6. A lei da Atracção Universal
Até agora aceitámos, sem grande discussão, que todos os corpos na vizinhança da
Terra são actuados por uma força vertical a que designámos por peso. A sua
expressão vale, num referencial em que o eixo Y coincide com a vertical de lugar
(figura 2),
=−
onde é o valor da aceleração da gravidade. Nestes parágrafos vamos debruçarmonos em detalhe sobre a natureza e as causas desta força, que iremos ver,
representa uma das 4 interacções fundamentais até agora identificadas na
Natureza, a gravitação (as outras 3 são a interacção forte, a interacção fraca e a
interacção electromagnética).
O desvendar da natureza do peso deve-se a um dos maiores génios de sempre da
Física, Isaac Newton (1643-1727). Diz a história popular que Newton terá tido a
inspiração para a lei da Atracção Universal que viria a deduzir, ao observar a queda
de uma maçã. Mesmo que não seja correcta esta lenda, ela permite-nos mostrar
como Newton foi ousado para a sua época ao comparar o comportamento de um
objecto terrestre, a maçã, com o comportamento dos corpos celestes, neste caso a
Lua, que se julgava pertencerem a um mundo à parte, um mundo divino.
O movimento dos astros era já bem compreendido ao tempo de Newton, sendo
aceite a teoria heliocêntrica de Copérnico. Os planetas, rodando em torno do Sol, ou
as luas rodando em torno de um
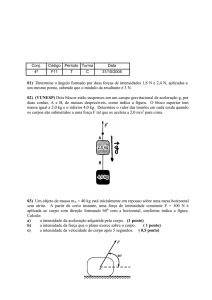
planeta, obedeciam às leis de Kepler:
1ª lei – A trajectória dos planetas
é uma elipse, com o Sol ocupando um
dos focos. Esta lei encontra-se ilustrada
na figura 20a onde se representam as
trajectórias de diferentes corpos em
torno do Sol. Apenas no caso de
Mercúrio, do asteróide e do cometa é
possível notar a olho nu a diferença
entre uma circunferência e uma elipse. A
equação de uma elipse é dada
matematicamente pela expressão
+
=
onde e são os semi-eixos da elipse.
O afastamento da elipse de uma forma
circular é avaliado pela excentricidade, o
parâmetro da figura 20a. Quanto maior
for este parâmetro, mais alongada será
a elipse. Uma circunferência tem
excentricidade nula.
2ª lei – Nessas trajectórias, os planetas descrevem áreas iguais em tempos
iguais (ver figura 20b). Isto significa que um astro será mais rápido quando estiver
próximo do Sol e mais lento quando estiver mais afastado.
Cap.3-18
3ª lei – Os períodos de rotação dos
planetas e a sua distância média ao Sol
estão relacionados, de forma que o
quadrado do período é proporcional ao cubo
da distância. Esta lei pode-se traduzir pela
expressão
=
onde
é a constante de Kepler. Esta lei
encontra-se exemplificada na figura 20c
onde se apresentam a relação entre o
período e o raio da trajectória para os
planetas do sistema solar.
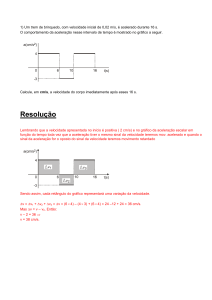
O génio de Newton terá sido o de deduzir
que se uma maçã cai em direcção ao centro
da Terra como uma certa aceleração que
resultará da atracção que a Terra exerce
sobre a maçã, também a Lua deveria estar a
cair continuamente para o centro da Terra,
com uma aceleração que traduz a atracção
da Terra. Esta queda está ilustrada na figura 21. Se não houvesse queda, se não
houvesse atracção da Terra, a Lua deveria ter um movimento rectilíneo uniforme.
Como ela tem de facto um movimento circular uniforme, a aceleração desse
movimento deve resultar da mesma força que faz cair a maçã.
Recordemos que no movimento circular uniforme, com velocidade angular ω
constante, se tem
=ω =
π
então a aceleração normal deste movimento toma a expressão
=
=ω
=
Cap.3-19
π
Se a força que se exerce sobre
uma maçã é o produto da sua
massa pela aceleração, também a
força que a Terra exerce sobre a
Lua deverá ser o produto da
massa
da
Lua
pela
sua
aceleração
=
π
=
Usando agora a 3ª lei de Kepler,
poderemos escrever para a força
que a Terra exerce sobre a Lua a
expressão
=
(
π
)
Isto é, a força que a Terra exerce
sobre a Lua é proporcional à
massa da Lua e inversamente proporcional à distância entre os dois corpos.
Pela 3ª lei de Newton, a toda acção de um corpo (Terra) sobre outro corpo (Lua)
deve corresponder uma reacção do 2º corpo (Lua) sobre o 1º (Terra). Admitindo a
universalidade da lei da atracção, essa reacção deve ser proporcional à massa da
Terra. Por isso, a força de Atracção Universal entre quaisquer dois corpos deve ser
proporcional ao produto das suas massas, e a Lei da Atracção Universal traduz-se
pela expressão
=
“Quaisquer dois corpos com massa, atraem-se mutuamente com uma força que em
módulo é proporcional ao produto das suas massas e inversamente proporcional ao
quadrado da distância entre elas”.
A constante que aparece nesta expressão é a constante de atracção universal
e vale no Sistema Internacional de unidades
.
×
A massa que intervém na lei da atracção universal mede o poder de atracção dos
corpos, que se pensa ser proporcional à sua quantidade de matéria. Este conceito
de massa é diferente daquele que intervém na 2ª lei de Newton, onde a massa
mede a inércia dos corpos. Até hoje ainda não se encontrou um desvio da
proporcionalidade entre ambos os conceitos de massa e por isso eles são usados
de forma indiferente.
Para representarmos a Força de atracção gravitacional na sua forma vectorial,
deveremos considerar, por simplicidade, que é a massa
que exerce a atracção
sobre a massa , como se mostra na figura 22. O sistema de eixos adequado a
descrever esta situação é um sistema centrado na massa atraente e com o vector
unitário (versor), , de direcção radial a apontando para fora, como se mostra na
figura.
Cap.3-20
Neste sistema de eixos a força de
atracção universal exprime-se como
=−
Trata-se de uma força central, actua
segundo a recta que une os centros
dos corpos, radial, tem a direcção do
raio e é atractiva (é esse o significado
do sinal – na fórmula).
A massa da Terra
Relativamente ao peso dos corpos, a aproximação mais simples consiste em dizer
que é o resultado apenas da atracção gravitacional devida à presença da massa da
Terra. Como iremos ver mais tarde, este conceito precisa de uma correcção, mas
ele vai-nos permitir obter, para já, uma primeira estimativa para a massa do planeta
Terra.
De facto, se o peso resulta exclusivamente da atracção gravitacional da Terra, então
podemos escrever para o peso de um corpo qualquer de massa
=
=
Eliminando a massa desta equação, obtemos para a massa da Terra a expressão
=
Usando o valor de
gravidade, obtemos
=
para o raio da Terra e de !" #
$ para a aceleração da
×
.
Com o mesmo valor do raio da Terra podemos calcular o seu volume
% = π =
×
e também a densidade média da Terra
ρ =
%
=
=
Este valor tem consequências muito importantes relativamente à estrutura do interior
do planeta Terra. De facto, sabemos que as rochas da crosta têm uma densidade
média de
#& ' enquanto que o manto superior tem uma densidade média de
'
. Qualquer destes valores é inferior à densidade média da Terra. Isto
' ' #&
significa que no seu interior deve existir uma camada cuja densidade é superior à
densidade média. Esta camada, muito densa, sabemos por métodos sísmicos que é
o núcleo terrestre, constituído essencialmente por Ferro e Níquel que se terão
separado nos estádios iniciais de formação do planeta.
Cap.3-21
O movimento dos satélites
Vamos considerar o caso de satélites com uma pequena massa que gravitando
em torno de um astro de massa maior,
, descrevem trajectórias circulares com
movimento uniforme, têm movimento circular uniforme de raio . Uma vez que no
movimento circular uniforme a aceleração normal está relacionada com o período de
rotação , podemos então obter a expressão analítica para a constante de Kepler
apresentada anteriormente
=
π
→
=
=
π
→
ou
=
=
&(
=
π
π
No caso de satélites que orbitam em torno do planeta Terra, a constante de Kepler
vale aproximadamente (usando para o raio e massa da Terra os valores anteriores)
=
× − $ −
A 3ª lei de Kepler permite calcular o raio da trajectória de um satélite, conhecido o
seu período, ou conhecer o período, sabendo o raio da trajectória
=
=
Por exemplo, o satélite Português, Po-Sat
http://unidyne.uni.pt/~fcr/posat/posat1ph.html
tem uma trajectória quase circular a !
de altura, isto é, usando
para o
raio da Terra, teremos que o raio da trajectória vale 7190 km. Usando a fórmula
anterior, temos um período de rotação de
)$, ou seja, de
"*( .
A constelação de satélites IRIDIUM(http://www.iridium.com/) que fornece acesso
global a comunicações móveis, funciona com base em 66 satélites que se deslocam
a uma altitude muito próxima do Po-Sat, 780 km.
Os satélites GPS que permitem o posicionamento à superfície do Globo com grande
precisão, descrevem uma órbita completa aproximadamente cada 12 horas.
Aplicando a fórmula anterior, a altitude do satélite (após retirarmos 6400 km do raio
terrestre) vale 20275 km. (ver http://www.colorado.edu/geography/gcraft/note).
Já as comunicações por satélite e os satélites de TV se baseiam em satélites
geoestacionários, isto é, satélites que se localizam sobre o Equador terrestre e que
têm um período de rotação idêntico ao período de rotação da Terra. Desta forma
eles parecem estar sempre sobre o mesmo local da Terra e daí o seu nome. Para
conhecer a altura a que estão estes satélites, basta usar o valor de 24 horas para o
período, aproximado, de rotação da Terra e substituir na equação da 3ª lei de
Kepler. Obtemos para o raio da trajectória o valor de
. Usando
'
novamente
para o raio da Terra, concluímos que estes satélites circulam a
de altitude. Sabendo que a distância média da Terra à Lua é de '"
')!
, podemos apreciar que um satélite geoestacionário está situado a 11% dessa
distância, o que é um valor muito apreciável.
Cap.3-22
7. Referenciais não inerciais, forças de Inércia
Já vimos antes, quando foi discutida a 1ª lei de Newton, que na ausência de forças
um corpo não tem aceleração. Os referenciais onde esta lei se designam-se por
referenciais não inerciais. Se imaginarmos um elevador a deslocar-se suavemente
com velocidade constante (e por isso aceleração nula), não é possível saber a partir
do interior se o elevador está parado ou em movimento. Esta experiência traduz um
exemplo do Postulado da Invariância de Galileu, isto é, não é possível fazer
experiências físicas que mostrem a diferença entre um referencial parado e outro
em movimento rectilíneo uniforme. Os referenciais são equivalentes do ponto de
vista físico e por isso não há movimentos absolutos.
No entanto, a situação no elevador altera-se completamente quando o elevador
acelera ou trava, isto é, quando tiver uma aceleração diferente de zero. Nestas
circunstâncias o observador dentro do elevador fechado sente, sem razão aparente,
um aumento ou diminuição da sensação de peso, concluindo por isso que o seu
referencial deixou de ser inercial. Vejamos como descreveria cada uma das duas
situações possíveis um observador fora do elevador.
Elevador com aceleração descendente (sentido para baixo)
Esta situação ocorre quando o elevador inicia a sua descida
ou quando ele trava durante a subida. A aceleração e as
forças envolvidas encontram-se representadas na figura
23a. Usando apenas o eixo normal, podemos escrever pela
2ª lei de Newton
+ =
−
+ =−
→
=
−
Esta situação traduz-se por uma diminuição da reacção
normal, isto é, por uma diminuição da sensação de peso.
Elevador com aceleração ascendente (sentido para cima)
Esta situação ocorre quando o elevador inicia a sua subida
ou quando ele trava durante a descida. A aceleração e as
forças envolvidas encontram-se representadas na figura
23b. Usando apenas o eixo normal, podemos escrever pela
2ª lei de Newton
+ =
−
+ =
→
=
+
Esta situação traduz-se por um aumento da reacção
normal, isto é, por um aumento da sensação de peso.
Como vimos, o observador que está dentro do elevador, não é um observador
inercial. Para ele não há aceleração nenhuma, tudo se passa como se houvesse
uma força extra a actuar. De facto, se um observador não inercial desejar continuar
a usar a 2ª lei de Newton, por exemplo para estudar um problema de equilíbrio,
Cap.3-23
então ele necessita de acrescentar à sua colecção de forças físicas, uma força
adicional que se deve apenas ao movimento acelerado do seu referencial. Essa
força extra designa-se por força de inércia. Para a representar vamos usar como
símbolo um “F” maiúsculo desenhado, .
Se estivermos numa situação num referencial inercial, com várias forças presentes e
uma aceleração
+ + =
então, é fácil perceber que, para descrever o que se passa no interior do referencial
sujeito a aceleração onde aparentemente, a aceleração é nula, basta considerar que
a força extra que faz o equilíbrio toma a expressão
+ + −
=
+ + − =
de onde se retira a expressão para a força de inércia
=−
Isto é, a força de inércia que o observador não inercial tem de considerar é o
simétrico do produto da massa pela aceleração desse referencial.
Vejamos como é que o observador não-inercial descreve agora o que se passa num
elevador em aceleração.
Elevador com aceleração descendente
A aceleração e as forças envolvidas encontram-se
representadas na figura 23a, onde se leva agora em conta
a força de inércia. A 2ª lei de Newton para um observador
no interior do elevador escreve-se com uma aceleração
nula
+ + =
−
+ +
=
→
=
−
Chegamos à mesma conclusão que anteriormente, temos
uma diminuição da reacção normal, isto é, uma diminuição
da sensação de peso.
Elevador com aceleração ascendente
A aceleração e as forças envolvidas encontram-se
representadas na figura 24b, onde se leva agora em conta
a força de inércia. A 2ª lei de Newton para um observador
no interior do elevador escreve-se com uma aceleração
nula
+ + =
−
+ −
=
→
=
−
Chegamos à mesma conclusão que anteriormente, temos
um aumento da reacção normal, isto é, um aumento da
sensação de peso.
Cap.3-24
As forças de inércia podem ser consideradas quando os referenciais não inerciais
têm movimento de translação, como se viu no exemplo dos elevadores, mas
também quando os referenciais têm um
movimento de rotação. Um caso particular
ocorre em referenciais com movimento circular
uniforme. Neste caso, a única aceleração do
referencial é a aceleração normal, radial e
centrípeta, como se mostra na figura. A força
de inércia correspondente terá o sentido
contrário da aceleração. Esta força de inércia
que existe nos referenciais em rotação tem um
nome especial, chama-se força centrífuga. Ela
é a “culpada” dos corpos serem projectados
para fora quando uma viatura descreve uma
trajectória apertada. Não esquecer que esta é
a desculpa dada pelo observador não-inercial. A interpretação inercial dessa
situação continua a ser dada pela 1ª lei de Newton, os corpos têm tendência a
prosseguir no seu movimento rectilíneo uniforme, ao contrário do carro que é
obrigado a descrever a curva.
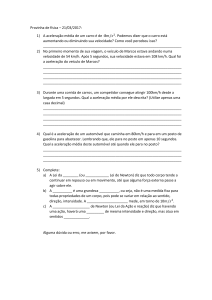
Exemplo 9 O equilíbrio de um pêndulo dentro de uma viatura em aceleração
Consideremos a situação apresentada na figura 26a. Um observador numa
carruagem fechada observa um pêndulo pendurado no tecto. Ao mesmo tempo que
o observador é “empurrado” contra a parede da carruagem, ele observa que o
pêndulo se afasta da vertical, “sem razão aparente”. Ambas as observações se
explicam pelo facto da carruagem não ser um referencial inercial uma vez que ela
está sujeita a uma aceleração constante horizontal. Neste caso, as observações
justificam-se com uma aceleração apontando para a frente da carruagem. Para
explicar o equilíbrio do pêndulo no seu referencial (não inercial) o observador é
.
obrigado a incluir, para além das forças físicas, uma força de inércia, = −
Nesse referencial, a 2ª lei de Newton para o equilíbrio escreve-se como
=
→
+ + =
+ +
+
Cap.3-25
Usando a decomposição da Tensão no sistema de eixos indicado na figura 26b,
podemos escrever
$ α
$ α−
=
=
→
=
α
α
α=
−
+
α
=
Podemos concluir que o pêndulo funciona como um acelerómetro, pois o seu ângulo
com a vertical está relacionado com a aceleração do referencial. A tabela seguinte
mostra quais são os valores da aceleração (em função da aceleração da gravidade)
para diferentes valores desse ângulo.
ângulo
aceleração
5º
0.09g
10º
0.18g
20º
0.36g
30º
0.58g
40º
0.84g
50º
1.19g
60º
1.73g
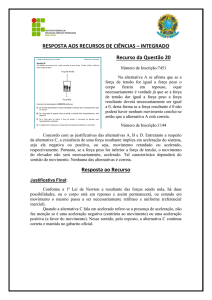
Exemplo 10 Simulação de forças sobre um modelo reduzido à escala 1/10
Para estudar o comportamento dinâmico de solos e construções, quando estão
sujeitos à vibração provocada por um sismo, é frequente o uso de modelos
reduzidos. Nestas circunstâncias, se um modelo é reduzido à escala de 1/10 então,
para manter as condições de simulação, é necessário que ele seja actuado por uma
força vertical, equivalente ao peso, 10 vezes superior ao peso normal. Para se obter
este efeito é possível usarmos o princípio da centrifugadora, como se mostra na
figura 27a. O mesmo princípio é usado na simulação de acelerações superiores às
da gravidade para o treino de astronautas e pilotos de aviação. Quando a
centrifugadora está em rotação com movimento circular uniforme, os objectos dentro
da caixa estão sujeitos a uma aceleração constante que é a aceleração normal
=
=ω
Um observador dentro da caixa, sente um aumento da sua sensação de peso e que
a caixa roda até atingir o equilíbrio com um certo ângulo em relação à vertical, como
se mostra na figura 27a. Para este observador (não-inercial) a sua situação de
equilíbrio é justificada pela acção de duas forças físicas, o peso e a reacção normal,
e uma força fictícia, a força centrífuga (uma força de inércia)
Cap.3-26
&
= ω
Para o observador não inercial a 2ª lei de Newton escreve-se na forma vectorial
como
+ + &=
Fazendo a decomposição da reacção normal no sistema de eixos indicado na figura
27b, podemos escrever o sistema de equações escalares
− $ α+ ω =
−
+
α=
A sua resolução permite obter a reacção normal e a velocidade angular em função
do ângulo de inclinação da caixa,
=
α
ω=
α
No exemplo apresentado, pretende-se que o peso aparente seja de 10 vezes o peso
=
. Nestas condições, a inclinação da caixa deverá ser de
real, ou seja, que
84.3º. Para uma centrifugadora com um diâmetro de 10 m, a velocidade angular
ω=
, $
valerá
e
a
frequência
correspondente
é
de
/ = π
ω=
. =
-
(r.p.m representa rotações por minuto).
8. O Peso e as forças de Inércia à superfície da Terra
Devido ao movimento de rotação da Terra, os referenciais ligados à superfície da
Terra não são referenciais inerciais. Isto significa que deveria ser possível pôr em
evidência esse facto através da acção de forças de inércia fictícias. Apesar da
elevada velocidade a que se desloca a superfície da Terra no seu movimento de
rotação (ver capítulo 2), os efeitos dinâmicos dessa rotação são muito subtis. A
primeira experiência que pôs em evidência a rotação da Terra foi o famoso pêndulo
de Foucault.
Em 1850, para a Exposição de Paris, Leon Foucault construi um pêndulo de 67 m
de altura que baloiçava uma bala de canhão de 28 kg de massa. Para marcar o
plano de oscilação do pêndulo, Foucault usou uma pequena elevação de areia. O
Pêndulo oscilava muito lentamente, uma oscilação por cada 16 s, e em cada
passagem a bala derrubava um pedacinho de areia. Rapidamente se observou que
a areia nunca era derrubada exactamente no mesmo sítio, mas sempre ligeiramente
ao lado. Estava demonstrado que a Terra rodava, a sua superfície não é um
referencial inercial.
A consequência mais importante da rotação da Terra tem a ver com a definição do
peso. De facto, como podemos ver da figura 26, a rotação da Terra com uma
velocidade angular ω impõe a cada ponto da sua superfície uma aceleração normal
centrípeta, dada por
=ω =ω
λ
Cap.3-27
Então, nos referenciais situados à superfície da Terra, é necessário acrescentar
uma força de inércia para descrever o equilíbrio dos corpos, é a força centrífuga
ω
λ
& =
Como se mostra na figura 28, e em detalhe na figura 29, a força centrífuga altera o
módulo e a direcção do peso. O peso deve assim ser considerado como a soma de
duas forças num referencial não-inercial, a atracção gravitacional e a força
centrífuga
=
=
+ &
Por consequência, a força do peso não aponta
exactamente para o centro da Terra (a não ser nos
pólos e no equador). Uma outra consequência é
que a forma da Terra não pode ser esférica. Ela é
aproximadamente um elipsóide de revolução
achatado nos pólos.
A outra consequência da presença da força
centrífuga é que o valor da aceleração da
gravidade varia com a latitude, uma vez que esta
força também varia com a latitude, é máxima no equador e nula nos pólos
=
=
+
&
→
+ω
=−
λ
&
Para determinar o valor de , o módulo da aceleração da gravidade, começamos por
usar a expressão que calcula o módulo da soma de dois vectores que fazem um
ângulo α entre si
+
=
+
+
λ
α=
α
Aplicando ao nosso caso,
=
=ω
=
obtemos
=
(
+ω
λ) −
ω
Cap.3-28
−λ
λ≈
α =−
→
−
ω
λ
λ
Nesta expressão a aproximação resulta do facto de se ter
>>
+
≈
α
+
Podemos assim escrever para o valor da aceleração da gravidade a expressão
≈
−
ω
λ
Esta expressão pode ainda ser simplificada, uma vez que debaixo do sinal de raiz
está a diferença entre 1 e um número muito pequeno, que podemos identificar como
ε. Da aproximação
ε <<
−ε ≈ −
ε
Resulta finalmente para a aceleração da gravidade a aproximação (chamada de
aproximação de ordem zero) para a aceleração da gravidade
=
−
λ
=
&(
=
ω
Esta expressão tem apenas em consideração a força centrífuga que depende da
latitude.
Se for tomada em consideração a forma aproximada da Terra como um elipsóide de
revolução, achatado nos pólos, teremos a aproximação de 1ª ordem para a
aceleração da gravidade. A aproximação de 2ª ordem entra-se já em consideração
com uma correcção da forma do elipsóide. Um exemplo desta aproximação é a
fórmula da Gravidade de 1967 aprovada pela Associação Internacional de
Geodesia,
=
+
$ λ−
$
λ
$
Esta fórmula dá para cada lugar a aceleração da gravidade normal ao nível do mar,
que como se vê, apenas depende da latitude do lugar.
9. O Princípio da Gravimetria
Vimos no parágrafo anterior que a fórmula da Gravidade de 1967 permite obter o
valor normal da gravidade em qualquer lugar da Terra ao nível do mar. Para pontos
que não estejam ao nível do mar, é necessário considerar a variação da gravidade
com a altitude. Uma vez que esta variação é muito pequena, podemos usar uma
fórmula aproximada que resulta do desenvolvimento em Taylor de uma dada
função,
* <<
/ * ≈ /
+/
*
(
∆/ = / * − /
≈ /
*
/0 1é o valor da aceleração da gravidade ao nível do mar
/0*) é o valor da aceleração da gravidade à altura *
Se usarmos para /0 1apenas a contribuição devida à atracção gravitacional, teremos
=
→
∆ ≈
*=−
Cap.3-29
*=−
×
−
×*
$
Esta correcção designa-se por correcção de ar-livre, pois se admite que o ponto de
medida se encontra no meio do ar a h metros de altitude. Estas correcções, assim
como as anomalias na aceleração da gravidade, são valores muito pequenos e por
isso em Gravimetria (o ramo da Geofísica que estuda o campo gravítico terrestre e a
sua variação) usa-se uma outra unidade que é o
2 e o seu submúltiplo, o
2
−
−
−
2= & $ =
$
2=
2=
$
Nestas unidades, a correcção de ar-livre vale
∆ 3 =−
2×*
&( *
Para se ter um valor de referência mais realista para os pontos que não estão à
altitude zero é necessário levar em consideração, para além da elevação que reduz
a aceleração da gravidade, a atracção adicional que é devida à rocha que preenche
o espaço entre o nível zero e a altitude do ponto. Esta correcção é positiva e é
'
designada por correcção de Bouguer. Para uma densidade da rocha de
#
&
esta correcção vale, para uma altura * em metros
∆ 4=
2×*
Os dois efeitos conjugados, ar-livre e Bouger, produzem uma variação da
aceleração da gravidade com a altitude dada por
∆ =−
2×*
Para além da aceleração da gravidade variar com a latitude e com a altitude, ela
também varia com o tempo por acção das marés, provocadas pela atracção
gravitacional luni-solar. Este efeito é quase periódico e tem uma amplitude da ordem
de
2.
Se o planeta Terra fosse homogéneo, formado por camadas paralelas de espessura
constante, a aceleração da gravidade em qualquer ponto poderia ser descrita pela
fórmula Internacional em conjunto com as correcções de ar-livre e Bouguer. No
entanto, o interior da Terra não é homogéneo e esse efeito deve ser notado à
superfície pela variação da aceleração da gravidade de local para local. A
determinação da estrutura interna da Terra a partir do estudo da variação da
gravidade é um dos objectivos da Gravimetria.
Para compreender os fundamentos da prospecção gravimétrica, devemos começar
por considerar a situação representada na figura 30a. Se medirmos a aceleração da
gravidade sobre um meio homogéneo de densidade ρm obtemos um valor constante,
Cap.3-30
não há nenhuma anomalia. Se tivermos agora a situação da figura 30b, com um
corpo de densidade ρc , então poderemos ter 3 casos possíveis:
a atracção gravitacional de ambos os materiais é idêntica,
i) ρ & = ρ
independentemente da sua natureza, por consequência não há nenhuma anomalia.
ii) ρ & > ρ a atracção do corpo é superior à do meio envolvente e por isso a
aceleração da gravidade deve ser superior à normal na vizinhança do corpo, sendo
máxima exactamente sobre o centro do corpo.
iii) ρ & < ρ a atracção do corpo é inferior à do meio envolvente e por isso a
aceleração da gravidade deve ser inferior à normal na vizinhança do corpo, sendo
mínima exactamente sobre o centro do corpo.
Podemos então concluir que para existirem anomalias de gravidade é necessário
haver um contraste (diferença) entre as densidades do corpo e do meio envolvente.
A anomalia de gravidade resulta da atracção gravitacional da massa que resulta
dessa diferença de densidades. Chamamos de massa anómala,
, à massa
causadora da anomalia de gravidade
= (ρ & − ρ )%
A anomalia de gravidade é então a atracção gravitacional desta massa e pode ser
descrita por
∆ =
onde representa a distância entre o ponto e o centro da massa anómala.
Exemplo 11 Prospecção gravimétrica nas
Grandes Pirâmides
As Grandes Pirâmides são túmulos dos
antigos faraós do Egipto onde eram
guardados grandes tesouros, muitas
vezes em salas secretas. Este exemplo
relata uma situação real em que os
arqueólogos procuravam uma câmara
secreta que estaria escondida por baixo
de uma sala. Sendo um monumento
nacional, não era possível realizar
qualquer perfuração na rocha do chão da
sala e por isso os arqueólogos tiveram de se socorrer de um método indirecto. Uma
vez que uma sala representa um espaço vazio rodeado de rocha, seria de esperar
que a sua presença fosse revelada por uma anomalia da aceleração da gravidade.
Neste exemplo vamos calcular qual seria a anomalia esperada pela presença de
uma sala cúbica com 2 m de lado, a uma profundidade de 2 m, rodeada de calcário
3
de densidade 2.5 g/cm . A situação encontra-se ilustrada na figura 31.
'
O volume do corpo vale " e a massa anómala é negativa, valendo
)× = − ×
=( −
Sendo a distância entre a superfície e o centro do corpo
vertical do corpo, a anomalia de gravidade máxima vale
×
∆ =
=−
× −
=
× −
$ =
Cap.3-31
, exactamente na
2
Trata-se de um valor muito pequeno mas que pode ser medido.
Para terminar esta pequena história, podemos dizer que os investigadores
detectaram de facto uma anomalia e para a testar fizeram um furo por onde
passaram uma pequena câmara de filmar. O resultado foi que encontraram uma
cavidade, mas cheia de areia e eventualmente maior do que a esperavam. Este
resultado é normal pois em Gravimetria o que interessa no cálculo da anomalia de
gravidade é o valor da massa anómala total. Esta massa pode ser obtida por um
volume mais pequeno e uma diferença maior de densidades, ou por um menos
contraste de densidades distribuído por um maior volume. Em Gravimetria não há
uma solução única para o corpo responsável pelas anomalias.
Cap.3-32