1. Introdução
Com o intuito de se estudar diferentes aplicações dos sistemas de
controle de rotação de máquinas elétricas e a eletrônica envolvida nesses
processos, foi desenvolvido um projeto no qual se montou um circuito em uma
protoboard que compreendia uma Ponte H e um controle PWM. O projeto
envolveu desde a esquematização dos circuitos, passando pela seleção
apropriada dos componentes e programação do sistema de controle, até a
realização de testes que pudessem comprovar o seu correto funcionamento.
Além de agregar conhecimentos práticos ao que foi desenvolvido em
sala de aula, o seguinte projeto visa prover aos integrantes do grupo, de forma
didática, maior contato com uma importante aplicação da engenharia.
2. Descrição dos Circuitos
2.1 Descrição do Circuito PWM
Os controles de potência, inversores de freqüência, conversores para
servomotor, fontes chaveadas e muitos outros circuitos utilizam a tecnologia do
PWM (Pulse Width Modulation) ou Modulação de Largura de Pulso como base
de seu funcionamento.
Na eletrônica moderna, o rendimento com pequenas perdas e a
ausência de grandes dissipadores que ocupem espaço é fundamental,
principalmente quando circuitos de alta potência estão sendo controlados.
Desta forma, controles de potência lineares não são convenientes, sendo
necessárias outras configurações de maior rendimento como as que fazem uso
do PWM. Ao controlar circuitos analógicos digitalmente, custos e consumo de
energia podem ser drasticamente reduzidos.
Resumidamente, PWM é uma forma de codificar digitalmente os níveis
de sinal analógico. Através do uso de contadores de alta resolução, o ciclo de
trabalho (duty cicle) de uma onda quadrada é modulada para codificar um nível
de sinal analógico específico. O sinal do PWM ainda é digital, pois em qualquer
instante de tempo, a fonte DC ou está totalmente ligada ou totalmente
desligada.
A fonte de tensão ou corrente alimenta a carga analógica por meio da
repetição de uma série de pulsos, nos quais a fonte se encontra ora ligada ora
desligada. O período em que a fonte DC permanece ligada é chamado de ontime e o período em que a fonte permanece desligada é chamado de off-time.
Dada uma largura de banda suficiente, qualquer valor analógico pode ser
codificado com o PWM.
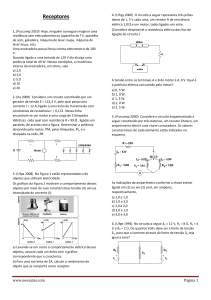
A figura 1 ilustra três diferentes sinais de PWM. A 1ª figura mostra a
saída do PWM com 10% de duty cicle. Isto é, o sinal está em nível alto (ligado)
em 10% do período e o restante em nível baixo (desligado). As figuras 1b e 1c
mostram as saídas do PWM com 50% e 90% de duty cicle, respectivamente.
Essas três saídas do PWM codificam três diferentes valores de sinais
analógicos, com 10%, 50% e 90% do valor máximo. Se, por exemplo, a fonte
for de 9V com duty cicle de 10%, o sinal resultante será de 0.9V.
Figura 1: Sinais de PWM resultantes da variação do duty cicle
Para implementação de controles PWM existem muitos circuitos
integrados especiais, alguns deles incluindo as etapas de potência e até
mesmo circuitos de pontes H para reversão de sentido.
2.2 Descrição do Circuito Ponte H
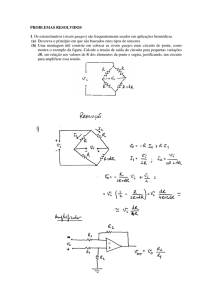
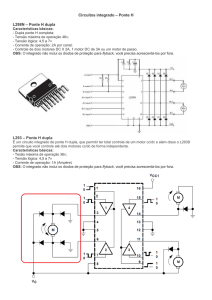
O circuito em Ponte H é um dos mais importantes e utilizados circuitos
quando se necessita fazer o controle de velocidade em motores de corrente
contínua (motores DC). A função do circuito em Ponte H é controlar o sentido
de rotação de um motor DC segundo um sinal de um microcontrolador, por
exemplo. Isso pode ser feito utilizando-se quatro chaves simples, como chaves
mecânicas, transistores ou relés, dispostas em forma da letra “H”, localizadas
em cada um dos extremos do circuito com o motor posicionado em seu centro.
Além de conectadas ao motor, duas das chaves estão ligadas em 5V, na parte
superior do circuito, e outras duas em ground, na parte inferior do circuito.
Figura 2 – Ponte H Simplificada
Seguindo a estrutura descrita, para correto funcionamento de um motor DC
associado a uma ponte H é necessário que o chaveamento se dê em pontos
diametralmente opostos, sendo que uma das chaves permite a passagem de
corrente e outra se conecta ao ground, enquanto as duas chaves restantes
permanecem abertas. Para que um motor DC inverta seu sentido de rotação é
necessário alterar a ligação de seus terminais, invertendo-se seus pólos,
negativo e positivo. Utilizando o circuito em Ponte H essa operação equivale a
mudar as chaves diagonais que fecham o circuito e que permitem a passagem
de corrente em sentido oposto à configuração anterior e consequentemente a
rotação do motor irá inverter seu sentido. Caso todas as chaves sejam
fechadas, o motor, se em movimento, pára suavemente. Caso duas chaves,
superiores ou inferiores, sejam fechadas, o circuito funcionará como freio para
o motor. Deve-se cuidar, no entanto, para que duas chaves verticalmente
opostas não sejam fechadas simultaneamente, pois tal fato produzirá um fluxo
de corrente que causará um curto circuito na fonte de alimentação.
Dentre as chaves disponíveis para o desenvolvimento da Ponte H foi escolhido
o transistor, devido a sua funcionalidade e fácil aplicação. Quando a base do
transistor é devidamente polarizada ele é capaz de produzir corrente entre seus
terminais Coletor e Emissor. Para transistor do tipo NPN essa corrente se dá
no sentido do Coletor para o Emissor, enquanto que nos transistores PNP a
corrente será conduzida do Emissor para o Coletor. Os transistores NPN
conduzem corrente em sua base quando em nível alto e os transistores PNP o
mesmo ocorre em nível baixo.
Além dos transistores é necessário adicionar à Ponte H resistores que limitem
a corrente que passa pelos transistores e que chega ao motor, levando-se em
consideração o ganho do transistor.
Para realizar o controle do funcionamento da Ponte H faz-se uso de um
microcontrolador (PIC) que envia para o circuito dois sinais de controle. A
disposição dos transistores NPN e PNP é tal que em uma linha vertical existe
um transistor de cada tipo. Um mesmo sinal de controle é utilizado para
sensibilizar um par de transistores NPN e PNP. Nessa configuração, quando o
sinal é de nível alto, apenas o transistor NPN conduzirá corrente e, quando em
nível baixo, apenas o transistor PNP conduzirá corrente. Assim, a seguinte
lógica pode ser seguida:
Tabela 1: Lógia de Funcionamento da Ponte H
Controle S1
0
0
1
1
Controle S2
0
1
0
1
NPN1
Cortado
Cortado
Conduz
Conduz
PNP1
Conduz
Conduz
Cortado
Cortado
NPN2
Cortado
Conduz
Cortado
Conduz
PNP2
Conduz
Cortado
Conduz
Cortado
Motor
Parado
Horário
Anti horário
Parado
Nessa configuração não existe a possibilidade de ocorrer um curto circuito, pois
em uma mesma linha vertical (entre ground e 5V) não existem dois transistores
cortados ou conduzindo.
2.3 Dimensionamento de componentes
Para o dimensionamento dos resistores de base dos transistores na
Ponte H utilizou-se um datasheet dos transistores, além do datasheet do motor
DC a ser utilizado, com suas características nominais. O raciocínio para
dimensionamento dos componentes é feito como se segue: primeiramente
obtêm-se os valores de tensão e corrente nominais do motor. A seguir, de
acordo com os valores obtidos para o motor, procura-se no gráfico de
saturação do coletor do datasheet dos transistores, a linha de corrente de
coletor próxima à corrente do motor e escolhemos um valor para corrente de
base que esteja após o “joelho” da linha, ou seja, um valor que seja suficiente
para fazer o transistor operar como chave. Por último, cruza-se a linha com o
eixo das coordenadas a fim de obter-se o correspondente valor de queda de
tensão entre o coletor e o emissor e, a seguir, o valor de ganho do transistor
pela razão entre a corrente do coletor e a corrente de base. As contas seguem
abaixo:
-Corrente nominal do motor, sem carga no eixo: 17mA;
-Tensão de operação do motor: 5V;
-Corrente de coletor: 20mA;
-Corrente de base: 0,5mA;
-Queda de tensão coletor/emissor: 0,2V
-Ganho do transistor: Ic/Ib = 34
𝑅𝐵 =
(5 − 0.4)[𝑉]
= 9200Ω
(0.5)[𝑚𝐴]
O valor comercial de resistor encontrado que se aproxima do valor
calculado é o de 10KΩ e, por isso, é o que foi utilizado. O valor de 0,4V referese às duas quedas de tensão que ocorrem na malha da Ponte H, quando a
corrente percorre dois transistores.
3. Lista de Componentes
1. 1 Regulador de tensão 7805
2. 1 Capacitor 100nF
3. 1 Capacitor 330nF
4. 6 Resistores 10KΩ
5. 2 Resistores 330Ω
6. 2 LED’s vermelhos
7. 2 Botões switch
8. 2 Transistores BC547
9. 2 Transistores BC558
10. 1 PIC 16F683
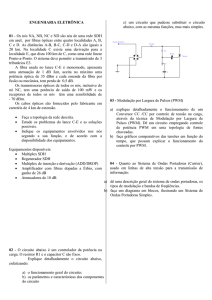
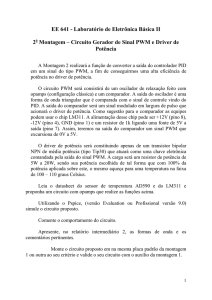
4. Função dos Componentes
O regulador de tensão 7805 tem a função de baixar a tensão de
alimentação de 12V da fonte para 5V, tensão esta que será utilizada no
sistema de controle; os capacitores de 100nF e 330nF servem para filtrar
qualquer ruído proveniente da fonte; 4 dos resistores de 10 KΩ servem para
conduzir o sinal proveniente do PIC, sendo um para cada transistor; 2 dos
resistores de 10 KΩ restantes são para pull-down dos 2 botões, sendo que 1
botão funciona como mode e o outro como set; os 2 resistores de 330Ω servem
um para cada um dos 2 LED’s indicativos de mode, a saber PWM e Ponte H;
Os transistores BC547 e BC548 servem para conduzir a corrente no motor
quando suas bases forem sensibilizadas conforme o sinal proveniente do PIC e
conforme o esquema da Ponte H; o PIC 16F683 serve para realizar o controle
dos sinais que vão para a Ponte H, ativar os LED’s que indicam o modo de
operação do motor e receber os sinais vindos dos botões.
Figura 3 – Esquemático do Sistema Eletrônico
5. Conclusão
A utilização da Ponte H e de um sinal PWM para o controle de motores
é, conforme viu-se anteriormente, muito conveniente, no que diz respeito à
simplificação dos circuitos eletrônicos de controle. O sinal PWM com sua
variação de largura de pulso propicia valores equivalentes de uma tensão
analógica, mas ainda são sinais digitais, permitindo o controle de velocidade do
motor; a Ponte H permite, com um simples raciocínio, construir um circuito para
inversão do sentido da velocidade de um motor DC. Uma rápida análise feita a
partir de um datasheet dos transistores de chaveamento elucida o
dimensionamento dos componentes da Ponte H, com auxílio das
características nominais do motor em questão.