar
Sustentação e momento de picada
Ponto neutro
Margem estática
hn = hnwb − V̄c
ac
(1 − εα ) = 0
a
Cmα = a(h − hnwb ) + V̄c ac (1 + εα )
ac
= a h − hnwb + V̄c (1 + εα )
a
Logo:
Cmα = a(h − hn ) = −a Kn
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
25 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Canard móvel
Canard fixo e elevator
Canard fixo vs canard móvel
As expressões deduzidas são válidas tanto para canards
fixos como para canards com ângulo de incidência
variável.
ñ
canard fixo com elevator: necessário acrescentar
termo de controlo
ñ
canard móvel: controlo longitudinal realizado fazendo
variar ic
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
26 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Canard móvel
Canard fixo e elevator
Sustentação
CL = a αwb + ac
Sc
(ε0 + ic )
S
Supondo ε0 = 0, temos:
CL = CLα αwb + CLic ic
com:
João Oliveira (ACMAA, IST)
CLα ≡ a
Sc
∂CL
CLic ≡
= ac
∂ic
S
Canard
Estabilidade de Voo
27 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Canard móvel
Canard fixo e elevator
Momento de picada
Cm = Cm0 + Cmα αwb
Cm0 = Cmac + ac (ε0 + ic )Vc
Cmα = a(h − hnwb ) + V̄c ac (1 + εα )
Supondo ε0 = 0, temos:
Cm = Cmac + Cmα αwb + Cmic ic
(
Cmα = a(h − hn )
Cmic = ac Vc
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
28 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Canard móvel
Canard fixo e elevator
Ângulos de ataque e de incidência para equilíbrio
As equações de equilíbrio são as de sempre:
(
CL = CLtrim
Cm = 0
Logo:
(
CL = CLα αwb + CLic ic = CLtrim
Cm = Cmac + Cmα αwb + Cmic ic = 0
Daqui se deduzem os valores de α e ic de equilíbrio.
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
29 / 30
Configurações canard
Equilíbrio e estabilidade
Condições de equilíbrio
Canard móvel
Canard fixo e elevator
Canard fixo e elevator
Para casa:
Deduzir expressões para:
ñ
α (ângulo de ataque absoluto)
ñ
Cm0
ñ
CLδe
ñ
Cmδe
no caso de canard fixo com elevator.
Supor relação linear: CLc = ac αc + ae δe
João Oliveira (ACMAA, IST)
Canard
Estabilidade de Voo
30 / 30