Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
MODELAGEM E CONTROLE DOS CONVERSORES DAB E TAB UTILIZANDO A TEORIA DO
GYRATOR
WALBERMARK M.DOS SANTOS, DENIZAR C. MARTINS
Instituto de Eletrônica de Potência-INEP, Departamento de Engenharia Elétrica-DEE, Universidade Federal
de Santa Catarina –UFSC, Caixa Postal 5119, Cep: 88040-970
E-mails: [email protected], [email protected]
Abtract This paper presents the modeling and control of the converters DAB (Dual Active Bridge) and TAB (Triple Active
Bridge ) single phase, using the gyrator theory. It is determined the gyrostatic coefficient between the ports of the converter DAB
and between the ports of the converter TAB. The gyrostatic coefficient is used as the main variable for voltage control in the load
ports of these converters. In the case of the TAB converter, the voltage control in the load port is performed by adopting the policy of current proportional sharing between the generator ports. Computer simulations and experimental results are presented validating the developed methodology.
Keywords DAB Converter,TAB Converter,Gyrator, Modeling and Control, Proportional sharing of current
Resumo Este trabalho apresenta a modelagem e controle dos conversores DAB (Dual Active Bridge) e TAB (Triple Active
Bridge) monofásicos, utilizando a teoria do gyrator. É determinado o coeficiente gyrostático entre as portas do conversor DAB e
entre as portas do conversor TAB. Usa-se o coeficiente gyrostático como principal variável de controle das tensões nas portas de
carga desses conversores. No caso do conversor TAB, o controle da tensão na porta de carga é realizado adotando-se a política da
divisão proporcional de corrente entre as portas geradoras. Simulações computacionais e alguns resultados experimentais são apresentados validando a metodologia desenvolvida.
Palavras-chave Conversor DAB,Conversor TAB,Gyrator, Modelagem e Controle, Divisão proporcional de Corrente
1
Introdução
A introdução do conceito de gyrator na literatura
foi feito por (Tellegen, 1948) na década de 40.
Segundo (Tellegen, 1948) existem basicamente 5
(cinco) tipos de elementos lineares utilizados em
circuitos elétricos: a resistência, a capacitância, a
indutância (ambos elementos de uma porta), o
transformador e o quinto elemento definido por ele
como gyrator (estes dois últimos elementos de duas
portas).
O gyrator, elemento que pode ser visto como uma
variação do transformador (Barazarte, 2010) é uma
rede realizável de duas portas, antirecíproca, que
acopla a porta de entrada à porta de saída através de
um coeficiente chamado de coeficiente girostático
(Ehsani,1993).
Um dos requisitos básicos para um sistema ser
representado por gyrator é satisfazer a condição de
conservação de potência ou condição POPI (Power
Output equals Power Input). Diversos conversores
chaveados podem satisfazer a condição POPI através
de um controle em malha fechada de tensão ou
corrente. Porém os conversores DAB e TAB,
possuem naturalmente comportamento de gyrator
entre suas portas (Barazarte, 2010), (EHSANI,1993).
ISBN: 978-85-8001-069-5
Aproveitando essa característica, em dos Santos
et.all (2011), é introduzida uma metodologia
utilizando a teoria do gyrator para dimensionamento
do conversor DAB. Resultados computacionais e
experimentais são apresentados, validando a
metodologia proposta.
Todavia em dos Santos et.all (2011), são
apresentados somente resultados do conversor
funcionando em malha aberta.
Dessa forma, nesse trabalho é desenvolvido o
controle do conversor DAB utilizando o circuito
equivalente derivado da teoria do gyrator.
Como extensão, apresenta-se também neste
trabalho, uma abordagem do conversor TAB
utilizando-se a mesma teoria. Para este conversor, é
desenvolvido um controle com desacoplamento entre
as portas e realizada uma divisão proporcional de
corrente entre as fontes geradoras.
Para uma melhor apresentação do trabalho, o
mesmo é dividido em 3 seções: na primeira seção é
apresentado a origem do gyrator e o objetivo do
trabalho; na segunda seção é apresentada a
modelagem matemática sucinta dos conversores
DAB e TAB utilizando a teoria do gyrator, e o
desenvolvimento de suas malhas de controle; e na
terceira seção, são apresentados alguns resultados de
simulação e experimental com base nesta teoria.
3678
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
2 Modelagem dos conversores e de seus controles
utilizando o gyrator
A variável g12 tem unidade 1 e é o gyrator
condutância do conversor DAB. Da mesma forma,
pode-se definir para a corrente de entrada a equação
2.1 O conversor DAB(Dual Active Bridge)
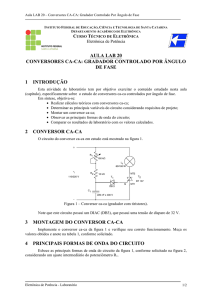
Na Figura 1, mostra-se a topologia do conversor
DAB da forma tradicional, onde a porta 2 alimenta
uma carga resistiva.
A potência em watts transmitida entre as portas,
negligenciando as perdas, é dada por
P
V1 V2
1
a L
(1).
V2
P
I1
1
V1
a L
(5)
Na forma matricial, a relação entre as correntes e
as tensões nas portas do conversor pode ser expressa
por (6).
I1 0
I g
2 12
g12 V1
0 V2
(6)
A obtenção de (1) de forma detalhada é encontrada
em dos Santos (2011).
Dessa forma então, o conversor DAB pode ser
representado como um gyrator de duas portas, como
mostrado na Figura 2.
Figura 1: Conversor DAB
Figura 2. Circuito do DAB como gyrator
onde
V1 , V2 -tensões nas portas 1 e 2 respectivamente;
N2
-razão entre as espiras dos enrolamentos
N1
secundários e primários respectivamente;
2 1 -defasagem angular entre as tensões nas
portas, dado em radianos;
L -indutância total (externa + dispersão), em Henry;
2 f - é a freqüência de operação do conversor em radianos/segundo e
f -freqüência de operação em Hertz.
a
Partindo-se de (1), e considerando o sistema
conservativo, a corrente de saída do conversor pode
ser determinada por
V1
P
I2
1
V2
a L
(2)
De (2), observa-se que a corrente de saída do
conversor DAB é o produto da tensão de entrada por
uma variável que tem unidade de condutância.
Assim a corrente na carga pode ser redefinida como
I 2 g12 V1
Com base em (3), determina-se um circuito
elétrico equivalente visto da porta 2, onde a carga é
alimentada por uma fonte de corrente, como
mostrado na Figura 3.
Figura 3. Circuito elétrico equivalente do DAB visto do lado da
carga (porta 2)
Considerando a tensão de entrada fixa, observa-se
da Figura 3 que a tensão sob a carga pode ser
controlada pelo ajuste do gyrator. Assim, uma
sugestão de controle da tensão de saída é apresentada
na Figura 4.
(3)
onde
g12
1
1
a L
(4).
Figura 4. Controle da tensão na carga do DAB
ISBN: 978-85-8001-069-5
3679
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
Considerando o controle a partir de um ponto de
operação qualquer, têm-se para o circuito da Figura 4
R2
I 2
R2C2 s 1
V2
I 2 g12 V1
conversor TAB (Haimin;Duarte,2008),(Haimin;
Kotsopoulos,2008), conforme se mostra na Figura 6.
(7)
(8)
Para a determinação de g , é considerada a aproximação
Figura 6. Conversor TAB
8
1 2 sen
(9).
Dessa forma, substituindo-se (9) em (4) e
considerando uma pequena variação angular em
torno do ponto de operação sen() , g é
determinado por
g
1
8
a L 2
(10).
Para simplificar o estudo do fluxo de potência
entre as portas do conversor TAB, é determinado um
modelo equivalente para o transformador
(Duarte,2007).
Quando feito isto, o conversor pode ser visto como
uma pequena rede de energia elétrica de alta
freqüência. Nesta rede, conforme mostrado na
Figura 7, as portas são as “barras” do sistema e o
fluxo de potência circula entre as 3 (três) barras por
intermédio de indutâncias ou ramos que as
interligam.
De posse de (10), (7) e (8), chega-se à malha de
controle da tensão de saída mostrada na Figura 5.
Figura 5. Laço de controle da tensão na porta 2
Onde
kT 1000
é o ganho do modulador phase-shift
do DSP TMS320F2808 que foi utilizado;
G
8V1
aL2
H 2 ( s)
Figura 7. Rede equivalente do conversor TAB
é o ganho natural do laço de controle;
R2
R2C2 s 1
é a função de transferência da
O fluxo de potência entre as barras da Figura 7 é
determinado por
planta;
kv 2 0, 007 é
ganho da malha de realimentação de
tensão utilizada.
Assim, ficam determinados todos os elementos
necessários para o controle da tensão de saída do
conversor DAB, utilizando o circuito equivalente que
advêm de sua modelagem como gyrator.
No próximo item, é realizado um procedimento
semelhante para o conversor TAB.
P31
V3 .V1
31 1 31
L31 n3
(11)
P12
V1 V2
12 1 12
L12 n2
(12)
P32
V3 V2
32 1 32
L32 n3 n2
(13).
onde
2.2 O conversor TAB(Triple Active Bridge)
Partindo-se do conversor DAB, quando é colocado
mais um enrolamento no transformador e,
conseqüentemente, mais um conversor ponte
completa
neste
enrolamento,
a
literatura
especializada denomina a topologia resultante de
ISBN: 978-85-8001-069-5
12 2 1
31 1 3
32 2 3
(14)
é a defasagem angular entre as tensões das barras,
3680
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
lm
n2 l l a2
m
1
l
n m a
3
3
lm l1
(15)
são relações de transformações entre os enrolamentos
secundários e terciários com relação ao enrolamento
primário considerando a queda de tensão na indutância de dispersão do enrolamento primário,
a2
a
3
N2
N1
N3
N1
(16)
é a relação entre o número de espiras dos enrolamentos do transformador e o enrolamento primário; e lm
Figura 8: Representação do TAB como 3 gyrators acoplados.
As equações (21), (22) e (23) podem ser representadas na forma matricial como
I1 0
I 2 g 21
I 3 g31
é a indutância de magnetização vista do lado primário, l1 é a indutância de dispersão do enrolamento
primário.
Convencionando-se que as injeções de potência
nas barras são dadas por
P1 P31 P12
P12 P32 P2
P P P
3
31 32
(17),
e substituindo-se (17) devidamente em (11), (12) e
(13), a potência injetada em cada barra é dada por
P1
V3 V1
V1 V2
12 1 12
31 1 31
L
n
L12 n2
31 3
(18)
P2
V3 V2
V1 V2
12 1 12
32 1 32
L
n
n
L12 n2
31 2 3
(19)
P3
V3 V1
V3 V2
31 1 31
32 1 32
L
n
n
L31 n3
32 3 2
(20)
g12
0
g32
g13 V1
g 23 V2
0 V3
(24)
onde
g 21 g12
g31 g13
g g
23
32
(25)
são os gyrators condutância entre as portas do conversor TAB, dados por
12
1 12
g12
L
n
12 2
31
1 31
g31
L31 n3
32
g
1 32
32 L32 n2 n3
(26).
De (24) pode-se determinar a corrente na porta 2
como
I 2 g12 V1 g32 V3
(27),
cujo circuito elétrico equivalente é mostrado na Figura 9.
Dividindo-se (18), (19) e (20) pelas tensões de
suas respectivas portas, determina-se as injeções de
correntes nas portas do conversor como
I1
V3
V2
12 1 12
31 1 31
L
n
L12 n2
31 3
(21)
I2
V3
V1
12 1 12
32 1 32
L12 n2
L32 n2 n3
(22)
I3
V1
31 1 31
L31 n3
(23).
V2
32 1 32
L
n
n
32
2
3
Verifica-se de (21), (22) e (23) que similar ao
conversor DAB, o conversor TAB também pode ser
modelado utilizando a teoria do gyrator.
Então a representação do conversor TAB na forma
de gyrator, fica como mostrada na Figura 8.
ISBN: 978-85-8001-069-5
Figura 9: Circuito elétrico equivalente do TAB visto do lado da
carga (porta 2).
Da mesma forma que no conversor DAB,
verifica-se que no conversor TAB o controle da
tensão na carga pode ser realizado ajustando-se o
valor das fontes de correntes equivalente, vista pela
porta de carga, através do ajuste dos respectivos
gyrators entre as portas.
3681
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
Todavia, observa-se um forte acoplamento entre as
portas 1 e 3, visto que o valor do gyrator
g31 depende dos ângulos 12 e 32 .
Para resolver este problema, no presente trabalho
foram adotadas duas ações: 1) foi feito o
desacoplamento dinâmico entre as fontes de tensão,
utilizando a técnica destilation (Chuanhong ,20052008); 2) foi adotada como porta de referência a
porta de carga. Isso faz com que 2 0 , e o
conversor seja forçado a operar no 4ºquadrante.
Então, as relações angulares entre as tensões nas
portas ficam dadas por
12 1
32 3
32
12
31
(28).
Usando-se a mesma aproximação de (9), têm-se
para os ângulos entre as tensões no transformador do
TAB as relações
31 1 31
8
2 sen 31
(29)
8
32 1 32 2 sen 32
(30).
G
(31)
onde
I1
V2
8
cos 12 ...
12 L12 n2 2
V3
8
sen(32 ) sen(12 ) ...
L31 n3 2
V2
8
cos(32 )
L32 n3 n2 2
(35).
Determina-se uma matriz X inversa à matriz dos
pontos de operação do conversor dada por
X
X
11
X 21
I1
X12 12
X 22 I 3
12
I1
32
I 3
32
1
(36)
Dessa forma, para um determinado ponto de
operação, as correntes nas portas 1 e 3 podem ser
determinadas como
I1
I1 12
I 3 I 3
12
I1
32
I 3
32
1
I1
12
I 3
12
I1
32 ˆ 12
(37),
I 3
ˆ 32
32
(38).
Dessa maneira, percebe-se que as correntes nas
portas geradoras ficam dependentes somente do
ângulo entre a referida porta e a porta de carga. Em
outras palavras, as correntes entre as fontes
geradoras estão desacopladas.
Nesta situação então, têm-se o sistema MIMO do
conversor, incluindo o desacoplamento, mostrado na
Figura 10, onde ̂12 e ̂32 são os ângulos gerados
pelos compensadores de corrente das portas 1 e 3
respectivamente.
(32)
V3
8
cos(12 ) cos(32 )
L31 n3 2
V3
I1
8
cos 32 cos 12 ...
32
L31 n3 2
V1
8
sen(12 ) sen(32 ) ...
L31 n3 2
I1 1 0 ˆ 12
I 3 0 1 ˆ 32
I1
32
I 3
32
o que pela propriedade da multiplicação de matrizes
resulta em
Para desacoplar as malhas de controle das portas
de geração, inicialmente é determinada uma matriz
G que contêm os pontos de operação desejado do
conversor, dada por
I1
G11 G12 12
G21 G22 I3
12
I3
V1
8
cos 32 cos 12 ...
32 L31 n3 2
V3
8
sen(12 ) sen(32 )
L31 n3 2
I3
V1
8
sen 32 sen 12 ...
12
L31 n3 2
V1
8
cos(12 ) cos(32 )
L31 n3 2
(33)
Figura 10: Sistema MIMO do conversor, com desacoplamento
entre as malhas de corrente da porta 1 e porta 3
(34)
Observando-se as Figuras 9 e 10, pode-se dizer
que no ponto de operação com desacoplamento entre
as malhas, consegue-se
g12V1 I1
g32V3 I3
ISBN: 978-85-8001-069-5
(39),
3682
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
Assim, a corrente de carga I 2 pode ser dada por
I 2 I1 I3
(40).
De (40) observa-se que para suprir uma
determinada corrente de carga I 2 , as correntes I1 e
I 3 combinam-se de forma linear. Dessa maneira (40)
pode ser reescrita como
I 2 1I1 3 I3
3 Simulações computacionais e resultados experimentais
(41)
Nesta seção, mostram-se os resultados das
simulações computacionais com o conversor TAB e
simulações
computacionais
e
resultados
experimentais para o conversor DAB, utilizando a
teoria apresentada e os controles desenvolvidos.
Nas tabelas 1 e 2 respectivamente, resume-se os
parâmetros dos conversores DAB e TAB utilizados.
Tabela 1: Especificação do Conversor DAB
onde 1, 3 são pesos atribuídos as correntes das
portas 1 e 3 que satisfaçam a condição 1 3 1 .
Inserindo-se essa condição no circuito da Figura 9,
as malhas de controle sugeridas nesse trabalho ficam
como mostradas na Figura 11.
Principais dados do conversor DAB
V1; V2
130;110V
P
900 W
fs
50 kHz
L
33µH
a
1
Tabela 2: Especificação do Conversor TAB
Figura 11: Controle de tensão da porta 2 do TAB
Na Figura 11, observa-se que o sistema de
controle proposto consta de: um compensador de
tensão responsável por gerar a corrente de referência
da porta 2; a referência de corrente na porta 2 é
multiplicada por pesos 1, 3 , determinando-se
então as referências de corrente das portas 1 e 3
respectivamente; cada porta possui um compensador
de corrente, que vai garantir com que seja entregue a
corrente solicitada da mesma.
O diagrama completo das malhas de controle do
sistema, incluindo os ganhos de realimentação, a
malha de desacoplamento e a divisão proporcional
das correntes nas portas, é apresentado na Figura 12.
Principais dados do conversor TAB
V1;V2;V3
200;400;150V
N1;N2;N3
16;32;12
L12;L31;L32
300;300;300µH
P2
2kW
P1;P3
1kW
fs
50kHz
1 3
0,5
3.1 Simulações para o conversor TAB
Uma simulação foi realizada para o conversor
TAB com o intuito de validar a metodologia de
controle proposta.
A carga é variada entre 50% e 100% de seu valor.
Na Figura 13 mostra-se o comportamento da tensão
na carga, destacando-se que o controle mantém a
tensão regulada em seu valor nominal
Na Figura 14, mostra-se os valores de corrente nas
portas (de carga e geradoras). Observa-se que, considerando a relação de transformação, há uma divisão
proporcional de corrente entre as fontes.
Figura 12: Controle de tensão da porta 2 com desacoplamento e
divisão proporcional de corrente
Figura 13: Controle de tensão para variação de carga
ISBN: 978-85-8001-069-5
3683
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
Na Figura 16 mostra-se o comportamento da
tensão na carga para variação da mesma. Observa-se
que o controle mantêm a tensão no valor
especificado de 110V. Na Figura 17 mostra-se a
variação da potência na carga.
Figura 14: Valores de correntes nas portas de carga e geradoras
para o conversor TAB
Figura 17: Simulação da potência consumida pela carga
3.2 Simulações e resultados experimentais para o
conversor DAB
Para validar a metodologia proposta foram
realizadas simulações computacionais e testes de
bancada com o conversor DAB.
Na Figura 15 é mostrada a resposta em freqüência
para a função de transferência de malha aberta da
tensão. O compensador usado é um PI e a frequencia
de corte ficou em torno de 200Hz. Observa-se que a
margem de fase ficou em torno de 50º o que garante
a estabilidade.
Na Figura 18 é mostrado o resultado experimental
da forma de onda de corrente e tensão na carga para
os mesmos valores de troca de carga usados na
simulação. Observa-se que o controle responde de
forma rápida. Na Figura 19 é mostrado o resultado
experimental da potência consumida pela carga,
destacando-se que chega-se em torno de 850W .
V2
I2
Figura 15: Resposta em freqüência para a função de transferência
em malha aberta da tensão
Figura 18: Resultado experimental para tensão na carga (V2)
50V/div; e corrente na carga (I2) 2A/div
Para verificar a validade do controle no conversor
DAB, foi realizada uma simulação computacional na
qual a carga na porta 2 é variada entre 50% e 100%
do seu valor nominal.
Figura 16: Simulação do controle de tensão para variação de carga
ISBN: 978-85-8001-069-5
Figura 19: Resultado experimental para potência consumida pela
carga (500W/div)
3684
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
Conclusão
Neste trabalho apresentou-se o desenvolvimento
do controle para os conversores DAB e TAB
utilizando seus circuitos equivalentes derivados da
teoria do gyrator.
Mostrou-se que, por serem gyrators naturais,
obtêm-se circuitos equivalentes simplificados destes
conversores, o que facilita em alguns aspectos, o
entendimento de seu funcionamento e a concepção
de um circuito de controle.
No caso do conversor TAB, além do
desenvolvimento do controle de tensão na carga
através do circuito equivalente do gyrator,
apresentou-se uma proposta de controle baseada na
divisão proporcional de corrente entre as portas
geradoras.
As análises teóricas foram validadas por
simulações computacionais para ambos os
conversores e resultados experimentais para o
conversor DAB.
Nas duas situações, a proposta de controle
mostrou-se satisfatória.
Dissertação de Mestrado.Universidade Federal
de Santa Catarina,Instituto de Eletrônica de
Potência,Junho,2011.
Duarte, J. L.; Hendrix, M.; Simoes, M. G.( 2007).
Three-Port Bidirectional Converter for Hybrid
Fuel Cell Systems, IEEE Transactions on Power
Electronics, Vol. 22, n°. 2, pp. 480-487.
EHSANI, M.; Husain, I.; Bilgic, M. O.( 1993).
Power Converters as Natural Gyrators, circuits
and
systems.
IEEE
Transactions
on
Fundamental Theory and Applications, Vol. 40,
n°. 12, pp. 946-949.
Haimin, T.; Duarte, J. L.; Hendrix, M. A. M.( 2008).
Multiport Converters for Hybrid Power Sources,
IEEE Power Electronics Specialists Conference,
2008. Pesc 2008. Vol., pp. 3412-3418, 15-19
June.
Haimin, T; Kotsopoulos, A.; Duarte, J. L. et
al.(2008), Transformer-Coupled Multiport ZVS
Bidirectional DC-DC Converter with Wide Input
Range,
IEEE
Transactions
on Power
Electronics,Vol. 23, n°. 2, pp. 771-781 .
Tellegen, B. D. H.( 1948). The Gyrator, a New
Eletric Network Element, Philips Research
Laboratories,The Netherlarnds.
Agradecimentos
Os autores agradecem à CAPES e ao CNPQ pelo
aporte financeiro para o desenvolvimento de
pesquisa, e ao INEP(Instituto de Eletrônica de
Potência) pelo suporte logístico e de infra-estrutura
necessária para o desenvolvimento deste trabalho.
Referências Bibliográficas
Barazarte, R. Y.; Gonza; X et al.( 2010), Generalized
Gyrator Theory, IEEE Transactions on Power
Electronics, Vol. 25, n°. 7, pp. 1832-1837.
Chuanhong, Z.; Round, S. D.; Kolar, J. W.( 2008).
An Isolated Three-Port Bidirectional DC-DC
Converter with Decoupled Power Flow
Management, IEEE Transactions on Power
Electronics, Vol. 23, n°. 5, pp. 2443-2453.
Chuanhong, Z.; Round, S.; Kolar, J. W.( 2005).
Buck and Boost Start-up Operation of a ThreePort Power Supply for Hybrid Vehicle
Applications. IEEE 36th Power Electronics
Specialists Conference, 2005. Pesc '05., vol.,
pp. 1851-1857, 16-16 June.
dos Santos, W. M.; Ortmann, M. S.; Schweitzer, R.
et al.(2011), Design and Conception of a DAB
Converter (Dual Active Bridge) Using the
Gyrators Theory. Power Electronics Conference
(COBEP), 2011 Brazilian, vol., pp. 359-364,
11-15 Sept.
dos Santos(2011), W.M. Estudo e Implementação do
Conversor TAB (Triple Active Bridge) Aplicado
a Sistemas Renováveis Solares Fotovoltaicos.
ISBN: 978-85-8001-069-5
3685